
Non-intrusive Distracted Driving Detection based on
Driving Sensing Data
Sasan Jafarnejad, German Castignani and Thomas Engel
Interdiscipl. Centre for Security, Reliability & Trust (SnT), University of Luxembourg, Esch-Sur-Alzette, Luxembourg
Keywords:
Distraction, Inattention, Driver Behavior, Machine Learning, Driver Modeling.
Abstract:
Nowadays Internet-enabled phones have become ubiquitous, and we all witness the flood of information that
often arrives with a notification. Most of us immediately divert our attention to our phones even when we
are behind the wheel. Statistics show that drivers use their phone on 88% of their trips, in 2015 in the United
Kingdom 25% of the fatal accidents were caused by distraction or impairment. Therefore there is need to tackle
this issue. However, most of the distraction detection methods either use expensive dedicated hardware and/or
they make use of intrusive or uncomfortable sensors. We propose a distracted driving detection mechanism
using non-intrusive vehicle sensor data. In the proposed method 8 driving signals are used. The data is
collected, then two sets of statistical and cepstral features are extracted using a sliding window process, further
a classifier makes a prediction for each window frame, lastly, a decision function takes the last l predictions
and makes the final prediction. We evaluate the subject independent performance of the proposed mechanism
using a driving dataset consisting of 13 drivers. We show that performance increases as the decision window
gets larger. We achieve the best results using a Gradient Boosting classifier with a decision window of total
duration 285 seconds which yields ROC AUC of 98.7%.
1 INTRODUCTION
Nowadays Internet-enabled smart-phones have be-
come ubiquitous, and we all witness the flood of in-
formation that often arrives with a notification. Most
of us immediately divert our attention to our smart-
phones regardless of what we are doing and fre-
quently we do so even when we are behind the wheel.
A recent study have shown that drivers use their
phones in about 88% of their trips, and in average
they spend in 3.5 minutes of each hour of driving on
their phone
1
. Although mobile-phone related distrac-
tions are only a subset of all driving distractions, it
has been proven that driving distractions are danger-
ous to passenger safety (Klauer et al., 2010). Recent
statistics indicate that a large portion of fatal accidents
are caused due to driver distractions. For example
according to Department of Transport of the United
Kingdom, in 2015 about 25% of fatal accidents were
caused by distraction or impairment
2
. This implies
that any solution that mitigates distracted driving even
by a small amount can save lives. This motivates us to
1
http://blog.zendrive.com/distracted-driving/
2
https://www.gov.uk/government/statistics/reported-
road-casualties-great-britain-annual-report-2015
propose a distracted driving detection mechanism that
is able to detect and warn the driver at such moments
and can be available for the majority of car owners.
Although this work is not the first attempt at solv-
ing this problem, it follows a novel and ambitious ap-
proach. Current literature mostly uses dedicated sen-
sors to detect distractions, sensors such as cameras
for tracking head orientation (W
¨
ollmer et al., 2011) or
measuring the skin temperature (Wesley et al., 2010),
however we propose to only use the standard vehicle
sensors, therefore this method could be applicable to
the most of the commercial vehicles on the market.
In this approach we do not use any intrusive sen-
sors such as cameras or microphones, instead we fo-
cus on car driving data. We aim to classify driving
segments as distracted or not distracted driving. Such
a system can be used on-line to alert the driver in
case of continuous distraction. Or alternatively can
be employed off-line as a metric to judge the driv-
ing performance or for risk assessment of the driver.
First we use a sliding window to extract features from
driving signals, then using machine learning we clas-
sify each window as distracted or not-distracted, then
we use a decision function to decide whether a se-
quence of window frames represent distracted driving
178
Jafarnejad, S., Castignani, G. and Engel, T.
Non-intrusive Distracted Driving Detection based on Driving Sensing Data.
DOI: 10.5220/0006708401780186
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 178-186
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

or not. We propose to validate this method using driv-
ing traces from 13 drivers chosen from a large driving
dataset called UYANIK (Abut et al., 2007). For eval-
uation we present the performance of the proposed
method in terms of F
1
score and area under the Re-
ceiver Operating Characteristic curve (ROC AUC).
The remainder of the paper is organized as fol-
lows, at Section 2 we present an overview of the prior
work on distraction detection that is relevant to this
work, in Section 3 we describe the dataset used for
validation, next in Section 4 we describe our proposed
methodology and the evaluation strategy. In Section 5
we present the evaluation results and in Section 6 we
discuss the obtained results. Lastly in Section 7 we
conclude and present the future directions.
2 RELATED WORK
Researchers have been trying to reach a consensus for
the definition of distracted driving however although
there have been many attempts at formalizing dis-
tracted driving there are still discussions around this
subject. Inattention is a major cause of unsafe driv-
ing and accidents, however inattention itself can be
caused by various means. According to the latest
driver inattention taxonomy from the United States
and European Union Bilateral Intelligent Transporta-
tion Systems Task Force (Engstr
¨
om et al., 2013)
driver drowsiness and driver distraction are two ma-
jor processes that give rise to inattention. There is a
large body of research in the literature attending to
both drowsiness and distraction detection, however in
this section we focus on distraction detection as it is
also the aim of this work. According to Lee et al.
driver distraction is: ”Driver distraction is a diversion
of attention away from activities critical for safe driv-
ing toward a competing activity.” (Lee et al., 2009).
Distraction affects the act of driving in various ways,
Dong et al. have categorized these effects into three
categories (Dong et al., 2011):
1. Driver Behavior Patterns - This category covers
patterns of actions such as rear-view mirror checks
or forward view inspection activities during driving.
