
Adaptive Decision Making based on Temporal Information Dynamics
Tobias Meuser, Martin Wende, Patrick Lieser, Bj
¨
orn Richerzhagen and Ralf Steinmetz
Multimedia Communications Lab, Technische Universitaet Darmstadt, Germany
Keywords:
Decision-making, Distributed, Quality of Information, Information Lifetime, Information Accuracy.
Abstract:
To increase road safety and efficiency, connected vehicles rely on the exchange of information. On each
vehicle, a decision-making algorithm processes the received information and determines the actions that are to
be taken. State-of-the-art decision approaches focus on static information and ignore the temporal dynamics
of the environment, which is characterized by high change rates in a vehicular scenario. Hence, they keep
outdated information longer than necessary and miss optimization potential. To address this problem, we
propose a quality of information (QoI) weight based on a Hidden Markov Model for each information type,
e.g., a road congestion state. Using this weight in the decision process allows us to combine detection accuracy
of the sensor and the information lifetime in the decision-making, and, consequently, adapt to environmental
changes significantly faster. We evaluate our approach for the scenario of traffic jam detection and avoidance,
showing that it reduces the costs of false decisions by up to 25% compared to existing approaches.
1 INTRODUCTION
In recent years, vehicles have become increasingly
connected. Consequently, an increasing number of
assistance functions relies on information that is
provided by other vehicles, e.g., intelligent route
planning. With ongoing research towards autono-
mous vehicles, the amount of shared information and
functions relying on this information is expected to
grow.
However, as the information is sensed by other
vehicles with their onboard sensors, its quality can
vary significantly. Furthermore, information received
from multiple vehicles can be contradicting or even
wrong. In a conventional vehicle with a human dri-
ver, the driver validates and rates information intuiti-
vely and makes a decision based on prior knowledge.
In comparison to that, autonomous and partly autono-
mous vehicles lack human intuition for information
rating and decision-making. Hence, analytical met-
hods need to be developed to make decisions in light
of ambiguous or even contradictory information.
Assuming that the majority of information is cor-
rect, vehicles can use approaches that rely on ma-
jority voting with simple static thresholds (Kakkas-
ageri and Manvi, 2014). Depending on the selected
threshold, these approaches adapt either slowly ma-
king them unsuitable for dynamic conditions or fast,
making them vulnerable to false information. Howe-
ver, as information about road and traffic conditions
changes frequently—and measurements are not 100%
reliable—this threshold needs to be adapted for an op-
timal solution under dynamic conditions.
In this work, we propose a decision-making pro-
cess based on an information quality rating method
that can cope with ambiguous or contradictory infor-
mation. We focus on two information quality factors:
the false detection rate describing the percentage of
erroneous measurements and the expected event life-
time of the information type. We combine both fac-
tors using an exponential function to decide on the
quality of information. To this end, the event life-
time and the false detection rate are modeled using a
Hidden Markov Model (HMM). Based on the HMM,
we derive a weighting function that is then used in
a weighted majority voting. Consequently, informa-
tion of high quality has a higher impact on the deci-
sion than low-quality information. As a result, we can
drastically decrease the adaption time for information
with high detection rate by lowering the impact of old
information in the voting procedure.
We evaluate our approach for the scenario dis-
played in Figure 1. The vehicles in the Area of In-
exit
POA
car
AOI
Figure 1: Blocked Road.
Meuser, T., Wende, M., Lieser, P., Richerzhagen, B. and Steinmetz, R.
Adaptive Decision Making based on Temporal Information Dynamics.
DOI: 10.5220/0006687900910102
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 91-102
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
91
terest (AOI) drive on the road and may still take the
exit, leading to a longer overall route. Consequently,
if there is a traffic jam at the Place of Action (POA),
the vehicles should take the exit to achieve optimal
routing. However, the information about the state of
the road (jammed or not jammed) needs to be distribu-
ted from vehicles in the POA to those in the AOI. We
evaluate the impact of false information and the time
it takes to adapt to changed road state relying on an
accurate model of vehicular mobility. Our evaluation
shows that our decision-making process outperforms
state-of-the-art approaches significantly, reducing the
amount of false decisions by up to 25%.
The remainder of the paper is structured as fol-
lows: We provide relevant background on HMMs in
Section 2, followed by a discussion of existing ca-
ching systems and their handling of contradicting in-
formation in Section 3. We present our contribu-
tion, the freshness-based majority voting approach for
decision-making under ambiguous or contradictory
information in Sections 4 and 5. Section 6 contains
an in-depth evaluation of our approach, comparing its
performance against state-of-the-art decision-making
processes and the optimal solution derived numeri-
cally. The paper is concluded in Section 7.
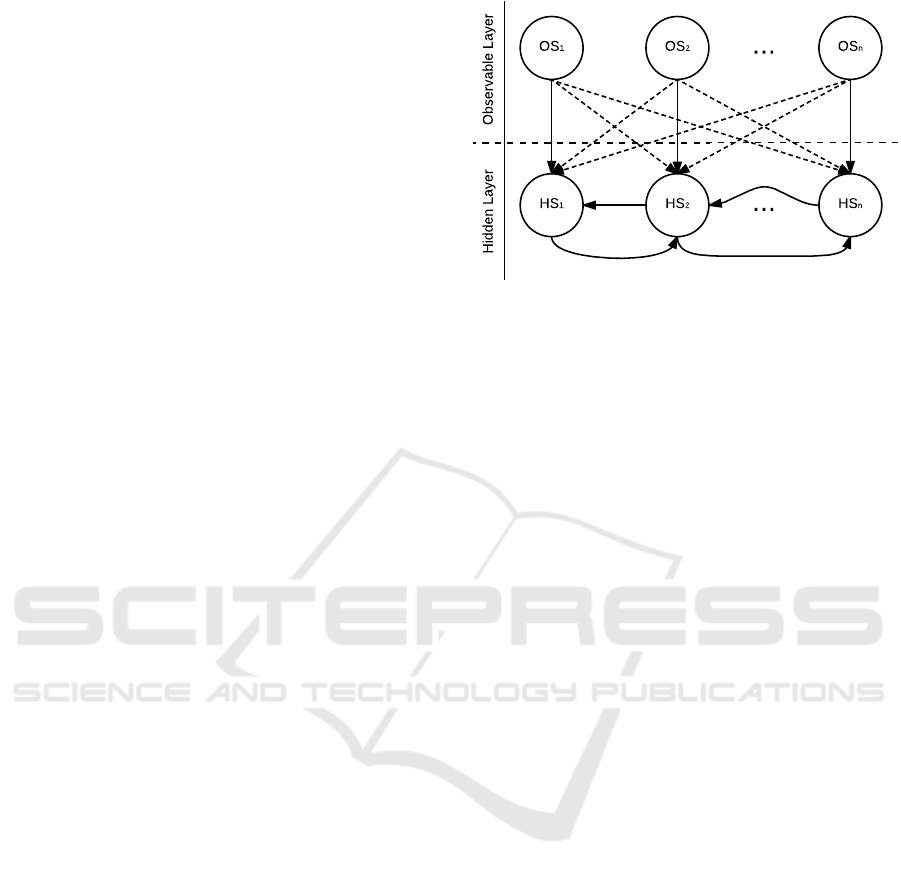
2 HIDDEN MARKOV MODEL
A Hidden Markov Model (HMM) is a statistical mo-
del in which the system states cannot be observed di-
rectly. The hidden states depend on the observable
ones. Thus, the value of the hidden states cannot be
assured.
