
Generation of Stereoscopic Interactive Learning Objects True to the
Original Object
Diogo Roberto Olsen, Fl
´
avio de Almeida e Silva, Lucas Murbach Pierin, Aramis Hornung Moraes
and Edson Jos
´
e Rodrigues Justino
Programa de P
´
os-graduac¸
˜
ao em Inform
´
atica - PPGIa, Pontif
´
ıcia Universidade Cat
´
olica do Paran
´
a - PUCPR,
Keywords:
Learning Objects, Stereoscopy, Immersive Environments, Virtual Reality, Multidisciplinarity.
Abstract:
Learning objects are used in many knowledge areas and may be aligned with technologies such as stereoscopy
and ultra-high definition, instigating interactions and arousing interest in educational environments. Gener-
ating such objects from real pieces is a challenge because it requires computational resources to maintain
quality and fidelity. Another challenge is to port these objects to different devices such as immersive theater,
cell phones, virtual reality glasses, and televisions/projectors. Hence, we developed a framework capable of
generating learning objects from real pieces with quality and fidelity of form, color, and texture. This article
focuses on the generation of learning objects for these devices.
1 INTRODUCTION
In a teaching-learning process, the teacher can deploy
elements that aim to arouse the students’ interest re-
gardless of their nature such as rocks, leaves, animals,
videos, images, etc. These elements enrich the pro-
cess by putting the students in contact with objects
that bring learning closer to their reality.
However, not all of these elements are easily ac-
cessible to the teacher, although representations may
be used to introduce them to the learners. Some of
these elements may be seen as Learning Objects (LO),
which, according to the Learning Technology Stan-
dards Committee (LTSC-IEEE), ”Learning Objects
are defined here as any entity, digital or non-digital,
which can be used, re-used or referenced during tech-
nology supported learning”
1
. However, there is no
consensus on this definition, as seen in (Wiley, 2002).
Interactivity, high resolution, stereoscopy, aug-
mented reality and three-dimensional projection are
present in movie theaters, advertising, televisions and
cell phones. These techniques are available and may
be used to support the teaching-learning process as
a way of presenting and manipulating LOs. LOs
need environments and repositories to be shared, as
discussed in (Santiago and Raabe, 2010; Freire and
Fern
´
andez-Manj
´
on, 2016). There are LOs (Sinclair
1
LTSC - http://grouper.ieee.org/groups/ltsc/wg12/
et al., 2013) that can be used multidisciplinarily, some
can be customized(M
´
endez et al., 2016; Garrido and
Onaindia, 2013). LOs can be evaluated by indicators
themselves (Sanz-Rodriguez et al., 2010).
In order to create LOs compatible with these tech-
niques, we developed a framework composed of a
Full Frame Semi-spherical Scanner(F2S2) and pro-
cessing software. The F2S2 digitizes, through pho-
tography, all the angles of an object, forming a
hemisphere with these images; hence the term semi-
spherical (Section 2). The terms full frame refer to
the fact that each image represents the whole object
for that viewing angle, unlike other technologies, such
as the laser scanner that digitizes the object into parts
to later reconstruct a given view. The LO consists
of photos and navigation software, which allows for
interactive visualization, i.e., you can visualize and
manipulate the object from any desired angle. You
can associate points of interest with hypermedia. For
example, in a History class, one could pick up an ar-
chaeological object that, by its rarity, cannot be ma-
nipulated by the students. This piece can be scanned
for Ultra High Definition (UHD) presentation, allow-
ing for magnification and movement, showing details
that even the naked eye would not see. Explanatory
content (hypermedia) may be added at the teacher’s
points of interest to enrich knowledge. Figure 1 shows
an example of a LO in UHD and with hypermedia.
Characteristic for LOs generated by F2S2 is that
Roberto Olsen, D., de Almeida e Silva, F., Murbach Pierin, L., Hornung Moraes, A. and José Rodrigues Justino, E.
Generation of Stereoscopic Interactive Learning Objects True to the Original Object.
