
Fast Deduplication Data Transmission Scheme on a
Big Data Real-Time Platform
Sheng-Tzong Cheng, Jian-Ting Chen and Yin-Chun Chen
Department of Computer Science and Information Engineering, National Cheng Kung University, Taiwan
{stevecheng1688, eytu0233, darkerduck}@gmail.com
Keywords: Big Data, Deduplication, In-Memory Computing, Spark.
Abstract: In this information era, it is difficult to exploit and compute high-amount data efficiently. Today, it is
inadequate to use MapReduce to handle more data in less time let alone real time. Hence, In-memory
Computing (IMC) was introduced to solve the problem of Hadoop MapReduce. IMC, as its literal meaning,
exploits computing in memory to tackle the cost problem which Hadoop undue access data to disk caused and
can be distributed to perform iterative operations. However, IMC distributed computing still cannot get rid of
a bottleneck, that is, network bandwidth. It restricts the speed of receiving the information from the source
and dispersing information to each node. According to observation, some data from sensor devices might be
duplicate due to time or space dependence. Therefore, deduplication technology would be a good solution.
The technique for eliminating duplicated data is capable of improving data utilization. This study presents a
distributed real-time IMC platform -- “Spark Streaming” optimization. It uses deduplication technology to
eliminate the possible duplicate blocks from source. It is expected to reduce redundant data transmission and
improve the throughput of Spark Streaming.
1 INTRODUCTION
In recent years, with the development of Internet and
prevalence of mobile devices, a very huge amount of
data was generated daily. To be able to carry out some
operations on larger and more complex data now,
techniques for Big Data were presented. In 2004,
Google released a programming model MapReduce
(Dean, 2008) for processing and generating large data
sets with a parallel, distributed algorithm. Packages
have been developed and widely used nowadays.
They can make big-data analysis more efficient. For
instance, one of the mostly used packages is Hadoop
(Shvachko, 2010). It provides an interface to
implement MapReduce that allows people use it more
easily.
Hadoop MapReduce adapts coarse-grained tasks
to do its work. These tasks are very heavyweight for
iterative algorithms. Another problem is that
MapReduce has no awareness of the total pipeline of
Map plus Reduce steps. Therefore, it cannot cache
intermediate data in memory for faster performance.
This is because it uses a small circular buffer (default
100MB) to cache intermediate data, and it flushes
intermediate data to disk between each step and when
80% of the circular buffer space is occupied.
Combined these overhead costs, it make some
algorithms that require fast steps unacceptably slow.
For example, many machine-learning algorithms
were required to work iteratively. Algorithms like
training a recommendation engine or neural networks
and finding natural clusters in data are typically
iterative algorithms. In addition, if you want to get a
real-time result from the trained model or wish to
monitor program logs to detect failures in seconds,
you will need for computation streaming models that
simplify MapReduce offline processing. Obviously,
you want the steps in these kinds of algorithms to be
as fast and lightweight as possible.
To implement iterative, interactive and streaming
computing, a parallel in-memory computing platform,
Spark (Zaharia, 2010), was presented. Spark is built
on a powerful core of fine-grained, lightweight, and
abstract operations by which the developers
previously had to write themselves. Spark is
lightweight and easy to build iterative algorithms with
good performance as scale. The flexibility and
support for iterations also allow Spark to handle event
stream processing in a clever way. Originally, Spark
was designed to become a batch mode tool, like
MapReduce. However, its fine-grained nature makes
possible that it can process very small batches of data.
155

Therefore, Spark developed a streaming model to
handle data in short time windows and compute each
of them as “mini-batch”.
Network bandwidth is another bottleneck that we
wish to resolve. Bandwidth shortage is not from its
architecture but from the gateway between sensors
and computing platform (Akyildiz, 2002). The bridge
that collects data from sensors and transmits data to
server is performed by one or more gateways. Their
bandwidth is often low because of the wireless
network environment. Our proposal is to utilize these
transmitted data fully for low-latency processing
applications. In order to maintain or even improve the
throughput of computing platform, we adopt the real-
time parallel computing platform based on data
deduplication technology. It allows the efficient
utilization of network resources to improve
throughput.