We model the road conditions and the associated
detection as a HMM. Figure 2 displays a general sy-
stem model. There are two reasons for modeling the
detection of road conditions as a HMM:
2.1 Measurement Error
The connections between the Observable and the Hid-
den Layer symbolize the measurement process. The
real state (Hidden State (HS)) of the road (HS
1
...HS
n
)
is hidden from the vehicles. The vehicles cannot di-
rectly measure the hidden states due to the restrictions
of their onboard sensors. They can only measure the
Observable State (OS) (OS
1
...OS
m
) on the observable
layer, which maps to the associated hidden state with
a certain probability. The solid lines symbolize a high
probability for the mapping. If a vehicle measures a
state OS
i
, there is a high probability that the real state
of the road is HS
i
. However, this cannot be assured. If
the measurement of the vehicle is erroneous, the real
Observable LayerHidden Layer
OS1 OS2
HS1 HS2
OSn
HSn
...
...
Figure 2: Hidden Markov Model for a general system.
state of the road differs from HS
m
. This error is sym-
bolized by the dotted line. The number of observable
states n and the number of hidden states m can differ.
We assume the measurement error to be equal for all
vehicles. Thus, the number of observable states and
hidden states are equal.
2.2 State Change
The hidden state of the road changes over time. Each
state has a probability to stay the same state and a
probability of a state change. The arrows between the
hidden states symbolize the transitions between the
hidden states. If the probability of a state change is
high, the event is highly dynamic. If this probability
is low, the event is considered static.
We will use this specific behavior for the optimi-
zation of our decision algorithm.
3 RELATED WORK
In this section, we summarize the previous works in
the context of this paper. As our approach is based on
the quality of the information for decision making, we
first provide an overview of the respective literature.
After that, we provide an overview of previous works
towards decision making in distributed systems.
3.1 Quality of Information (QoI) in
Distributed Networks
In the literature, Quality of Information (QoI) asses-
sment is a repetitive topic. QoI consists of different
dimensions, each dimension describing a specific pro-
perty of the information. The importance of each di-
mension depends on the application. Not every di-
mensions is applicable useful for all applications.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
92

Wang and Strong (Wang and Strong, 1996) sur-
veyed data consumers on essential quality dimensi-
ons for information management systems. Based on
this work, other researchers adapted the QoI dimen-
sions for their applications. Chae et al. (Chae et al.,
2002) adapted the concept of QoI for mobile inter-
net applications. They took four dimensions into ac-
count, which describe the connection, content, inte-
raction and contextual quality. They survey people to
determine how the different quality dimensions com-
bine to an overall QoI metric.
In vehicular networks, QoI is pivotal for correct
decision making in vehicular applications (Kakkas-
ageri and Manvi, 2014). Each vehicle performs the
information validation by itself. The idea of Fawaz
et al. (Fawaz and Artail, 2013) is to choose the Time
to Live (TTL) dynamically dependent on the history
of changes. With their work, it is possible to esti-
mate the TTL of an information type. For vehicular
networks, three dimensions are most important: the
content quality, the trust between the vehicles and the
spatiotemporal relevance of information. The neces-
sary meta-information are available for every vehicle.
Delot et al. (Delot et al., 2008) estimated the geo-
graphical relevance of information in vehicular net-
works. They calculated the geographical relevance
using the encounter probability of the vehicle and the
information. For the temporal quality, Kuppusamy
et al. (Kuppusamy and Kalaavathi, 2012) publis-
hed an approach called Cluster Based Data Consis-
tency (CBDC). They concentrated on increasing the
data consistency and accessibility in clustered Mo-
bile Ad-hoc Networks (MANETs). They assured the
freshness of information using a TTL value. After the
expiration of the TTL, the information is considered
invalid and removed from the cache. These metrics
are made for their respective use cases. Though, to
the best of our knowledge, there is no metric for deci-
sion making available, which can handle uncertainty.
For this, the temporal relevance, the content quality
and the trust between vehicles are pivotal. We extend
the work of Meuser et al. (Meuser et al., 2017) with
an approach to explicitly model the decrease of infor-
mation value based on the TTL of the information.
3.2 Decision Making under Uncertainty
In most vehicular applications, vehicles rely on a
threshold for the number of messages required to up-
date their decision (Kakkasageri and Manvi, 2014).
Molina et al. (Molina-Gil et al., 2010) researched
on the security consideration in vehicular networks.
They proposed a probabilistic signature validation
scheme to reduce computational overhead while pre-
venting incorrect messages. Hsiao et al. (Hsiao et al.,
2011) modeled the validation of message based on
their quality implicitly. Although their approach focu-
ses on trust, it can be used for inaccurate information
likewise. They validated messages of other vehicles
using the already received messages. The vehicles
only perform an adaptation if the message amount is
sufficiently high.
In previous work, Meuser et al. (Meuser et al.,
2017) used a HMM to model information with dis-
crete event space. Using the spatiotemporal relation
between information, they were able to aggregate in-
formation of different time and location. In their
work, the impact of old information decreases expo-
nentially. Moreover, they took the content quality into
account and decreased the impact of inaccurate infor-
mation. In their work, they did not mention how to
derive the spatiotemporal dependency between infor-
mation.
To our best knowledge, there is still a gap in ra-
ting QoI for dynamic information in vehicular net-
works. Previous work focused either on static infor-
mation or provided non-optimal solutions for dyna-
mic information. Thus, we will focus on a freshness-
and accuracy-aware validation scheme for informa-
tion in vehicular networks.
4 PRELIMINARIES
Vehicles can exchange information using multiple
communication technologies. Available communi-
cation technologies are the cellular network and the
wifi-based 802.11p standard. In general, 802.11p
is used for emergency communication, while non-
safety-related services need to be performed via mo-
bile communication, as 802.11p is not suitable for
high distances due to its multihop behavior. An ex-
ample for non-safety-related services is the distribu-
tion of jam information.
Non-safety-related information contains meta-
information to enhance the information. This meta-
information are the detection time, the detection place
and the expected lifetime. That information is essen-
tial for other vehicles to rate the information.
This information is distributed among the affected
vehicles using a Publish/Subscribe system. For this
system, we assume that every vehicle is equipped with
a cellular network connection. A Publish/Subscribe
server manages subscriptions and publications.
Adaptive Decision Making based on Temporal Information Dynamics
93
4.1 Publish/Subscribe System
The Publish/Subscribe system used is an attribute-
based Publish/Subscribe system. The attributes are
the ids of the road segments on which the informa-
tion is located. These ids can, e. g., be extracted from
OpenStreetMap
1
.
While driving on the streets, each vehicle percei-
ves its environment and shares the information with
interested vehicles. For that, the vehicle publishes the
information with the id of the affected road segment.
Interested vehicles subscribe to road segments to
receive this information. Those road segments are
parts of the planned route of the vehicle. Once a vehi-
cle receives information, this information is stored in
the cache until the information lifetime expires.