DOI: 10.5220/0006701402590266
In Proceedings of the 10th International Conference on Computer Supported Education (CSEDU 2018), pages 259-266
ISBN: 978-989-758-291-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
259
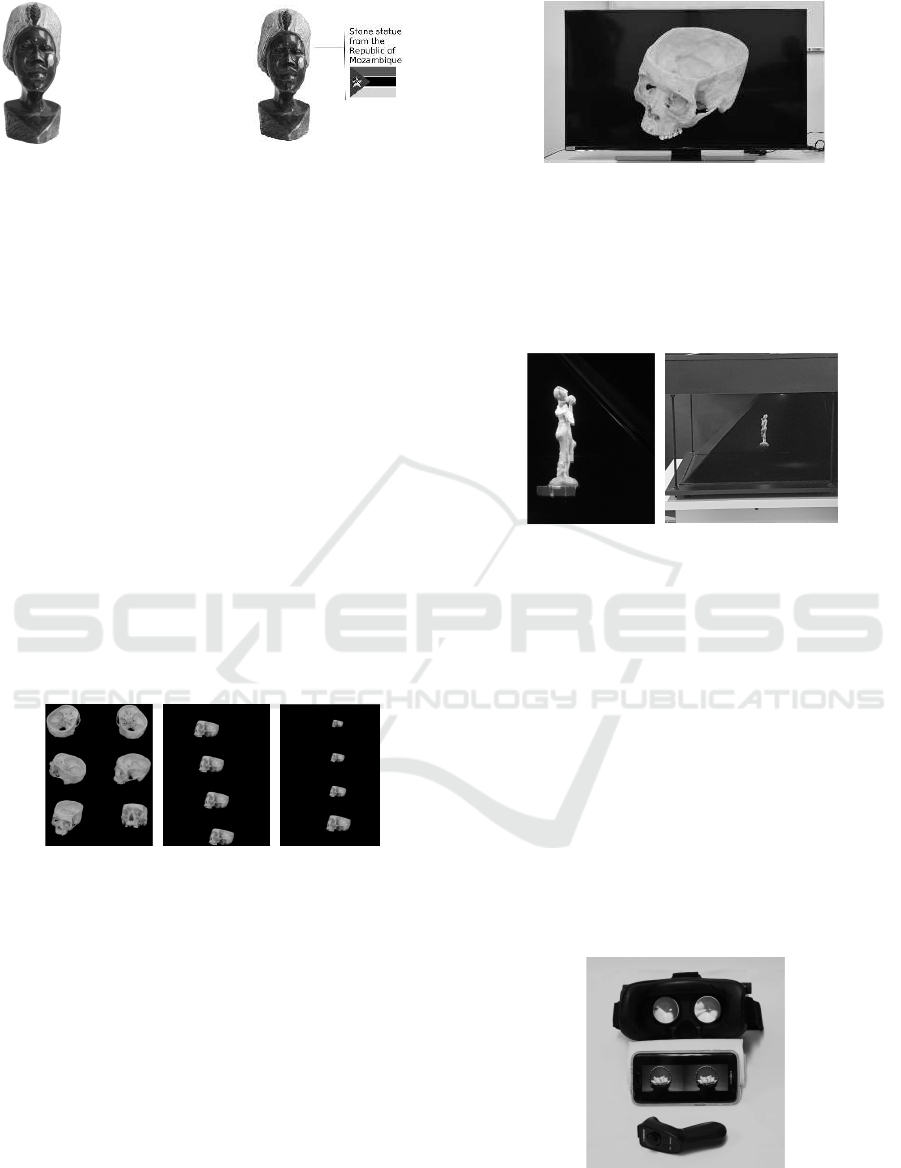
(a) (b)
Figure 1: LO: (a) Original, (b) with Hypermedia content.
they can be acquired and reproduced in UHD, which,
as mentioned, enables enlargement without loss of
image quality, allowing the visualization of details
as well as maintaining the fidelity of shape, color,
and texture of the original object. LOs may also be
stereoscopic, allowing visualization with the notion
of depth. The stereoscopy is formed with stereoscopic
lenses or by the difference of angles in the photos ob-
tained by the F2S2, as will be seen in section 2.
Interactivity, as seen in (Koukopoulos and
Koukopoulos, 2017; Hung et al., 2017), allows the
object to be manipulated in three ways: scaling (as al-
ready mentioned), rotation and translation. Rotation
allows you to change the viewing point to any desired
angle. Translation allows a displacement of the image
within the projection, for example, horizontal, verti-
cal, and diagonal. Figure 2 shows the three compo-
nents of interactivity. In this interactive process, it is
possible to select points of interest and add a presen-
tation of contents, as seen in Figure 1.
(a) (b) (c)
Figure 2: Interactivity components: (a) rotation, (b) trans-
lation, and (c) scaling.
The content may be shown in different environ-
ments, such as a television (TV) or multimedia pro-
jector, which are common access in schools and uni-
versities and bring the benefit of being stereoscopic
and/or 4K, and UHD, respectively. The characteris-
tics of these environments allow visualization with the
original quality. In addition, interactivity may be pro-
vided using input devices. Figure 3 shows an example
of an LO shown on TV.
An environment that is currently gaining promi-
nence, especially in advertising, is the Holographic
Pyramid (Sidharta et al., 2007; Rossi, 2015). Its oper-
ation consists of a monitor/TV/projector that projects
the image on a screen, usually made of glass, causing
Figure 3: LO on TV.
the sensation of three-dimensionality. The name pyra-
mid does not fit all forms of this environment because
in some cases it shows only one face for visualization,
in others, there are three or four faces. Figure 4 shows
an LO in the holographic pyramid.
(a) (b)
Figure 4: LO in a Holographic Pyramid: (a) Lateral Projec-
tion, (b) Pyramid.