Harbluck et al. show that drivers engaged in cogni-
tively difficult tasks, reduce their visual monitoring of
the mirrors and instruments to the extent that some
entirely abandon these tasks (Harbluk et al., 2007).
It is also shown that compared to low workloads un-
der medium and heavy cognitive workloads the aver-
age visual field area reduced to 92.2% and 86.41%,
respectively (Rantanen and Goldberg, 1999). These
patterns are difficult to measure and in most cases re-
quire the use of intrusive sensors such as cameras.
2. Physiological Responses - Physiological indica-
tors such as Electroencephalography (EEG), Electro-
cardiography (ECG) signals, skin conductance and
blinking rate are in this category. It has been shown
that EEG workload increased with working memory
load and problem solving tasks (Berka et al., 2007).
In a more recent work researchers demonstrated that
visual and cognitive distraction lead to temperate in-
crease on the skin surface (Wesley et al., 2010). The
main issue with such metrics is the need for dedicated
sensors which are also uncomfortable or intrusive.
3. Driving Performance - Maintaining speed and
lane keeping are two examples of driving perfor-
mance metrics that are affected by distractions. Zhou
et al. show that performing secondary tasks influ-
ences checking behavior (e.g. mirror checking) both
in frequency and duration, which leads to lower rate
of lane changing (Zhou et al., 2008). In another
study Liang and Lee establish that cognitive distrac-
tion makes steering less smooth. Steering neglect and
over-compensation was associated with visual dis-
traction and under-compensation with cognitive dis-
traction (Liang and Lee, 2010). Although advanced
sensors are required to measure metrics such as head-
way distance or lane-changing behavior, such sensors
are not intrusive towards the driver and they are be-
coming more prevalent in the recent vehicles on the
market.
Driver distraction literature has focused on only
one or a hybrid of the above mentioned categories,
however most of the studies take one of the first two
approaches. This could be because they fit better in
already established fields of medical and behavioral
research. In addition such metrics are already well
defined and they have better reliability in distraction
detection. Here we present a few examples from dis-
traction detection methods that are more relevant to
this work. W
¨
ollmer et al. proposed to use head ori-
entation to detect distractions, particularly they detect
user interactions with the instrument cluster. In addi-
tion to that they also employ some of the vehicle oper-
ation signals such as pedal and steering wheel data as
well as some driving performance metrics such as de-
viation from the middle of the traffic lane and heading
angle (W
¨
ollmer et al., 2011). This rich set of signals
then were used as input to a long short-term mem-
ory (LSTM) recurrent neural network, which results
in a subject-independent detection of distraction with
up to 96.6% accuracy.
In a more relevant study Jin et al. develop two mod-
els based on support vector machine (SVM) called
NLModel and NHModel, which are designed to de-
tect low and high cognitive distractions respectively.
In this work they only use data from the vehicle’s
Non-intrusive Distracted Driving Detection based on Driving Sensing Data
179

CAN-bus as input. Signals include vehicle operating
parameters as well as vehicle dynamics. They achieve
accuracy of about 73.8% and sensitivity of approxi-
mately 61.8% (Jin et al., 2012).
In another study Tango and Botta propose a subject
dependent model based on SVM that can achieve ac-
curacies of up to 95%. They only use the dynamic
signals of the vehicle for classification however data
annotation is done accurately with the help of eye-
tracking cameras and human supervision. The ex-
periments are performed in mostly straight highway
drive and at the speeds of around 100km/h. This over
simplification may question robustness and reliability
of the model in real world environments (Tango and
Botta, 2013).
Lastly
¨
Ozturk et al. propose the use of Gaussian Mix-
ture Models (GMM) for distraction detection. This
work is important because they use a similar dataset
as this work, therefore their results can be compara-
ble and could be taken into account as baseline for our
work. They extract cepstral features from the pressure
on Gas and Brake pedals. Using 16-mixture GMM
classifier and a decision window of length 360 sec-
onds they achieve 93.2% success to recognize non-
distracted driving and 72.5% success in recognizing
distracted driving (
¨
Ozt
¨
urk and Erzin, 2012).
3 DATASET
For this study we use a data-set called UYANIK.
This data-set is the result of an international con-
sortium comprised of NEDO (Japan) and Drive-
Safe (Turkey) (Abut et al., 2007; Miyajima et al.,
2009). It is aimed at signal processing applications to
enhance driving experience. Partner universities de-
veloped and deployed sensor-equipped vehicles shar-
ing common requirements to collect data on driving
behavior under various driving conditions. Sabanci
University of Turkey, under the shared framework laid
jointly by the partners; Equipped a Renault Megane
with various sensors to measure dynamic state of the
vehicle and its surrounding environment. Cameras
installed to capture drivers reaction and road traffic.
Microphones capturing the conversations carried on
inside the vehicle. Inertial Measurement Unit (IMU)
and CAN-bus data was recorded to capture vehicle
dynamics and internal state of the car. In addition,
sensors were installed underneath the Brake and Gas
pedals to closely monitor driver reactions. The com-
plete list of available sensor signals is presented in
Table 1.
To collect data, experiments designed to study how
people drive while performing various secondary
tasks. Data collection is done in Istanbul, Turkey,
and consists of a 25 km long stretch which includes
a short ride inside university campus, a city traffic
driving, motorway traffic driving, a dense city traf-
fic driving and, finally, the way back to the point of
departure. A typical trip lasts about 45 minutes. The
whole journey is divided in 4 segments, denoting dif-
ferent secondary tasks: a) Reference Driving b) Query
Dialogue c) Signboard Reading and Navigation Dia-
log d) Pure Navigational Dialog (Refer to (Abut et al.,
2007) for more information.).