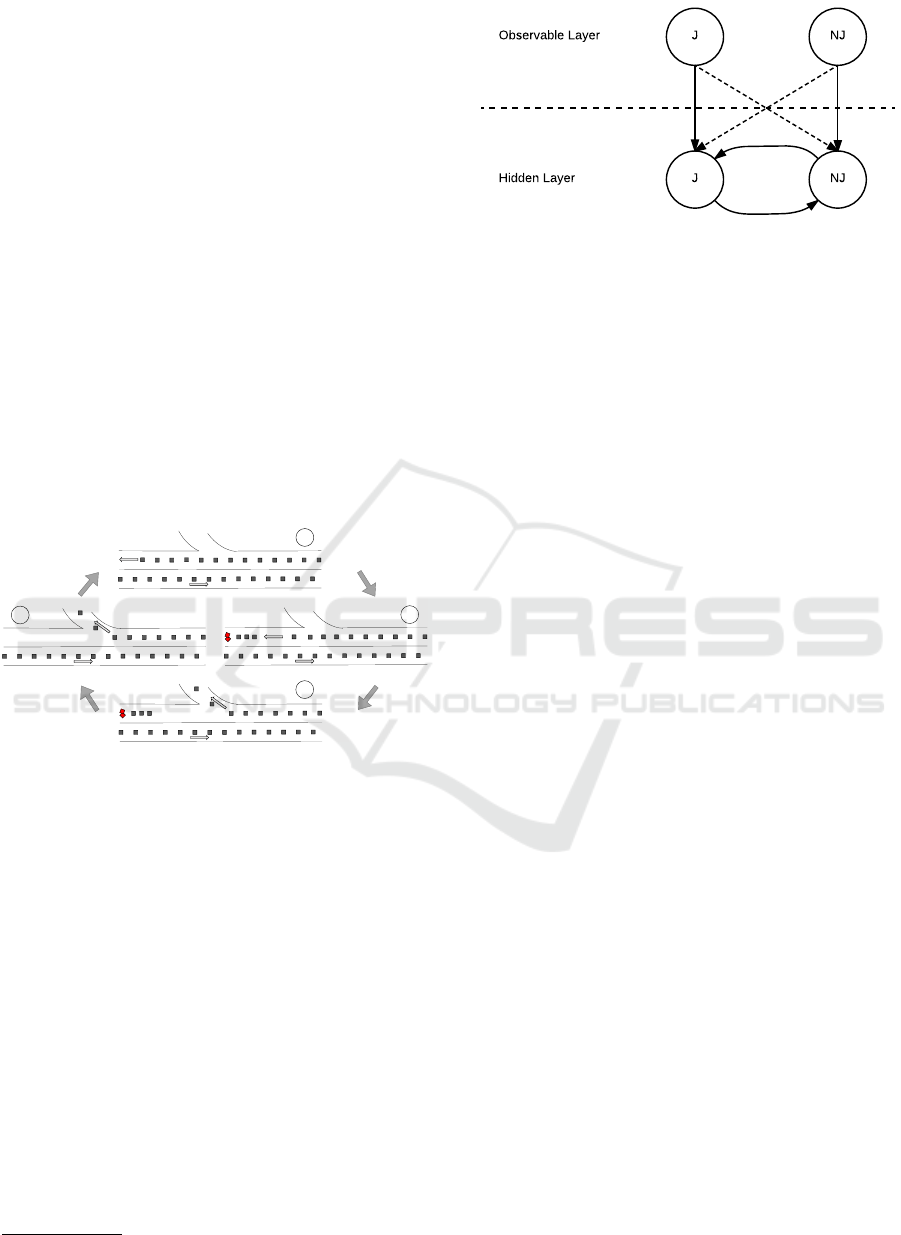
4.2 Scenario Description
In this work, we focus on an example scenario, which
is visualized in Figure 3. It can be divided into 4 dif-
ferent phases.
exit
exit
exit
1
exit
2
3
4
Figure 3: Visualization of the different road Phases.
In the first phase, there is no traffic jam, and the
traffic flows as usual.
In the second phase, an obstacle blocks the road,
e. g., a broken car. Due to the road blockage, the traf-
fic jams. Several hundred meters distant from this
point, there is an exit to bypass the accident. Howe-
ver, the drivers near this exit do not know about this
incident. Hence, they do not leave the road and drive
into the traffic jam. As the vehicles in the jam know
about the blockage, they publish this information. A
vehicle near the exit receives this information. After
it believes the other vehicles that there is a jam, the
system changes to the third phase.
In the third phase, the vehicles take the exit. We
assume that under normal traffic conditions the exit of
the road is a diversion. However, during the blockage
of the road, the detour is the fastest route.
In the fourth phase, once the road blockade is over,
the drivers still take the detour because they have no
1
http://www.openstreetmap.org
Observable Layer
Hidden Layer
J NJ
J NJ
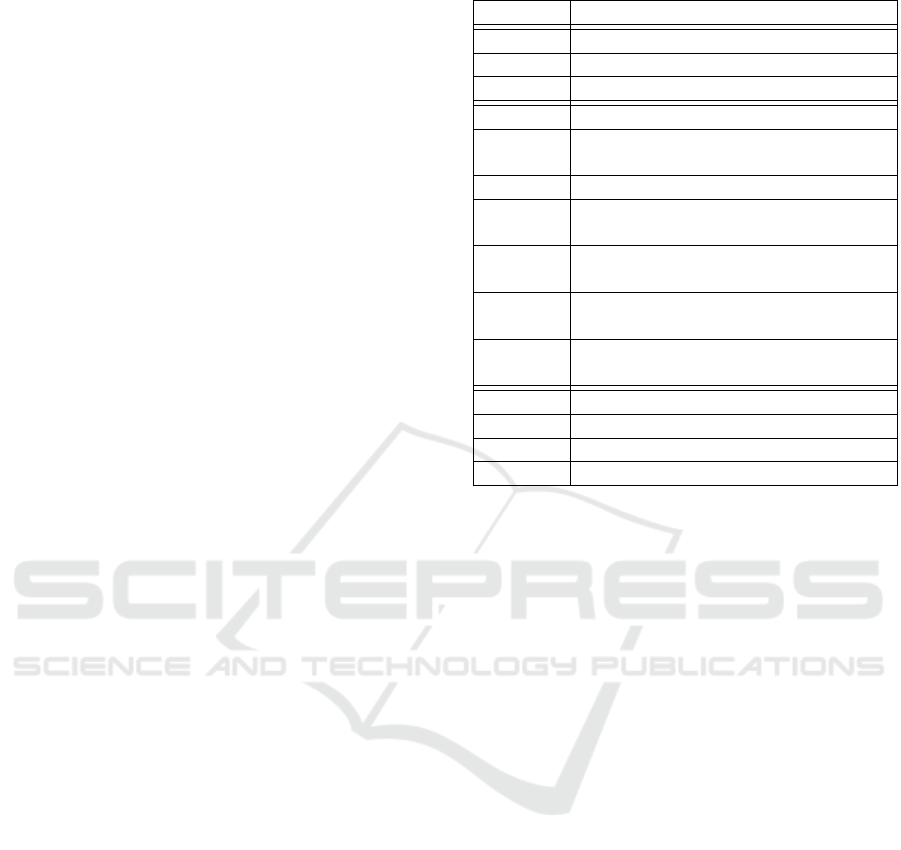
Figure 4: Hidden Markov Model for a traffic jam.
information about the jam dissolution. Thus, the vehi-
cles at the former traffic jam publish the information
that the jam has resolved. After the vehicles near the
exit are confident in the received information, they
stay on the road and do not take the detour anymore.
4.3 Traffic Jam Modeling
The example scenario uses a traffic jam as an exam-
ple for road blockage. To make decisions based on
the information type, we need to model the informa-
tion. We use the model of a HMM as already used in
(Meuser et al., 2017). With the HMM, the transition
between states can be predicted easily. This model is
trained with historic data.
The HMM for a traffic jam is shown in Figure 4.
We assume there are two states for this information
type: either a road segment is jammed or not jammed.
Once a vehicle tries to measure the state of a road
segment, it has a certain probability to measure the
correct state, i. e., measuring the road is jammed, and
the road is jammed. With a low probability, the mea-
surement is wrong, i. e. the vehicles measure the road
is jammed, but the road is not jammed. The solid line
between the observable layer and the hidden layer is
of high probability, while the dotted line is of low pro-
bability.
The change of a road naturally changes over time.
If a vehicle has measured the state of the road in the
past, this measurement cannot predict the future state
with certainty. We model this behavior with the state
transition in the hidden layer.
4.4 Decision Making
Every time a vehicle has the chance of a detour, it
checks the information in its cache. If there is a road-
related information for the road segments after the
current and the next exit, the vehicle evaluates the
available information. If the vehicle expects the in-
formation to be correct and valid, it takes the exit.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
94
A traffic jam is a dynamic information in the vehi-
cular context. As vehicles can only observe their close
environment, the quality of a jam detection is varying.