For teaching-learning purposes using the objects
generated by F2S2, the pyramid can be interactive, as
is the case of the TV. Besides presenting tridimension-
ality, each face of the pyramid offers a different point
of view.
Virtual reality (VR) glasses and mobile phones
(Hassan et al., 2013) may also be used in teaching-
learning since they are naturally stereoscopic as they
project an image in each eye. An advantage of RV
glasses are features such as the accelerometer and the
gyroscope, which allow the user’s movement to be
identified and applied to the LO, giving a spatial no-
tion. Figure 5 shows the RV Glasses and an LO on a
mobile phone.
Figure 5: LO on VR glasses.
Another environment that offers interactive and
stereoscopic features is the immersive theater, like
CSEDU 2018 - 10th International Conference on Computer Supported Education
260
Fulldome (Lantz, 2007). In this immersive environ-
ment, the projection occurs through different projec-
tors, some of which are polarized to the right eye and
others to the left eye. Thus, stereoscopic images are
formed with the aid of glasses. In addition, there is the
possibility of interaction with controls present in each
chair, so that the teacher can launch questions or chal-
lenges and the student responds directly my means of
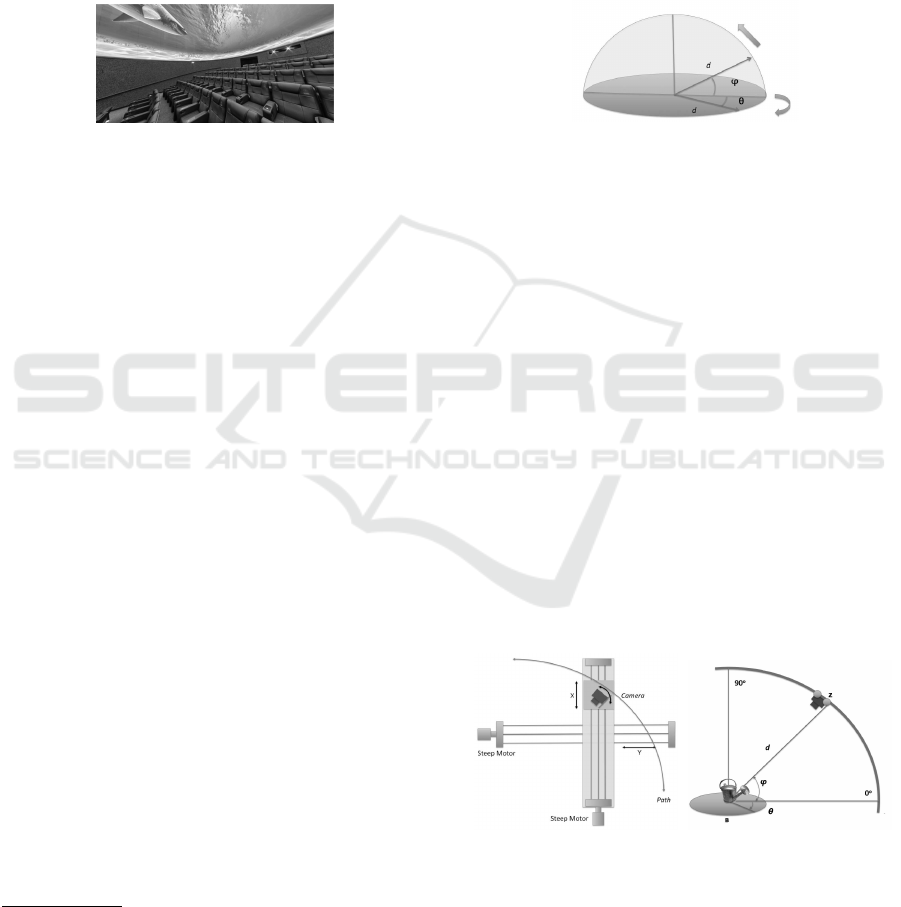
these controls. Figure 6 shows the Immersive Theater
inside
2
.
Figure 6: Inside the Immersive Theater.
The aim of this article is to present examples of
LOs generated by F2S2 and the application possibil-
ities in different knowledge areas. So the remaining
part of the article is divided into three sections: in sec-
tion 2, the methodology, in section 3, the applications,
and in section 4, the conclusions.
2 METHODS
Three phases are stipulated for the generation of ob-
jects: acquisition, processing, and visualization. In
the acquisition process, the F2S2 is prepared, choos-
ing the background color, setting the camera, setting
the number of Frames and Streams, and lighting. In
the processing stage, lens correction, photo context
reduction, segmentation, and the organization of the
Streams are accomplished. Finally, the visualization
stage consists of adapting the Streams to the desired
projection formats and the configuration of the nav-
igation software. Next, these three phases are ex-
plained in more detail, starting with the acquisition.
