
Virtual Learning Environment Design in the Context of Orientation
Skills Acquisition for LUSI Class
Lahcen Oubahssi and Claudine Piau-Toffolon
LIUM Laboratory, EA 4023, UBL, Le Mans University,
72085, Le Mans, France
Keywords: Virtual Learning Environments, Pedagogical Scenario, Educational Simulation, Orientation Skills.
Abstract: Virtual Reality (VR) is an interesting technology in the context of learning especially for learners with
learning disabilities. The design of virtual learning environments (VLEs) is a complex task due to the
interdisciplinarity intrinsic to VR and its cognitive aspects. This research work identifies some limitations
with existing solutions and studies the design and operationalization of learning situations in the form of
scenario models. It takes place in the context of LUSI (Learning Units for School Inclusion) classes and
involves a specific learning situation of acquisition of orientation skills. We propose a solution based on
virtual reality technology to enhance traditional learning and provide trainers with an educational toolkit,
thus allowing them to recreate virtual reality scenarios and assess the learners’ progress for learning
orientation skills.
1 INTRODUCTION
We present in this article a research work that took
part of the ARVAD project (ARVAD, 2017). The
aim of this project is to propose a solution based on
virtual reality to enhance the traditional learning to
acquire orientation skills in the LUSI (Local Units
for School Inclusion) classes. These units
accommodate pupils with cognitive or mental health
difficulties, with the main objective of schooling, the
development of adult autonomy and a sustainable
socio-professional integration in society. The daily
activity of orientation skills presents a real obstacle
for these learners. Different pedagogical approaches
are used: from learning how to read a map in class to
real orientation skills in an urban environment. As
part of this research project, we worked with the
LUSI class of twelve learners aged 16-18 (only nine
could participate to the experiment). Their major
difficulty is managing their stress, which can be
caused by several factors, including the crowd, the
noise, the delay of the bus, their own delay or the
forgetting of the transport card. Our objective is to
provide solutions to this problem of autonomy of the
orientation skills by using the techniques of virtual
reality.
For the learners of LUSI class, we distinguish
two types of disorders, cognitive (Lahav et al., 2002)
and psychosocial (ASH02, 2011) (De Gasparo and
Van Belleghel, 2012). From the point of view of
behaviour, they succeed in adapting to places; to the
people they meet by having the proper attitude. On
the other hand, they have no introspection activity
and they have major difficulty explaining why they
are doing this or that action. The identified cognitive
problems are located on four domains: memory,
sense of time, reasoning and the space notion. The
identified psychosocial problems are located on
three domains: attention, motivation and self-esteem.
Several research studies have studied the issues
related to the assessment and rehabilitation of these
disorders. (Sehaba and Hussaan, 2013) cited some
examples that are based on clinical tests, and deal
with different cognitive functions, such as working
memory (Diamond and Goldman-Rakic, 1989),
attention (Manly et al., 2001), auditory perception
(Mody et al., 1997), oral and written language
(Broomfield and Dodd, 2004).
The evolution of computer science has led to the
development of several digital solutions for
cognitive and linguistic remediation. (Botella et al.,
2000) (Campos et al., 2004) (Conde et al., 2009)
(Parfitt and Nguyen, 1998) (Sehaba et al., 2005)
(Sehaba and Hussaan, 2013) noted that these
Oubahssi, L. and Piau-Toffolon, C.
Virtual Learning Environment Design in the Context of Orientation Skills Acquisition for LUSI Class.
DOI: 10.5220/0006673800470058
In Proceedings of the 10th International Conference on Computer Supported Education (CSEDU 2018), pages 47-58
ISBN: 978-989-758-291-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
47

systems have the advantage of being more flexible
and easily accessible. However, most of these
systems do not adapt to the specificities and needs of
each user. The emergence of virtual reality in
computer sciences offers new experiences to users
along with more powerful interaction and immersion
possibilities. These possibilities are of great interest
in the learning domain because they allow the
creation of original and dynamic learning situations
detached from the constraints that can exist during
real training (danger, cost, uncertainty) and bringing
specific advantages (enrichment of situations,
replay, etc.) (Barot et al., 2013) (Barot et al., 2013)
(Carpentier and Lourdeau, 2014) (Lourdeaux et al.,
2002) (Mikropoulos and Natsis, 2011). All these
learning systems using virtual reality techniques can
be grouped under the acronym 3D-VLEs (Virtual
Learning Environments) (Fowler, 2014).
The research trends towards this type of
environment have an influence on the teachers’
practices and responsibilities in defining new
pedagogical strategies within this type of training
units. In our work, we address the issues of
designing and operationalizing pedagogical
situations enhanced by VR environments in an
engineering approach based on scenario models. We
aim at giving teachers the opportunity to freely
design computational scenarios by providing them
with tools dedicated to the design, reuse and
adaptation of each scenario to new pedagogical
situation if needed. The initial proposal of this
research effort has been discussed in (Chaabouni et
al., 2015) (Oubahssi et al., 2013) (Tadjine et al.,
2016).
This paper is structured as follows: the next
section will present related research works on virtual
reality and instructional design, we focus on
educational scenario model design. We present in
section 2 the context and objectives of our project
and the main stages of the design of the orientation
skills process. Our proposal is presented in section 3.
A discussion is made in section 4 on results of the
pilot study we carried out to verify the usability of
the developed environment (Nielsen, 1993). We
draw a conclusion and present our research
perspectives in the last section.
2 VIRTUAL REALITY AND
LEARNING SCENARIOS
The 3D-VLEs (Virtual Learning Environments) are
used in many domains including educational
settings. The VLEs design is a task that poses new
technical difficulties, induced by the
interdisciplinary intrinsic to the VR (graphic
computer, haptic devices, distribution, etc.) and
cognitive aspects (respect of the learned task
characteristics, transfer of learning to the real world,
etc.) (Bossard et al., 2008) (Marion et al., 2009)
(Sehaba and Hussaan, 2013). Therefore, the design
and integration of VLEs into learning are complex
and costly process. The description of the
pedagogical simulations must take into account the
specificities of this environment (its structure and its
dynamics) in order to describe precisely the
operationalization and the control of the activities in
the environment. We also note that the simple fact of
using virtual reality is not enough to motivate the
learners, just as aesthetic fidelity is not a guarantee
of pedagogical effectiveness. Tools by themselves
do not teach; appropriate theories and/or models to
guide the design and development of this technology
are needed (Chen, 2006). We might consider both
didactic situations and scenario model.
We analyzed the various research works that
studying the question of scenario model design in
VLEs. (Carpentier and Lourdeaux, 2014) and (Barot
et al. 2013) propose a model based on a centralized
and indirect control of an emergent simulation from
learning scenario content model. In this model, the
environment is populated with autonomous virtual
characters and the user is free from his/her actions.
Learning scenario design is realized in two steps:
dynamic objectives are determined from the user
activity, and then a learning scenario is generated by
these objectives and implemented through
simulation adjustments. (Trinh et al., 2010) proposed
models allowing the explicitation of knowledge for
agents that populate virtual environments. This
knowledge relates to the structure and the dynamic
of the environment as well as the procedures that
teams can perform. (Sehaba and Hussaan, 2013)
propose a serious adaptive game for the evaluation
and rehabilitation of cognitive disorders; their
system makes it possible to personalize the course of
games to each patient according to their capacities
and competences. The architecture of the system
organizes the knowledge in three layers: domain
concepts, pedagogical resources and game resources.