5 QUALITY OF INFORMATION
BASED DECISION-MAKING
Decision-making algorithms can benefit many vehi-
cular applications. In this paper, we investigate the
example of jam detection. Like most other informa-
tion required by vehicular applications, the jam state
of the road changes regularly.
Existing approaches from literature do not use the
full potential of the information, as they do not con-
sider these information-specific properties and thus,
adapt either too slow or too fast.
Slow adaptation leads to decisions based on false
knowledge. If the environment changes, the vehicle
still considers the old information as correct. This
misinformation produces costs for the vehicles, which
is, e. g., the unnecessary rerouting in case of a traffic
jam.
On the opposite, fast adaptation is very sensitive
to false information and creates costs through incor-
rect information. The costs of slow and fast adapta-
tion are obviously contrary. The costs through false
information rise if an approach adapts very fast to in-
coming information. On the other hand, the costs rise
with increasing change rate of the environment if an
approach adapts slowly.
In the following, we derive a formula for the costs
of both fast and slow adaptation. We solve the re-
sulting optimization problem to achieve the lowest
possible cost.
5.1 Problem Formulation
For convenience, Table 1 provides an overview of the
used variables.
We minimize the total costs c
total
(n) for wrong de-
cisions as shown in Equation 1. The variable n is the
number of messages after which the vehicle adapts to
incoming information and updates its decision. Chan-
ging the value of n influences the adaptation speed of
the algorithm.
minc
total
(n) (1)
The total costs c
total
(n) for a wrong decision con-
sist of two costs, the costs of slow and fast adaptation.
They are shown in Equation 2.
Table 1: Overview of used Variables.
Variable Description
c
total
Total costs of wrong decisions
c
slow
Costs of slow adaptation
c
f ast
Costs of fast adaptation
n Number of messages for adaptation
n
opt
Optimal number of messages for
adaptation
p
f
Rate of incorrectly sensed information
p
c
Change probability of the sensed en-
vironment per time interval
T Time to Live (TTL) for the informa-
tion type
C
f ast
Costs of an incorrect change of deci-
sion per time interval
C
slow
Costs of an incorrect keep of decision
per time interval
t
i
Age of information i
s
i
State of information i
f (t
i
) Impact function of information i
I(s) Impact of all information of state s
c
total
(n) = c
f ast
(n) + c
slow
(n) (2)
The first summand is the costs c
f ast
(n) for a too
fast adaptation. Too fast adaptation leads to a high
impact for erroneous measurements. Thus, for low
accuracy measurements, the adaptation is required to
be slow. The second summand is the costs c
slow
(n) for
a too slow adaptation. If the real variable value chan-
ges, but the vehicle does not adapt to this change, the
vehicle makes the wrong decision. For high accuracy
information, the adaptation time can be low to decre-
ase this costs.
The costs c
f ast
(n) are calculated in Equation 3.
They consist of the probability for a vehicle receiving
a sufficiently high number of wrong information to
adapt to the false information. The vehicle calculates
this probability using the false detection rate p
f
de-
rived from the HMM. For this, the average false de-
tection rate is used. The variable C
f ast
represents the
costs that describe the negative impact of the deci-
sion. These costs depend on the additional costs that
emerge for the vehicle in case of a false adaptation.
They are the difference between the costs of the adap-
tation and the costs of the correct decision.
c
f ast
(n) = p
n
f
∗C
f ast
(3)
The costs c
slow
(n) are shown in Equation 5. These
costs consist of the number of messages required for
the change n, the probability for a change p
c
and the
costs of the wrong decision C
slow
. n states the number
of messages that a vehicle requires to update its deci-
sion. As long as the vehicle has not received the requi-
Adaptive Decision Making based on Temporal Information Dynamics
95

red amount of messages, it will make the wrong deci-
sion. We derive the probability for a change p
c
from
the rate r of incoming messages per second. Vehicles
individually measure this rate, but consider this rate
to be constant. We calculate p
c
under the assump-
tion that the message is invalid after the TTL T . A
message is invalid once the probability for any state
is equal to the probability for the current state. Equa-
tion 4 shows the value for p
c
with
|
S
|
being the num-
ber of possible states.
p
c
= 1 −
T
p
1/
|
S
|
(4)
The costs C
slow
are calculated similarly to the
costs C
f ast
, using the difference in cost of the best de-
cision and the decision that has been made.
c
slow
(n) = n ∗ p
c
∗C
slow
(5)
5.2 Optimization Problem
As we want to minimize the costs of wrong decisions,
we minimize the costs c
total
. We search for this mi-
nimum by deriving the costs c
total
(n) for n and set it
equal to 0 as shown in Equation 6. We transform this
equation to Equation 7.
δ
δn
c
total
(n) = 0 (6)
p
n
f
∗ln(p
f
) ∗C
f ast
+ p
c
∗C
slow
= 0 (7)
Solving Equation 7 results in the optimal number
of messages n
opt
. If a vehicles adapts to incoming in-
formation after n
opt
messages, the total costs for this
value is minimal, which can be derived from the be-
havior of the cost function. Equation 8 shows the op-
timal value n
opt
. We require the number n
opt
to be
integral, thus round it.
n
opt
=
$
ln
−
p
c
ln(p
f
)
∗
C
slow
C
f ast
ln(p
f
)
%
(8)
We need to develop an algorithm that adapts to
new information after n
opt
messages. An intuitive ap-
proach uses the approach from the literature, which
adapts after a certain amount of information. This ap-
proach is robust to false information. However, its
adaptation is still slower than possible.
This slow adaptation is justified by the algorithm
behavior, which requires n
opt
messages in a row to
perform the adaptation. Assuming a vehicle receives
n
opt
−1 messages with the new information and after-
ward one message with the old information, it cancels
the adaptation and needs to restart it. Thus, we deve-
lop an algorithm that solves this problem.
5.3 Quality of Information-based
Majority Voting
We propose a freshness-based majority voting algo-
rithm which optimizes the costs. In the existing lite-
rature, two main approaches are proposed for decision
making:
A conventional approach is to decide after a cer-
tain amount of information. This approach considers
information to be correct if the vehicle has received a
certain amount of messages with that information in a
row. The issue with this approach is the determination
of the exact message amount. For low amounts, this
approach is very prone to false information.
The other standard approach decides using the
amount of available information. This approach con-
siders the information as correct, of which it has sto-
red the most messages in the cache. This approach is
resilient to incorrect information but adapts to chan-
ges slowly.
Our approach is based on majority voting and
combines the advantages of both these approaches.
In conventional majority voting, every vote has equal
weight. Majority voting by itself is very resilient to
incorrect information but adapts to changes slowly.
We solve this problem by changing the weights for
the information in the voting process. The weight the
information is chosen in a way that a vehicle adapts
after an optimal amount n
opt
of information.
Our approach considers the freshness and accu-
racy of the information and works as follows: Given
a set of messages M for a particular edge, the vehi-
cle can calculate the voting score using the age t
i
and
the state s
i
of the messages i = 1..|M| as shown in
Equation 9. M
s
is the subset of messages containing
messages of the state s. The function f (t) is an im-
pact function, which adapts to the information type.
The parameter t is the age of the information in the
cache.
I(s) =
∑
i|s=s
i
f (t
i
)
∑
|M|
i=1
f (t
i
)
(9)
The vehicle chooses the state with the highest im-
pact score I(s). The advantage of our approach is that
it adapts faster to environmental changes than conven-
tional majority-voting, as old information are assig-
ned smaller weights. Compared to always adapting
to the newest available information, our approach is
less prone to false information and can, thus, ensure a
higher percentage of correct decisions.
The impact function f (t) weights information in
the cache. This function describes the tradeoff bet-
ween fast adaptability and resilience to false informa-
tion. In the next part, we will derive the function f (t).