2.1 Aquisition
The F2S2 is controlled by a RaspBerry PI
3
and an
Arduino
4
, in addition to other electronic components
and motors. A communication protocol has been de-
veloped that transmits instructions for moving and
controlling the camera. The protocol is loaded into
these controllers. The object to be scanned is placed
2
Screenshot of Digital Arena
http://www.ftddigitalarena.com.br/wp-content/360tour/
index.html
3
https://www.raspberrypi.org/
4
https://www.arduino.cc/
in an infinite background that may be covered with
different materials and colors in order to facilitate seg-
mentation (as described in section 2.2). The camera
and lighting settings are set manually as well as the
background color, which depends on the object. This
is the only manual step in the entire process.
Acquisitions occur by moving a camera over an
arc-shaped path based on the size of the object. Figure
7 shows the semi-sphere formed by the arc during the
scanning process.
Figure 7: Semi-spherical movement.
The angular variation θ represents the object’s ro-
tation over its own axis and ϕ represents the camera’s
angle relative to the object. The variable d represents
the distance between the camera and the center of the
object, that is, the radius of the semi-sphere, which is
constant throughout the movement.
To perform the movement, the F2S2 uses four
degrees of freedom, of which two are the X and
Y − axes, responsible for the arc displacement of the
camera. These axes start from an initial position de-
termined as angle zero (ϕ), traversing a path until
reaching its endpoint: the angle of ninety degrees rel-
ative to the base of the object.
The X − axis is responsible for the vertical move-
ment of the arm that supports the camera. The Y −
axis horizontally moves the arm of the X −axis, keep-
ing the camera in the arc motion at a distance d from
the object. The other two degrees of freedom are the
Z and B − axes, represented respectively by ϕ and θ
in Figure 7. Figure 8 shows these axes.
(a) (b)
Figure 8: Axes: (a) X and Y-axes, (b) Z and B-axes.
The image acquisition process starts with all axes
set to the zero-angle position. The object sits on a
turntable in the center of the B−axis. The acquisition
takes place through up to 360 shots determined by the
angle (θ) of the turn of the dish, that is, one can take a
Generation of Stereoscopic Interactive Learning Objects True to the Original Object
261

photo for each degree. The set of photos for the same
camera position is called Stream and each photo is
called Frame.
When the Stream is acquired at a certain angle,
the camera is repositioned one degree up in the arc,
i.e., the X and Y − axes are moved. In addition, to
keep the object in the focal center of the camera, the
Z − axis is moved to an angle determined by ϕ. The
maximum of Streams that can be acquired is ninety,
i.e., a Stream for each degree in the arc. Hence, it is
possible to acquire 360 Frames per Stream and ninety
Streams, giving a total of 32,400 photos, represent-
ing each possible view degree by degree of the object.
Figure 9 shows two views of F2S2.
(a) (b)
Figure 9: Views of F2S2: (a) lateral view, (b) internal view.
It takes about 30 hours to complete the acquisition
of an object.
2.2 Processing
Camera lenses cause deformation in the acquired im-
ages, which is inherent to all lenses and cameras. De-
spite the little importance of it in amateur photos, in
professional/scientific processes, it requires correc-
tion. There is specialized software that can perform
the process automatically on a set of images from
a configuration chosen by the user. An example of
free software that accomplishes this job is Darktable
5
.
Thus, processing starts with correcting deformities in
all Frames.
Depending on the size and shape of the object,
it may be impossible to frame it so that it occupies
the entire space in the picture. To reduce the amount
of space required for disk storage and eliminate un-
wanted parts, such as parts of the scanner that may
appear in the photos, context reduction is applied by
selecting a region where the object appears integrally
in all Frames. The rest of the image is discarded. Fig-
ure 10(a) shows a complete image, and Figure 10(b)
shows the same image with context reduction.
The segmentation step (Pedro et al., 2013;
Chauhan et al., 2014)removes the background of the
5
www.darktable.org
(a) (b)
Figure 10: Context Reduction: (a) original image, (b) image
with context reduction.
image, keeping only the object of interest. There is
no ideal solution in the literature for the segmentation
problem since each image has its own characteristics.
In addition, the acquisition generates a high volume
of images. Hence, the process has to be automated.
In order to bypass these problems, we have
tested several algorithms, such as Support Vector
Machine (SVM)(Huang et al., 2012; Tsai et al.,
2006), K-means (Xu et al., 2017), K-Nearest Neigh-
bor (KNN)(Xu and Wunsch, 2005), Sobel (Jo and
Lee, 2012), Canny (Chen et al., 2014), Graph Cut
(Boykov and Jolly, 2001), and Watershed (Tian and
Yu, 2016). The algorithm with the best results, con-
sidering processing time and quality, was the SVM.
Figure 11 shows the result of a segmentation per-
formed on a Darth Vader doll on a blue background.
(a) (b)
Figure 11: Segmentation: (a) Image with context reduction,
(b) Segmented image.
The Streams are organized during the segmenta-
tion of the images when they receive a filename con-
taining the identification of the Stream to which they
belong and the Frame; for instance, the first image of
the first Stream is named S001F0001.