The main objective of this work is to reuse this
architecture in different fields of applications and
different serious games. (Marion et al. 2009)
propose a learning scenario model that describes
machine-readable educational activities in a virtual
environment, in a generic way in terms of learning
domain, type of task to carry out and learning
CSEDU 2018 - 10th International Conference on Computer Supported Education
48

strategy. The author uses a virtual environment
meta-model that provides an abstract representation
of virtual environments to allow its model to be both
generic and machine-readable. (Chen and Teh,
2013) propose an analysis that focuses on the
improvement of a pedagogical design model of
virtual environments using formative research. This
later model initially proposed by (Chen, Toh and
Wan, 2004), allows to formatively develop and to
evaluate simulations on a non-immersive virtual
system. The analysis produced a five-level model to
improve the pedagogical design of virtual
environment.
These research works overcome some limits
identified in (Carpentier and Lourdeaux, 2014) that
are related to the limited reactivity of the system or
pedagogical control of the adaptation approaches.
The models proposed improve the way to explicit
knowledge (Carpentier and Lourdeaux, 2014) (Trinh
et al. 2010) or the pedagogical design of virtual
environment (Chen and The, 2013) or permit the
personalization of the course (Sehaba and Hussaan,
2013). To overcome the lack of dynamic of the
pedagogical scenario design, some works
(Carpentier and Lourdeaux, 2014) (Trinh et al.,
2010) embed virtual agents in the virtual
environment. But these works still limit the use of
the virtual environment to predefined knowledge
and learning activities. In (Carpentier et al. 2014),
experts can enter their own model in a graphical
editor that relies on a formal representation directly
interpretable by computer systems. The meta-model
approach developed by (Marion et al. 2009) also
permits to experts to generate their virtual
environment. But, despite these interesting
approaches, they do not address in particular, the
problem of the definition and adaptation of scenario
models directly by the trainers according to the
pedagogical situations they might encounter.
Trainers can still not adapt by themselves the
pedagogical scenario according to the learner
profiles and enable a gradual learning process. Our
main concern is to propose solutions to trainers to
help representing scenario according to their own
pedagogical needs in new environments such as
those dedicated to virtual reality. As part of this
research, we study the design and operationalization
of several learning situations in a virtual reality
environment. We are particularly interested in
learning design activities by means of scenarios
models, by the teachers themselves, to enable them
to design learning situations in virtual reality
environments to ensure the achievement of their
educational objectives. Last but not least, it is
important to take note that the implementation of
these scenarios always requires an extra effort in
order to meet different technical and pedagogical
constraints required by this type of environment.
3 THE ARVAD PROJECT
3.1 Proposition of a Learning Scenario
Model
Financed by Agglomeration of Laval, the ARVAD
project was conducted in collaboration with the
INSH laboratory, the IEIAH (Technology Enhanced
Learning (TEL) Engineering research team) of the
LIUM laboratory and the Robert Buron High School
in Laval (France).
The aim of this research project is to propose a
solution implemented in virtual reality environment
to enhance the traditional learning to acquire
orientation skills in the LUSI classes. Our goal is to
facilitate this learning through digital, and to provide
trainers of the LUSI classes with an educational
toolkit, allowing them to recreate virtual reality
scenarios and to assess the learner’s progress. We
used a constructivist teaching approach based on
problem situations, and a virtual reality environment
to develop automation that can be latter exploited in
a context of orientation skill acquisition. The
challenge of this research project relies on the
interest of digital technologies in the learning for
young people with cognitive disabilities. As stated
by (Martin-Guttiérrez et al., 2017) younger students
have always lived surrounded with technologies and
are digital natives (Prensky, 2001) but relationships
between technology and learning are not evident and
virtual technologies are not an exception to this. But
an investigation by (Mikropoulos et al., 1998) found
that students had a favourable attitude towards these
technologies in the educational process. Studies in
the scientific literature linking virtual technologies
with improvements in particular in students’ social
and collaborative skills (Kaufman et al., 2005) and
students’ psychomotor and cognitive skills (Feng,
Duh and Billinghurst, 2008) permit us to suppose
that the use of tablets, smartphones or video games
in their daily life, and the attraction they show for all
these devices suggest that virtual technologies can
be beneficial for both learning and autonomy
development.
In order to achieve our objectives, we adopt an
iterative and participative approach: analysing and
modelling existing learning situations, developing a
functional demonstrator and testing the usability and
Virtual Learning Environment Design in the Context of Orientation Skills Acquisition for LUSI Class
49
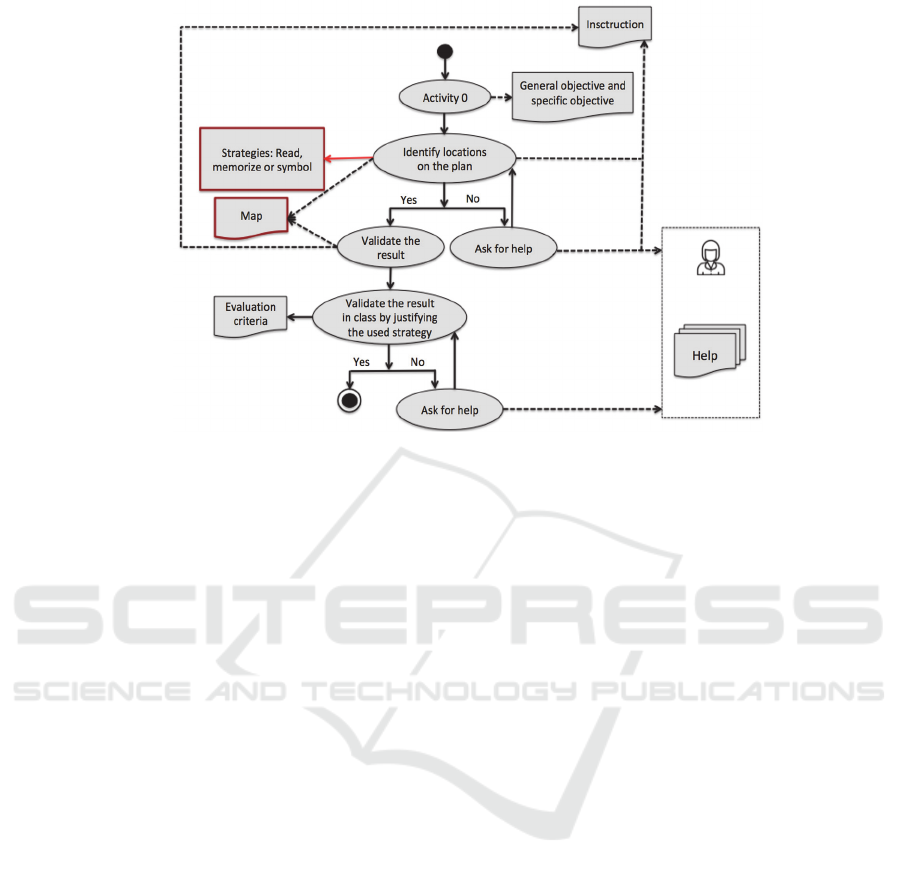
Figure 1: High School Category – Progress of activity 1 (Table 1).
relevance of the demonstrator in real situations.
