
Gamification of EcoDriving Behaviours through
Intelligent Management of Dynamic Car and Driver
Information
Nousias Stavros
1
, Aris S. Lalos
1
, Christos Tselios
1
, Dimitris Bitzas
1
,
Dimitris Amaxilatis
2
, Ioannis Chatzigiannakis
3
, Arvanitis Gerasimos
1
,
and Konstantinos Moustakas
1
1
University of Patras, Department of Electrical Engineering, Greece
2
Sparkworks ITC Ltd, U.K.
3
Sapienza University of Rome, Italy
Abstract. Driving style is seen not only to become a significant cause of green-
house gas (GHG) and other air pollutant emissions but also a critical parameter
regarding road safety, with huge social & financial adverse effects. In this work
we provide a conceptual architecture of a highly innovative and interactive Seri-
ous Games platform that will empower and guide users to adopt an eco-friendly
driving style. This will be achieved, without distracting users from safe driv-
ing, through a multidisciplinary approach aiming at the development of a user
friendly, unobtrusive multi-player gaming environment, where the users will not
only play collaboratively/competitively using their mobile device but also using
the car itself and their own bodies, thus turning eco-driving into an immersive and
highly motivating experience. The sensing infrastructure of the proposed system
will not only acquire data related to driving from an OBD sensor that will capture
a complex set of parameters related to eco-driving, but will also sense environ-
mental and physiological parameters of the driver, so as to better position the state
of the system (car) in context (environment, user). The use of virtual user mod-
els and cognitive modeling of the users, will further boost personalization and
adaptation of the game itself with respect to the needs of the individual driver.
The impact of such a holistic and innovative approach is huge and the founda-
tions laid here are expected to result in a widespread adoption of sensor-based
gamification platforms in areas going far beyond eco-driving
Keywords: Gamification · Ecodriving · Augmented reality · Virtual reality
1 Introduction
Road transport is one of the major causes of the environmental pollution. According to
a recent study [4] it is responsible for about 30% on the total emissions of CO2 into
the atmosphere. Among the actions individuals can take to reduce their green-house
gases associated with personal transportation, there is to operate their current vehicles
more efficiently [7]. Recent studies [5] have shown that in certain situations the driver’s
driving style can result in differences in terms of fuel consumption (and therefore CO2
emissions) from 2 up to 35% between a calm driver and an aggressive one [58]. One
100
Stavros, N., Lalos, A., Tselios, C., Bitzas, D., Amaxilatis, D., Chatzigiannakis, I., Gerasimos, A. and Moustakas, K.
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information.
DOI: 10.5220/0008862301000123
In OPPORTUNITIES AND CHALLENGES for European Projects (EPS Portugal 2017/2018 2017), pages 100-123
ISBN: 978-989-758-361-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

important action to reduce the environmental impact caused by road transport is there-
fore to educate drivers to adopt a driving style that is as eco-friendly as possible. At this
point, it should be also mentioned that numerous studies have underlined the substan-
tial ecological [34], economic but, also, road safety adverse benefits that can be derived
from adopting eco-driving behaviors [7, 38]. Road traffic injuries are a major public
health problem in the WHO European Region and cause the premature deaths of some
120 000 people every year, they are the leading cause of death in children and young
adults aged 5 to 29 years. In addition to these deaths, about 2.4 million people are es-
timated to be so seriously injured as to require hospital admission each year. Although
there are several potential causes of traffic crashes, and the injury severity sustained in
the crashes, a leading cause is aggressive driving. Driving style is influenced by a com-
plex mixture of technical, social, psychological [31] and cultural factors, with the latter
tending to have a greater influence than the former: How a driver reacts to a given situ-
ation is more likely to be influenced by factors such as his age, values, social position,
concentration, stress and attitude to risk, than by traffic regulations or the driver’s ability
to use the vehicle controls [46]. It is more a question of attitude than ability. To change
their driving behavior, car drivers have to change their automated behavior into delib-
erately controlled behaviour – a process that requires considerable effort. More impor-
tantly, car drivers need to be motivated to change their behavior [32] (i.e., they need to
form an intention [31] to practice eco-driving), and second, they have to put this inten-
tion into practice. Many studies have report cultural, technical, and educational barriers
inhibiting its adoption. Recent studies [18] also found that eco-driving behaviours are
related to time saving and safety goals, therefore, can be easily violated in demanding
traffic environments or in time pressure situations. The most important educational ele-
ment in changing driver behavior is the positive feedback from taking the desired action.
Behavioral theory strongly confirms that unless the individual can see or feel the results
of his/her actions—preferably on an immediate and continuous basis—that individual
is unlikely to maintain the behavior over time. Therefore, as eco-driving results are so
small, unless personalized feedback on the collective effort is provided, the driver is
unlikely to perceive important changes in his driving style affecting the fuel economy
and the society in general. To this end, innovative strategies that will increase driver
motivation to make changes in their driving behaviour are required. Serious gaming
and Gamification has been positioned as a powerful approach, tool, or set of techniques
that guides targeted behaviour change to improve the way that various activities are un-
dertaken so that those involved begin to take the desired actions while they experience
more fun, enjoyment, and pleasure in their tasks [47]. The gamification term refers to
a designed behaviour shift through playful experiences and became popular in 2010
and dominates especially areas with human interaction and focus on the quality of the
experience since then [42]. However, in order to effectively motivate users to adopt de-
sired behaviors, the games should provide information so that the users themselves will
be able to evaluate their behaviour and increase their awareness on the negative conse-
quences that it may have. In this context, we aim to develop highly innovative and Inter-
active Serious Game Platform that will motivate users to adopt an eco-friendly driving
style without distracting them from safe driving. The developed playful interventions
will be adapted to the user characteristics through an intelligent unobtrusive sensing
101
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
101

platform that will utilize late-breaking personalized user models so as to optimize the
individuals driving behaviour shift through playful experiences that will take place in
the real world and real-time rather than in a virtual/ simulation environment, which is
the current state-of-the art in eco-driving education. Our major objective is to provide a
highly innovative and interactive Serious Games platform, named GamECAR, empow-
ering drivers to manage their driving behavior by: i) conveying educational messages,
ii) encouraging certain activities through game-based elements such as competition or
rewards and iii) providing them with user friendly tools that will increase their aware-
ness of their ecodriving state and effectiveness of the intervention strategies. Critically,
the proposed system is expected to guide users to adopt an eco-friendly driving style,
without distracting them from safe driving, through a multidisciplinary approach aim-
ing at the development of a user friendly, unobtrusive multi-player gaming environment,
where the users will not only play collaboratively/competitively using their mobile de-
vice but also using the car itself and their own bodies, thus turning eco-driving into an
immersive and highly motivating experience. A pipeline of advanced algorithms and
data fusion techniques starting from raw measurement processing, feature extraction,
EcoDriving indicators and personal profile data will ensure EcoDriving state awareness
and a timely optimal intervention strategy will be provided using the digital gaming
technology. In addition, a ”personal driving guidance system” will empower drivers
to optimize their action plans towards personalized preset goals and guidelines (e.g.,
maintain speed, switch off engine when stationary, shift up to low revs, etc). Finally the
system will provide to the user i) Serious Games (including Augmented Reality (AR)
games) responsible for monitoring driving behavior & delivering action personalized
plans that will help user to maintain a green driving style without distracting them from
safe driving and ii) a multiplayer gaming environment where users can monitor their
ecodriving score evolution, set missions and invite other to participate collaboratively
or competitively. The rest of the paper is organized as follows, in section 2 we give
an overview of the existing eco-driving assisting systems, in section 3 we analyze the
details of our approach and finally in section 4 we end with discussion, conclusion and
future direction related to this topic.
2 Related Work
The current ecodriving systems can be divided into two major categories: i) the eco-
driving real life applications and ii) the simulators. The most representative approaches
available in the market are shortly described in the rest part of this section.
2.1 Ecodriving Mobile Applications and Driving Assistance Systems
Smartphone Applications: Studies have shown that eco-driving smartphone applications
have impact on fuel efficiency (Tulusan et al., 2012). Greenmeter[43], FuelGood [54],
TEXACARe [53] and Geco [40] are good examples of smartphone applications that
have been developed in order to track fuel consumption and increase efficiency. Some
of them works in real time since others provide a summary at the end of each jour-
ney. TEXACARe and Geco provide a score based on actions that have impact in fuel
102
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
102

consumption and driver’s behavior Remote Control Solution: WeNow [59] is a solution
mainly aimed at vehicle fleets and aids them in increasing their overall fuel efficiency.
The device of the platform is connected to the OBD II interface of the vehicle in or-
der to be able to collect the relevant vehicle data such as mileage, fuel consumption,
etc. Advanced Driver-Assistance Systems: FIAT
R
eco:DRIVE APP [24], Ford Smart
Eco Driving [25], BMW Eco Pro[10], Honda
R
Insight Eco Assist system [27], Nis-
san Eco-Drive Support Technology, Subaru Ecology [49] and Mitsubishi ECO Drive
Support [36] are fully implemented systems. Some of them are based on apps that com-
municate directly with the car which purpose is to improve the driving style, lowering
fuel consumption and tracking the carbon dioxide emissions. Others are build-in sys-
tems providing feedback in real-time for maximizing the fuel efficiency. Finally, one
approach acts as a medium between driver’s actions and car’s engine inputs to avoid
non-eco behaviors, although the system turns this functionality off in cases of emer-
gency. traction (e.i. driving at dusk, on slippery surfaces, snowy environments etc.). In
this simulator, ecodriving is just an extra feature.
2.2 Ecodriving Simulators & Games
This section presents three simulators (ST Software Simulator Systems with EcoDriv-
ing Package, DriveSim and Simescar Silver – Simumak) and four games (EcoDriver,
Stagecoach, Truck Fuel Eco Driving and SafetyDrivingSimulator: Car) that focus on
teaching principles of EcoDriving to drivers. ST Software Simulator Systems Eco Driv-
ing Package [51]: The simulator teaches how to save up to 20% or 30% of fuel by
applying another style of driving. It offers a way of experiencing a new driving style
arising from being mindful about fuel consumption. The simulator focuses on both the
financial and environmental gain obtained from this driving style.