3.1 Synchronization and Annotation
Each driving session in the dataset is composed of
files containing data for each data source, that is Lo-
cation, CAN-bus, IMU, Laser range-finder, as well
as audio and video files. Although data files con-
tain synchronized timestamps, they all have differ-
ent sampling rates and fusing this data together is a
cumbersome task. Since in this work our aim is to
build a model to detect distracted driving, we need to
have our dataset annotated so it can be used to train
machine learning models. Here we face two chal-
lenges a) Despite all the efforts of the research com-
munity identifying a driver as distracted is extremely
subjective. b) our video or audio files are not syn-
chronized with the sensor measurements, and without
having the two synchronized it is impossible to use
the dataset for our intended purpose. To tackle the
synchronization issue we took inspiration from (Frid-
man et al., 2016). The general idea is that in a mov-
ing vehicle, rotations in steering wheel results in lat-
eral movements of the vehicle. These lateral move-
Table 1: Sensor Data Available in UYANIK.
Channel Source Details
Video facing the driver Retrofitted 15 fps 480x640
Video facing the road Retrofitted 15 fps 480x640
Driver microphone Retrofitted 16 KHz 16-bit
Rear-view microphone Retrofitted 16 KHz 16-bit
Cellphone microphone Retrofitted 16 KHz 16-bit
Steering wheel angle CAN-Bus 32 Hz degrees
Steering wheel rel. speed
CAN-Bus 32 Hz °/s
Vehicle speed (VS)
CAN-Bus 32 Hz km/h
Individual wheel speeds CAN-Bus 32 Hz km/h
Engine RPM (ERPM) CAN-Bus 32 Hz, rpm
Yaw rate (YR) CAN-Bus 32 Hz
Clutch state CAN-Bus 32 Hz, 0/1 state
Reverse gear CAN-Bus 32 Hz, 0/1 state
Brake state CAN-Bus 32 Hz, 0/1 state
Clutch CAN-Bus 32 Hz, 0/1 state
Brake & Gas
Pedal Pressure
Retrofitted Kg-force/cm
2
XYZ directional acc. IMU 10 Hz
Laser rage-finder Retrofitted 1-2 Hz, 181°
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
180

ments are visible in the front facing camera feed and
they should correlate with steering wheel movements.
Therefore if we find the time lag that results in the
largest cross correlation between the two signals we
can use it to synchronize the videos with other sensor
data. To achieve this goal, first we use the front fac-
ing video feed to estimate vehicle’s lateral movements
using a dense optical flow algorithm based on Gunner
Farneback’s algorithm (Farneb
¨
ack, 2003). Then we
use the resulting lateral movements signal and maxi-
mize its cross correlation with the steering wheel an-
gle (SWA). This method produces satisfying results
for the majority of the recordings. Having the videos
and sensor data synchronized, next step is to annotate
the videos. For the annotation we do not subjectively
mark the segments that we believe driver is distracted,
instead we mark beginning and the end of the seg-
ments that a secondary task (as mentioned above) is
being performed. Our hypothesis is that there is a pat-
tern vehicle sensor data which can be used to discrim-
inate between the distracted and attentive driving. In
this work we use data from 13 drivers, composed of 2
female and 11 male drivers.
4 METHODOLOGY
We formulate the problem as a supervised learning
problem. In which the input data is a multi-variate
time series recorded from a vehicle and the target is
0 for normal driving and 1 for distracted driving. We
denote a driving trace as (x
(i)
,y
(i)
)
N
i=1
, where x is the
sensor measurements from CAN-bus, y ∈ {0,1} is the
target label and N indicates the total number of mea-
surements. We seek a function h that predicts ˆy for
short driving sequences. Since x is a multi-variate
sequence it is not possible to apply classic machine
learning algorithms, therefore we use the sliding win-
dow approach in order to apply conventional machine
learning algorithms (Dietterich, 2002). We use win-
dow classifier h
w
to map each window frame of length
w into individual predictions. Let d = (w − 1)/2 be
the half-width length of window, for a window frame
at time t, h
w
makes prediction ˆy
t
based on window
frame hx
t−d
,··· ,x
t
,· ·· ,x
t+d
i. To reduce the compu-
tational complexity we make window predictions for
every k = bw ∗ (1 −
r
100
)c samples, where k denote
step size and r indicates the percentage of overlap be-
tween two consecutive window frames. This results in
M =
N
k
window frames. Since it is possible that a win-
dow frame cover both distracted and non-distracted
measurements, we label a window frame as distracted
only if more than 50% of the measurements are dis-
tracted. Each driving trace (x
(i)
,y
(i)
)
N
i=1
is converted
into M window frames, then h
w
is trained using fea-
ture vectors x computed for each window frame and
its corresponding label. Similarly to classify an un-
seen driving trace x, it is first converted into window
frames, then for each window frame at time t feature
vector x
t
is computed and h
w
makes the prediction ˆy
t
based on x. Lastly, we feed l consecutive window
frame predictions (h ˆy
t−l
, ˆy
t−l+1
,· ·· , ˆy
t
i) to the deci-
sion function f which produces the final prediction
for the given sequence.
4.1 Evaluation Method
In order to utilize the entire driving traces D =
{(x
i
,y
i
)}
|C|
i=1
for both training and testing, we employ
a |C| fold cross-validation method called leave-one-
group-out. Each time we train a model using data
from |C|−1 drivers and validate that on the data from
the remaining driver. In other words, each driver is
considered a group, therefore at each fold one driver is
kept out of the training process, then h
w
is trained and
scored based on its prediction performance over the
remaining slice. This is a subject independent model
because model has no information about the driver
that is being tested on. As mentioned in Section 3
we evaluate the proposed mechanism using data from
13 drivers therefore in this case |C|= 13.
Drivers typically drive attentively but sometimes
they get distracted by engaging in secondary tasks.