Data deduplication is a specialized data
compression technique for eliminating duplicated
data. This technique is used to improve storage
utilization and can also be applied to network data
transmission to reduce the amount of bytes that must
be sent. One of the most common forms of data
deduplication implementation works by comparing
chunks of data to detect duplicates. Block
deduplication looks within a file and saves distant
blocks. Each chunk of data is processed using a hash
algorithm such as MD5 (Rivest, 1992) or SHA-1
(Eastlake, 2001). This process generates a unique
number for each piece which is then stored in an index.
If a file is updated, only the changed data is saved.
For instance, Dropbox and Google Drive are also
cloud file synchronization software. Both of them use
data deduplication technique to reduce the cost of
storage and transmission between client and
server. However, unlike those cloud storages, there is
no similar file between gateway and computing server.
Hence, we propose a data structure to keep those
duplicated part of data and reuse them. This is the part
where our work is different from those cloud storages.
In our work, the data stream from sensors can be
regarded as an extension of a file. In other words, the
data stream is also divided into blocks to identify
which blocks are redundant. So data deduplication
has quite potentials to resolve the problem of
bandwidth inadequate.
In this study, we propose that the deduplication
scheme reduces the requirement of bandwidth and
improves throughput on real-time parallel computing
platform. Interestingly, the data from sensors has
quite duplicated part that can be eliminated. This is
the tradeoff between processing speed and network
bandwidth. We sacrifice some CPU efficacy of
gateways and computing platform to exchange more
efficient utilization of network bandwidth. In brief,
we applied data deduplication technique completely
to improve the data re-use rate on distributed
computing system like Spark.
2 DATA DEDUPLICATION
TRANSMISSION SCHEME
In this section, we elaborate on the details of our
system design. We first clarify our problem in Section
2.1 and then the implementations and the parameter
definition are listed in the following sections. In
Section 2.2, we outline our system overview and
provide a series steps explanation then formulate our
bandwidth saving model. In Section 2.3, we describe
how to choose block fingerprint and give a
benchmark for hash functions to compare to select the
option. In Section 2.4, we give some concept to guide
users how to implement the data chunk preprocess
model.
2.1 Problem Description
The main problem we want to resolve is to reduce the
duplicated data delivery so that it can send more data
in limited time. This problem can be divided into
several sub-problems. The first one is that how to
chunk data so that we can make the set of data blocks
smaller. In other words, when the repetition rate of
data blocks is higher, the bandwidth saving becomes
more. However, if remote does not have similar data,
these chunking methods would not effective.
The second problem is that how sender decides
whether this data block has received or not. With
Rsync algorithm (Tridgell, 1998), it uses a pair of
weak and strong checksums for a data block to enable
sender to check whether the blocks have not been
modified or not. This gives a good inspiration to solve
it. In order to find the same data block, Rsync uses
strong checksum to achieve it. So, hash function is the
solution that is able to digest block into a fingerprint.
Block fingerprint can represent the contents of the
block and utilize less space, this is we want. However,
MD5 used in Rsync is not the best choice for our work.
This will be analyzed in Section 2.3.
2.2 Scheme Overview
Before describing solutions of these sub-problems,
we assemble these notions into a data block
deduplication scheme. We believe this scheme helps
Seventh International Symposium on Business Modeling and Software Design
156
us to reduce bandwidth utilization between gateway
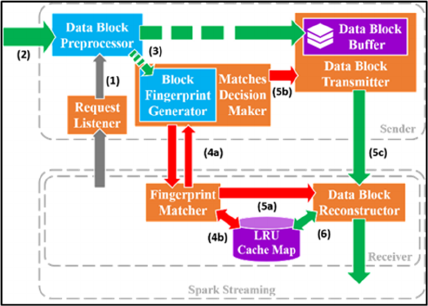
and computing platform. Figure 1 shows the scheme
overview that illustrates how we implement it.
Here we explain the meaning of control flow and
data flow. In Figure 1, the two biggest dotted boxes
represent a remote data source (i.e. Gateway) and a
real-time parallel computing platform (i.e. Spark)
respectively. The rectangles represent data handlers
that compute these data blocks like Data Block
Preprocessor and Block Fingerprint Generator and
communication interfaces that deliver and receive
control information and raw data. The cylinder
represents a limited memory data structure to store
data. In addition, all arrows are data flows that
illustrate how these data or blocks flow in our
scheme. The arrows around dotted box are related
with metadata that is used to control data
transmission. All steps in this scheme will be
described as follow.