The equipment used for the job was an Avell Full-
range W1713 Pro CL notebook with an Intel Core I7-
4910MQ 2.9GHz processor, 32GB RAM, NVIDIA
Quadro K3100M and Intel HD Graphics 4600 graph-
ics card, and Windows 10 PRO 64bits operating sys-
tem. The Streams context reduction, segmentation,
and organization system was developed using Matlab
CSEDU 2018 - 10th International Conference on Computer Supported Education
262

Toolbox
6
v.R2015b, and OpenCV-python 3.0 v.3.6.2
of Python
7
.
The processing time for a set of 32,400 images
was 12 hours and 30 minutes, occupying 1.2 Giga-
bytes of memory, which is acceptable considering
that the acquisition time is longer than the processing
time.
2.3 Visualization
As each device has its specificity, it is necessary to
prepare the images for each of them. Stereoscopic
devices have their own format for visualization, such
as anaglyph, polarized and stereo pair, among others
(Oh et al., 2017; Liu et al., 2017; Lei et al., 2017).
The anaglyph consists of two superimposed images of
the same object with different color patterns - usually
red and blue or red and green - each pattern having a
small displacement with respect to one another. Spe-
cial eyeglasses are used to filter each pattern for one
eye. The notion of depth is generated by the differ-
ences in patterns and the small displacement.
Polarized stereoscopy consists of two overlapping
images, but it requires the use of a pair of glasses in
which the lenses are prepared to filter the polarized
light so that each eye receives each of the images.
The stereoscopic pair consists of two images, one of
which is horizontally polarized and the other verti-
cally. Thus, the device emits each image in a different
polarization but simultaneously. When the glasses re-
ceive these images, the lenses filter each one for each
eye, causing the brain to interpret the image with a
notion of depth.
F2S2 is able to acquire stereoscopic images using
stereoscopic lenses developed by the manufacturers
of the cameras used, but it is also capable of generat-
ing stereoscopy through lenses without this function-
ality. For the latter, the formation of stereoscopic vi-
sion occurs by joining the acquired images at different
angles, for example, one image at angle zero and an-
other at the angle of 4 degrees from zero. This value
is related to the distance between the camera and the
object, which, in turn, is related to Parallax and Dis-
parity, as can be seen in (Kramida, 2016).
The Stereo Pair, on the other hand, is based on two
images, each of which is displayed for only one eye,
which has the same effect as polarized stereoscopy.
The technique of the Stereo Pair, which has been
known since the mid-nineteenth century, consists of
6
Matlab Imaging Processing Toolbox:
https://www.mathworks.com/products/image.html?s tid=
srchtitle
7
OpenCV-Python: https://pypi.python.org/pypi/opencv-
python
placing side by side two images acquired at different
angles, as cited above.
In the case of the images generated by the F2S2,
they require specific processing to transform them
into stereoscopic images. This processing is the junc-
tion of the images of certain angles related to the par-
allax and disparity, the average distance between the
retinas, which varies from 4 to 7 centimeter.
As far as navigation is concerned, two ways have
been developed: if the device has enough memory
to support all images, they are loaded into memory.
The change in visualization takes place according to
the interaction of the user. If he presses the left or
right arrow key, for example, the picture changes to
the Frame immediately to the right or left of the cur-
rent frame. This change of Frames is related to the
change in the angles of axis B. Changes up or down,
using the respective arrow keys, imply changes in the
Streams, which relates to the angles in the arc as de-
fined in subsection 2.1.
The same process occurs when using VR glasses,
but instead of pressing keys, it reads the accelerome-
ter and gyro signals to carry out the change of Frames
or Streams. In addition, joysticks may be used, which
allow interaction by pressing their buttons.
The interactions also allow zooming in and out,
giving the sensation of approaching or distancing
from the object, and translation, i.e., the displacement
of the object in the projection.
However, if there is not enough memory to load
all the images, navigation takes place through a mov-
ing windows. It works by loading a subset of the
images closest to the current view. When moving
within the window, which means to change Frame or
Stream, the closest images are found, unloading those
Frames that, according to the new position, have be-
come more distant and loading the new closer ones.
The size of the windows, that is, the number
of Frames loaded, is configurable depending on the
equipment (memory and processor) used. Not all
equipment will be able to run the browser, given the
size and quantity of images. Navigation itself occurs
in a similar way to that described in the first case.
3 APPLICATIONS
In this section, we present some possibilities of using
the LOs in the Immersive Theater (Fulldome), where
we used human skulls to study anatomy, the Pyramid,
where we used a bronze bust to study the arts, Vir-
tual Reality Glasses, using the inside of a car (starter
motor) for studies in the area of mechanics, and the
TV / Projector, where we used a replica of a car for
Generation of Stereoscopic Interactive Learning Objects True to the Original Object
263
the study in design. This section has been divided
into subsections that address each environment with
its LO
8
.