We see the same pattern in our dataset, in average only
36% of the measurements are labeled as distracted.
Since the dataset is imbalanced in order to have a bet-
ter measure of the proposed model’s performance we
choose to report F
1
score as well as ROC AUC as the
main performance metrics. F
1
score is simply the har-
monic mean of precision and recall:
F
1
= 2 ·
1
1
recall
+
1
precision
(1)
Moreover since our classification problem is bi-
nary, based on the application needs we can mod-
ify the decision threshold. In order to avoid intro-
ducing new parameters and discuss how one may
tune them, we employ the receiver operating charac-
teristic (ROC) plot which demonstrates the diagnos-
tic ability of a binary classifier as its discrimination
threshold is being changed. In fact we use ROC AUC
which is a simple way of reporting ROC plot using
only one value (area under the ROC curve).
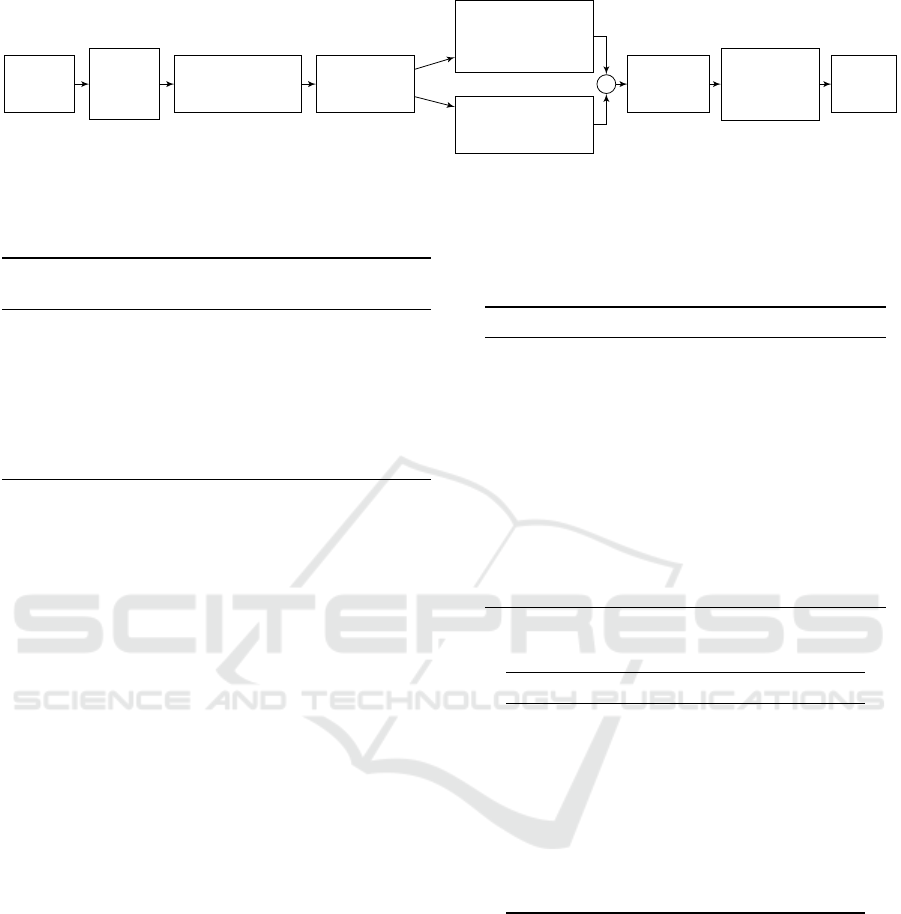
4.2 Feature Extraction
In order to remove high frequency noise, first we ap-
ply a low pass filter to all the signals to smoothen the
Non-intrusive Distracted Driving Detection based on Driving Sensing Data
181
Driving
Signals
Low
Pass
Filter
Add 1
st
order
derivatives
Windowing
Function
PGP
SWA
All Signals
Extract
Statistical
Features
Extract Cepstral
Features
Classifier
h
w
Decision
Function
f
MV
or f
MS
Output
ˆy
Figure 1: Distraction Detection Process.
Table 2: Selected Signals for Driver Identification.
Sensor
1
st
order
Cepstral
Derivative
Percentage Gas Pedal (PGP) Yes Yes
Str. Wheel Angle (SWA) No Yes
Str. Wheel Rel. Speed (SWRS) No No
Vehicle Speed (VS) Yes No
Engine RPM (ERPM) Yes No
Pitch No No
Roll No No
Yaw No No
signals. Then for some of the signals (Shown in Table
2) we derive the temporal derivative of the signals.
For both smoothing and computation of derivations
we use an implementation of the Savitzky-Golay al-
gorithm (Savitzky, 1964). Figure 1 shows the vari-
ous stages that the signals go through before the fea-
ture extraction step. In this study we use 8 signals
which are listed in Table 2. These signals are obtained
from CAN-Bus or IMU. Then we apply a windowing
function to all the signals which takes two parame-
ters, w to determine the length of window frame and
r to specify amount of overlap between two consecu-
tive window frames. This will break down the sig-
nal into window frames of size w and is ready for
feature extraction stage. Per each signal, 9 statisti-
cal features are extracted from each window frame.
These descriptive statistics are selected to be repre-
sentative of the distribution of sensor values covered
by the window frame. This set includes minimum,
maximum, mean, median, standard deviation, kurto-
sis, skewness and number of zero crossings. We also
extract cepstral features from two signals, percent-
age of gas pedal (PGP) and SWA, these are the vehi-
cle operating inputs that are directly operated by the
driver. Earlier studies have proved that cepstral anal-
ysis are suitable for driver identification (Jafarnejad
et al., 2017;
¨
Ozt
¨
urk and Erzin, 2012), we suspect that
they are also effective for detecting distracted driv-
ing. We compute the cepstral coefficients similar to
Jafarnejad et al. and keep only the first 32 coefficients
and use as cepstral features (Jafarnejad et al., 2017).