Figure 1: Scheme overview.
Step 1: Once the receiver triggers Request
Listener, the listener accepts the connection and
notifies Data Block Preprocessor to handle raw data
stream.
Step 2: In Data Block Preprocessor, no matter if
the source of raw data stream is from a reliable disk
or sensor, it is spitted into data blocks. This
preprocess for raw data is so important that it
influences the whole data block deduplication
scheme. The detailed explanation and
implementation are presented in Section 2.4.
Step 3: These data blocks are pushed into Block
Fingerprint Generator and Data Block Buffer. In this
phase sender prepares the block fingerprints and data
blocks that are ready to send. The Data Block Buffer
has a memory space to cache these data blocks from
preprocessor and records the sequences of blocks that
will be used in data block transmitter. Its data
structure is a first in, first out(FIFO) Queue. Besides,
this process needs Block Fingerprint Generator to
generate hash value for each block, the detail
implementation is showed in Section 2.3.
Step 4: The Matches Decision Maker will
exchange metadata with Fingerprint Matcher in arrow
(4a). First, the Decision Maker sends the fingerprints
that belong to blocks stored in buffer to Fingerprint
Matcher. The matches that contain the information
whether or not blocks have been sent are returned to
Matches Decision Maker by Fingerprint Matcher. In
arrow (4b), Fingerprint Matcher uses these
fingerprints as key to ask the LRU cache map to find
out if this block has received or not. It uses a Boolean
array as matches, and the Boolean array retains the
order information which Data Block Transmitter
needs. Before returning matches, we need to do an
additional checking for fingerprints. Because some
duplicated data blocks are too close to each other, the
results of matches from LRU Cache Map do not
identify these duplicated data blocks. Before the data
blocks are stored into LRU Cache Map in Step 6,
these blocks are not in LRU Cache Map. This
situation makes some blocks identified as unique.
Hence, the additional checking is required.
Step 5: In Step 4, the metadata has been
exchanged between sender and receiver, and this said
that sender knows which data blocks do not need to
retransmit while the receiver knows how to
reconstruct these blocks as well. For arrow (5a), the
sequence of fingerprints and match information
notifies Data Block Reconstructor about how to
receive next data block. For example, the sequence is
like [(f
, F), (f
, T) , (f
, T), …] where f presents
fingerprint, F is false, and T is true. At that time,
arrow (5b) also indicates the result of matches as a
sequence like [F, T, T, …] to Data Block Transmitter.
After the metadata notifies the data communication
interfaces, it begins to pass blocks of raw data
sequentially. This is the reason why data block buffer
is a first-in, first out (FIFO) queue. It is used to
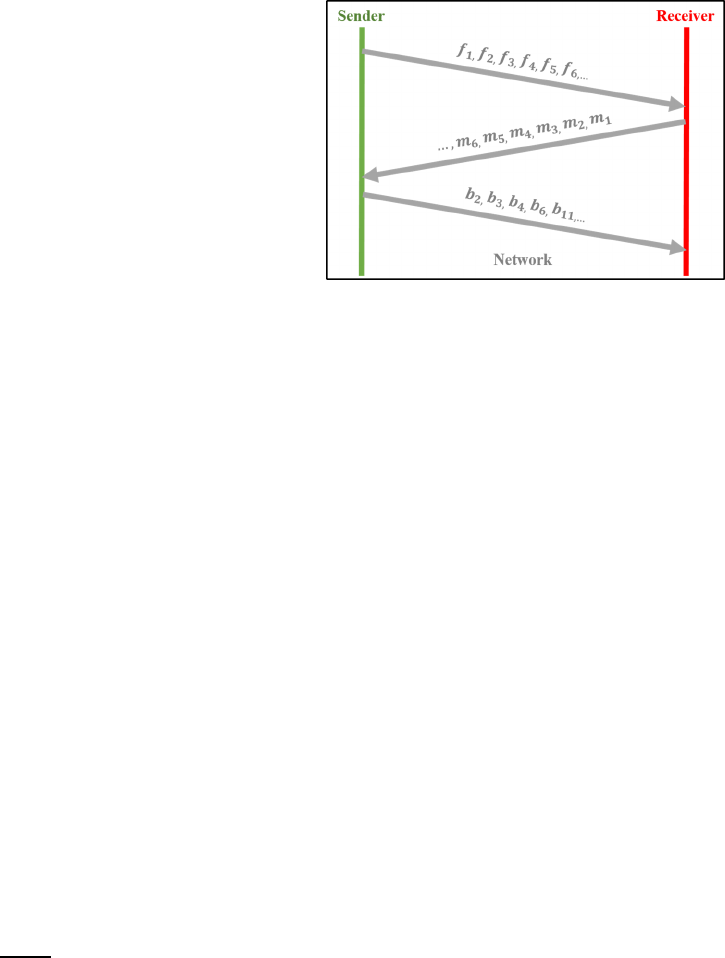
correspond matches sequence. Figure 2 illustrates the
data flow of arrows (5a) and (5b) across network.