Users took part of the design process and allowed
the design of the prototype to evolve at each
iteration. During the analysis phase, we tested the
technical acceptance of virtual reality environments
through the manipulation by the LUSI class learners
of two well-known 3D video games based on
displacement situations using a joystick. This test
proved that learners were very comfortable with
these environments and associated peripherals. In
order to define the practices and put them into
perspective with the theories and methods of
learning adapted to the target audience, we observed
for a period of three months in the LUSI class the
different pedagogical situations. Based on this study,
we proposed pedagogical models to be implemented
in the future virtual environment.
These models may offer the possibility to
trainers to define their own scenarios according to
the learner’s profile and the pedagogical situation
3.2 Example of a Learning Scenario
The learners of the LUSI class are asked to carry out
various educational activities related to orientation
skills so that they could develop more autonomy in
their personal and professional lives. While doing
so, an observation is being made on a number of
activities, as illustrated in Table 1. The activities
being carried out can be characterized with different
variables and parameters characterising in
accordance with the needs of the teaching staff of
the LUSI class. For instance, an activity “work stress
management” can be adjusted with the variation of
the level of stress by adding “noise” as parameter
(Table 2). Thanks to the observation process, we are
able to propose a version of a model of scenarios (as
illustrated in Fig.1), which leads us to propose a
conceptual model of different pedagogical scenarios
based on the needs of the referring teacher. Fig. 1
illustrates the course of the learning situation related
to Activity 1, beginning with Activity 0 (Table 1).
The objective of this activity is to locate different
places on a map. The pedagogical strategy being
used in this example is to work individually, and
afterwards collectively for the correction.
Thus far, we note that, the main characteristic of the
given scenarios is that they are adaptable to the
learners' progress (suggesting an itinerary to be
followed first with visual and / or audible indications
or without indication, adding noises from
environments, etc.). In the suggested scenarios, the
general objective of having learners move
independently while managing stress with a map and
benchmarks in the environment is fulfilled. In the
meantime, we have identified several intermediate
objectives that allow for a gradual learning towards
this general objective (Fig. 2). Each intermediate
objective is composed of a pedagogical sequence,
which is divided into activities. The sequences are
independent of one another because they do not
respond to the same intermediate objectives.
CSEDU 2018 - 10th International Conference on Computer Supported Education
50
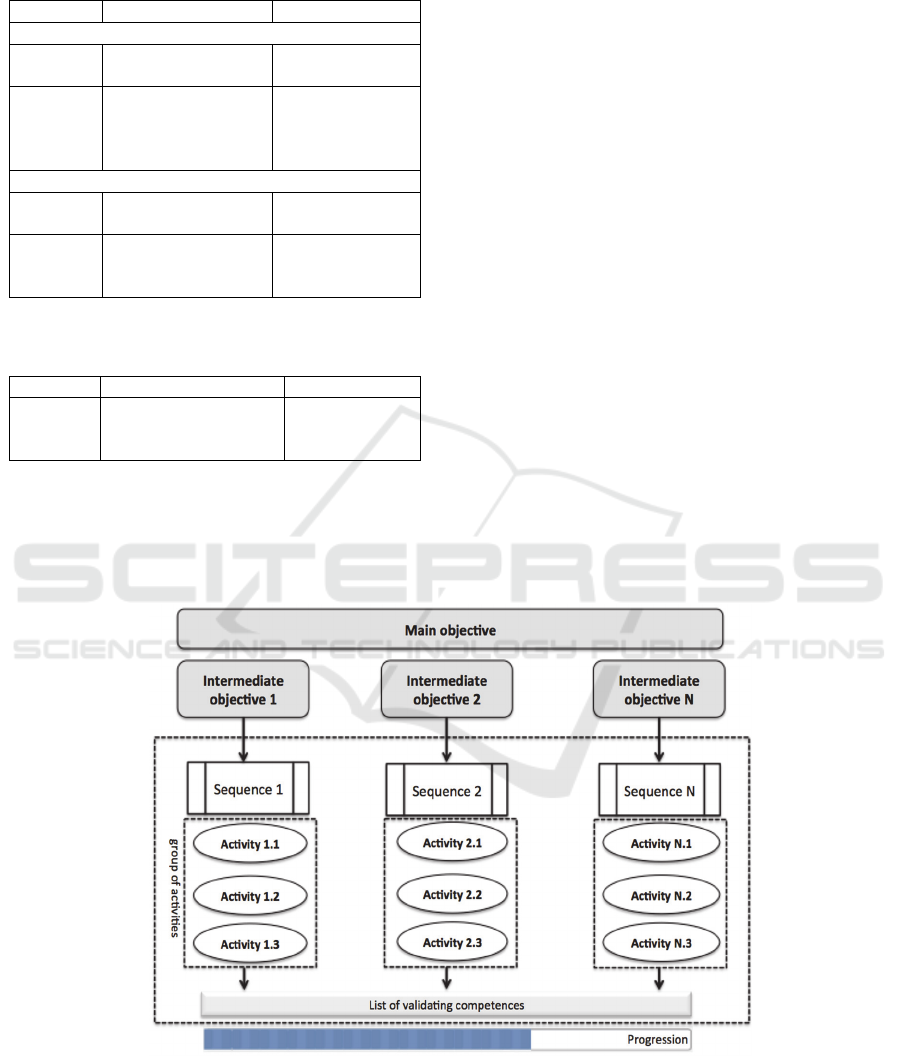
Table 1: Extract of the various orientation skills activities
achieved in LUSI class.
Activities Objectives Variables
High School Category
Act.1 Locate places in
hi
g
h school
Type of maps
Act.2 Identify places in
high school (with
colours)
No variable, only
the map with
many indices is
use
d
City Category
Act.1 Locate on a city
ma
p
No variable
Act.2 Locate important
places with a grid
Search strategy
with imposed
g
ri
d
Table 2: Example of variables in orientation skills
activities.
Noise Timer Obstacle
With/
Without
Display (Yes/No)
Duration
(
Limited/Unlimited
)
Present/Absent
The set of these sequences constitutes a group of
activities. The teacher assigns a specific sequence to
one or more learners depending on their competency
levels on orientation skills. In our study, we
distinguish two groupings of learners according to
two competence levels:
Group 1: is the grouping of learners with a low
level of competence on orientation skills. For
example, group 1 always starts activities with a
simplified map because they have difficulty
moving on a complex map (with a lot of path
choices).
Group 2: is the grouping of learners with an
average level of competence on orientation
skills. For example, group 2 always begins
activities with a complex map because we
consider that they are able to move with a
simple map.
We found that for the same objective, the teacher
does not evaluate the same competency. For the
same objective, the same activity may be used,
but with lower or higher level of requirements
according to the handicap and education level. For
the same objective, activities of different (gradual)
levels may be used.
To evaluate the learner progress, a scale is used by
the teacher according to the academic evaluation
system (acquired, being acquired, almost acquired,
not acquired). This makes it possible to locate them
in relation to their competence booklet. Fig. 3
illustrates an example of a learner's pedagogical path
with the different adaptations (change of activities,
adaptation of objectives, etc.).
Figure 2: Progress of Activity 1 (Table 1).