4.3 Feature Importance
Table 3: Average Scores For Each Signal.
Signal Mutual Info. F-Test
SWRS 0.517 0.084
ERPM Derivative 0.510 0.059
Pitch 0.490 0.056
PGP Derivative 0.475 0.035
Roll 0.470 0.012
PGP 0.436 0.060
ERPM 0.428 0.359
VS Derivative 0.427 0.088
Yaw 0.425 0.054
VS 0.415 0.792
SWA 0.228 0.061
Cepstral Coefficients PGP 0.029 0.036
Cepstral Coefficients SWA 0.025 0.026
Table 4: Average Scores For Each Function.
Function Mutual Info. F-Test
Min 0.955 0.310
Max 0.933 0.289
Range 0.495 0.076
Median 0.136 0.309
Mean 0.092 0.314
Standard Deviation 0.053 0.067
# Zero crossings 0.040 0.166
Cepstral Coefficients 0.034 0.039
Skewness 0.032 0.041
Kurtosis 0.030 0.081
We perform analysis on the extracted features to eval-
uate their fitness for our experiments. We use two
metrics for this purpose, the conventional F-test and
Mutual Information (MI) as two metrics to evaluate
usefulness of our features as well as some insights
into which features or signals are more important for
our classification task. To get an idea that which sig-
nal is more important, first we compute the MI for all
features, we normalize it and compute the average for
5 best features from each signal. The corresponding
results are presented in Table 3. The signals are listed
in descending order of their MI. We do the similar
analysis for the statistical functions and cepstral coef-
ficients, the corresponding results are presented in Ta-
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
182

ble 4. Among the signals we can observe that features
extracted from steering wheel relative speed (SWRS)
have the highest MI score and the cepstral features
are the worst. In terms of functions used for feature
extraction we can see in Table 4 that very simple func-
tions such as Min, Max, Range, Mean are more useful
that Skewness and Kurtosis.
4.4 Classification Algorithms
We select five classification algorithms to be used as
window classifier h
w
. The following is the list of clas-
sifiers used in this study along with their correspond-
ing parameters.
• AdaBoost (AB) - 200 decision trees as weak
learners, learning rate = 0.75.
• Gradient Boosting (GB) 100 estimators, maxi-
mum depth = 6, maximum features = None, max-
imum depth = 6, learning rate = 0.05.
• Random Forest (RF) 200 estimators, maximum
features = None, maximum depth = 7, class
weight = balanced.
• K-Nearest Neighbors (KNN) # neighbors = 5.
• Support Vector Machine (SVM) RBF kernel, C
= 0.1, γ = 0.01.
For our experiments we use the scikit-learn software
package, all the other parameters are set to their
default values as of scikit-learn version 0.19.2 (Pe-
dregosa et al., 2011).
4.5 Decision Functions
The decision function f determines the final predic-
tion ˆy at time t based on the last l window predictions,
we call this a decision window: h ˆy
t−l
,· ·· , ˆy
t−1
, ˆy
t
i,
therefore l is the number of window frames covered
by a decision window. Below we introduce two de-
cision functions to obtain ˆy and evaluate their perfor-
mance later in Section 5:
1) Majority vote (MV) Let d to denote count of the
window frames in the decision window that are pre-
dicted as distracted driving. Then a decision window
is classified as distracted if
d
l
> 0.5.
2) Maximum score (MS) Let d
0
to be the cumulative
classification score for distracted class. Then a deci-
sion window is classified as distracted if
d
0
l
> 0.5.
5 MODEL PERFORMANCE
In this section we present the results of our experi-
ments. In each subsection we focus on one of the
components of our proposed methodology and dis-
cuss their implications.
5.1 Sliding Window Analysis
In order to find out the optimal sliding window size
we try various window sizes
3
as well as overlap ra-
tios
4
. Since we do not want to have our results influ-
enced by the choice and working mechanism of the
decision function, in these experiments we do not ap-
ply the decision function f and only consider the pre-
dictions from h
w
. The results are presented in Fig-
ure 2, the reported numbers are the average cross val-
idated scores for each combination of r and w pa-
rameters. It is evident that results improve as over-
lap r increases. This can be explained by the fact
that an increase in overlap also increases the number
of window frames and therefore having more exam-
ples for the classifier to learn from. It is also evi-
dent that performance improves as the window size
w increases, since our features are mostly descrip-
tive statistics, having larger window frames filters out
noise from the features therefore larger windows yield
better results. From this section we can conclude that
for both parameters r and w, it is best to choose a
larger value, however such choices have some draw-
backs as well. Larger values for r lead to increase in
number of examples and feature calculations, there-
fore becomes computationally more expensive. On
the other hand larger w results on longer delays in the
predictor, therefore w and r should be selected in a
manner suitable for application needs.
5.2 Classifier Benchmarks
We run our experiments for all of the 5 selected clas-
sifiers and compare their performance as h
w
, meaning
we only score the classifiers for their ability to pre-
dict individual window frames. Results are presented
in Figure 3 (obtained using w = 30s and r = 75%),
when considering ROC AUC score GB yields the best
performance and RF takes the second place.
We also investigate how different classifiers ex-
hibit different behaviors due to the changes of win-
dow size w. Figure 4 depicts the average cross val-
idated ROC AUC and F
1
scores for various window
sizes and fixed overlap ratio of r = 75%. For example
KNN clearly benefits from a larger window frame, be-
cause as it was discussed larger window frames result
in smoother features. On the contrary SVM does not
improve as much as other classifiers do, this may im-
3
Window sizes of 4, 7, 10, 15, 20, 30, 45 and 60
4
Overlap ratios of 0, 25, 50, 75 and 90 percent.