DriveSim simulator [21]: The simulation program DriveSim allows the driver to
practice as if he/she were commanding a real vehicle, thanks to its realistic situations
and environment. DriveSim scenarios include real traffic and pedestrians. This program
offers the possibility of doing different tours with any climatic settings, timing and
traction: driving at dusk, on slippery surfaces, snowy environments, with rain or even
practice emergency braking with and without ABS. DriveSim provides the opportunity
for initial training on track, overtaking practice, driving on urban roads, service roads,
roundabouts and efficient driving, among many other options. EcoDriver [22] tests the
players driving in an endless, randomly generated environment, in an attempt to demon-
strate the advantages of driving safely, economically and in an environmentally friendly
way to the player. Players must master a dangerous terrain and treacherous traffic sit-
uations, all the while saving fuel and being aware of the situation on the road. Truck
Fuel Eco Driving: This game places the player behind the driving wheel of a Renault
Premium Optifuel, in order to let them discover the principles of economic driving.
Different challenges in urban environments and secondary road networks are posed, in
which the player needs to obtain the lowest fuel consumption possible and the highest
commercial speed possible.
Table 1 depicts existing worldwide competing technology or products in this market
place. Most of the available solutions simply provide educational messages without
taking into account specific characteristics of the individual driver. In addition none
103
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
103
Table 1. Related projects and competitive products.
GamECAR
Greenmeter
Garmin Mechanic with
ecoRoute
TM
HD
FIAT eco:DRIVE APP
CarbonDiem
FuelGood
Honda Insight Eco
Assist system
EcoDrive One
Speedometer
Simulators (e.g. ST
Software Simulator
systems Eco driving
package , etc. . . )
Games (e.g.
EcoDriver,stagecoach
,Truck Fuel eco driving)
Driver behavior
sensing
3 3 3 3 3 3 3 3 7 7
Proper vehicle
maintenance
3 7 3 7 7 7 7 7 7 7
Mixture of
social status,
financial status
parameters
3 7 7 7 7 7 7 7 7 7
Environmental
sensing
3 7 7 7 7 7 7 7 7 7
Physiological
data
3 7 7 7 7 7 7 7 7 7
Direct
feedback while
driving
3 3 3 7 3 3 3 3 7 7
Indirect
feedback
3 7 7 3 3 3 3 3 7 7
Education and
feedback
support
3 7 7 3 7 3 3 7 7 7
User models 3 7 7 7 7 7 7 7 7 7
Customized
personalized
Interventions
3 7 7 7 7 3 7 7 7 7
Interactive
Serious Games
3 7 7 7 7 7 7 7 7 7
Information
visualization
3 3 3 3 3 3 3 3 7 7
Customized
information
visualization
3 3 3 7 3 3 7 3 7 7
Driver
Community
Platform
3 7 7 3 7 7 7 7 7 7
Multiplayer
game support
3 7 7 3 7 7 7 7 7 3
Vendor
GamECAR
HUNTER
GARMIN
FIAT
CarbonDiem
Energy Saving Trust
HONDA
JoyNow!
Various vendors
Various vendors
104
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
104

of them guides targeted behaviour change to improve the way that various ecodriving
activities are undertaken so that those involved begin to take the desired actions in order
to adopt a more efficient driving style.
3 GamECAR Approach and Methodology
An ecodriving coaching solution needs to realize the difficulty of trying to change be-
havioral patterns that have been internalized over years and should try to take account
of a driver’s social and cultural preconceptions. For example, it will be hard to encour-
age a driver to let the car coast in neutral if he or she believes that this is forbidden or
wrong. And it will be hard to encourage a driver to shift up early whilst applying mod-
erate gas pedal if he thinks this combination might strain an engine or waste fuel. In
addition, unlike private car drivers who respond well to financial incentives for adopt-
ing sustainable driving behavior, corporate drivers are not financially motivated, as their
fuel costs are reimbursed by their employer. Therefore, a coaching solution needs to be
aware of the driver’s reservations in order to address them head on, for example, by
explaining that regardless of the accelerator pedal position, a modern engine will not
inject excess fuel. A powerful approach, that have been proved very effective in guiding
targeted behaviour change to improve the way that various activities are undertaken is
gamification. GamECAR aims to better understand and change the driving behavior and
its relation to a complex mixture of technical, social, psychological and cultural factors
by using the Gamification approach. The proposed system aims to provide both direct
and indirect feedback in a playful manner to the driver, through user specific Interactive
Serious Games that will not distract him/her from safe driving. The distraction moni-
toring is based on physiological measurements (e.g., heart rate, respiration rate, etc.).
It will strengthen the driver’s motivation of adopting an ecodriving style through the
delivery of personalized feedback, monitoring driving inattention, guidance and educa-
tion. Through user specific interventions, ecodriving game aims to define an ecodriving
score. The score is initially constructed from prior knowledge on the field and then
globally updated based on analysis of long-term observations of all drivers’ states. This
update will be then applied to the individual user models, modifying them accordingly,
to fit different needs per driver.
The developed interactive Serious Games platform will empower and guide users to
adopt an eco-friendly driving style. This will be achieved, without distracting users from
safe driving, through a multidisciplinary approachaiming at the development of a user
friendly, unobtrusive multi-player gaming environment, where the users will not only
play collaboratively/competitively using their mobile device but also using the car itself
and their own bodies, thus turning eco-driving into an immersive and highly motivating
experience. The sensing infrastructure of GamECAR, shown in Figure 2 and 1 will not
only acquire data related to driving from an OBD sensor that will capture a complex set
of parameters related to ecodriving, but will also sense environmental and physiological
parameters of the driver, so as to better position the state of the system (car) in context
(environment, user). The use of virtual user models and cognitive modeling of the users,
will further boost personalization and adaptation of the game itself with respect to the
needs of the individual driver.
105
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
105

3.1 GamECAR Architecture
As far as the architectural view is concerned, GamECAR platform consists of various
components, depicted in Figure 1, which are described as follows: Car Sensor Network:
It consists of the wearable wireless body area sensors and an OBD II sensor, designed to
continuously monitor vehicle characteristics, driving style and a cluster of physiological
parameters while driving. This car sensor network (CSN), records several parameters
such as heart rate and respiration rate, which are used to monitor driver inattention
and in order to estimate correlations with the driving style. Mobile Device/Gateway:
The CSN system will be connected to the Mobile device (e.g., Mobile phone, Tablet),
which will send the data to the Streaming Data Sub-System. This sub-system is initially
responsible for fusing the streaming data to the Mobile Device/Gateway wirelessly via
Bluetooth, to enable the Real Time Analysis component, where the handling of risk
situations is conducted with the use of real-time data mining techniques. The Streaming
Data Sub-System also sends data for storage to CSN. Real time analysis conducted in
Streaming Data Sub-System, will inter-connect with the AR GAME, so as to produce
warnings to drivers in case of danger. It will also interact with the VUM, to update it
in case of risk. Offline Analysis Server: It consists of a central server infrastructure that
is responsible for Offline Analysis of data and communication with a remote Database,
that will be mainly used for scientific analysis and VUM handling. Data from Real
Time Analysis conducted in Streaming Data Sub-System will be transmitted once a day
through the Internet to the Offline Analysis Server, to aid offline analysis. In the Offline
Analysis Server, tests for ecodriving assessment will be carried out, in the direction
of a formal ecodriving indicator, reflecting changes in driving styles through the long-
term adjustment of the VUM. The adjustment parameters as well as the results will be
transmitted to the Remote DB, for storage and feedback to the offline analysis, as well
as to the VUM, through data fusion. Data fusion will be carried out under a Big Data
analysis scenario, taking into account the VUM adjustments in case of risk in CSN,
hence the VUM and data fusion interaction. Additionally, all data obtained from the
Streaming Data Sub-System will be stored in the remote DB, to capture driver current
status and correlate it to his/her driving behavior history, and combine it with the already
fused VUM data to construct a long-term frailty monitoring system. Intervention Sub-
System: Implements the Interactive Serious Games supporting AR rendering, interacts
with the Offline Analysis Server module, but through the aforementioned offline-online
data broadcasting, will also be able to comprise short-term events. This sub-system
will receive input from the remote EcoDriving assessment implemented in the Offline
Analysis Server, to produce driving style recommendations and vehicle maintenance
plans to older vehicles. These changes will then be communicated back to the offline
system, in order to reach the VUM, and also be stored for EcoDriving score evaluation.
3.2 Data Analysis
Towards assessing driver’s behavior and driving performance, a large amount of data
need to be sampled, transmitted, stored and processed. Sensor devices often failure
to provide continuous data streamings, due to transmission errors, threshold errors, or
106
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
106
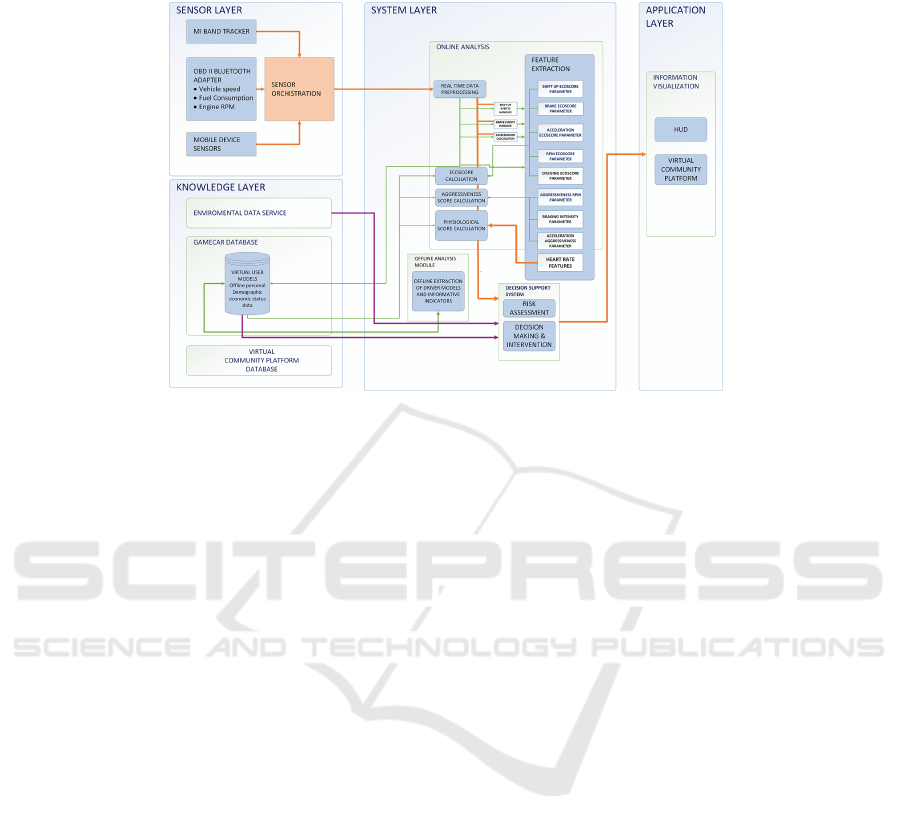
Fig. 1. GamECAR system architecture.
generic system failures. To provide reliable inferences, further data processing is re-
quired, which provides more solid results when is based on continuous values without
missing entries and other type of abnormalities. Possible data inconsistencies and other
anomalies need to be identified while applying data mining techniques is an essential
step towards the extraction of ecodriving performance indicators and driving style clas-
sification.