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
96

5.4 The Impact Function f (t)
The impact function f (t) depends on the expected rate
of false information p
f
and the change rate of the in-
formation p
c
. As described in section 4, we model the
road information using a Markov chain. Thus, f (t)
is a general exponential function as shown in Equa-
tion 10.
f (t) = a ∗e
bt
+ d (10)
Based on f (t), any exponential function can be
created using the appropriate values for a, b and d. In
the following, we will derive the values for the para-
meters a, b and d using the three requirements of this
function.
5.4.1 Impact of New Information
The initial weight of detected information needs to be
equal to the expected accuracy of this information. As
t is the age of the information, Equation 11 must be
true.
f (0) = a + d = 1 − p
f
(11)
5.4.2 Invalidation of Information After the TTL
A vehicle removes information from the cache after
the TTL has expired. The weighting function gradu-
ally decreases the impact of the information. Thus,
the impact of the information at the expiration of the
TTL equals 0 and Equation 12 must hold true.
f (T ) = a ∗e
bT
+ d = 0 (12)
Using these two requirements, we can derive the
family of parametric functions with the parameter b in
Equation 13. For this, Equation 11 and Equation 12
are inserted to replace the values of a and d. Thus,
this family of parametric functions ensures that the
two requirements of Equation 11 and Equation 12 are
satisfied regardless of the value of b.
f
b
(t) =
(1 − p
f
) ∗
e
bt
−e
bT
1 −e
bT
(13)
Figure 5 displays the impact of the parameter b on
the behavior of the respective functions. For variables
with a low detection accuracy, the impact function
needs to stay at its start value for a long time to com-
pensate for the high amount of measurement errors.
For variables with high detection accuracy, the impact
function reduces the impact drastically after a short
time to utilize the high reliability of the detected in-
formation.
To determine the exact value for the parameter b,
the third and final requirement to this function is used.
For this, we developed a trial-and-error based heuris-
tic to approximate b.
0 1 2 3 4 5
Age of the information [min]
0.00
0.25
0.50
0.75
1.00
Value for f
b
(t)
b = ∞
b = 0.1
b ≈ 0
b = −0.01
b = −∞
Figure 5: Visualization of the family of functions for diffe-
rent parameters b.
5.5 Approximation of b
We use the message amount n
opt
with the minimal
cost value to choose the appropriate value for b. We
choose b such that the vehicle updates its decision af-
ter n
opt
messages. However, the vehicle cache con-
tains only a certain amount of messages with certain
timestamps. To map the amount n
opt
to the local kno-
wledge of the vehicle, we derive the rate of messages
r per second from the information already stored in
the cache. Using the rate r, we assume a uniform dis-
tribution of information in the cache.
For the approximation of b, we look at a consistent
cache with uniformly distributed messages. This con-
sistent cache is a simplification, but in the evaluation,
we can show that it performs well in simulations. We
cannot use the actual distribution of the information
in the cache as we cannot evaluate the correctness of
the information in the cache and have no insights on
future messages.
Equation 14 shows the impact I(s
o
) for the former
state s
o
. This state has been active before a change.
The impact of the state sums the results of the impact
function for all information in the cache starting from
message n
opt
to the last message T /r. We use n
opt
as
the first message because the messages from 0 to n
opt
are the messages with the new state.
I(s
o
) =
bT /rc
∑
n=n
opt
+1
f
b
(n ∗r) (14)
In addition to the impact of the old state, Equa-
tion 15 shows the impact I(s
c
) of the current state s
c
.
The change happened at the time t = n
opt
∗r. As the
information with the new state comes in with same
rate r as before the change, we sum the impact of all
messages between 0 and n
opt
I(s
c
) =
n
opt
∑
n=0
f
b
(n ∗r) (15)
We want to have a decision update after n
opt
mes-
sages. For all n smaller than n
opt
, the vehicle does not
Adaptive Decision Making based on Temporal Information Dynamics
97
change its decision. After the vehicle has changed its
decision, the impact of the new decision raises con-
stantly and thus it sticks to that decision. To find the
optimal value of b, at which the adaptation is perfor-
med after n
opt
, the impact of the old and the new state
need to be similar. Equation 16 shows this equality.
bT /rc
∑
n=n
opt
+1
[ f
b
(n ∗r)] =
n
opt
∑
n=0
[ f
b
(n ∗r)] (16)
We solve this equation by trying out different va-
lues for b until we find a b for which this equality
holds. Once we find b, we have completed our im-
pact function, which a vehicle uses for its decision
making. We define the two extreme cases separately.
For n
opt
= 0, b is equal to ∞ and for n
opt
+1 > T /r, b
is equal to −∞. Using b, we can exactly calculate the
impact of old information and thus make good decisi-
ons based on that information.
5.6 Uniform Distribution of Messages
For the described approach, the messages in the ca-
che need to be uniformly distributed. This distribu-
tion is automatically achieved for information which
the vehicles detect bypassing, as vehicles are natu-
rally driving over the road segment one after the ot-
her. However, if the vehicles get stuck at the informa-
tion location, each vehicle transmits the information
on detection and retransmits it after the expiration of
the TTL. This approach leads to many messages at
roughly the same time.
We solve this problem by adding a random factor
to the first retransmission interval. Instead of retrans-
mitting after the expiration of the TTL, the vehicle
performs the first retransmission after a random time,
which is between 0 and the TTL T . This way, the
messages are distributed more uniformly.
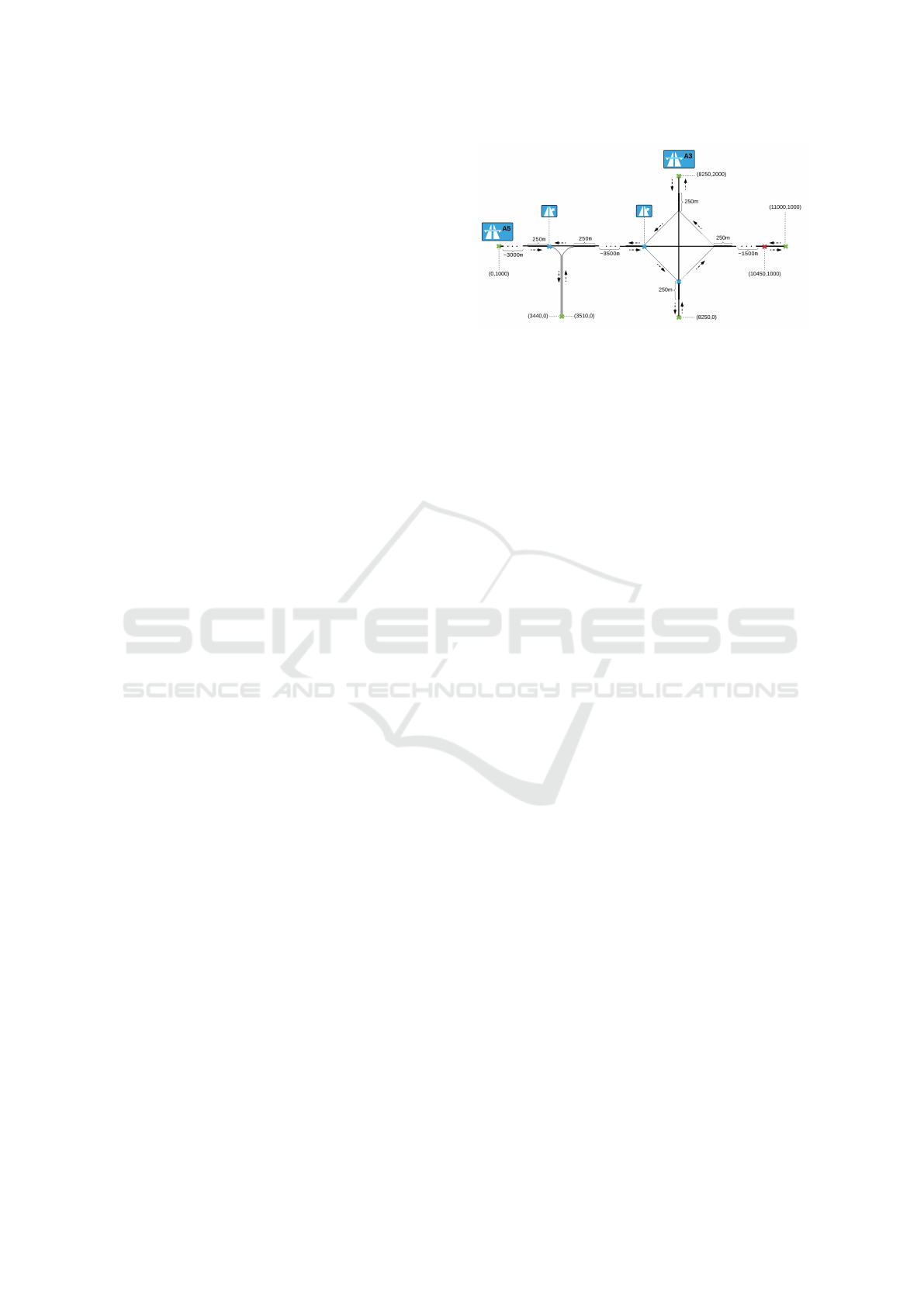
6 EVALUATION
For the evaluation of our developed decision appro-
ach, we simulate a traffic jam on a highway. In front
of the traffic jam, each vehicle has the possibility to
leave the road. Figure 6 displays the road scenario.