Non-intrusive Distracted Driving Detection based on Driving Sensing Data
183
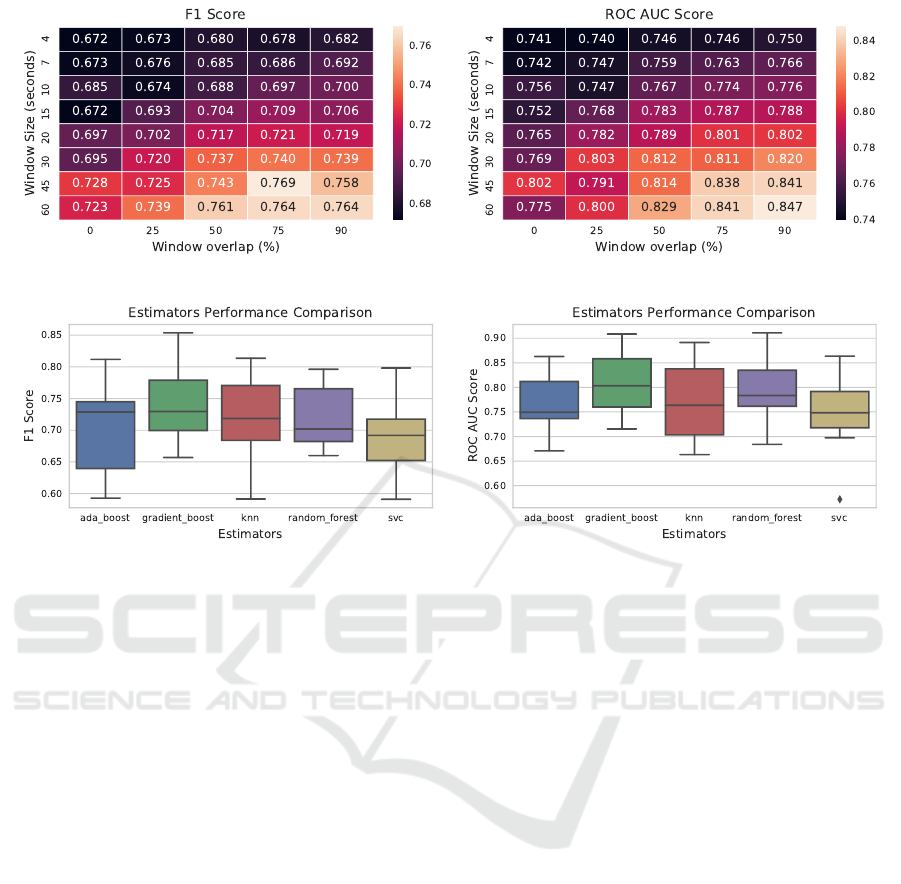
Figure 2: Effect of Window Size on Classification Score.
Figure 3: Estimators Comparison - w = 30s and r = 75%.
prove by tuning the hyper-parameters for every win-
dow size however it is out of scope of this work.
5.3 Decision Function Benchmarks
Decision function f can be seen as a meta classi-
fier which simply aggregates predictions from l con-
secutive window frames and outputs a single predic-
tion. We investigate its performance by running ex-
periments using values of 5, 10 and 15 for l and sim-
ilar combinations for w as previous experiments. To
compare the two proposed decision function a small
sample of results (Cases with DW Duration < 60s) is
presented in Table 5. The column DW Duration, in
the table refers to the timespan covered by the deci-
sion function f to make the prediction, these values
are computed considering overlap ratio of 75% be-
tween the consecutive window frames.
In order to demonstrate the advantage of using the de-
cision function, we also present the scores for individ-
ual window frame predictions, to have a fair compar-
ison for each row we compare the decision function
with the window frame configurations that is closest.
For example if w = 4s and DW Length = 15, DW Du-
ration will be 19 seconds, meaning the decision func-
tion effectively uses data from the past 19 seconds to
make a prediction. We compare this instance with the
predictions results for h
w
(classifier without decision
function) with the w = 20s, because it is the closest
window frame size to 19s that we have considered. In
the table we can see that in f
MS
results in between 4
to 9.3 % (6.6% in average) improvements over not us-
ing a decision function. f
MV
performs worse than f
MS
with average improvement of 3.58%.