The three main input sources of the project are focused on (i) the vehicle, (ii) the en-
vironment and (iii) the driver, acquiring and analysing all relevant data available to con-
struct a complete and personalized profile for each instance. The data is then passed to
the EcoDriving assistance module, which comprises of three sub-modules, responsible
for feedback generation, game elements and information visualization. Functionalities
of the online data analysis and offline data analysis are also presented, along with their
general design directives and features. These include real time information about 1) Ac-
tive transmission gear 2) Intake air temperature 3) Engine coolant and oil temperature
4) Fuel type, consumption and tank level 5) Throttle position 6) Engine revolutions per
minute (RPM) 7) Calculated engine load 8) Vehicle speed 9) Emission requirements to
which the vehicle was designed
all particularly relevant towards constructing and maintaining a multi-fold and ac-
curate model for the driver, which is appropriately parameterized according to his/her
vehicle. It is important that these data should be further normalized to account for sev-
eral varying parameters, such as road type and traffic, weather conditions, etc. Most of
this information is readily available from relevant cloud services. The main purpose of
this post processing is to prohibit factors beyond driver’s control affect the evaluation of
his/her Eco friendliness. This is important for conveying a sense of fairness to the partic-
ipating drivers/players, which in turn preserves engagement and motivation in the long
run. Apart from vehicular and environmental data, the monitoring of the driver per se,
via indicative biosignals can be proven crucial in forming an accurate profile of not only
107
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
107

driving behaviour under certain circumstances, but also of broader personality traits in
long-term frames. GamECAR is going to utilize common wearables which provide real
time measurements for heart rate, respiration rate and muscle activity. This type of data
is highly correlated to the driver’s psychological state, and are parsed together with the
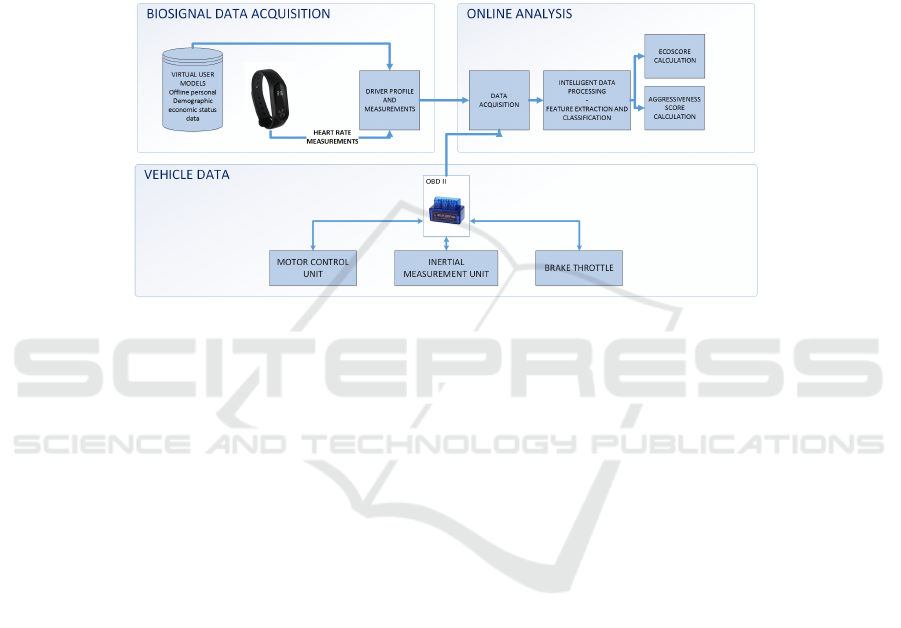
vehicle data to the EcoDriving assistance module. An overall presentation of the online
analysis dataflow is presented in Figure 2
Data Preprocessing. As global telecommunication market shifts towards the 5G era
and the fascinating technological advances it proclaims [9, 55], it becomes obvious that
new applications and verticals with a tremendous affect in our everyday lives are ap-
proaching. The deployment of a highly heterogeneous, always available, brisk and agile
network, offering inherent support for billions of interconnected devices with less than
1 millisecond end-to-end latency [6], will transform almost every application from sim-
ple daily entertainment to autonomous private transportation. The automotive domain is
somehow divided into two separate yet highly consolidating tracks, autonomous driving
vehicles (ADV) [56] and vehicle-to-everything (V2X) communication [57], with V2X
act as a key technology enabler for ADV by allowing moving vehicles to approach each
other more safely, thus enabling traffic flow optimization techniques and increased sit-
uational awareness. Vehicle-oriented notifications and alerts are propagated to nearby
infrastructure, properly equipped pedestrians or other vehicles, rendering every involv-
ing entity capable of reacting fast and efficiently regardless of the situation [26] for
instance, to the now hazardous cases of blind intersections, closed curves, lane switch-
ing and overtaking which often cause fatal car accidents worldwide. Smart Cities all
around the globe are deploying dedicated infrastructure, partially based on resource
savvy architectures such as Multi-Access Edge Computing (MEC) or Fog Computing
[6, 1] paradigms, for facilitating V2X communication in a seamless manner, since cit-
izen security and effective public/private transportation are considered top priorities.
However, one of the keys to efficient and secure V2X communication applications is
the ability to deliver informative messages, even based on partially fragmented datasets.
Recently, novel signal processing tools such as matrix completion (MC) have been
widely adopted for mitigating similar effects in many research fields such as computer
vision [60] or signal reconstruction from partial observations. Their strong benefit is
that they ensure exact reconstruction of a low rank matrix given a sufficient number of
observations [13, 11]. Several modifications of the classical MC problem allowed the
application in undirected graphs [28] and subsequently in 3D models[57]. Furthermore,
[12] presented the recovery of signals from a sampling of its Fourier spectrum via ma-
trix completion. In this section, motivated by the necessity for fault tolerant systems
that will extract information from incomplete datasets, as well as the omnipresent de-
mand of limited data transfer through the congested Smart City networks, we present
an efficient and low cost method of managing non-uniformities and uncertainties in
vehicle-related data. Capitalizing on the low-rank property of the generated matrices
compiled by partitioning and stacking timeseries data, we formulate an approach that
offers higher reconstruction quality as compared to the traditional MC approach, at fast
execution times. More specifically, the contributions of the proposed work [39] can
be summarized on the following points: 1) Formulation of a Laplacian based matrix
108
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
108
completion to cope with missing entries in timeseries 2) Establishment of an efficient
approach to deal with computational complexity of the issue under investigation This
solution will allows us to retrieve adequately detailed information from smaller or com-
promised datasets through an algebraic interpolation process that intends to effectively
fill the missing information gaps without changing the overall essence of the actual
dataset. Depending on the use case, the proposed solution could be used for analyt-
ics retrieved from artificially reconstructed data or simply as a method of lowering the
threshold of the necessary amount of data needed for a specific decision.
Fig. 2. Online analysis datastream.
Extraction of Informative Indicators. For obtaining all available data from the driver,
the vehicle and the surrounding environment of each driving session, a dedicated net-
work of sensors was utilized. More specifically, the driver may wear (i) the Xiaomi
MiBand 1S tracker which provides heart rate information, (ii) the Polar H7 band also
for recording heart rate signals and (iii) the Spire Stone respirator which measures the
expansion and contraction of the individuals’ torso and categorizes its breath as calm,
tense or focused. An OBD II Bluetooth adapter is attached to the car’s parallel port,
transmitting vehicle-related data such as speed, fuel consumption, engine RPM and
throttle position to a paired mobile device, wirelessly, using Bluetooth communication
protocol. On the aforementioned mobile device runs a custom Android application in
charge of (i) collecting all wirelessly transmitted data traces from both the wearables
and the OBD, (ii) obtain enviromental data related to weather, traffic and road con-
dition from third-party online repositories, (iii) recording additional data from all its
embedded sensors, such as 3D acceleration, geolocation data and timestamps, (iv) ag-
gregate all data into one dataset before transmitting them to an online repository for
further analysis and long-term storage, the GamECAR Database. The application also
includes a real-time data preprocessing module which applies several algorithmic tech-
niques to the accumulated data, as well as a feature extraction module responsible for
identifying high level features and detect events while driving. Such events may involve
shift up and braking or changes in the vehicle’s acceleration and the driver’s heart rate.
These extracted features are the direct input of the physiological score calculation mod-
ule and are also cross-correlated with metrics retrieved from the GamECAR Database.
109
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
109
Provided that the GamECAR database contains analyzed data for each user, the phys-
iological score integrates historical, preprocessed and real-time data, thus providing a
holistic overview of an individual’s behaviour on the road.