Initially, there is no information about traffic jams
in the network. At a certain point in time, the traf-
fic congests and the vehicles distribute the informa-
tion about the traffic jam using a Publish-Subscribe
system. As there were no messages in the network
before, the adaptation for the initial jamming of the
road is fast. After a certain amount of time, the traffic
Figure 6: Schematic overview of the road scenario.
jam resolves and thus, the vehicles at the jam loca-
tion publish the information that the traffic jam has
resolved. However, there are already information in
the vehicle’s cache indicating that there is a traffic
jam. Hence, the adaptation to the new requirements
is far more challenging as each vehicle needs to de-
cide on the correctness of the cached information. We
consider this scenario as an appropriate scenario for
decision-making, as each vehicle decides to leave or
stay on the road.
We implement this scenario in the event-based Si-
monstrator framework (Richerzhagen et al., 2015).
The Simonstrator is a network simulator, which sup-
ports different communication technologies (mobile
and ad-hoc communication) and, beyond others, the
Publish/Subscribe paradigm. As the movement mo-
dels in the Simontrator are not suitable for our vehi-
cular usecase, we extend the Simonstrator with Simu-
lation of Urban Mobility (SUMO) (Behrisch et al.,
2011). The connection to SUMO is accomplished
using the TraCI interface of SUMO.
In the evaluation, we used two metrics to compare
our approach to the state-of-the-art approaches: the
costs of wrong decisions and the ratio of correct deci-
sions. We put special focus on the reduction of costs
induced by wrong decisions. We assume that costs
occur every time a vehicle would have made a wrong
decision. Thus, we observe the cache and make a de-
cision every second. If this decision is wrong, we add
the appropriate costs to the total costs.
For comparison, we implemented both an optimal
strategy and a random strategy. The optimal strategy
chooses the correct information out of the cache using
global knowledge, but can still make the wrong deci-
sion if there is no correct information in the cache.
The random strategy chooses information out of the
cache randomly and considers this information as cor-
rect. We expect none of the described approaches
to perform better than the optimal or worse than a
random approach. Thus, these are suitable bounds.
We combine those two strategies to determine the
used optimization potential of every approach. We
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
98
0% 1% 5% 20%
False detection rate
0.0
0.2
0.4
0.6
0.8
1.0
Used optimization potential
QoI-based
Newest-information
Majority-voting
(a) Used optimization po-
tential
0% 1% 5% 20%
False detection rate
0
50
100
150
200
250
Total Costs
Optimal
QoI-based
Newest-information
Majority-voting
(b) Total costs
Figure 7: Total costs for different false detection rates.
calculate the used optimization potential as shown in
Equation 17.
opt =
c
approach
−c
random
c
optimal
−c
random
(17)
Table 2 gives an overview of the considered para-
meters and their values. We varied the false detection
rate, the jam duration and the costs of a wrong detour.
The bold values in the table are the default ones. The
costs are calculated based on the cost ratio. To ensure
a comparability of costs, we set C
f ast
+C
slow
= 2. The
evaluation source code is freely available
2
.
Table 2: Overview of used variables.
Evaluation parameter Value
False Detection Rate [0%, 1%, 5%, 20%]
Jam Duration [200s, 300s, 400s]
Cost Ratio between the
costs of a wrong stay
and a wrong exit
[0.1, 1, 10]
We first have a look at the metrics for the diffe-
rent false detection rates, as the false detection rate
has the highest impact on the results. For the other
parameters, we only investigate on the costs of wrong
decisions.
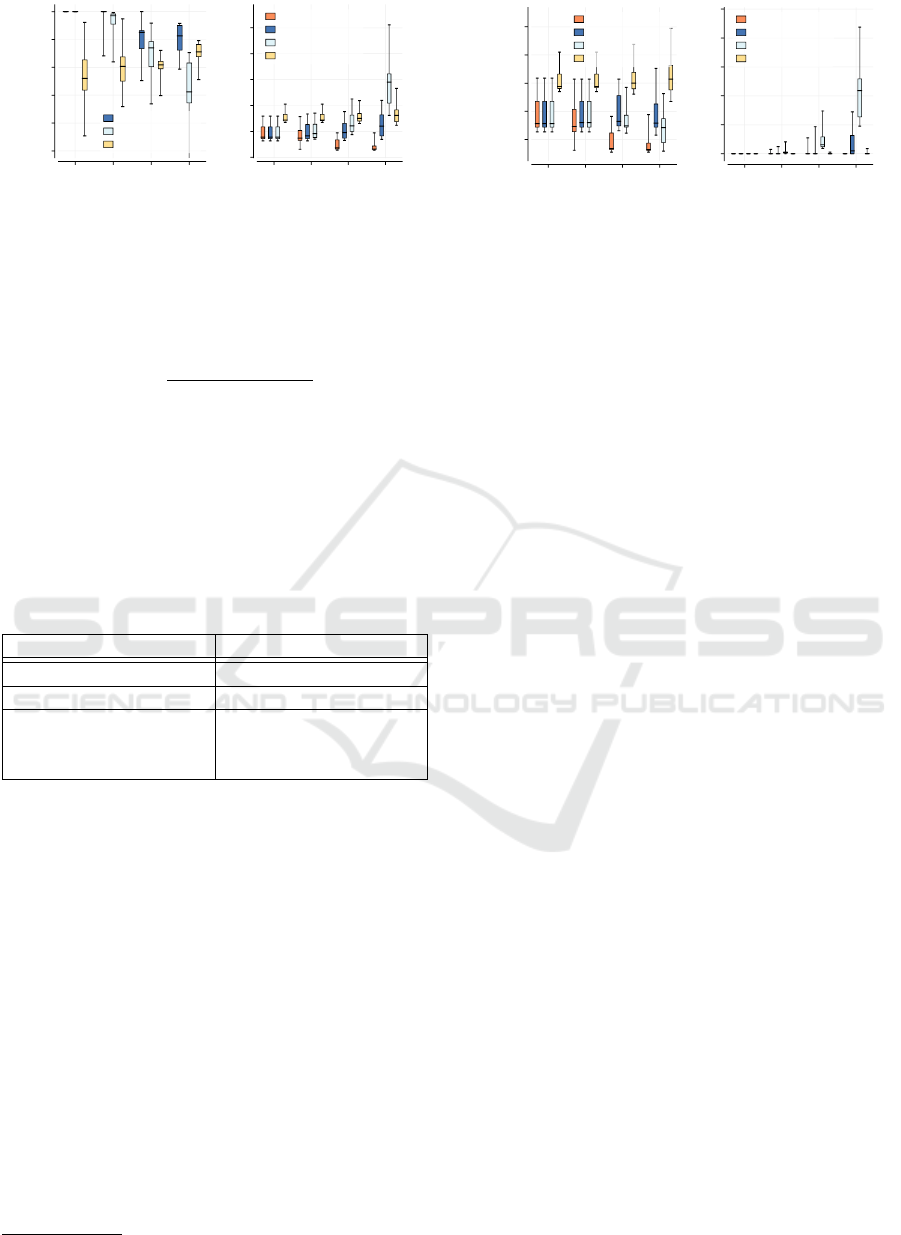
6.1 Impact of the False Detection Rate
for the different Approaches
At first, we investigate on the costs and after that on
the percentage of correct decisions for different false
detection rates.