6 DISCUSSION
If we consider how the data-set is annotated and the
signals we use for classification it is expected not to be
able to achieve excellent results for detecting distrac-
tions. This is because we mark a long stretch of driv-
ing as distracted driving, however although in that pe-
riod driver is engaged in a certain secondary task, this
engagement is not uniformly present throughout the
stretch, therefore we are inadvertently injecting noise
into our training data. In fact one could perform the
labeling more granularly and potentially improve the
results. The proposed methodology is quite flexible
and can be optimized for the intended applications,
generally one needs to find the right balance between
the quality of detection and delay in detection. For
example using GB classifier, w = 60, r = 0.75 and
DW = 15 (DW Duration of 285s) we achieve ROC
AUC of 98.7%. If we need a shorter the detection
time we get to ROC AUC of 92.7% with KNN clas-
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
184
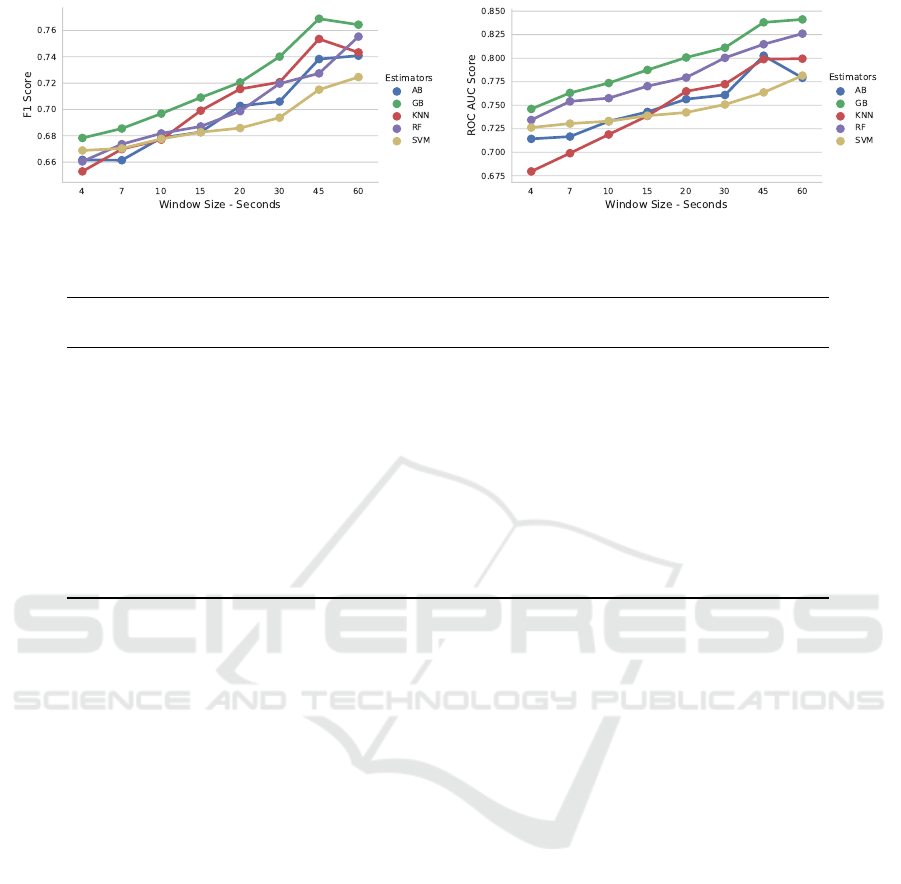
Figure 4: Estimators Performance Comparison - r = 75%.
Table 5: Decision Function Performance - Results are for KNN as classifier.
Win. Decision Window (DW) Closest Window Decision Function
Len. (s) DW Len. DW Duration (s) Len. (s) ROC AUC ROC AUC MS ROC AUC MV
4 5 9.00 10 0.718 0.748 (+4.07) 0.718 (-0.09)
4 10 14.00 15 0.738 0.780 (+5.61) 0.759 (+2.80)
4 15 19.00 20 0.764 0.799 (+4.60) 0.782 (+2.34)
7 5 15.75 15 0.738 0.774 (+4.84) 0.751 (+1.74)
7 10 24.50 20 0.764 0.812 (+6.28) 0.799 (+4.57)
7 15 33.25 30 0.772 0.836 (+8.29) 0.825 (+6.92)
10 5 22.50 20 0.764 0.801 (+4.83) 0.760 (-0.58)
10 10 35.00 30 0.772 0.844 (+9.38) 0.814 (+5.44)
10 15 47.50 45 0.798 0.871 (+9.05) 0.846 (+5.89)
15 5 33.75 30 0.772 0.822 (+6.48) 0.802 (+3.89)
15 10 52.50 45 0.798 0.867 (+8.59) 0.855 (+7.09)
20 5 45.00 45 0.798 0.855 (+7.12) 0.822 (+2.96)
sifier, w = 20, r = 0.75 and DW = 15 (DW Duration
of 95s). For DW durations less than 60 seconds the
results are presented on Table 5, for smaller DW du-
rations, ROC AUC decreases. We should also point
out that our evaluations are done not knowing any-
thing about the individual, in other words the model is
always trained on drivers that are not among the test
set. Tango and Botta (Tango and Botta, 2013) indi-
cate that they have gained about 20% improvement in
the performance when they trained a model for each
driver (Intra-subject). Another important factor is that
we do not use any intrusive signals, not tracking of the
driver’s head nor the cabin sound, only sensor data
from the car. Not only that, studies such as (W
¨
ollmer
et al., 2011) and (Tango and Botta, 2013) regardless
of intrusive sensors, they do use metrics that are not
readily available. Such as distance from the center of
the lane. Such information are one of the key metrics
influenced by the distracted driving. However here
our goal is to make a similar prediction without hav-
ing access to such information. With the current setup
we may not be able to address applications that re-
quire accurate spontaneous and momentarily distrac-
tion detection. Instead the system performs well at
detecting long lasting distractions, such as mobile-
phone conversations or conversations among the pas-
sengers. Moreover one can use such a system as a
way to characterize driver’s riskiness. It is crucial for
insurance, logistic and public transport companies, to
keep track of their customers or employees risky driv-
ing behavior. Such application is equally beneficial
for individuals who would like to keep track of their
driving quality. For example parents who are con-
cerned about safety of their teenagers, would like to
know whether or not their children is a risky driver.
7 CONCLUSIONS
In this paper, we have proposed a mechanism to de-
tect distracted driving based on non-intrusive vehicle
sensor data. In the proposed method 8 driving signals
are used. The data is collected, two types of statistical
and cepstral features are extracted in a sliding win-
dow process, next a classifier makes a prediction for
each window frame, and lastly, a decision function
takes the last l predictions and makes the final pre-
diction for the given window frames. We have evalu-
ated the subject independent performance of the pro-
posed mechanism using a driving data-set consisting
of 13 drivers. We analyzed the implications of chang-
ing the size of sliding window and its overlap ratio.