Parameters for the Ecoscore Estimation. Based on state of the art gamification ap-
proaches [16], the ecoscore aims to penalize high RPM values during gear shift-up
and cruising, abrupt braking, high acceleration. In the same direction, the aggressive-
ness score aims to penalize high lateral acceleration, abrupt braking and high variances
in throttle position and RPM. Ecoscore is a driving style indicator, namely a tool that
shows drivers’ ECO driving performance and, consequently, their efficiency during their
trips. By analyzing the driving behavior, individual drivers can dramatically improve
their driving style. In this way, we take into account the main parameters which can
negatively affect the ecoscore. The used formula for the estimation of the ecoscore aims
to penalize high RPM values during gear shift-up and cruising, abrupt braking and high
acceleration. Specifically, for the calculation of the ecoscore the following parameters
are used:
1) Shift ups RPM ecoscore parameter 2) Brake ecoscore parameter 3) Acceleration
ecoscore parameter 4) RPM ecoscore parameter 5) Cruising ecoscore parameter
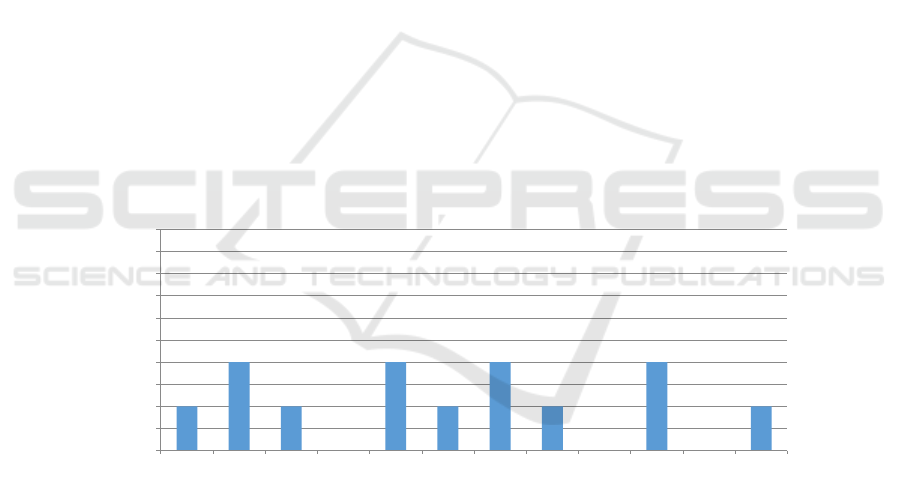
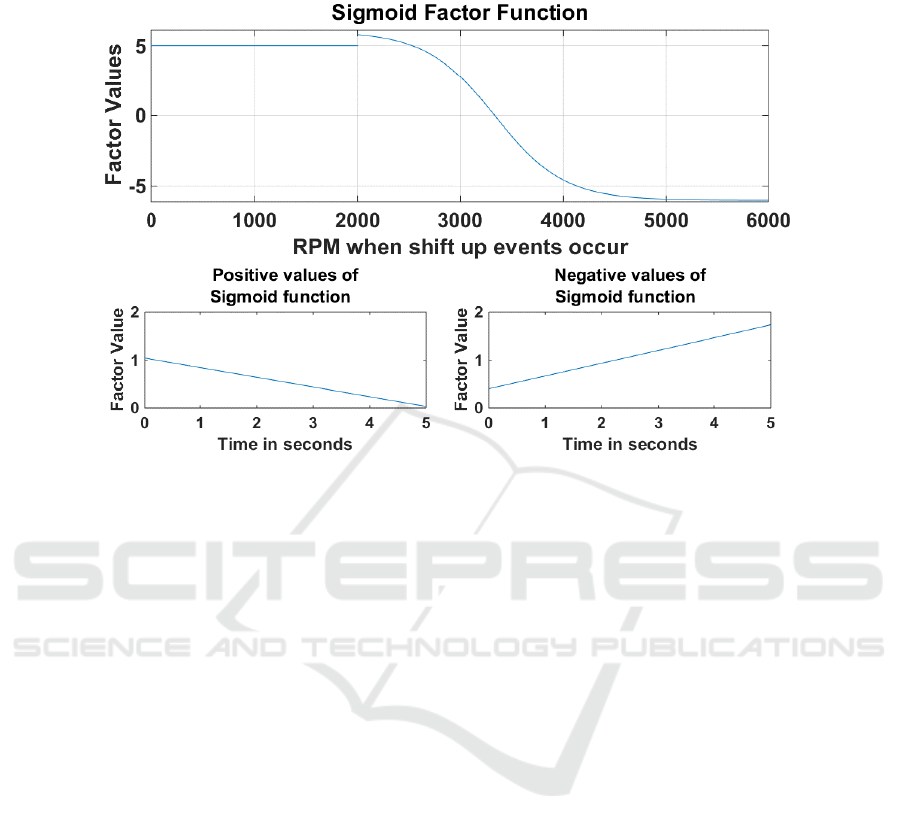
The shift up RPM ecoscore parameter describes the evaluation of shift-up events as
a factor to calculate ecoscore. The general idea is to punish shift up events with RPM
values higher than 2500 and reward shift up events with RPM values between 2000-
2500. In Figure 3, an example is presented showing how the RPM is affected when a
”gear shift up” event happens. The reward is less if the driver shifted up after several
seconds above 2000 rpm. Fig. 4 shows that the duration of a shift up event has an impact
27/06/2018 Milan, 14-15 Nov. 2017 30
1
2
1
0
2
1
2
1
0
2
0
1
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0-2000 2000-2100 2100-2200 2200-2300 2300-2400 2400-2500 2500-2600 2600-2700 2700-2800 2800-2900 2900-3000 3000-6000
Shift ups
RPM when shift up categories
RPM Histogram
Fig. 3. RPM and gear shift up events.
and specifically different impact for positive and negative factor values. The punishment
is more when the duration is several seconds after 2000 rpm. For the estimation of shift
up RPM ecoscore we use: (i) the peak RPM during the event, (ii) the time required to
complete a shift-up event, (iii) the vehicle speed, (iv) the mean vehicle speed, (v) the
mean throttle position, (vi) the speed variance and (vii) the throttle variance.
The brake ecoscore parameter describes the evaluation of break events as a factor
to calculate ecoscore. For the calculation of brake ecoscore parameter, we are looking
110
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
110
27/06/2018 Milan, 14-15 Nov. 2017 31
Fig. 4. Shift up events and different impact for positive and negative factor values.
for brake events which are divided into four categories: (i) soft engine brake, (ii) hard
engine brake, (iii) pedal brake and (iv) emergency brake.
The acceleration ecoscore parameter describes the evaluation of acceleration events
as a factor to calculate ecoscore. The acceleration ecoscore parameter estimation mainly
depends on (i) the brake event and (ii) the velocity reached during acceleration event.
The RPM ecoscore parameter describes the evaluation of acceleration events as a
factor to calculate ecoscore. For the estimation of RPM ecoscore, we take into account:
(i) the RPM event, (ii) an RPM event occurs when RPM > 2500 (these events are
also validated from Throttle position values if available), (iii) the maximum RPM value
during RPM event, (iv) the duration of an RPM event measured in seconds and (v) the
duration of temporal window.
The cruising ecoscore parameter evaluates the ecoscore during cruising. The cruis-
ing ecoscore is estimated using: (i) the vehicle speed, (ii) the mean vehicle speed, (iii)
the mean throttle position, (iv) the speed variance, (v) the throttle variance and (vi) the
temporal window.
Aggressiveness Score Estimation. The aggressiveness ecoscore calculation is based on
the following parameters: a) throttle position variance and engine RPM variance, b)
braking intensity, c) acceleration magnitude. High variance of engine RPM indicates
driver nervousness and improper vehicle handling. For example, significant fluctua-
tions in engine RPM are the result of a driver who is not focused on smooth cruising
and overall safe driving. Instead, they tend to accelerate many times for small dura-
tions, thus minimizing their fuel efficiency, eco-friendliness and safety for themselves
and others. The RPM variance parameter calculation is based on a 30 seconds tempo-
ral window for the calculate of RPM position variance. The standard deviation is then
111
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
111

normalized and scale it appropriately with experimentally defined parameter µ to con-
tribute to the final aggressiveness score. Furthermore, braking intensity is computed
during online analysis, based on the correlation between vehicle deceleration (as mea-
sured by vehicle speed decrease) and braking duration. This is intended to contribute
to the computation of aggressiveness score in a cumulative manner. Abrupt braking
events indicate poor planning from the driver’s part and a low level of situation aware-
ness regarding road conditions and surrounding traffic. Finally, lateral and directional
acceleration obtained from the mobile device’s accelerometer can provide a meaning-
ful measurement of steering and overall driving aggressiveness. While abrupt braking
and engine RPM variance are a good metric of aggressiveness in slow sections of the
driving route, they fail to provide similarly robust information in situations that require
greater velocity. To alleviate this, the lateral and directional acceleration magnitude is
integrated across time, so as to provide higher sensitivity for assessing aggressiveness
in such cases.
Physiological Score Estimation. Driving is an activity that requires considerable alert-
ness. Insufficient attention, imperfect perception, inadequate information processing,
and sub-optimal arousal are possible causes of poor human performance. Understand-
ing of these causes and the implementation of effective remedies is of key importance
to increase traffic safety and improve driver’s wellbeing. Several non-invasive measure-
ments have been considered in the literature. These include Electroencephalography
(EEG) based methods [20, 3, 2], Electrocardiography (ECG) and Heart Rate Variabil-
ity(HRV) related methods [35, 30, 14], image processing based approaches [33] as well
as tissue imaging and blood oxygenation measurement based studies [15]. In several
cases the HRV timeseries are used in conjunction with other validated methods such
as galvanic skin response[17, 45, 19, 50], thoracic electrical bioimpedance (TEB) [37],
EMG [50], respiration [29]. The extracted features from the aforementioned metrics are
used in most cases as input to classic classification approaches such as Naive Bayes,
SVM , KNN [14], neural networks [20], fuzzy clustering [30]. Recently, a study used
ECG data to derive mental stress in open road driving [41]. Electro cardiogram and
heart rate variability generate a series of time-domain, frequency domain-features or
nonlinear features computed over 24 h, five-minute-long short-term period, or ultra-
short-term period for under five-minute duration. Commonly referenced feature is the
LF/HF ratio associated with the sympatho-vagal balance [8, 44]. In a healthy organism,
there is a dynamic relative balance between the sympathetic nervous system(SNS) and
parasympathetic nervous system (PNS). SNS activation increases heart rate, whereas
PNS activation decreases it. Spectral analysis of HRV shows several frequency bands,
two of which are important here: a low-frequency component (LF; 0.04-0.15Hz) medi-
ated by both PNS and SNS, and a highfrequency component (HF; 0.15-0.4Hz) mediated
by PNS activation. As a result, the ratio of LF to HF power is sometimes used as an in-
dex of autonomic balance [23]. However later studies prove that this simple rule does
not apply in all cases [35] and that it is not a conclusive feature [48]. In most studies a
series of features are used all-together with state of the art classification approaches to
differentiate stressful situations in a case specific manner.
The physiological score calculation is part of the Online Analysis module, in the
same level with the ecoscore and aggressiveness calculation, which together form the
112
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
112

computational core for the evaluation of eco-friendliness during each driving session.
The main input of the physiological score module comes from the real-time data pre-
processing module, which in turn receives its input from the Sensor Layer. The cal-
culation of physiological score is based solely on heart rate measurements due to the
seamless connection of available HR sensor to mobile devices without the mediation of
propriety services. As features for the physiological score calculation, the value heart
rate variability and the window based LF/HF frequency ratio describing the autonomic
nervous system balance are considered. Personalized thresholds are extracted based on
LF/HF frequency ratio, mean heart rate and standard deviation for a temporal window
using simple decision rules. The desired outcome of the physiological score would be
a binary decision where TRUE or 1 declares that the driver is in aggravated state and
FALSE or 0 if the driver is calm. Thus, two classification approaches are employed:
– Decision Rule 1: The driver is assumed as stressed if his/her heart rate is higher
than the mean value plus the standard deviation of his/her heart rate based on the
personalized normal driving.