This data flow completely shows how this scheme
saves bandwidth. We can observe that some blocks
are ignored to transmit on network, and this is reason
why our scheme works well. In addition, we can also
use some compression algorithm like gzip (Levine,
2012) to compress data and further reduce bandwidth
utilization. Moreover, to prevent blocks from waiting
for metadata, it is suggested to set a timer. When the
timer expires, send must transmit data without
control. This mechanism is to prevent receiver from
waiting data too long.
Fast Deduplication Data Transmission Scheme on a Big Data Real-Time Platform
157
Step 6: This is the last step for this scheme. The
Data Block Reconstructor arranges received data
blocks and matches and puts these received blocks to
LRU cache map, which stores the pairs of fingerprint
and block data with a limit size. This is the point that
makes reduplicated data utilization more efficient.
Because Spark requires much memory, the amount of
memory for this scheme to utilize is limited. Hence,
the LRU cache map is implemented with a least
recently used least recently used (LRU) Java hash
map data structure to reduce the influence of data
reusing. To prevent from occupying excessive
memory in receiver, we present the analysis about the
parameter for the data structure in the next section.
Finally, the duplicated data blocks could be ignored
and not required to store again. After storing these
blocks which are not received in LRU cache map,
receiver uses store API to notify Spark how many
blocks have received and need to compute with the
sequence of pairs of a fingerprint and a match
Boolean from matcher.
Suppose that sender sends a set of ℎ-byte hashes
as fingerprints to receiver, and that receiver uses these
hashes to check for match of each data block.
Suppose that the k-th block size is
bytes and the
size of a match is 1 bit (equal to 1/8 byte) as a
constant symbolα. In addition, we also suppose the
match of the k-th block is
. Finally, if there is
blocks handled in a time interval , it will give a
bandwidth-saving model, thus the bandwidth this
scheme saves in terms of bytes is
∑
ℎ
.
(1)
Note that
is
1,
is
1,
is
. The
symbol
means that if the block has been
transmitted, this scheme will save bandwidth, or it
will increase additional costs. Equation (1) shows that
the reduction of network utilization by using this
scheme is probably low because of the low repetitive
rate, and the worse thing is probably a negative value.
The repetition rate is a pivotal factor and it is
expressed as
∑
.
(2)
Note that
is
1,
is
0,
is
. The repetition rate
affects reduction of network utilization a lot, and it is
a positive correlation between both of them. So, in
order to gain the highest benefit for our work how to
chunk raw data into most of identical blocks becomes
the most crucial issue. In addition, size of data
fingerprint and size of a data block are also factors.
Thus, further analysis is required. We based these two
formulas to experiment with various parameters in
Section 3.
Figure 2: Data flow of Step 5.
2.3 Block Fingerprint
After chunking data blocks, it needs to further process
these blocks. To identify the identical blocks, the
fingerprints of their content are required. In Rsync, it
uses two different types of checksum, weak
checksum and strong checksum. The weak checksum
used in Rsync is a modified blocks checker because
of its fast process speed, and Rsync uses the rolling
checksum based on Mark Alder’s adler-32 checksum
(Deutsch, 1996) as implementation. However, the
weak checksum has no ability of determining which
blocks are the same owing to its high hash collision
probability, and therefore weak checksum is not our
option. The another strong checksum used in Rsync
is MD5. MD5 is a cryptographic hash function
producing a 128-bit hash value equal to 16 bytes.