We have shown that the performance increases as the
window size and decision window size become larger.
Non-intrusive Distracted Driving Detection based on Driving Sensing Data
185

We have compared the performance of several classi-
fiers. The best results were achieved using GB classi-
fier w = 60,r = 0.75 and DW = 15 (DW Duration of
285s) which yields ROC AUC of 98.7%. Our results
show that even with poorly annotated data and only
use of vehicle sensor data it is possible to accurately
detect distracted driving events. In future work intra-
subject models should be evaluated. It will be also of
interest to see how the proposed mechanism performs
on a more granular dataset, with more accurate labels.
ACKNOWLEDGEMENTS
The authors would like to thank Dr. H
¨
useyn Abut
and VPALAB of Sabanci University for providing the
data-set used for this study.
REFERENCES
Abut, H., Erdo
˘
gan, H., Erc¸il, A., C¸
¨
ur
¨
ukl
¨
u, A. B., Koman,
H. C., Tas, F., Arguns¸ah, A.
¨
O., Akan, B., Karabalkan,
H., C¸
¨
okelek, E., et al. (2007). Data collection with”
uyanik”: too much pain; but gains are coming.
Berka, C., Levendowski, D. J., Lumicao, M. N., Yau,
A., Davis, G., Zivkovic, V. T., Olmstead, R. E.,
Tremoulet, P. D., and Craven, P. L. (2007). EEG Cor-
relates of Task Engagement and Mental Workload in
Vigilance, Learning, and Memory Tasks.
Dietterich, T. G. (2002). Machine learning for sequential
data: A review. In Joint IAPR International Work-
shops on Statistical Techniques in Pattern Recognition
(SPR) and Structural and Syntactic Pattern Recogni-
tion (SSPR), pages 15–30. Springer.
Dong, Y., Hu, Z., Uchimura, K., and Murayama, N. (2011).
Driver inattention monitoring system for intelligent
vehicles: A review. IEEE Transactions on Intelligent
Transportation Systems, 12(2):596–614.
Engstr
¨
om, J., Monk, C. A., Hanowski, R. J., Horrey, W. J.,
Lee, J. D., McGehee, D. V., Regan, M. a., Stevens, A.,
Traube, E., Tuukkanen, M., Victor, T., and Yang, D.
(2013). A Conceptual Framework and Taxonomy for
Understanding and Categorizing Driver Inattention.
Farneb
¨
ack, G. (2003). Two-Frame Motion Estimation
Based on Polynomial Expansion. Springer.
Fridman, L., Brown, D. E., Angell, W., Abdi
´
c, I., Reimer,
B., and Noh, H. Y. (2016). Automated synchro-
nization of driving data using vibration and steering
events. Pattern Recogn. Lett., 75(C):9–15.
Harbluk, J. L., Noy, Y. I., Trbovich, P. L., and Eizenman, M.
(2007). An on-road assessment of cognitive distrac-
tion: Impacts on drivers’ visual behavior and brak-
ing performance. Accident Analysis and Prevention,
39(2):372–379.
Jafarnejad, S., Castignani, G., and Engel, T. (2017). To-
wards a real-time driver identification mechanism
based on driving sensing data. In 20th Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC). IEEE.
Jin, L., Niu, Q., Hou, H., Xian, H., Wang, Y., and Shi, D.
(2012). Driver cognitive distraction detection using
driving performance measures. Discrete Dynamics in
Nature and Society.
Klauer, S. G., Guo, F., Sudweeks, J., and Dingus, T. A.
(2010). An analysis of driver inattention using a case-
crossover approach on 100-car data. Technical report.
Lee, J., Young, K., and Regan, M. (2009). Defining driver
distraction, pages 31 – 40. CRC Press, Australia.
Liang, Y. and Lee, J. D. (2010). Combining cognitive and
visual distraction: Less than the sum of its parts. Ac-
cident Analysis and Prevention, 42(3):881–890.
Miyajima, C., Kusakawa, T., Nishino, T., Kitaoka, N., Itou,
K., and Takeda, K. (2009). On-going data collection
of driving behavior signals. In In-Vehicle Corpus and
Signal Processing for Driver Behavior. Springer.
¨
Ozt
¨
urk, E. and Erzin, E. (2012). Driver Status Identification
from Driving Behavior Signals, pages 31–55. Springer
NY, New York, NY.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Rantanen, E. M. and Goldberg, J. H. (1999). The effect
of mental workload on the visual field size and shape.
Ergonomics, 42(6):816–834.
Savitzky, A. Golay, M. J. E. (1964). Smoothing and dif-
ferentiation of data by simplified least squares proce-
dures. Anal. Chem., 36.
Tango, F. and Botta, M. (2013). Real-time detection system
of driver distraction using machine learning. IEEE
Transactions on Intelligent Transportation Systems,
14(2):894–905.
Wesley, A., Hoffman Hall, P. G., Shastri, D., and Pavlidis,
I. (2010). A Novel Method to Monitor Driver’s Dis-
tractions CHI 2010: Work-in-Progress.
W
¨
ollmer, M., Blaschke, C., Schindl, T., Schuller, B.,
F
¨
arber, B., Mayer, S., and Trefflich, B. (2011). Online
Driver Distraction Detection Using Long Short-Term
Memory. IEEE Transactions on Intelligent Trans-
portation Systems, 12(2).
Zhou, H., Itoh, M., and Inagaki, T. (2008). Influence of cog-
nitively distracting activity on driver’s eye movement
during preparation of changing lanes. Proceedings of
the SICE Annual Conference, pages 866–871.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
186