– Decision Rule 2: Given heart rate mean value and heart rate standard deviation
and LF/HF ratio for each annotated temporal we employ Random Forest and AD-
ABoost classifiers
For the evaluation a public dataset was employed [52] that includes data for n =
68 volunteers that drove the same highway under four different conditions: (a) No dis-
traction, (b) Cognitive distraction, (c) Emotional distraction and (d) Sensorimotor dis-
traction. Driving with no distraction means driving without secondary activities. This
type of driving is called Normal Drive (ND). A cognitive driving means driving under
a cognitive stressor. The cognitive stressor was mathematical questions and analytical
questions posed orally by the experimenter. An emotional driving means driving under
an emotional stressor. The emotional stressor was emotionally stirring questions posed
orally by the experimenter in two phases. Sensorimotor driving means driving under a
sensorimotor stressor. The sensorimotor stressor was texting back words, sent one by
one to the subject’s smartphone. The phase layout within each stressful driving con-
tentions; namely cognitive, emotional and sensorimotor stress, was as follows: 1) Phase
1: Driving without distractions for ∼ 80 s. 2) Phase 2: Driving while engaging in a
secondary activity for ∼ 160 s. 3) Phase 3: Driving without distractions for ∼ 240 s
(coincided with the detour). 4) Phase 4: Driving while engaging in a secondary activity
for ∼ 160 s. 5) Phase 5: Driving without distractions for ∼ 120 s.
Across all subjects, heart rates were calculated for each selected temporal window.
Then, the mean and standard deviation were calculated for each driving phase and for
each driver individually. Additionally, we separated each stress-loaded driving condi-
tion (e.g., Cognitive, Emotional, Sensorimotor) into two phases; namely the ”quite”
phase [Cognitive Drive (CD), Emotional Drive (ED), Sensorimotor Drive (SD)] and the
”original stress” phase [Stress Cognitive Drive (SCD), Stress Emotional Drive (SED),
Stress Sensorimotor Drive (SSD)]. In the ”original stress” phases the subjects are di-
rectly under a stress event (Phases 2, 4) while as ”quite” phases, it is represented the
period of time before, between and after a stress event (Phases 1, 3, 5).
113
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
113
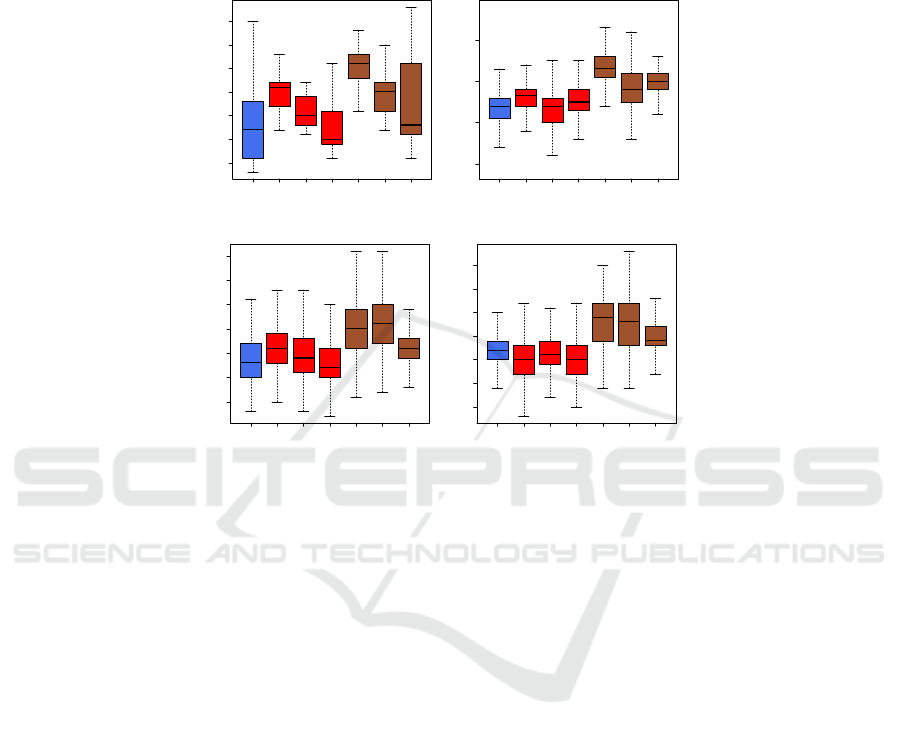
In Figure 5, the heart rate distribution of different drivers for different driving con-
ditions is presented in boxplots. As it can be observed the drivers’ heart rate is higher
when they drive under stress events in comparison with the normal driving phases
●●
●●●●●●●
●●●●●
●●●●
●●●●
1 ND
2 CD
3 ED
4 SD
5 SCD
6 SED
7 SSD
50
55
60
65
70
75
80
Driving Section
bpm
●
●
●
●●
●
●
●●
●●
●
●●
●
●
●
●
●
●
●●
●
●
●●
●●
●
●●
●
●
●●
●●
●
●
●
●
●●
●
●●
●
●●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●●
●
●
●
●
●
1 ND
2 CD
3 ED
4 SD
5 SCD
6 SED
7 SSD
70
80
90
100
Driving Section
bpm
●
●●
●
●●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●●
●●
●
●●●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
1 ND
2 CD
3 ED
4 SD
5 SCD
6 SED
7 SSD
70
75
80
85
90
95
100
Driving Section
bpm
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●●●●
●
●
●●●
●●
●
●
●
1 ND
2 CD
3 ED
4 SD
5 SCD
6 SED
7 SSD
70
75
80
85
90
95
100
Driving Section
bpm
Fig. 5. Boxplot with the heart rate values in different driving sections for the first 4 drivers.
3.3 Gamification
Based on the state of the art approaches[16] and the ideas and concepts of gamification
that have been proven to be most effective within an educational context – we can start
to map out how the gamification of GamECAR will look. Furthermore, we can marry
the different driving activities involved in GamECAR along with a set of desirable be-
haviours we want the gamified environment to stimulate and generate, from that, the
game elements that we can utilise as the basis for the gamification design. In general,
our gamified elements should be geared towards encouraging and supporting end users
to adopt the following desirable behaviours 1) Improved eco-driving skills 2) Improved
safe-driving skills 3) Better knowledge about the impact of different driving practices
4) Increased use of GamECAR while driving 5) Increased sharing of the GamECAR
app with others
The selected game elements for GamECAR derive from the identified gamification
trends and best practices. As we mapped out there, these trends relate to the identified
core drivers typical in gamified environments and to the four game phases that are
commonly seen. The diagram in Figure 6 below explains the links between all these
ideas and elements:
Based on this knowledge, a set of game elements and design proposals have been
developed that reflect the presented gamification strategies. Table 2 shows these game
114
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
114
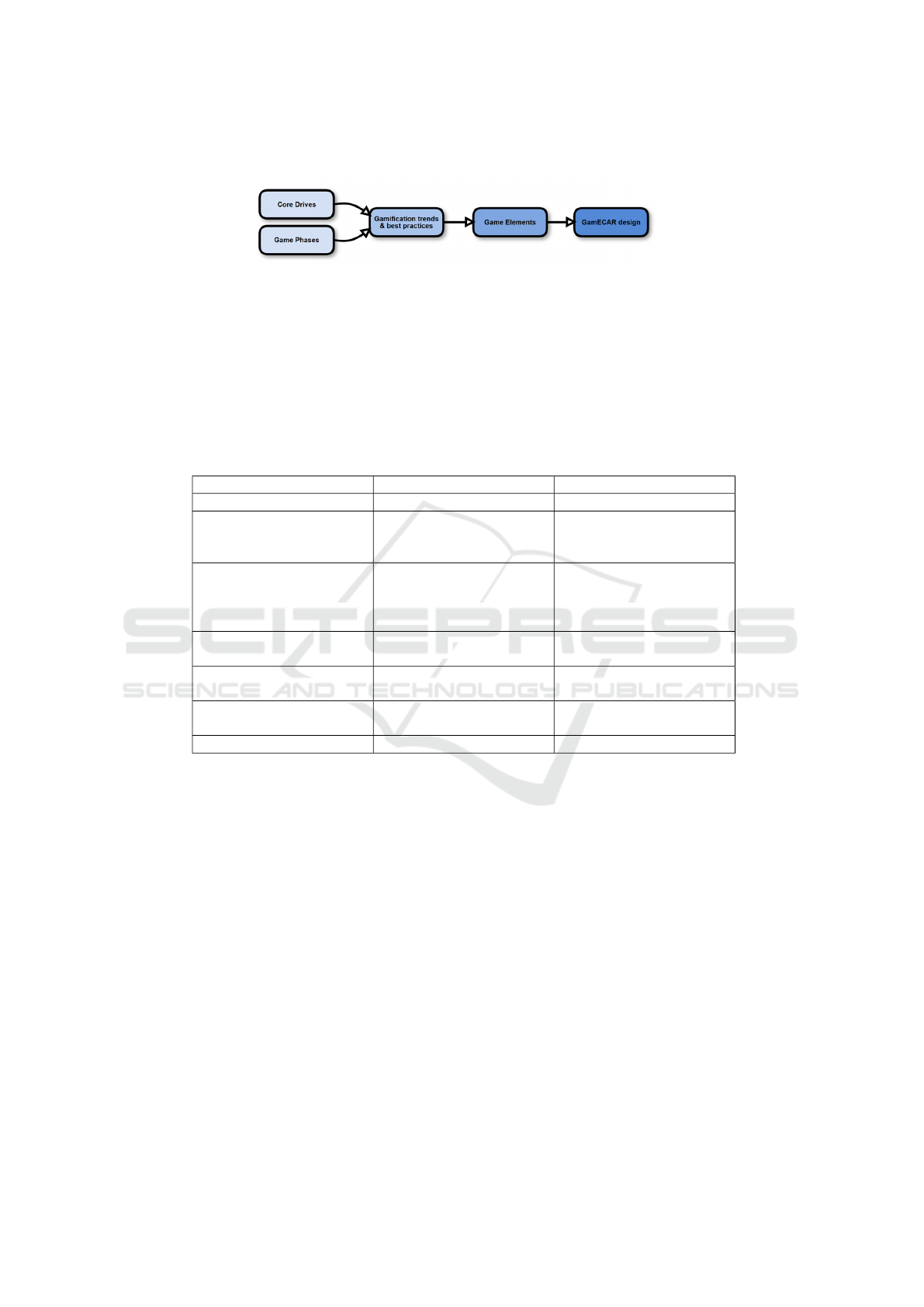
Fig. 6. Gamification approach.
elements, the concrete design proposals, and how they relate to different gamification
strategies and trends. The introduced design proposals follow a basic rule. Each of them
pursues one of the desirable behaviors in GamECAR, and complies with the presented
gamification trends and good practices. The diagram in Figure 7 presents the overall
gamification design where all the proposals are connected to work together. The main
activity that the user will undertake as part of their interaction with GamECAR is driv-
ing.