Unlike rolling checksum, MD5 is able to identify the
blocks of the same content, it might be a choice.
We can observe the factor that fingerprint
influence is parameter ℎ. This makes sense that
onceℎ is smaller, the benefit for this scheme is better.
In other words, it can use less information to represent
the data blocks. Hence, 128-bit hash value is not so
ideal for our work. It needs to find a smaller size of
hash function to substitute it with a premise, and the
hash function can determine the same blocks as well.
The next property considered in Block Fingerprint
Generator is fast process speed. Although the concept
of this scheme is to utilize the compute resource of
remote node and achieve a benefit for bandwidth
saving, it could not lead to another bottleneck. So, the
throughput of the hash function used in Fingerprint
Generator must be as fast as possible. Obviously,
MD5 has been ruled out in our implementation on
account of its slow speed. It means it requires a more
suitable hash function.
Seventh International Symposium on Business Modeling and Software Design
158
In summary, the implementation of Fingerprint
Generator must have three properties, ability of
identification, smaller size and fast process speed.
The solution which we choose is xxHash (Collet,
2016). xxHash is an extremely fast non-cryptographic
hash algorithm, working at speeds close to RAM
limits. It is widely used by many software like
ArangoDB, LZ4, TeamViewer, etc. Moreover, it
successfully completes the SMHasher (Appleby,
2012) test suite which evaluates collision, dispersion
and randomness qualities of hash functions.
Although xxHash is powerful and successfully
completes the SMHasher test suite, its 32-bit version
still has collision. Here we provide a simple test to
verify 32-bit xxHash collision rate with a real-world
data. The data is from a GPS trajectory dataset (Yuan,
2011) that contains one-week trajectories of 10357
taxis. The sum of points in this dataset is about 15
million and the total distance of the trajectories
reaches 9 million kilometers. We use some data
reprocessing to filter the raw data and gather them
into a handled dataset. The file size of the handled
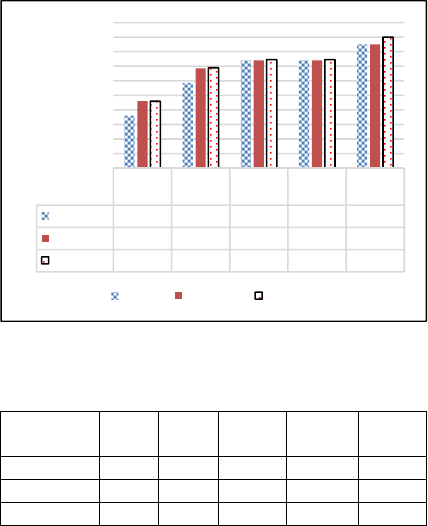
dataset is about 410 MB. Figure 3 illustrates the
repetition rates of the handled dataset with two hash
functions SHA-1 and xxHash.
We can see from Figure 3 that the repetition rate
of the first row is undoubted by using 160-bit SHA-1
function. We find that the repetition rate of xxHash32
is higher than SHA-1 about 0.1% in field Hash Map
which does not have any restriction. This 0.1%
difference means that the 32-bit xxHash occurs
collision in this simple test. In contrast, xxHash64 has
the same repetition rate with SHA-1. The collision
rate of xxHash64 is lower than xxHash32, but
xxHash64 also has higher cost because its longer hash
value size for our scheme. Even the xxHash32 has the
risk of collision, we still prone for it. There are two
reasons that mitigate the influence of collision. The
first one is about its probability; hence, we consider
that 0.1% deviation could not affect the result a lot.
On the other hand, this error can be handled in
computing phase by some operations. Another one is
the implementation of hash map is LRU hash map, so
the limitation not only prevents to occupy excessive
memory but also reduces the occurrence of collision
with an extra cost of having the repetition rate a little
lower. Because after discarding the least recently
used data blocks, the occurrences of collision have
high possibility to eliminate. In summary, we said the
defect of xxHash32 used in this scheme is ignorable.