3.1 Immersive Theater - LO Skulls
The immersive theater used has four polarized projec-
tors to generate stereoscopy, with each pair projecting
an image for each eye. The chairs are equipped with
controls that allow interaction. The exhibition room
has 120 seats and seats for wheelchair users. As the
projection screen format is semi-spherical and has a
diameter of 14 meters, the viewers should be slightly
inclined to have a full view.
Two human skulls, one with the skull box open
and the other with it closed, were made available by
the medical course. They were digitalized obtaining
two LOs in UHD, which allows the visualization of
anatomical details. The LOs present fidelity of shape,
color, and texture to the original pieces. There are,
of course, images of skulls created in 3D drawing
and modeling programs to which a texturing has been
applied; this is called rendering. In comparison to
the O2 generated by F2S2, however, these rendered
pieces do not have the three fidelity characteristics,
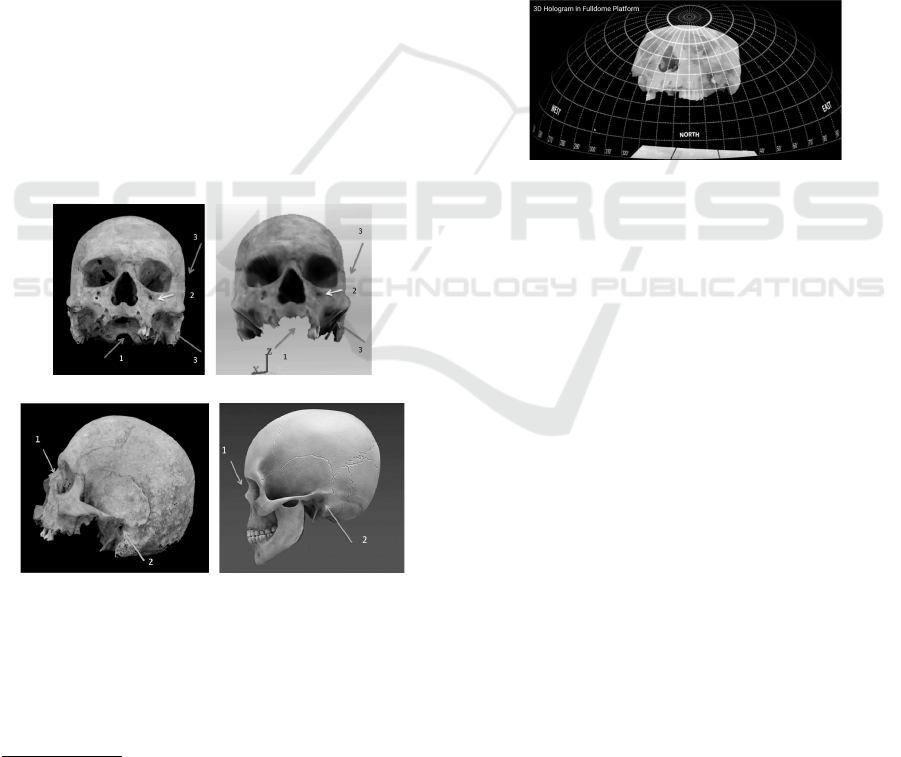
which can be seen in Figure 12.
(a) (b)
(c) (d)
Figure 12: Comparison between Skulls: (a) Skull generated
by F2S2, (b) Skull generated by 123D, (c) Skull Generated
by F2S2, and (d) Synthetic Skull.
Figures 12(a) and 12(b) show the difference be-
tween an image generated by F2S2 and one generated
by the AutoDesk 123D Catch
9
software. The latter
8
We present the videos of the LOs in project’s
channel in youtube https://www.youtube.com/channel/
UCXEFzyZGrGlLANNrCawNgWQ - Anonymous.
9
https://www.autodesk.com.br/
presents fidelity problems in the rendering process,
which does not occur in the LO generated by F2S2.
Figures 14 (c) and 14 (d) show the difference between
the LO generated by F2S2 and a synthetic 3D model.
As can be seen in Figure 12(d), the synthetic model
does not represent the ear hole.
The skull with the open skull box was used for
the generation of an LO for the immersive theater,
with the main objective being the anatomical study in
the medical area; however, the same LO may be used
in different courses (Dragon et al., 2013) such as an-
thropology, physiotherapy, nursing, and even in high
school. The main advantage, in courses that do not
require manipulating corpses in laboratories, which is
unhealthy, is that the fidelity allows a detailed visual-
ization of the piece. Figure 13 shows the preparation
of the LO for immersive theater projection.
Figure 13: LO immersive theater preparation.
3.2 Pyramid - Bronze Bust
The pyramid used has three faces, made of glass for
a better reflection of the object. It is 1.05 meters at
the base, 48 cm high and 67 cm deep. For this ex-
periment, we used a bronze bust. The purpose of this
LO is its use in areas such as arts, history and even to
create a virtual museum. This LO allows the study of
bronze sculpture techniques, the analysis of the char-
acteristics of the piece (art history), and even the study
of the character represented in the piece (history).