Table 2. Corresponce of gamification trends with core drives and game phases.
Gamification Trends Core Drives Phases
Storytelling Unpredictability & Curiosity Discovery
Goals Development and
Accomplishments , Loss &
Avoidance
Scaffolding, Endgame
Challenges and Quests Social Influence & Relatedness
& Development and
Accomplishments, Loss &
Avoidance
Scaffolding, Endgame
Customization Ownership & Possession Scaffolding, Discovery,
Onboarding
Progress Scarcity & Impatience Discovery, Onboarding,
Scaffolding, Endgame
Feedback Loss & Avoidance, Social
Influence
Scaffolding, Endgame
Access / Unlocking of content Unpredictability & Curiosity Onboarding, Scaffolding
Building Motivation. After each trip, an overall EcoScore for the trip is be calculated
and presented to the user, but as a part of the overall experience, other more concrete be-
haviours and parameters related to specific driving skills are also calculated and stored
as specific data (and accessible as scores or as the trigger for advice/feedback to the
user). This includes the following: 1) Fuel consumption 2) Gear change 3) Acceleration
4) Braking 5) Aggressiveness All of these parameters and scores are in fact related to
the specific desired behaviours pursued in GamECAR. And there is also an implicit
aspect to this: just using the GamECAR application while driving is one of the desired
behaviors and therefore just by following this behaviour, the user should improve his
or her status within the gamified system. As a part of each specific trip EcoScore, other
gamified elements will be earned or achieved during each active driving session. This
will include: 1) Driving skills awards 2) Badges 3) Avatar outfits 4) Knowledge cards
Game elements will be customized behind the scenes in order to appeal to different
115
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
115

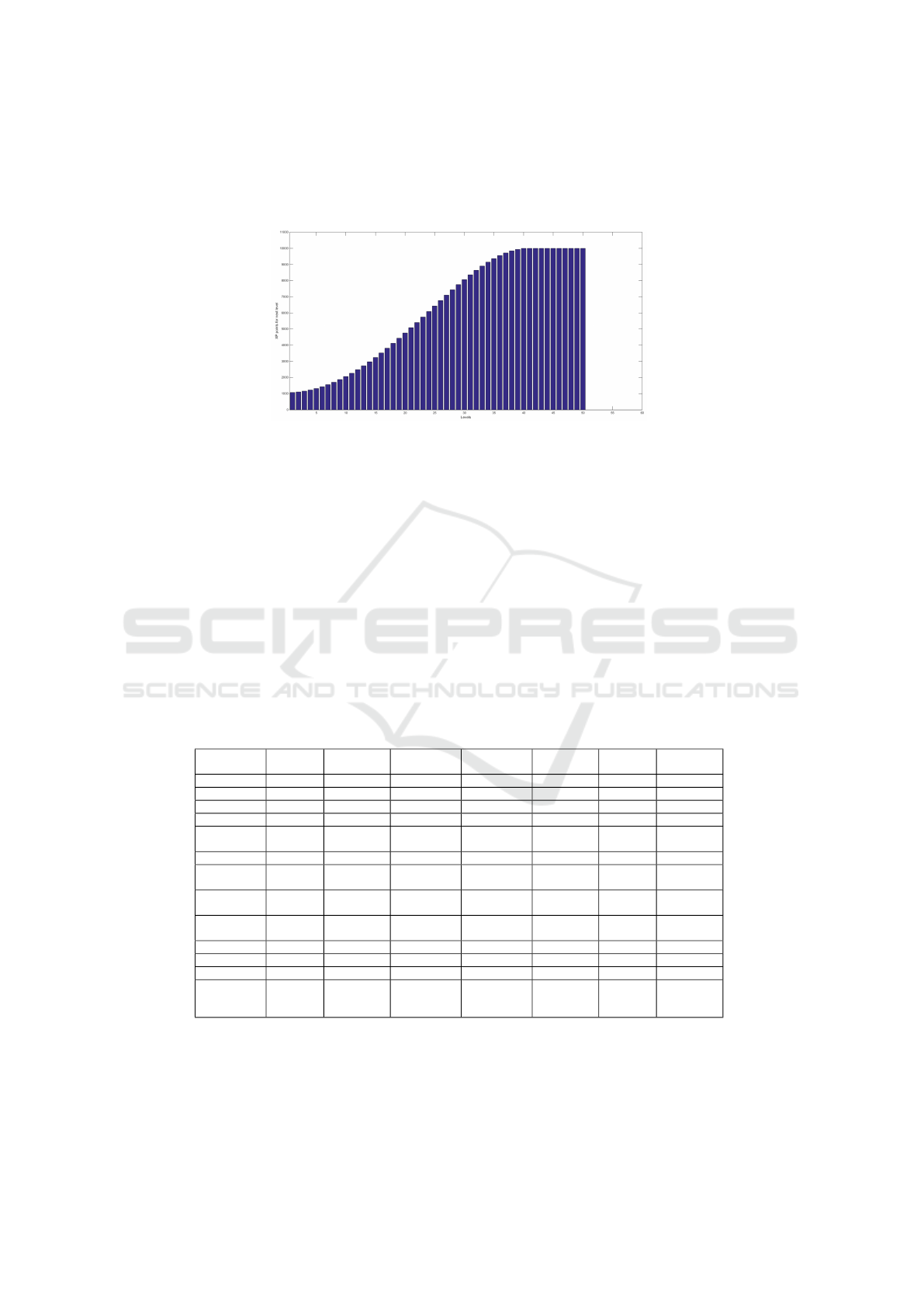
types of players during the different phases of the game. GamECAR drivers will gain
levels in the game, which require progressively more experience points (XP) as pre-
sented in Figure 8. These levels also determine the game phase, with each phase having
distinctive characteristics, features and objectives
Fig. 7. Overall presentation of gamification design.
Game Phases. The game evolves in four discrete , coherent phases, namely, discovery,
onboarding, scaffolding and endgame.
– Discovery phase : Levels 1-4 – estimated completion after 90-120 minutes of driv-
ing depending on Ecoscore. This phase’s main purpose is to familiarize the par-
ticipant with the game’s elements, scoring features, feedback, levelling system
and driving statistics extraction. To this end, the user gets introduced to Levels,
Ecoscore, HUD alerts and basic driving statistics.
– Onboarding: Levels 5-14 – estimated completion after 6-8 hours of driving, approx-
imately 9-16 days with 30 minutes of daily driving and a decent number of com-
pleted missions. This phase aims to expose the player to more advanced features
of the game. Apart from the discovery phase elements, this phase includes leader-
boards and leaderboard points (LP), daily missions with lootbox rewards, large-
scope missions with XP/LP, knowledge cards, lootboxes (drop likelihood depends
on eco-driving performance, up to 5 drops per month) and profile customization
(e.g. avatar).
– Scaffolding: Levels 15-39 – estimated time of completion after 45-57 hours of driv-
ing, approximately 2.5-4 months with 30 minutes of driving daily and a decent
number of completed missions. Scaffolding is the phase of the game that aims at
creating desirable habits to the player through his/her core drives. Along with all
the aforementioned features, the user now is granted the ability to create his/her
own crews in order to recruit other players as he gains a widely respected “veteran”
status.
– Endgame: Levels 40-50 (max) – estimated time to reach max level is approximately
1.5-2 months with 30 minutes of driving daily and a decent number of completed
missions. In the final stage of the game, the user starts getting personalized mes-
sages according to his/her weak driving aspects. He also gains access to advance
information visualizations regarding his/her performance compared to global statis-
116
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
116
tics. Finally, most of his visible status is subject to inactivity decay, i.e. it is gradu-
ally diminished while the player remains inactive.
Fig. 8. Experience points distribution required for the player to level up as a function of current
level.
The features are then further customized based on the detected type of each player.
Players are classified into 3 predefined classes, namely, Constant Improver, Safety en-
thusiast and Smart saver. The directions according to which the gamification features
are customized as shown in Figure 10. The figure shows the core drives that gamifica-
tion features should take advantage of in order to be most effective depending on each
player’s type and game phase. The figure is separated in two rows (representing early
and late phases of the game) and three columns, corresponding to the three aforemen-
tioned player types. During early phases, the focus is on core drives like Epic Meaning,
while later the focus shifts to Loss and Avoidance, Accomplishment and Social Influ-
ence [16]. Similarly, Accomplishment and Ownership are key drives for the Constant
Improver, as are Loss and Avoidance and Ownership for the Safety Enthusiast and So-
cial Influence and Scarcity for the Smart Saver.
Table 3. Game elements correspondence to gamification strategies
Game
elements
Story-
telling
Goals Chal-lenges Customi-
zation
Progress Feed-back Unlocking
Levels EcoScore Missions Rank Badges
Ranking Rank Trophies Rank Rank, VCP
Search Videos Cards Cards Avatar outfit Cards
Points EcoScore Rank EcoScore
Virtual
Currency
Avatar outfit Cards Cards
Special Events Videos Badges Badges Cards
Social Area VCP Coop.