The memory size of LRU Cache Map is based on
two factors, one is the size of hash value, and another
one is its parameter. In Table 1, it shows that the
standard hash map can store all fingerprints and data
block, but it leads to out of memory. That is why we
pick LRU hash map. The average size of records in
the dataset is about 25 bytes. It shows xxHash32 has
the smallest memory size for the LRU hash map.
Figure 3: Repetition rate and LRU Cache Map analysis.
Table 1: Memory size of each data structure.
Hash
Map
LRU-
10^3
LRU-
10^4
LRU-
10^5
LRU-
10^6
SHA-1 OOM 50KB 500KB 5MB 50MB
xxHash64 OOM 35KB 350KB 3.5MB 35MB
xxHash32 OOM 30KB 300KB 3MB 30MB
2.4 Data Chunk Preprocess
In file synchronization systems, most of the time, the
content difference between local node and remote
node is slightly small. So, the methods of file
synchronization are focus on how to find out the
different parts between two files. Note that the data
generated by sensors in a time interval comes in
record by record. For instance, consider the GPS
dataset. The average size of the record in the GPS
dataset is about 25 bytes. On the contrary, the
parameter s in Rsync is at least 300 bytes, let alone
the average block size in LBFS is 8KB. Therefore, a
fine-grained chunking method is essential for our
work.
The data block in our scheme is like a record that
sensor generates in a time interval. Spatial
dependence leads to a neighbour cluster of sensors to
detect similar values; time dependence leads to each
record from the same sensor to measure smooth data.
Therefore, we split raw data and obtain duplicated
records as possible as it can be.
In sensors network, a cluster head collects the real-
time data from many sensors. There is so much noise
that causes low probability to distinguish the
duplicated part. To identify the difference, we require
LRU-
10^3
LRU-
10^4
LRU-
10^5
LRU-
10^6
Hash
Map
SHA-1
28,12% 28,57% 28,88% 28,88% 29,10%
xxHash64
28,32% 28,77% 28,88% 28,88% 29,10%
xxHash32
28,32% 28,78% 28,89% 28,89% 29,20%
27,40%
27,60%
27,80%
28,00%
28,20%
28,40%
28,60%
28,80%
29,00%
29,20%
29,40%
Repetition Rate
SHA-1 xxHash64 xxHash32
Fast Deduplication Data Transmission Scheme on a Big Data Real-Time Platform
159
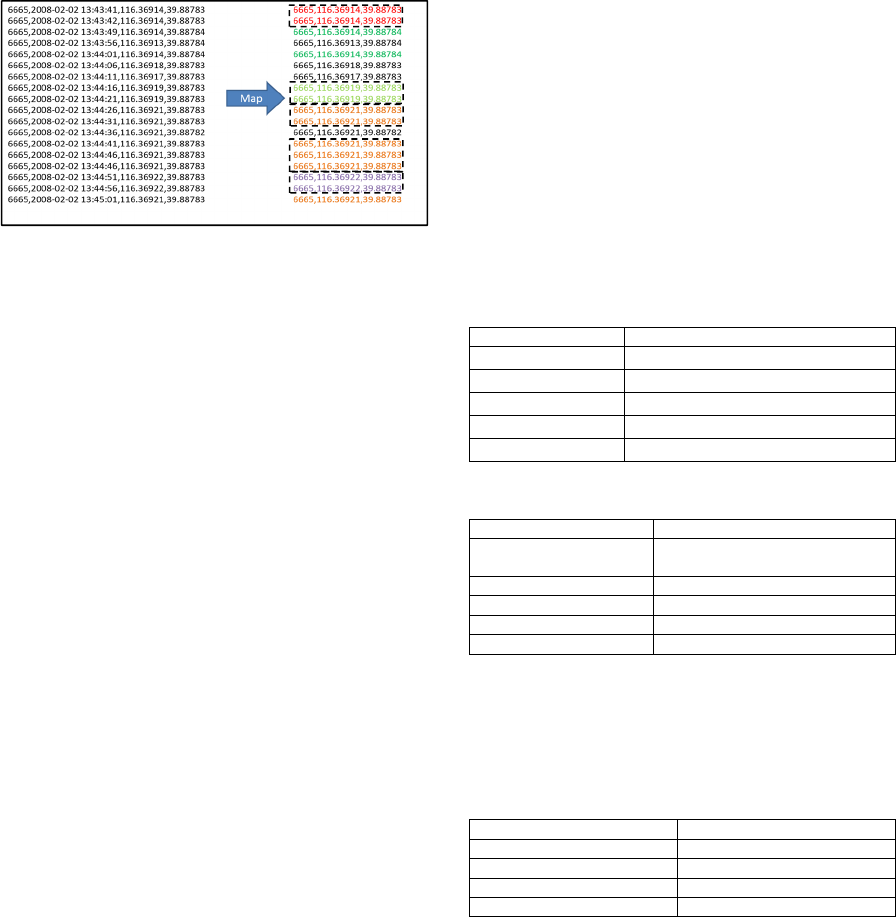
some measure to filter out noise. Take the GPS
dataset as an example. Figure 4 shows the mapping
from original trajectory dataset to the handled dataset.