This LO projected on the pyramid conveys the
feeling that the piece is physically inside it, but it is
only a visual representation. There is also the feel-
ing of three-dimensionality. The teacher can place
points of interest that he can access through keyboard,
mouse or joystick interaction. Figure 14 shows the
pyramid with the bronze bust.
3.3 VR Glasses - Starter Motor
Another relevant purpose for F2S2 is the generation
of LOs for inspection. In this context, a starter mo-
tor, a piece that starts the rotation process of the car’s
engine, was used for the LO. The inspection process
can also be performed on other mechanical pieces or
on electronic equipment and components.
CSEDU 2018 - 10th International Conference on Computer Supported Education
264

Figure 14: LO Pyramid preparation.
We used RV spectacles for the presentation of this
LO. The characteristic of these glasses is that they are
intrinsically stereoscopic, since there is a division in
the device itself and, consequently, it separates an im-
age for each eye. The advantage is that, as it uses the
accelerometer and gyroscope, the visualization of the
LO is natural, that is, it does not require keyboard and
mouse for interaction. One is free to move around in
the environment without losing the focus of the LO.
A disadvantage is the reduction of the quality and
quantity of images, since cell phones, for example,
have limitations in computational capacity. Although
there are fixed-screen glasses with a cable connec-
tion to a computer, this disadvantages the user’s free
movement, limited by the length of the cable. Figure
15 shows the use of LO in RV glasses.
Figure 15: LO on VR Glasses.
3.4 TV/Projector - Miniature Replica of
a Car
The TV/projector environment is the one that has
greater availability of use since schools and univer-
sities have easy access. For this experiment, a replica
of a Corvette car was chosen, aiming at studying its
design, which may be of interest to industrial design
and design courses, for instance.
The advantage of the LO on TVs is that TVs may
have a UHD resolution of 4K and 8K, allowing a
detailed view of the images provided as the images
themselves also have a 4K and 8K definition. An-
other feature of the TV is that it can be stereoscopic,
using the technique of polarized stereoscopy. Figure
16 shows the LO displayed on a 4K TV.
Figure 16: LO on a 4K TV.
4 CONCLUSIONS
The use of F2S2 in educational environments insti-
gates multidisciplinarity and interdisciplinarity since
the same Learning Object may be reused in different
areas of knowledge and addressed in different ways in
the same area.
An example of this is the Bronze Bust, which may
be used in History for the study of the character or the
analysis of the artistic movement at the time in which
the piece was created. It may also serve different dis-
ciplines, such as those in the arts course.
Thus, we have shown the feasibility of using the
learning objects generated by F2S2, even as a way to
promote interaction and dynamism in educational en-
vironments. This is mainly due to the approximation
of technologies that are currently present in areas such
as film and advertising. We believe that these tech-
nologies may arouse interest, since people also have
contact with some of these technologies in their daily
lives, outside the school environment.
The comprehensiveness of the learning objects
generated by F2S2 goes beyond disciplinary bound-
aries and knowledge areas since the same object may
be used in both the human and the exact sciences.
In the future, we plan to accomplish the scanning
of other objects and make the object bases as well as
the visualization software available. We also aim to
evaluate the learning objects with students, in order
to verify interaction and aroused interest.
ACKNOWLEDGEMENTS
We gratefully acknowledge the support of IFPR,
UTFPR, CAPES and Nvidia GPU Grant Program for
the donation of the TITAN XP GPU.
Generation of Stereoscopic Interactive Learning Objects True to the Original Object
265

REFERENCES
Boykov, Y. Y. and Jolly, M. P. (2001). Interactive graph
cuts for optimal boundary amp; region segmentation
of objects in n-d images. In Proceedings Eighth IEEE
International Conference on Computer Vision. ICCV
2001, volume 1, pages 105–112 vol.1.
Chauhan, A. S., Silakari, S., and Dixit, M. (2014). Image
segmentation methods: A survey approach. In 2014
Fourth International Conference on Communication
Systems and Network Technologies, pages 929–933.
Chen, H., Ding, H., He, X., and Zhuang, H. (2014). Color
image segmentation based on seeded region growing
with canny edge detection. In 12th International Con-
ference on Signal Processing (ICSP), pages 683–686.
Dragon, T., Mavrikis, M., McLaren, B. M., Harrer, A.,
Kynigos, C., Wegerif, R., and Yang, Y. (2013).
Metafora: A web-based platform for learning to learn
together in science and mathematics. IEEE Transac-
tions on Learning Technologies, 6(3):197–207.
Freire, M. and Fern
´
andez-Manj
´
on, B. (2016). Metadata for
serious games in learning object repositories. IEEE
Revista Iberoamericana de Tecnologias del Apren-
dizaje, 11(2):95–100.
Garrido, A. and Onaindia, E. (2013). Assembling learning
objects for personalized learning: An ai planning per-
spective. IEEE Intelligent Systems, 28(2):64–73.