Virtual Learning Environment Design in the Context of Orientation Skills Acquisition for LUSI Class
51
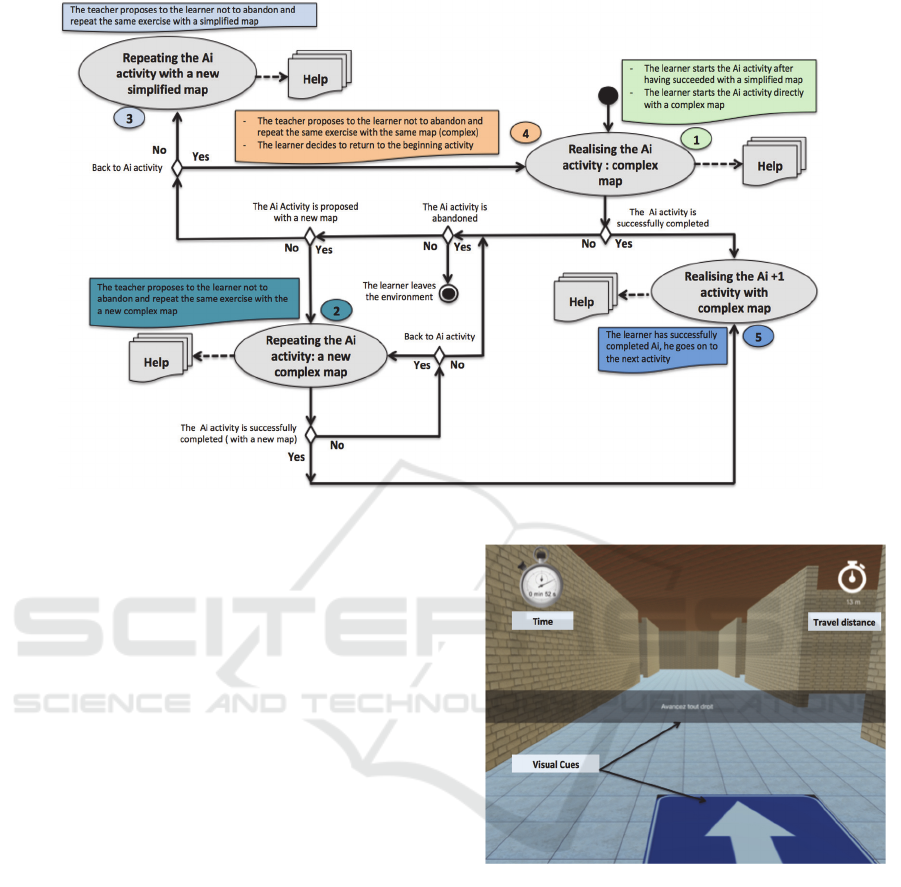
Figure 3: The progression of a learning path with a complex map.
3.3 The 3D Environment
Following this analysis and modelling of existing
pedagogical situations, we proposed a set of
specifications summarizing the main one of a virtual
reality environment to adapt specified needs and
scenarios. This allowed the development of a virtual
environment enabling the pedagogical team to
define orientation skills scenarios and learners to
carry out the activities related to the objectives set.
For these activities, the learner has a joystick, a
synchronized tablet displaying a 2D map, and visual
indices (images or texts) (Fig. 4). We developed a
non-immersive virtual reality environment in the
form of a window into a virtual world displayed on a
computer monitor and the interaction made via a
mouse or a joystick.
To set up the orientation skills activities, the teacher
uses a configuration interface communicating with
the ARVAD execution environment. This interface
permits:
Management and configuration of the travel
plans;
Management of learners or group of learners, set
up of activities according to learning profile and
pedagogical progression;
Analysis of the results of the activities achieved;
Management of the learner's accounts.
Figure 4: 3D Environment Screenshot.
As shown in Fig. 5, the ARVAD execution
environment uses a model of orientation skills
scenario and the 3D environment (a labyrinth). A
server is dedicated to the management of data and
resources. An instance of the 3D orientation skills
scenario model is generated through the setting up
of the activities generating a scenario for a learner
or a group of learners.
The environment includes two main parts. The
first one is dedicated to the learner, playing the
scenario defined by the trainers. The second part
(not developed at this time) will allow the teacher to
set pedagogical scenarios according to the learner's
CSEDU 2018 - 10th International Conference on Computer Supported Education
52
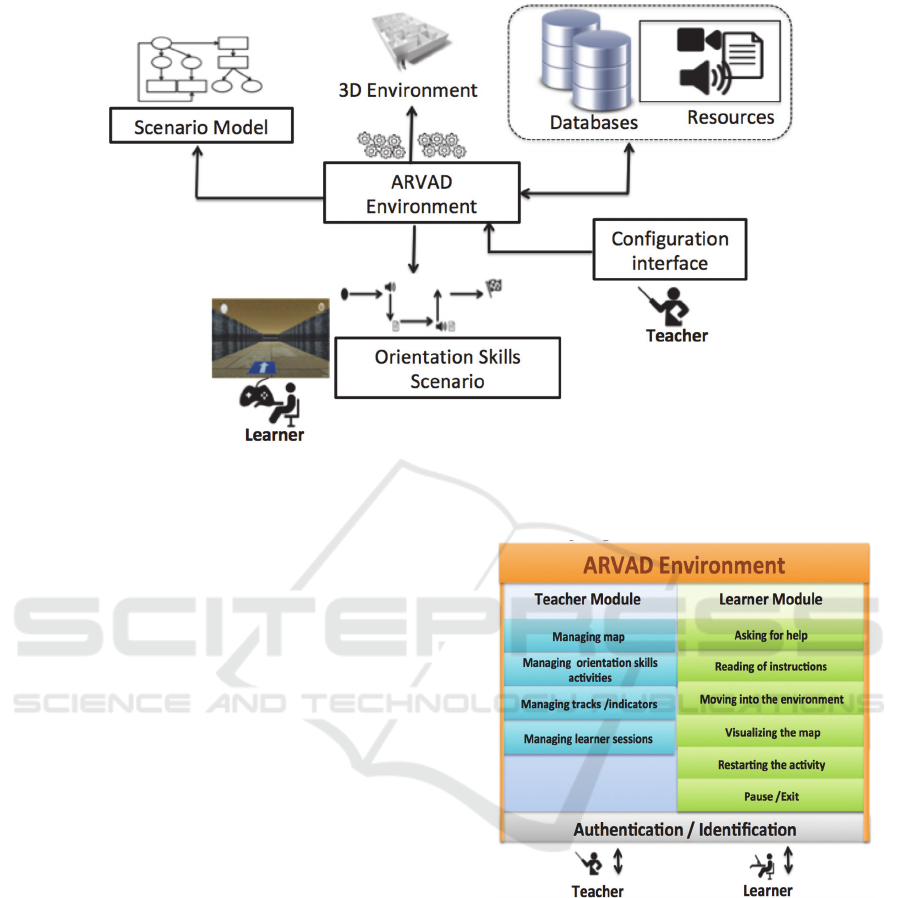
Figure 5: ARVAD Software Architecture.
profiles and their pedagogical progression and save
the results to track the progress of these learners.
The virtual environment has been developed with
the cross-platform game engine Unity as a desktop
version, where the user navigates using a joystick,
related to a tablet. The design of the scenes did not
try to provide authentic situations but only one close
to the reality. Data of the various games play by
each learner are recorded in databases.
Fig. 6 depicts the software architecture of the
ARVAD environment. It is composed of two
functionalities modules, a teacher’s module and a
learner’s module.
The teacher module is composed of the following
functionalities:
Mapping map:
Permits to
set up or to
associate a map to an orientation skills
activity.