6.1.1 Costs of False Decisions
Figure 7(a) shows the used optimization potential of
our approach compared to the approaches in the li-
terature dependent on the false detection rate. For
2
https://dev.kom.e-technik.tu-darmstadt.de/simonstrator/
0% 1% 5% 20%
False detection rate
25
50
75
100
125
Costs for slow adaptation
Optimal
QoI-based
Newest-information
Majority-voting
(a) Costs of slow adapta-
tion
0% 1% 5% 20%
False detection rate
0
50
100
150
200
250
Costs for fast adaptation
Optimal
QoI-based
Newest-information
Majority-voting
(b) Costs of fast adapta-
tion
Figure 8: Costs by cause for different false detection rates.
a false detection rate of 0%, our approach and the
newest-information approach perform as well as the
optimal approach, while the majority-voting based
approach performs much worse due to its slow adap-
tation to environmental changes. The used opti-
mization potential of our approach and the newest-
information approach drops with increasing false de-
tection rate. In contrast, the optimization potential of
the majority-voting based approach increases. Our
approach converges towards the majority-voting ba-
sed approach for high false detection rates. The re-
ason for the increased performance of the majority-
voting based approach is the decrease of time for
adaptation to environmental changes, as the number
of correct messages in the cache is lower.
Figure 7(b) displays the total costs. Regarding to-
tal costs, our QoI-based approach has almost equal to-
tal costs regardless of the false detection rate. Compa-
red to the approach selecting the newest information,
our approach has up to 56% reduced overall costs de-
pendent on the false detection rate and up to 43% re-
duced costs compared to the conventional majority-
voting based approach. The total costs of the opti-
mal approach decrease with increasing false detection
rate, as false messages lower the adaptation time af-
ter the traffic jam. We explain this behavior in more
detail in the next paragraph.
In Figure 8(a) the costs of slow adaptation are
shown. We can observe that the costs of our QoI-
based approach are almost equal to the costs of the
fastest approach, which immediately adapts to new
information. This is a great result, as our approach
is far more robust to false information. The majority-
voting approach has high costs of slow adaptation,
as expected, since many message are required for a
decision change. Interestingly, some of the appro-
aches have lower costs of slow adaptation with hig-
her false detection rate. Normally, it is expected that
those costs increase with increasing false detection
rate. However, this behavior happens if a vehicle
performs a false measurement during the traffic jam,
i. e., a message stating that the traffic jam has resol-
Adaptive Decision Making based on Temporal Information Dynamics
99

0% 1% 5% 20%
False detection rate
0.0
0.2
0.4
0.6
0.8
1.0
Correct decision ratio
Optimal
QoI-based
Newest-information
Majority-voting
(a) Percentage of correct
decisions during the jam
0% 1% 5% 20%
False detection rate
0.0
0.2
0.4
0.6
0.8
1.0
Correct decision ratio
Optimal
QoI-based
Newest-information
Majority-voting
(b) Percentage of correct
decisions after the jam
Figure 9: Percentage of correct decisions for different false
detection rates.
ved. Although that measurement was incorrect at
this point, it becomes true as the traffic jam resolves
shortly after. As this originally false message is also
used in the decision process, the adaptation time and
thus the costs can be lower with increasing false de-
tection rate.
Figure 8(b) shows the costs of fast adaptation.
Those costs are 0 for all approaches for a false de-
tection rate of 0%, as there are no false measurements
in the system. With increasing false detection rate, the
costs of fast adaptation of the algorithm increase. This
is caused by the increasing number of false informa-
tion in the system, which challenges the robustness of
each approach. The newest-information approach is
not robust to false information, thus the costs of fast
adaptation increase drastically. Compared to that, the
costs of fast adaptation of our QoI-based approach in-
crease only slightly and are much lower than the costs
of the newest-information approach. In contrast, our
approach has higher costs of fast adaptation than the
majority-voting based approach, but this behavior is
intentional, as the higher costs of the fast adaptation
produce lower costs of slow adaptation. Interestingly,
even the optimal approach has costs of fast adapta-
tion. This is not intuitive, as the optimal approach ne-
ver makes a wrong decision. However, even the op-
timal algorithm makes wrong decisions, if there are
only false information in the cache. This happens if
the last correct message is removed from the cache
due to its age.
6.1.2 Percentage of Correct Decisions
This metric investigates the effects that the decision
approach has on the vehicles. Every time, a vehicle
makes a decision, this decision is stored and influen-
ces the metric. Two phases are investigated. The first
phase is for the decision-making during the jam. Me-
aning, this metric is the percentage of vehicles that
have successfully taken an exit. The second phase is
for the decision-making after the jam. This metric is
400 300 200
Event lifetime [s]
0.0
0.2
0.4
0.6
0.8
1.0
Used optimization potential
QoI-based
Newest-information
Majority-voting
(a) Used optimization po-
tential
400 300 200400 300 200
Event lifetime [s]
0
50
100
150
200
250
Costs
Optimal
QoI-based
Newest-information
Majority-voting
Costs for slow adaptation
Costs for fast adaptation
(b) Total costs of wrong
decisions with cause
Figure 10: Costs for different jam durations.
for the percentage of vehicles that have stayed on the
road after the traffic jam has resolved.
Figure 9(a) shows the correct decision ratio during
the traffic jam. At the beginning of the jam, there is
no information in the cache, as the vehicles do not
share any information prior to the jam. Thus, the ra-
tio is generally higher compared to the situation after
the jam. However, a high correct decision ratio du-
ring jam means that only a few vehicles are in the jam
and able to measure the road state. Thus, the ratio of
correct decisions drops with increasing false detection
rate, as the impact of false information is higher with
fewer messages in the system. Moreover, we can see
that our QoI-based approach perform better than the
newest-information approach for every false detection
rate and only slightly worse than the majority-voting
based approach.
The ratio of correct decisions after the jam is
shown in Figure 9(b). Our QoI-based approach
is equally good as the newest-information approach
with a false detection rate of 0%, but while the
newest-information approach drops with increasing
false detection rate, our QoI-based approach is robust
to false information and thus stays almost at the same
level. The performance of the majority-voting based
approach also does not drop with increasing false de-
tection rate. However, its correct decision ratio is al-
ways lower than the one of our QoI-based approach.
6.2 Impact of the Jam Duration to the
different Approaches
Figure 10 shows the costs and the cost distribution
for the different jam durations. With decreasing jam
duration, the used optimization potential decreases li-
kewise as shown in Figure 10(a). However, the ratio
between the different approaches is not affected sig-
nificantly.
To explain the decrease of costs with decreasing
jam duration, we use the distribution of costs shown
in Figure 10(b). There are two reasons for this de-
crease. Firstly, the number of messages in the cache
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
100

is lower, as fewer vehicles published the information.