We observe that the original dataset has four fields
which are separated by commas. These fields are taxi
id, data time, longitude, and latitude. For the field of
data time we call it the dynamic field, because it
always changes so that it causes our scheme gain
benefit with difficulty. After eliminating the dynamic
field, the handled dataset exhibits several duplicated
records set.
Figure 4: Filter out the dynamic field.
According to this case, the average size of records
is obviously smaller than original. According to the
parameter
in Equation (1), this causes some loss of
bandwidth savings. So, how to keep original
information of raw data with data preprocess is
considered as a challenging problem. The balance
between data integrity and data repetition rate
depends on how users identify the dynamic fields.
Dynamic fields are often commonly found for
data from sensors. The occurrences of dynamic fields
are because the sensors are too sensitive or a lot of
other factors. To face these situations, some methods
from data mining can be used to preprocess data. One
of methods is data generalization, for instance, there
are three sensors in a room, and these sensors are able
to sense someone entering this room with a distance
by infrared ray. Suppose an application only cares
when the person enters and leaves, the distance data
is applied by concept hierarchy to map a value which
shows if the person is in the room or not. It replaces
the relatively dynamic distance value with a Boolean.
Hence, the handled data from infrared ray sensors has
higher probability to have duplicated part. Other
methods also have similar idea that makes data
general. Fuzzy sets (Zadeh, 1965) and fuzzy logic can
also be used to process raw data. If we use fuzzy logic
to classify continuous value, the data will be more
general and generate duplicated part. Our another
concern is complexity of the method. Because the
gateway has limit processing resource, the
complexity of the method must be low. In summary,
we present a data deduplication scheme which
eliminates the duplicated data that does not need to be
retransmitted to improve the effectivity of data
utilization in low bandwidth network environment.
3 IMPLEMENTATION
In this paper, we take Spark as the platform and
introduce the implementation of the data
deduplication scheme on the sender and the receiver
sides. We also conduct several experiments with
various parameters to show the significance of our
scheme.
3.1 Experiment Environment and
Setting
We use a peer-servicing cloud computing platform
that contains eight homogeneous virtual machines.
The software and hardware specifications of the
receiver are detailed in Tables 2 and 3 respectively.
Table 2: Receiver environment.
Item Content
OS Ubuntu 15.10 Desktop 64bit
Spark 2.0.0
Java 1.7.0_101
Scala 2.11.8
Maven 3.3.9
Table 3: Hardware specification of receiver.
Item Content
CPU
Intel(R) Xeon(R) E5620
@2.40GHz x 2
RAM 8 GB
Hard Drive 80GB
Network Bandwidth 1Gbps
Maven 3.3.9
Besides, to simulate the gateway used in the real
world, we use raspberry pi 2 as the sender. The
hardware and software specification for the raspberry
pi is detailed in Tables 4 and 5 respectively.
Table 4: Sender environment.