Managing orientation skills activities:
Permits to c
reate to set or to delete an
orientation skills activity. Teacher can
generate new orientation skills scenario.
Managing tracks/indicators:
Permits to
visualize the different activities achieved by
learners or group of learners for a period of
time selected. Some indicators may be:
date, learner code, number of activities
achieved by a learner, distance travelled (by
activity), success or not of an activity. The
teacher can export the results.
Managing learner sessions:
Permits to
c
reate, to modify or to remove a learner
profile, and to define activities for learners
or group of learners.
Figure 6: The two main parts of the ARVAD
Environment.
The learner module is composed of the following
functionalities:
Asking for help:
Permits to the learner to
access to the help at any moment in the game by
clicking. Different types of aid are given
according to the teachers’ settings.
Reading of the instructions:
To achieve the
activity, the learner can hear or read the
indication (according to the teachers’ settings).
Moving into the environment:
Permits to
achieve the activity. The learner uses the
joystick to move around in the environment.
Virtual Learning Environment Design in the Context of Orientation Skills Acquisition for LUSI Class
53
Visualizing the map: Permits to the learner
to visualize his/her orientation plan and
gets his position in the environment.
Restarting the activity: Permits to the
learner to restart his activity from the
beginning. The last attempt is recorded.
Pause/Exit: Permits to the learner to take a
break at any moment. This pause is not
taken into account when the activity is
timed.
4 PILOT STUDY
4.1 User Story
This pilot study was realized with nine learners
(aged between 15 and 18) from the LUSI class at the
Laval Robert Buron high school, France. With the
pedagogical team, we organized the learners into
two groups according to the abilities and skills of
each one. Table 3 shows an overview of the profiles
of each group.
Table 3: Learner’s group profile of the pilot study.
Grou
p
Size Ca
p
acities and Skills
1 4 Difficult access to reading or very
difficult understanding of
instructions. Use of
p
icto
g
rams.
2
5 Easy access to write and
understand a sim
p
le instruction
We conducted the pilot study in order to assess
the feasibility and the usability of the proposed
system. We defined a set of objectives to evaluate if
the functionalities and modalities of interactions
(Table 4):
Are well adapted to the LUSI classes learners;
Allow one or more skills to be easily worked;
Allow one or more skills to be easily evaluated.
The scope of the experiment does not still permit to
evaluate the effectiveness of the pedagogical
approach.
Table 4: List of the pilot study objectives.
O1 The learner gets to locate easily on the map
(tablet)
O2 The learner is able to move easily in the
virtual environment
O3 The learner can easily visualize the indices
(
ima
g
e,
p
icto
g
ram
)
O4 The learner manages to make the global link
between the tablet and the virtual
environment
05 The learner is able to move with visual aid in
the virtual environment
O6 The learner is able to make the link between
the positioning in the 3D environment and the
positioning on the tablet (know how to
im
p
lement
)
4.2 Method and Protocol
The aim of the pilot study is to evaluate qualitatively
the feasibility of the pedagogical approach and some
aspects of the usability of the virtual environment.
We empirically verify usability criteria of the
environment such as learnability, efficiency,
memorability, errors or satisfaction (Nielsen, 1993).
According to the model of (Dillon and Morris, 1996)
we evaluate the concept of attitude, mainly the
concept of perception of the user. To do so, we
observed how the perception of content on the
screen (visibility, display, texture) was perceptible,
the perception of the contents on the shelf and the
link between the tablet and the main screen. We
defined a protocol based on two learning groups
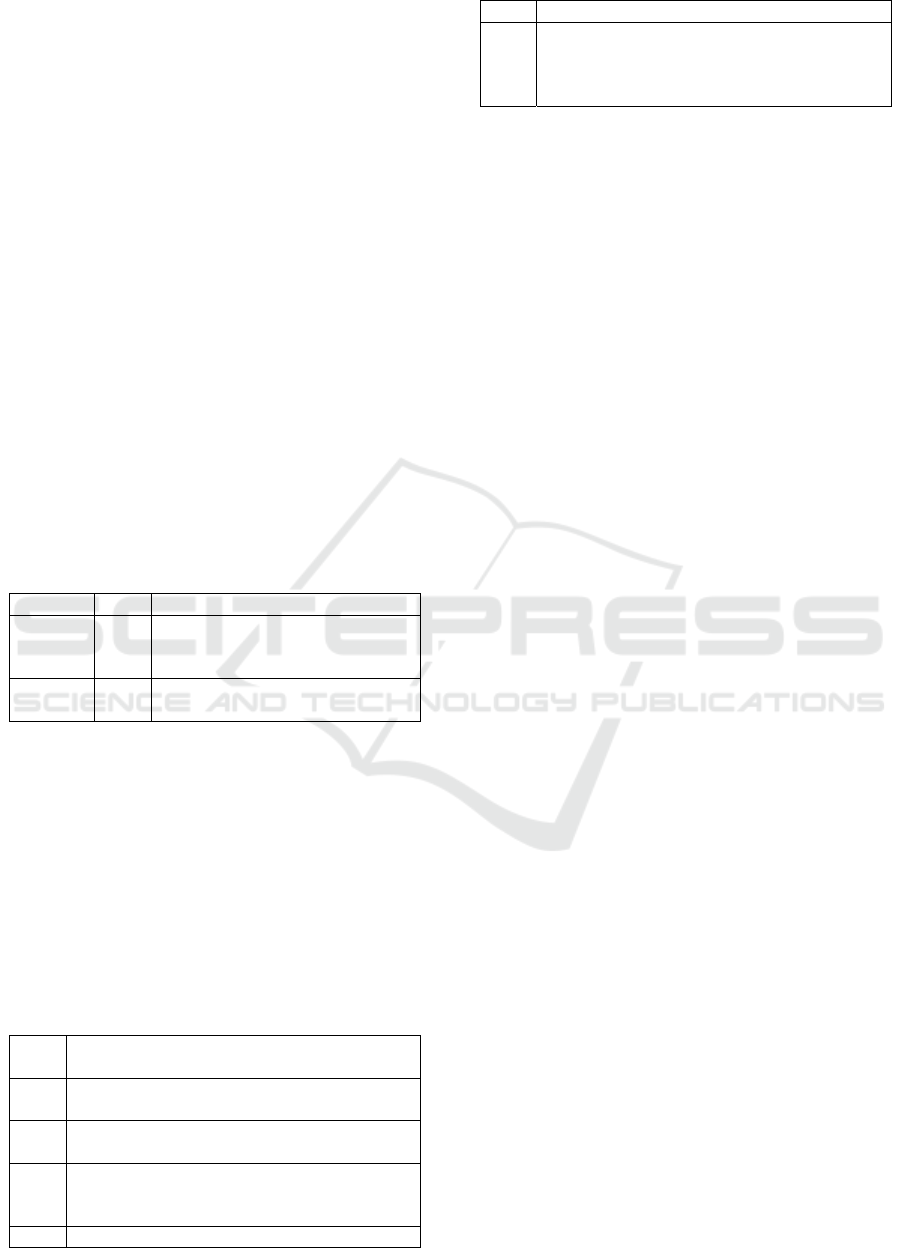
(Group 1 and 2) and four steps: pre-test, test, post-
test and results analysis. Fig. 7 proposes an activity
diagram of the pilot study process.