Thus, the number of messages required for adaptation
is also lower. This is true for our QoI-based approach
as well as for the majority-voting based approach. Se-
condly, the possibilities for wrong decisions during
the jam is lower, as the jam duration is shorter. The
newest-information approach is one of the examples,
where the costs of fast adaptation decrease due to the
shorter jam duration. However, the costs of fast adap-
tation does not decrease strongly. This is due to the
lacking robustness of the newest-information appro-
ach. This leads to a very time until the system has
recovered after the jam, which increases the costs of
this approach.
Conclusively, we derive that our QoI-based appro-
ach outperforms the other approaches independently
of the jam length.
6.3 Impact of the Costs Ratio to the
different Approaches
Figure 11 shows the costs for different cost ratios. In
this example, a cost ratio of 10 means that a wrong
stay on the road is 10 times more expensive than a
wrong leave. Similarly, a cost ratio of 0.1 means that
it is 10 times more expensive to leave the road than to
stay. Figure 11(a) shows the used optimization poten-
tial of the different approaches. Our QoI-based appro-
ach performs best for all of the considered cost ratios.
It is also the only approach that reaches the full op-
timization potential in some cases. With increasing
cost ratio, the used optimization potential of all ap-
proaches increases. This behavior is analyzed using
Figure 11(b).
For the optimal approach, the costs of slow adap-
tation are almost 0. As this approach adapts fast to
the jam resolving, the main costs arise through the
road jamming. Thus, the costs of falsely staying on
the road are the most significant factor for the opti-
mal approach. As these costs increase with increa-
sing cost ratio, staying on the road is punished addi-
tionally. Thus, the overall costs of the optimized ap-
proach increase with increasing cost ratio. For all the
other approaches, the overall costs decrease as a part
of the costs are caused by leaving the road wrongly.
This is justified by the evaluation scenario, as the out-
dated information in the cache slows down the adapta-
tion process. Thus, the costs of slow adaptation decre-
ase if the costs of leaving the road wrongly are small.
We can observe that our QoI-based approach outper-
forms the other two approaches for a cost ratio of 0.1
and 1 significantly. For a cost ratio of 10, in which
slow adaptation after the jam is not costly, our appro-
ach performs only slightly better than the majority-
0.1 1 10
Cost ratio
0.0
0.2
0.4
0.6
0.8
1.0
Used optimization potential
QoI-based
Newest-information
Majority-voting
(a) Used optimization po-
tential
0.1 1 100.1 1 10
Cost ratio
0
50
100
150
200
250
Costs
Optimal
QoI-based
Newest-information
Majority-voting
Costs for slow adaptation
Costs for fast adaptation
(b) Total costs of wrong
decisions with cause
Figure 11: Costs for different cost ratios.
voting based approach, as the slow adaptability of the
majority-voting based approach is balanced by its ro-
bustness.
6.4 Evaluation Results
The evaluation shows that our approach reduces the
total costs compared to both of the existing approa-
ches dependent on the scenario by up to 25%. Additi-
onally, our approach has never a higher total cost va-
lue than the other approaches. It achieves that impro-
vement by balancing its robustness and fast adapta-
bility to environmental conditions to achieve optimal
results. For the extreme cases, our algorithm conver-
ges to the newest-information and the majority-voting
based approach respectively. Moreover, we observed
that the jam duration has no impact on the perfor-
mance improvements of our approach, which makes
it usable for decisions based on arbitrary information.
7 CONCLUSION
In this paper, we proposed a Quality of Information
(QoI)-based decision making process. In this decision
making process, false decisions produces costs for the
deciding vehicle. False decisions have two reasons,
missing robustness to false measurements and slow
adaptation to environmental changes. Our novel de-
cision making process considers information-specific
properties, to make decisions inducing the lowest pos-
sible costs.
This decision making process is based on a weig-
hted majority-voting. The used weighting deter-
mines the impact of an information and considers
information-specific properties. Those properties are
modeled using a Hidden Markov Model (HMM) con-
sidering the false detection rate and the information
lifetime. Those two properties most important for the
information impact function, as missing sensor accu-
racy and outdated information are common challen-
ges in distributed networks.
Adaptive Decision Making based on Temporal Information Dynamics
101

To chose the appropriate impact function f (t), we
construct an optimization problem to minimize the
costs of incorrect decisions. The resulting weighting
function is an exponential function and takes the age
of information as an input to calculate the weighting
of that specific information. The weighting function
itself depends on the information-specific properties
information lifetime and false detection rate.
In the decision-making process, we perform a
weighted majority-voting with the weights calculated
by our weighting function. In the evaluation, we show
that our approach significantly outperforms compara-
ble approaches by up to 25% and dynamically adapts
to the information-specific properties.
As future work, we aim to investigate the possibi-
lities to filter out wrong information and consider the
individual false detection rate of each sensor instead
of the average into account to increase the quality of
the decisions further.
ACKNOWLEDGEMENTS
The work presented in this paper was partly funded by
the LOEWE initiative (Hessen, Germany) within the
NICER project and by the German Research Founda-
tion (DFG) as part of project C2 within the Collabo-
rative Research Center (CRC) 1053 - MAKI.
REFERENCES
Behrisch, M., Bieker, L., Erdmann, J., and Krajzewicz, D.
(2011). Sumo–simulation of urban mobility: an over-
view. In Proceedings of SIMUL 2011, The Third In-
ternational Conference on Advances in System Simu-
lation. ThinkMind.
Chae, M., Kim, J., Kim, H., and Ryu, H. (2002). Informa-
tion quality for mobile internet services: A theoretical
model with empirical validation. Electronic Markets,
12(1):38–46.
Delot, T., Cenerario, N., and Ilarri, S. (2008). Estimating
the relevance of information in inter-vehicle ad hoc
networks. In Mobile Data Management Workshops,
2008. MDMW 2008. Ninth International Conference
on, pages 151–158. IEEE.
Fawaz, K. and Artail, H. (2013). DCIM: Distributed ca-
che invalidation method for maintaining cache consis-
tency in wireless mobile networks. IEEE Transactions
on Mobile Computing, 12(4):680–693.
Hsiao, H.-C., Studer, A., Dubey, R., Shi, E., and Perrig, A.
(2011). Efficient and secure threshold-based event va-
lidation for vanets. In Proceedings of the fourth ACM
conference on Wireless network security, pages 163–
174. ACM.
Kakkasageri, M. and Manvi, S. (2014). Information mana-
gement in vehicular ad hoc networks: A review. Jour-
nal of Network and Computer Applications, 39:334–
350.
Kuppusamy, P. and Kalaavathi, B. (2012). Cluster based
data consistency for cooperative caching over partiti-
onable mobile adhoc network. American Journal of
Applied Sciences, 9:1307.
Meuser, T., Lieser, P., Nguyen, T. A. B., B
¨
ohnstedt, D., and
Steinmetz, R. (2017). Adaptive information aggrega-
tion for application-specific demands. In Proceedings
of the 1st BalkanCom.
Molina-Gil, J. M., Caballero-Gil, P., Hern
´
andez-Goya, C.,
and Caballero-Gil, C. (2010). Data aggregation for
information authentication in vanets. In Information
Assurance and Security (IAS), 2010 Sixth Internatio-
nal Conference on, pages 282–287. IEEE.
Richerzhagen, B., Stingl, D., R
¨
uckert, J., and Steinmetz,
R. (2015). Simonstrator: Simulation and prototy-
ping platform for distributed mobile applications. In
Proceedings of the 8th International Conference on
Simulation Tools and Techniques, SIMUTools ’15,
pages 99–108. ICST (Institute for Computer Scien-
ces, Social-Informatics and Telecommunications En-
gineering).
Wang, R. Y. and Strong, D. M. (1996). Beyond accuracy:
What data quality means to data consumer. Journal of
management information systems, 12:5–33.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
102