Hassan, H., Martinez-Rubio, J. M., Perles, A., Capella,
J. V., Dominguez, C., and Albaladejo, J. (2013).
Smartphone-based industrial informatics projects and
laboratories. IEEE Transactions on Industrial Infor-
matics, 9(1):557–566.
Huang, G. B., Zhou, H., Ding, X., and Zhang, R. (2012).
Extreme learning machine for regression and mul-
ticlass classification. IEEE Transactions on Sys-
tems, Man, and Cybernetics, Part B (Cybernetics),
42(2):513–529.
Hung, I.-C., Kinshuk, and Chen, N.-S. (2017). Embodied
interactive video lectures for improving learning com-
prehension and retention. Computers and Education.
Jo, J. H. and Lee, S. G. (2012). Sobel mask operations
using shared memory in cuda environment. In 2012
6th International Conference on New Trends in In-
formation Science, Service Science and Data Mining
(ISSDM2012), pages 289–292.
Koukopoulos, Z. and Koukopoulos, D. (2017). Integrat-
ing educational theories into a feasible digital envi-
ronment. Applied Computing and Informatics.
Kramida, G. (2016). Resolving the vergence-
accommodation conflict in head-mounted displays.
IEEE Transactions on Visualization and Computer
Graphics, 22(7):1912–1931.
Lantz, E. (2007). A survey of large-scale immersive dis-
plays. In Proceedings of the 2007 Workshop on
Emerging Displays Technologies: Images and Be-
yond: The Future of Displays and Interacton, EDT
’07, New York, NY, USA. ACM.
Lei, J., Wu, M., Zhang, C., Wu, F., Ling, N., and Hou,
C. (2017). Depth-preserving stereo image retargeting
based on pixel fusion. IEEE Transactions on Multi-
media, 19(7):1442–1453.
Liu, Z., Yang, C., Rho, S., Liu, S., and Jiang, F. (2017).
Structured entropy of primitive: big data-based stereo-
scopic image quality assessment. IET Image Process-
ing, 11(10):854–860.
M
´
endez, N. D. D., Morales, V. T., and Vicari, R. M.
(2016). Learning object metadata mapping with
learning styles as a strategy for improving usabil-
ity of educational resource repositories. IEEE Re-
vista Iberoamericana de Tecnologias del Aprendizaje,
11(2):101–106.
Oh, H., Kim, J., Kim, J., Kim, T., Lee, S., and Bovik, A. C.
(2017). Enhancement of visual comfort and sense of
presence on stereoscopic 3d images. IEEE Transac-
tions on Image Processing, 26(8):3789–3801.
Pedro, R. W. D., Nunes, F. L. S., and Machado-Lima, A.
(2013). Using grammars for pattern recognition in
images: A systematic review. ACM Comput. Surv.,
46(2):26:1–26:34.
Rossi, D. (2015). A hand-held 3d-printed box projector
study for a souvenir from a mixed-reality experience.
In 2015 Digital Heritage, volume 1, pages 313–316.
Santiago, R. and Raabe, A. (2010). Architecture for learn-
ing objects sharing among learning institutions 2014
lop2p. IEEE Transactions on Learning Technologies,
3(2):91–95.
Sanz-Rodriguez, J., Dodero, J. M. M., and Sanchez-Alonso,
S. (2010). Ranking learning objects through integra-
tion of different quality indicators. IEEE Transactions
on Learning Technologies, 3(4):358–363.
Sidharta, R., Hiyama, A., Tanikawa, T., and Hirose, M.
(2007). Volumetric display for augmented reality.
In 17th International Conference on Artificial Reality
and Telexistence (ICAT 2007), pages 55–62.
Sinclair, J., Joy, M., Yau, J. Y.-K., and Hagan, S. (2013).
A practice-oriented review of learning objects. IEEE
Transactions on Learning Technologies, 6(2):177–
192.
Tian, X. and Yu, W. (2016). Color image segmentation
based on watershed transform and feature clustering.
In 2016 IEEE Advanced Information Management,
Communicates, Electronic and Automation Control
Conference (IMCEC), pages 1830–1833.
Tsai, C.-F., McGarry, K., and Tait, J. (2006). Claire: A mod-
ular support vector image indexing and classification
system. ACM Trans. Inf. Syst., 24(3):353–379.
Wiley, D. A. (2002). The instructional use of learn-
ing objects: Online version. http://www.test.org/doe/
acessed in 2017/10/15.
Xu, J., Han, J., Nie, F., and Li, X. (2017). Re-weighted
discriminatively embedded k -means for multi-view
clustering. IEEE Transactions on Image Processing,
26(6):3016–3027.
Xu, R. and Wunsch, D. (2005). Survey of clustering al-
gorithms. IEEE Transactions on Neural Networks,
16(3):645–678.
CSEDU 2018 - 10th International Conference on Computer Supported Education
266