During the first step, the pedagogical team organized
learners in two groups (Table 3), prepared an
orientation map (on paper), the activities to be
realized (duration, objective) and defined evaluation
criteria (according to the skills to be tested for each
group). The teacher then worked the orientation
activity with the learners of the two groups (paper
based map). For the post-test phase, an evaluation
grid has been developed by researchers and a
questionnaire for learners according to the
experiment objectives to evaluate the virtual
environment during the learner’s activities (Table 4).
The map and the learning game scenario model were
operationalized on the tablet and in the prototype of
the virtual environment. In the second step (test),
each group of learners plays their learning game
scenario in the virtual environment. During each
game session, the research team observes the
learners' activities and notes their observations on
the evaluation grid. For each objective (Table 4) we
evaluate if the learner was able to achieve it. In the
third step, the researchers submit a questionnaire to
the two groups of learners. The objective of this
questionnaire is to have a learner’s feedback on the
realised activities. The questionnaire was submitted
by oral and the research team recorded answers.
Finally, in a last step, the researchers conducted an
analysis of the results and defined the improvements
elements to the virtual environment.
CSEDU 2018 - 10th International Conference on Computer Supported Education
54
During the test step, each group realized 3 sets of
scenarios of the same activity (moving from point A
to point B) but with a different variant depending on
the group (with visual aid for Group 1 and with
textual indications in Group 2). The skills to be
evaluated were not the same for the two groups.
Figure 7: Activity Diagram of the Pilot Study Process.
For example, among the skills to be assessed for
Group 1, we can cite:
I know how to go from a point A to a point B on
the tablet map without indices.
I know how to go from a point A to a point B
using the visual aid in the virtual environment.
Each learner was asked individually to study the
map on a tablet, which is the reproduction of the one
that was played in class. Then he/she explains what
he/she should do, before realizing his/her activities
in the virtual environment. At any moment they
could get help (by asking directly to the project team
members conducting the experiment) or by clicking
with the joystick to spot on the map of the tablet
where they were located in the environment. The
time (in seconds) and distance covered (in meters)
were recorded in order to evaluate the efficiency
according to the mode of use.
Three series of displacement (scenarios) per
learner were proposed (Table 5). The project team
monitored the process, observed the learner's
activities and questioned the learner at the end of the
session on the basis of the planned questionnaire and
noted observations on the evaluation grid.
Table 5: Displacement series for the two groups of
learners.
Series Description
1 Same departure and arrival point of the
p
aper map
2 A new departure and arrival point with
indications
3 A new departure and arrival point without
indications
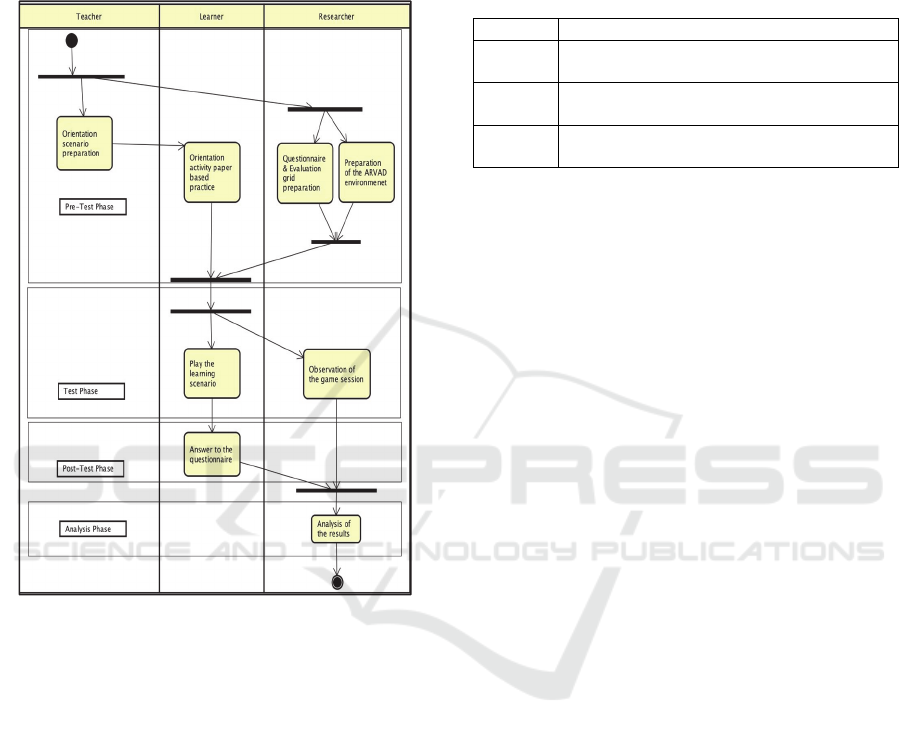
4.3 Results and Discussions
The analysis of the results from the post-test
questionnaire submitted to the learners and the
evaluation grid completed during the test (results
presented for Group 1 in Table 6, Table 7 and Fig. 8,
Fig. 9), made it possible to verify some of the
usability criteria. The feasibility of the approach was
validated as learners of the two groups were able to
move in the virtual environment and achieved a
series of activities (no abandonment). Only one
learner (learner 4) unfamiliar with the joystick had
some difficulties during the series (can be observed
through the travel time recorded). They were all able
to easily locate themselves on the map in the tablet
(tracing the requested itinerary). Objectives O1 to
O3 in Table 4 were satisfied. Some of them had
more difficulties to understand and use the link
between the tablet and the virtual environment (O4,
O6 in Table 4, Table 7). Those who did not use the
link with the tablet and the help proposed (by
clicking with the joystick), randomly explored the
environment for the first attempt in search of the
arrival point. Then they used their memory to locate
objects to achieve the series of displacement, thus
the time taken to complete the activity or the
covered distance in the two first series was greater,
in a ratio of 1 to 3 for the time in the case of learner
4 of the Group 1.