Missions
Avatar outfit Skills Profile
Epic
Challenge
Missions Missions Missions
Customi-
zation
Avatar outfit Avatar outfit Avatar outfit
Access Item Videos Cards
Chat VCP
Skills EcoScore Skills Skills
Rewards Album Trophies Trophies
Album,
Trophies
Trophies Cards
117
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
117
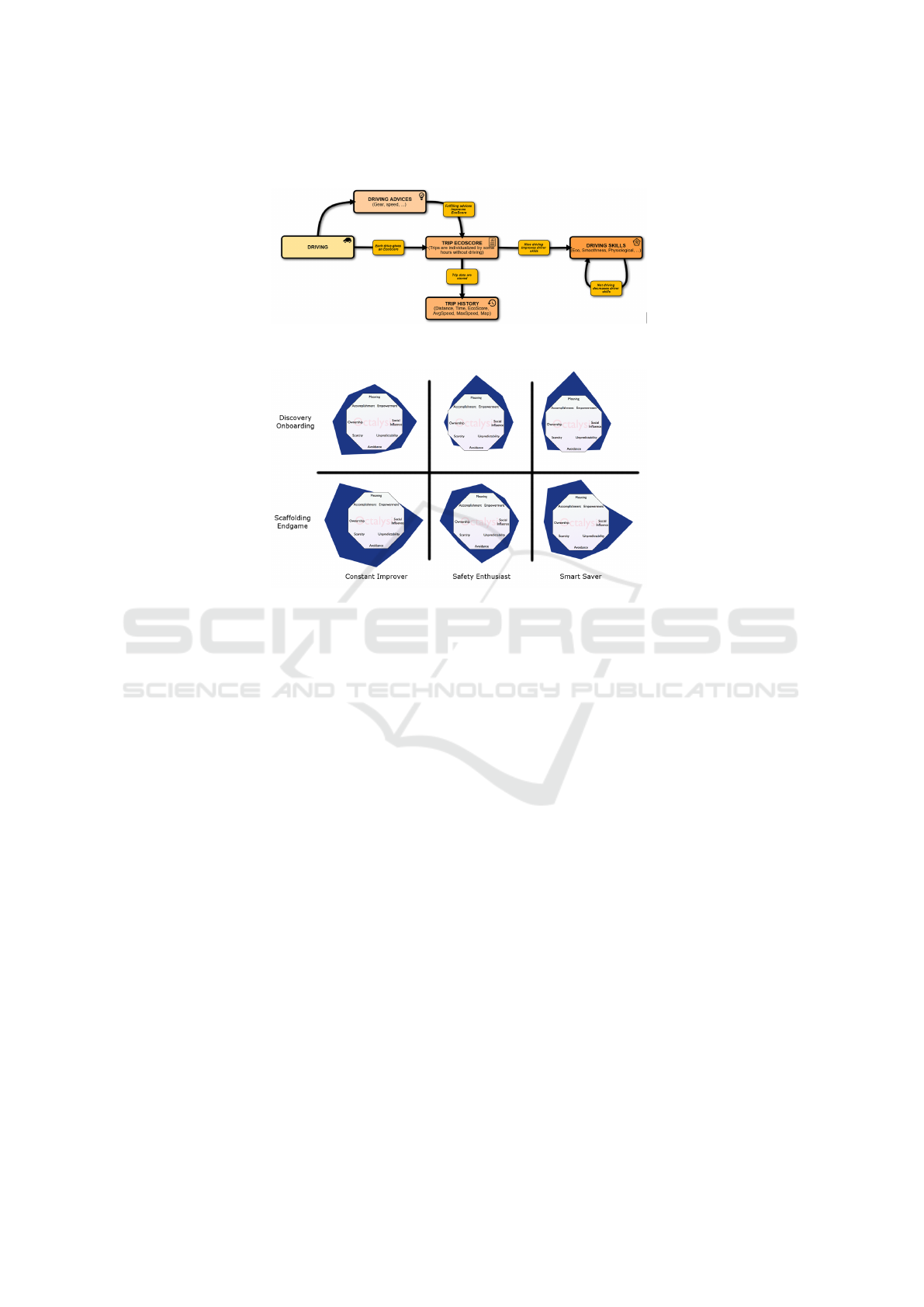
Fig. 9. GamECAR reward system.
Fig. 10. Distribution of core drives for each phase of the game and each player type.
The main tool for customizing the game experience and stimulating the appropriate
core drives are mission objectives, which are customized according to these diagrams.
For example, a mission for the Constant Improver should challenge him to beat his/her
previous performance or invite him to exceed the scores of his/her peers. Similarly, a
player in the Safety Enthusiast should face missions that are somewhat easier than the
corresponding missions for the other two categories, but place a heavy focus on consis-
tent performance and calm/eco-friendly road behaviour. Finally, missions posed to the
Smart Saver should feature as either objective or highlight the benefits of ecodriving
regarding reduced fuel consumption and positive environmental impact.
Use Cases. In this section two use cases are presented, the case of a new player and the
case of an experienced player.
1. A new user. John is a sales representative for a large pharmaceutical company. He
lives on the outskirts of Athens but travels a great deal across mainland Greece to
meet with clients and maintain his relationships. He has become increasingly in-
terested in environmental issues, every since the birth of his two children and he is
worried about the impact that pollution is having on air quality and on the environ-
ment in general. His job requires him to drive a lot but he wants to do something.
John read about GamECAR and immediately cherished the idea: he wanted to im-
prove his driving, be more fuel efficient and reduce his carbon footprint. Since John
was paying for his fuel consumption, reducing his fuel bills would be great. But he
118
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
118

needed help with his driving style. How would he know if he was actually having
any impact? Also, he leads a busy life and often would be rushing around without
really thinking about the way he was driving. Having something he could switch on
at the start of each journey, something that would give him feedback and something
where he had targets he could aim for would be great. He downloaded the GamE-
CAR application and got started. First, he set himself up as a user. It was a quick
process and allowed him to create his own profile and avatar.
2. The experienced user. Jaime was introduced to GamECAR by his work friend John.
They had been friends for years and really enjoyed competition. They would battle
over football and over tennis. And now they had GamECAR. Jaime spent some time
becoming familiar with the game and, like John, started to get his scores up and his
driver ranking up. He liked the way the app gave you individual targets around dif-
ferent driving skills and allowed you to track your progress. But he wanted more
engagement. After a few weeks of using the application, he opened it up one day
and was given a Loot Box. At first, he didn’t know what it was. But once he opened
it, he started to understand the world of Knowledge Cards and Missions. Having
been driving with GamECAR for a few weeks, he already had some good knowl-
edge of what helps you to be a better, more eco-friendly driver so the Knowledge
Cards should be simple! Once he answered the cards he had been given, a Mission
opened up. It was tough.
4 Discussion and Conclusion
Current self-management systems related to ecodriving, despite their complexity and
sophisticated nature, are practically proven inefficient, since they do not take into ac-
count a mixture of complex characteristics including age, sex, social status, financial
status, physiological measurements, driving behavior measurements and vehicle char-
acteristics. The proposed system is designed to fill this commitment gap by introducing
an innovative and interactive Serious game that guide targeted Driving behavior changes
to improve the way that various EcoDriving activities are undertaken so that the drivers
involved will be educated to take the desired actions and more importantly will be fa-
miliar with AR displays and applications while driving. Though GamECAR is expected
to be beneficial solution in the field of ecodriving education, the use of such systems
is not without challenges and limitations, most notably that of realism gap due to the
vast number of parameters that needs to be implemented. But they are still obstacles to
overcome, even if the system was flawless there are still lots of steps to be taken before
the use of AR driver-assistance systems in real life, such as ethical issues like the ban
of using technological means while driving. Additionally, Augmented reality head up
displays (AR HUD) are not yet fully capable of coping tasks like that, the limited field
of view and the low refresh rate are two examples of device limitations that need to be
improved. Ultimately, the AR technology has a limited target group, people that are in
early adulthood since it is challenging for someone older to get used to cutting-edge
technologies. On the other hand, the use of gamification in our system is a favorable
way to teach teenagers how to drive using the AR drive-assistance system from the
very beginning.
119
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
119

Acknowledgments. This work has been supported by the H2020-ICT-24- 2016 IA
project GamECAR (Grant No. 732068).
References
1. Akrivopoulos, O., Chatzigiannakis, I., Tselios, C., Antoniou, A.: On the deployment of
healthcare applications over fog computing infrastructure. In: 2017 IEEE 41st Annual Com-
puter Software and Applications Conference (COMPSAC). vol. 2, pp. 288–293 (July 2017).
https://doi.org/10.1109/COMPSAC.2017.178
2. Al-shargie, F., Tang, T.B., Badruddin, N., Dass, S.C., Kiguchi, M.: Mental stress assessment
based on feature level fusion of fnirs and eeg signals. In: Intelligent and Advanced Systems
(ICIAS), 2016 6th International Conference on. pp. 1–5. IEEE (2016)
3. Al-shargie, F., Tang, T.B., Badruddin, N., Kiguchi, M.: Simultaneous measurement of eeg-
fnirs in classifying and localizing brain activation to mental stress. In: Signal and Image
Processing Applications (ICSIPA), 2015 IEEE International Conference on. pp. 282–286.
IEEE (2015)
4. Alessandrini, A., Cattivera, A., Filippi, F., Ortenzi, F.: Driving style influence on car co2
emissions. In: 2012 international emission inventory conference (2012)
5. Alessandrini, A., Orecchini, F., Ortenzi, F., Campbell, F.V.: Drive-style emissions testing on
the latest two honda hybrid technologies. European Transport Research Review 1(2), 57–66
(2009)
6. Amaxilatis, D., Akrivopoulos, O., Chatzigiannakis, I., Tselios, C.: Enabling stream process-
ing for people-centric IoT based on the fog computing paradigm. In: 2017 22nd IEEE In-
ternational Conference on Emerging Technologies and Factory Automation (ETFA). pp. 1–8
(Sept 2017). https://doi.org/10.1109/ETFA.2017.8247674
7. Barkenbus, J.N.: Eco-driving: An overlooked climate change initiative. Energy Policy 38(2),
762–769 (2010)
8. Bianchi, A., Mainardi, L., Meloni, C., Chierchiu, S., Cerutti, S.: Continuous monitoring of
the sympatho-vagal balance through spectral analysis. IEEE Engineering in Medicine and
Biology Magazine 16(5), 64–73 (1997). https://doi.org/10.1109/51.620497
9. Bianchi, G., Biton, E., Blefari-Melazzi, N., Borges, I., Chiaraviglio, L., Cruz Ramos, P.,
Eardley, P., Fontes, F., McGrath, M.J., Natarianni, L., et al.: Superfluidity: a flexible func-
tional architecture for 5G networks. Transactions on Emerging Telecommunications Tech-
nologies 27(9), 1178–1186 (2016)
10. BMW: Eco pro (2012), http://www.bmw.com.af/com/en/insights/technology
/efficientdynamics/phase 1/measures ecopro.html
11. Cai, J.F., Cand
`
es, E.J., Shen, Z.: A singular value thresholding algorithm for matrix comple-
tion. SIAM Journal on Optimization 20(4), 1956–1982 (2010)
12. Candes, E.J., Plan, Y.: Matrix completion with noise. Proceedings of the IEEE 98(6), 925–
936 (2010)
13. Cand
`
es, E.J., Recht, B.: Exact matrix completion via convex optimization. Foundations of
Computational mathematics 9(6), 717 (2009)
14. Castaldo, R., Xu, W., Melillo, P., Pecchia, L., Santamaria, L., James, C.: Detection of mental
stress due to oral academic examination via ultra-short-term hrv analysis. In: Engineering in
Medicine and Biology Society (EMBC), 2016 IEEE 38th Annual International Conference
of the. pp. 3805–3808. IEEE (2016)
15. Chen, T., Yuen, P., Richardson, M., Liu, G., She, Z.: Detection of psychological stress using a
hyperspectral imaging technique. IEEE Transactions on Affective Computing 5(4), 391–405
(oct 2014). https://doi.org/10.1109/TAFFC.2014.2362513
120
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
120

16. Chou, Y.k.: Actionable gamification. Beyond Points, Badges, and Leaderboards (2015)
17. Ciabattoni, L., Ferracuti, F., Longhi, S., Pepa, L., Romeo, L., Verdini, F.: Real-time mental
stress detection based on smartwatch. In: Consumer Electronics (ICCE), 2017 IEEE Interna-
tional Conference on. pp. 110–111. IEEE (2017)
18. Cristea, M., Paran, F., Delhomme, P.: The role of motivations for eco-driving and social
norms on behavioural intentions regarding speed limits and time headway. World Academy
of Science, Engineering and Technology 6, 1307–6884 (2012)
19. De Santos Sierra, A., Sanchez Avila, C., Guerra Casanova, J., Bailador Del Pozo, G.: A
stress-detection system based on physiological signals and fuzzy logic. IEEE Transactions on
Industrial Electronics 58(10), 4857–4865 (2011). https://doi.org/10.1109/TIE.2010.2103538
20. del R Millan, J., Mourino, J., Franze, M., Cincotti, F., Varsta, M., Heikkonen, J., Ba-
biloni, F.: A local neural classifier for the recognition of EEG patterns associated
to mental tasks. IEEE Transactions on Neural Networks (3), 678–686 (may 2002).
https://doi.org/10.1109/TNN.2002.1000132
21. DriveSim: Drivesim simulator (2014), http://drivesimsimulator.com/en/
22. Eco-Drive, Q.A.: Ecodriver (2015), http://www.play-ecodriver.ch/en/
23. Electrophysiology, T.F.o.t.E.S.o.C.t.N.A.S.o.P.: Heart Rate Variability : Standards of Mea-
surement, Physiological Interpretation, and Clinical Use. Circulation 93(5), 1043–1065 (mar
1996). https://doi.org/10.1161/01.CIR.93.5.1043
24. Fiat: eco:drive app (2014), http://ecodrive.driveuconnect.eu/
25. Ford: Smart eco driving (2013), https://ford.devpost.com/submissions/16640-smart-eco-
driving
26. Hobert, L., Festag, A., Llatser, I., Altomare, L., Visintainer, F., Kovacs, A.: Enhancements
of v2x communication in support of cooperative autonomous driving. IEEE communications
magazine 53(12), 64–70 (2015)
27. Honda: Insight eco assist system (2017), http://world.honda.com/INSIGHT/eco/
28. Kalofolias, V., Bresson, X., Bronstein, M., Vandergheynst, P.: Matrix completion on graphs.
arXiv preprint arXiv:1408.1717 (2014)
29. Kontaxis, S., L
´
azaro, J., Hernando, A., Arza, A., Garz
´
on, J.M., Gil, E., Laguna, P., Aguil
´
o,
J., Bail
´
on, R.: Mental stress detection using cardiorespiratory wavelet cross-bispectrum. In:
Computing in Cardiology Conference (CinC), 2016. pp. 725–728. IEEE (2016)
30. Kumar, M., Weippert, M., Vilbrandt, R., Kreuzfeld, S., Stoll, R.: Fuzzy Evaluation of Heart
Rate Signals for Mental Stress Assessment. IEEE Transactions on Fuzzy Systems 15(5),
791–808 (oct 2007). https://doi.org/10.1109/TFUZZ.2006.889825
31. Lauper, E., Moser, S., Fischer, M., Matthies, E., Kaufmann-Hayoz, R.: Psychological predic-
tors of eco-driving: A longitudinal study. Transportation research part F: traffic psychology
and behaviour 33, 27–37 (2015)
32. Magana, V.C., Munoz-Organero, M.: Gafu: using a gamification tool to save fuel. IEEE
Intelligent Transportation Systems Magazine 7(2), 58–70 (2015)
33. McDuff, D., Gontarek, S., Picard, R.: Remote measurement of cognitive stress via
heart rate variability. In: 2014 36th Annual International Conference of the IEEE
Engineering in Medicine and Biology Society. pp. 2957–2960. IEEE (aug 2014).
https://doi.org/10.1109/EMBC.2014.6944243
34. Mensing, F., Bideaux, E., Trigui, R., Ribet, J., Jeanneret, B.: Eco-driving: An economic or
ecologic driving style? Transportation Research Part C: Emerging Technologies 38, 110–121
(2014)
35. Mili, G.: Low to High Frequency Ratio of Heart Rate Variability Spectra Fails to Describe
Sympatho-Vagal Balance in Cardiac Patients. Coll. Antropol 29172(1), 295–300 (2005)
36. Mitsubishi: Eco drive support (2013), http://www.mitsubishi-
motors.com/en/innovation/technology/library/eco drive.html
121
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
121

37. Mohino-Herranz, I., Gil-Pita, R., Ferreira, J., Rosa-Zurera, M., Seoane, F.: Assessment of
mental, emotional and physical stress through analysis of physiological signals using smart-
phones. Sensors 15(10), 25607–25627 (2015)
38. Mundke, R., Malewar, S., Arya, K.: Use of data recorder for driver rating. Tech. rep., SAE
Technical Paper (2006)
39. Nousias, S., Tselios, C., Bintzas, D., Orfila, O., Jamson, S., Mejuto, P., Amaxilatis, D.,
Akrivopoulos, O., Chatzigiannakis, I., Lalos, A.S., Moustakas, K.: Managing nonuniformi-
ties and uncertainties in vehicle-oriented sensor data over next generation networks. In: IEEE
Internaltional Conference on Pervasive computing and communications (2018)
40. Nouvelles, E.: Geco (2014), https://www.geco-drive.fr/
41. Parvaneh, S., Toosizadeh, N., Moharreri, S.: Impact of mental stress on heart rate asymmetry.
In: Computing in Cardiology Conference (CinC), 2015. pp. 793–796. IEEE (2015)
42. Reiners, T., Wood, L.C.: Gami cation in Education and Business. Springer (2015)
43. research, H., technology: Greenmeter (2018), http://hunter.pairsite.com/greenmeter/
44. Rigas, G., Goletsis, Y., Bougia, P., Fotiadis, D.I.: Towards driver’s state recognition on real
driving conditions. International Journal of Vehicular Technology 2011 (2011)
45. Salai, M., Vass
´
anyi, I., K
´
osa, I.: Stress detection using low cost heart rate sensors. Journal of
healthcare engineering 2016 (2016)
46. Saynor, B.: Ecowill deliverable 6.1: Guidelines for delivering short-duration ecodriving train-
ing courses (2011)
47. Schuller, B.W., Dunwell, I., Weninger, F., Paletta, L.: Serious gaming for behavior change:
The state of play. IEEE pervasive computing 12(3), 48–55 (2013)
48. Shaffer, F., McCraty, R., Zerr, C.L.: A healthy heart is not a metronome: an integrative review
of the heart’s anatomy and heart rate variability. Frontiers in Psychology 5(September), 1–19
(2014). https://doi.org/10.3389/fpsyg.2014.01040
49. Subaru: Ecology (2016), http://www.subaru.com.mt/eco driving.html
50. Sun, F., Kuo, C., Cheng, H., Buthpitiya, S., Collins, P., Griss, M.: Activity aware mental
stress detection using physiological sensors. Mobile Computing, Applications, and Services
76, 1–20 (2012)
51. Systems, S.S.S.: Eco driving package (2007), https://www.stsoftware.nl/
52. Taamneh, S., Tsiamyrtzis, P., Dcosta, M., Buddharaju, P., Khatri, A., Manser, M., Ferris, T.,
Wunderlich, R., Pavlidis, I.: A multimodal dataset for various forms of distracted driving.
Scientific data 4, 170110 (2017)
53. Texa: Texacare (2016), http://www.energysavingtrust.org.uk/scotland/
businesses–organisations/ transport/fuelgood-driver-training
54. Trust, E.S.: Fuelgood (2016), http://www.energysavingtrust.org.uk/scotland/
businesses-organisations/transport/fuelgood-driver-training
55. Tselios, C., Tsolis, G.: On QoE-awareness through virtualized probes in 5G networks.
In: 2016 IEEE 21st International Workshop on Computer Aided Modelling and De-
sign of Communication Links and Networks (CAMAD). pp. 159–164 (Oct 2016).
https://doi.org/10.1109/CAMAD.2016.7790351
56. Vlachos, E., Lalos, A.S., Berberidis, K., Tselios, C.: Autonomous driving in 5g: Mitigating
interference in ofdm-based vehicular communications. In: 2017 IEEE 22nd International
Workshop on Computer Aided Modeling and Design of Communication Links and Networks
(CAMAD). pp. 1–6 (June 2017). https://doi.org/10.1109/CAMAD.2017.8031619
57. Vlachos, E., Lalos, A.S., Moustakas, K., Berberidis, K.: Efficient graph-based matrix com-
pletion on incomplete animated models. In: Multimedia and Expo (ICME), 2017 IEEE In-
ternational Conference on. pp. 1548–1553. IEEE (2017)
58. Wengraf, I.: Easy on the gas: The effectiveness of eco-driving. Royal Automobile Club Foun-
dation, Tech. Rep. (2012)
122
EPS Portugal 2017/2018 2017 - OPPORTUNITIES AND CHALLENGES for European Projects
122

59. WeNow: Wenow (2016), https://www.wenow.com/en/eco-driving-your-way-towards-
energy-efficiency/
60. Zhou, X., Yang, C., Zhao, H., Yu, W.: Low-rank modeling and its applications in image
analysis. ACM Computing Surveys (CSUR) 47(2), 36 (2015)
123
Gamification of EcoDriving Behaviours through Intelligent Management of Dynamic Car and Driver Information
123