The time taken to complete the activity and the
covered distance was variable according to the
learners without being directly linked to the different
types of help proposed. Objective O5 seems more
difficult to achieve. We still noted in series 3
(changed start and arrival points - no indices
provided in the virtual environment) that time and
covered distance was greater for the two groups (see
results Table 6, Fig. 8, Fig.9 for Group 1- except for
learner 2 and 4). We observed that Learner 2 used
Virtual Learning Environment Design in the Context of Orientation Skills Acquisition for LUSI Class
55
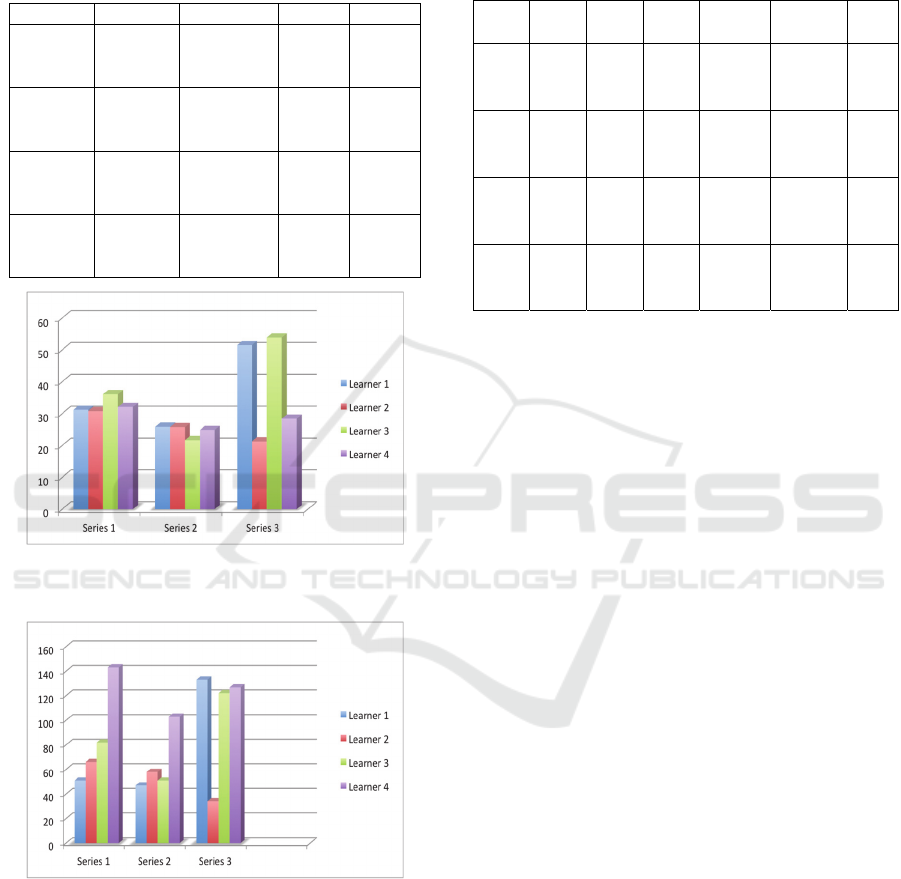
systematically the aid provided in the environment
but the results (in terms of distance and time) were
not better than the others (except for the last series).
Table 6: Results of Group 1.
Learner Activit
y
Distance Time Hel
p
1 1
2
3
31.2
25.9
51.5
51
47
133
0
0
2
2 1
2
3
30.8
25.8
21.3
66
58
34
5
5
6
3 1
2
3
36.1
21.7
53.9
82
51
122
0
0
1
4 1
2
3
32.1
24.9
28.4
143
103
127
0
0
0
Figure 8: Results of Group 1: Distance travelled (in
meters).
Figure 9: Results of Group1: Time of travel (in seconds).
The first two series permit to verify the usability of
the prototype and the skill (I know how to go from a
point A to a point B using the visual aid in the
virtual environment). In the last series, despite
change with the points of departure and arrival, the
indices permit the learners to locate themselves in
the environment. Learners used more internal skills
instead of exploiting the link between the map on the
tablet and the environment. Group 2 presented
results rather similar as Group 1.
Table 7: Results of Group 1 by objectives for each series
of activities.
Lea
rner
Seri
es
O1 O2
O3 O4/O6 O7
1
1
2
3
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
A few
Ok
No
Ok
Ok
Ok
-
2
1
2
3
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
-
3
1
2
3
Ok
Ok
Ok
Ok
Ok
Ok
Ok
Ok
No
No
No
A few
Ok
Ok
-
4 1
2
3
Ok
Ok
O
k
Ok
Ok
O
k
Ok
Ok
O
k
No
A few
A few
Ok
Ok
-
5 CONCLUSION AND
PERSPECTIVES
VLEs based on virtual reality techniques proved to
be efficient in learning but some limits have been
identified, as they do not always permit teachers to
adapt the learning situation to the learner’s paths.
The aim of this work was to propose a learning
environment exploiting virtual reality and scenario-
based models that could be adapted by teachers to
learning situations in the context of learners with
cognitive disabilities. We have developed our own
environment rather than reusing existing
environments that would have provided better visual
feedback but would not have allowed us to develop
our adaptable scenario models. The solution
produced is authentic but in a simplified reality that
can be complicated according to the learner’s
learning profile and promotes repetition which is an
important learning spring for this learner audience.
The effort to provide operationalization (machine-
readable model) still remains semi-automatic to
deploy a new scenario, the teacher having to
parameterize variables in text files. The
experimentation based on qualitative evaluation
validated the feasibility and usability of the
pedagogical approach implemented in the virtual
environment. The main improvements relate to the
teacher part, to permit the adaptation of learning
scenario to the learners and enable their monitoring.
It remains to develop an editor that will facilitate the
design or simple parameterization of scenarios in
different environments (simple labyrinths or city in
CSEDU 2018 - 10th International Conference on Computer Supported Education
56

3D) and the follow-up of the different paths by the
teachers and in a reflexive way by the learners
(applicable to several environments, regardless of
the domain or type of simulation to be played).
Future experiments should evaluate interfaces and
usability on the part of the teacher and the
effectiveness of pedagogical approach. We will also
need to address the follow-up of learners and the
adaptation of scenarios by teachers according to
profiles and learning situations.
ACKNOWLEDGEMENTS
This work was funded by Agglomeration-Laval
(France). We want to thank all partners of this
project. We would also like to thank especially the
learners and teachers for their full support and key
contributions: the Laval Robert Buron high school,
France.
REFERENCES
ARVAD,. 2017. Project Web site. http://www-lium.univ-
lemans.fr/~oubahssi/ARVAD/
ASH02., 2011. Troubles des fonctions cognitives – pistes
pédagogiques. Enseigner - Aux élèves en situation de
handicap - En unité d'enseignement -
http://ash.ia02.ac-
amiens.fr/IMG/article_PDF/Troubles-des-fonctions-
cognitives-pistes-pdagogiques_a220.pdf.
Barot, C., Lourdeaux, D., Lenne, D., 2013. Using planning
to predict and influence autonomous agents behaviour
in a virtual environment for training. In Cognitive
Informatics & Cognitive Computing (ICCI*CC), 2013,
12th IEEE International Conference . pp. 274-281.
Barot, C., Lourdeaux, D., Burkhardt, J-M., Amokrane, K.,
Lenne, D., 2013. V3S : A Virtual Environment for
Risk-Management Training Based on Human-Activity
Models. In Presence, Teleoperators and Virtual
Environments, 22(1) :1–19.
Bossard, C., Kermarrec, G., Buche, C., Tisseau, J., 2018.
Transfer of learning in virtual environments : a new
challenge ?. In Virtual Reality September 2008,
Volume 12, Issue 3, pp 151–161 Virtual Reality...
Botella, C., Banos, R., Villa, H., Perpina, C.,
Garciapalacios, A., 2000. Virtual reality in the
treatment of claustrophobic fear: A controlled,
multiple-baseline design. Behavior Therapy, vol.31,
2000, pp. 583-595.
Broomfield, J., Dodd, B., 2004. Children with speech and
language disability: caseload characteristics. In
International Journal of Language & Communication
Disorders, 39 3: 303-324. 2004.
Campos, E., Granados, A., Jiménez, S., Garrido, J., 2004.
Tutor Informatico: Increasing the Selfteaching in
Down Syndrome People, Computers Helping People
with Special Needs, 2004, pp. 629–629.
Carpentier, K., Lourdeaux, D., 2014. Generation of
learning situations according to the learner’s profile
within a virtual environment. In Agents and Artificial
Intelligence, number 449 in Communications in
Computer and Information Science, 2014, pp. 245–
260.
Chaabouni, M., Piau-Toffolon, C., Laroussi, M., Choquet,
C., 2015. Indexing learning scenarios by the most
adapted contexts : An approach based on the
observation of scenario progress in session. In the 15th
IEEE International Conference on Advanced Learning
Technologies – ICALT 2015, Hualien (Taiwan), pp.39-
43, 6-9 July 2015.
Chen, C. J., Toh, S. C., Wan, M. F., 2004. The theoretical
framework for designing desktop virtual reality-based
learning environments. Journal of Interactive
Learning Research , 15 (2), 2004, pp.147-167.
Chen C. J., 2006. The design, development and evaluation
of a virtual reality based learning environment.
Australasian Journal of Educational Technology,
2006, 22(1), pp. 39-63.
Chen, C.J ., Teh, C.S ., 2013. Enhancing an instructional
design model for virtual reality based learning.
Australasian Journal of Educational Technology.
Conde, A., De Ipiña, K., Larrañaga, M., Garay-Vitoria, N.,
Irigoyen, E., Ezeiza, A., Rubio J., 2009.
LAGUNTXO: a rule-based intelligent tutoring system
oriented to people with intellectual disabilities. In:
Lytras M.D. et al. (eds) Visioning and Engineering the
Knowledge Society. A Web Science Perspective. WSKS
2009. Lecture Notes in Computer Science, vol 5736.
Springer, Berlin, Heidelberg
De Gasparo, S., Van Belleghel, L., 2012. L’ergonomie
face aux nouveaux troubles du travail: le retour du
sujet dans l’intervention, in Hubault (coord.). Actes du
séminaire de Paris 1 du 11, 12 et 13 juin 2012.
Persistances et évolutions : les nouveaux contours de
l’ergonomie. Toulouse, Octarès.
Diamond, A., Goldman-Rakic, P.S., 1989. Comparison of
human infants and rhesus monkeys on Piagets AB
task: Evidence for dependence on dorsolateral
prefrontal cortex. Experimental Brain Research, vol.
74, 1989, pp. 24–40.
Dillon, A., Morris, M.; 1996. User acceptance of
information technology : theories and models. Annual
Review of Information Science and Technology, 1996,
pp. 3-32.
Feng, Z., Duh, H. B.L., Billinghurst, M., 2008. Trends in
augmented reality tracking, interaction and display: A
review of ten years of ISMAR. In the7th IEEE/ACM
international symposium on mixed and augmented
reality (ISMAR), 2008, Cambridge, UK. doi:
10.1109/ISMAR.2008.4637362.
Fowler, C., 2014. Virtual Reality and Learning: Where is
the Pedagogy?. British Journal of Educational
Technology, 46, 2, 2014.
Gutiérrez, J. M., Domínguez, M. G., González, C. R.,
2015. Using 3D Virtual Technologies to Train Spatial
Virtual Learning Environment Design in the Context of Orientation Skills Acquisition for LUSI Class
57

Skills. in Engineering. International Journal of
Engineering Education 31(1), 323-334.
Kaufmann, H., Steinbugl, K., Dunser, A. Gluck, J., 2005.
General training of spatial abilities by geometry
education in augmented reality. Cyberpsychology &
Behavior, 2005, 8(4), 330.
Lahav, O., Mioduser, D., 2002. Multisensory virtual
environment for supporting blind persons’ acquisition
of spatial cognitive mapping, orientation, and mobility
skills.. In Proceedings of the 4th Conf Disability,
Virtual Reality & Assoc. Tech., Veszprém, Hungary,
pp 213-220
Lourdeaux, D., Fuchs, P., Burkhardt, J-M, Bernard, F.,
2002. Relevance of an intelligent tutorial agent for
virtual reality training systems. Int. Journal of
Continuous Engineering and Life-Long Learning,
2002, 2 (1-4), pp. 214 - 230.
Manly, T., Anderson, V., Nimmo-Smith, I., 2001. The
differential assessment of children attention: The Test
of Everyday Attention for Children (TEA-Ch),
normative sample and ADHD performance. Journal of
Child Psychology and Psychiatry, vol. 42, Nov. 2001,
pp. 1065-1081.
Margaryan, A., Littlejohn, A., Vojt, G., 2010. Are digital
natives a myth or reality? University students’ use of
digital technologies. Computers & Education, 2011,
56, pp. 429-440..
Marion, N., Querrec, R., Chevaillier, P., 2009. Integrating
knowledge from virtual reality environments to
learning scenario models-A meta-modeling approach.
INSTICC International conference of Computer
Supported Education, 2009, pp. 254–259.
Martín-Gutiérrez, J., Mora, CE., Añorbe-Díaz, B.,
González-Marrero A., 2017. Virtual Technologies
Trends in Education. Eurasia Journal of Mathematics,
Science and Technology Education. 2017;13(2):469-
86. doi: 10.12973/eurasia.2017.00626a.
Mikropoulos, T., Chalkidis, A., Katskikis, A., Emvalotis,
A., 1998. Students’attitudes towards educational
virtual environments. Education and Information
Technologies, 1998, 3(2), pp. 137-148.
Mikropoulos, T.A., Natsis, A., 2011. Educational virtual
environments: A ten-year review of empirical research
(1999-2009). Computers & Education, 56 (2011), pp.
769-780.
Mody, M., Studdert-Kennedy, M., Brady, S., 1997.
Speech perception deficits in poor readers: auditory
processing or phonological coding?. Journal of
experimental child psychology, vol. 64, Feb. 1997, pp.
199-231.
Nielsen, J., 1993. Usability Engineering. The book,
Boston, Academic Press.
Oubahssi, L., Piau-Toffolon, C., Clayer, J.P., Kammoun,
F., 2013. Design and operationalization of patterns:
Case of a training situation of personal assistance for
public in professional integration. Int. Conf. on
Software Technologies (ICSOFT 2013),
Reykjavik(iceland), 29-31 July 2013, p.488-495.
Parfitt, L., Jo, J., Nguyen, A., 1998. Multimedia in
Distance Learning for Tertiary Students With Special
Needs. ASCILITE, Australasian Society for Computers
in Learning in Tary Education, 1998, pp. 561–569.
Prensky, M., 2001. Digital Natives, Digital Immigrants.
On the Horizon, 2001, 9(5), pp. 1–6.
doi:10.1108/10748120110424816.
Sehaba, K., Estraillier, P., Lambert, D., 2005. Interactive
Educational Games for Autistic Children with Agent-
Based System. 4
th
International Conference on
Entertainment Computing (ICEC’05), number 3711 in
Lecture Notes in Computer Science (LNCS), pp. 422–
432, Springer. September 2005, Sanda, Japan.
Sehaba, K., Hussaan, A.M., 2013. Adaptive serious game
for the re-education of cognitive disorders. AMSE
Journals, Advances in modeling, series Modelling C
(Special issue on Handicap) 73(3): 148-159.
Tadjine, Z., Oubahssi, L., Piau-Toffolon, C., Iksal, S.,
2016. A process using ontology to automate the
operationalization of pattern-based learning scenarios.
Scientific Book Chapter In Communications in
Computer and Information Science (CCIS), edited by
Springer-Verlag, 2016, pp. 444-461.
Trinh, T.-H., Querrec, R., Loor, P. D., Chevaillier, P.,
2010. Ensuring semantic spatial constraints in virtual
environments using UML/OCL. In VRST’2010 Proc.
of the ACM symposium on Virtual reality software and
technology, 2010, pp. 219-226.
CSEDU 2018 - 10th International Conference on Computer Supported Education
58