Item Content
OS Raspbian-32bi
t
Java 1.8.0_65
Scala 2.9.2
Linux Kernel 4.1.19
Seventh International Symposium on Business Modeling and Software Design
160
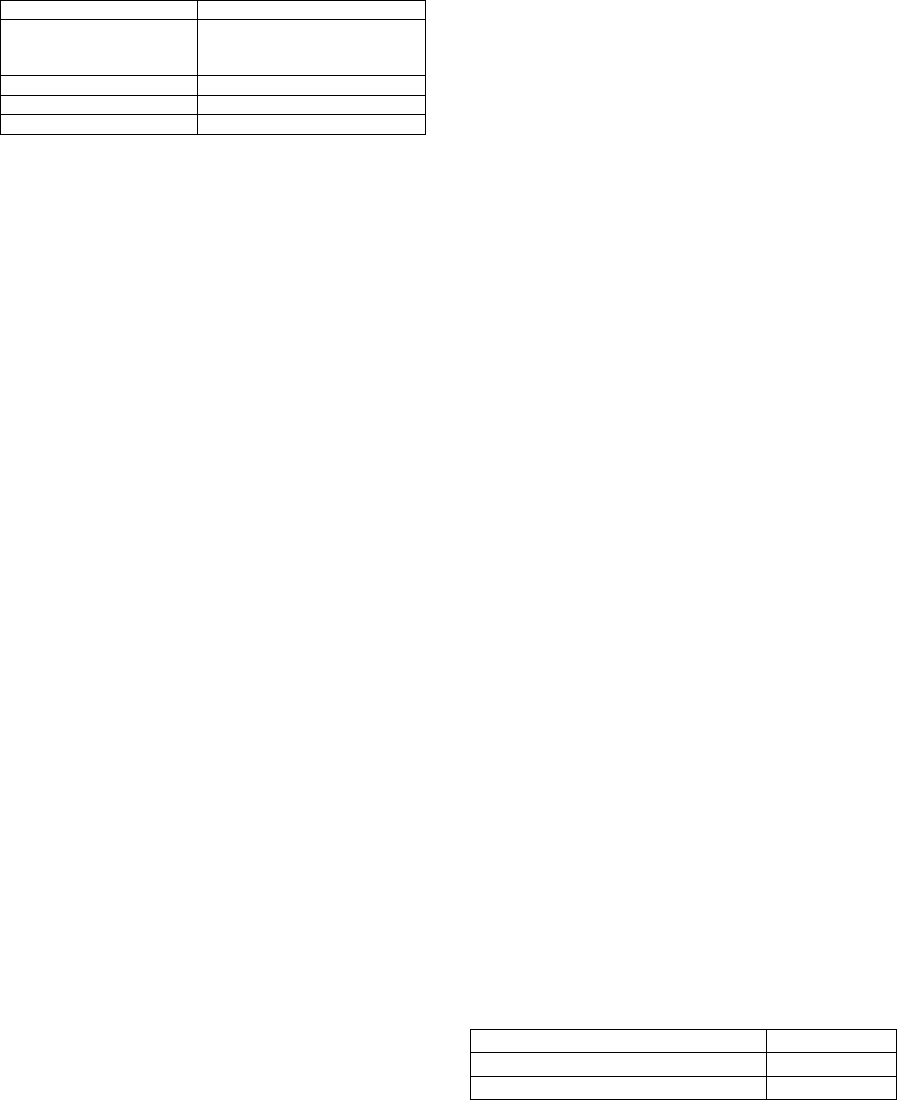
Table 5: Hardware specification of sender.
Item Content
CPU
Broadcom BCM2836
ARMv7 Quad Core Processor
@900 MHz
RAM 1 GB
Hard Drive(SD card) 32GB
Network Bandwidth 1Gbps
3.2 Implementations
Both of the sender and receiver use Scala (Odersky,
2007) as the programing language. First we introduce
the implementation of the sender. Sender accepts a
TCP connection as Request Listener. Then it begins
to read experimental data from SD card in raspberry
pi, and pushes these data into Matches Decision
Maker and Data Block Buffer. The Matches Decision
Maker computes each fingerprint for each data block
as Block Fingerprint Generator with xxHash32.
These fingerprints are sent to receiver and then sender
waits for the matches. The Data Block Buffer is
implemented by a Java API, ArrayBlockingQueue
class, which is thread safe and provides synchronous
data access. Data Block Transmitter receives the
responses of matches and decides which block needs
to be transmitted to receiver.
On the receiver side, the implementation of
receiver is based on the Spark platform. Nevertheless,
our scheme can work well on other parallel
computing platforms too. The original Spark only
receives data from a reliable data storage such as
storage, database, and HDFS. In order to receive data
as stream, Spark Streaming lets user choose the
interface of data source. Spark Streaming provides
these interfaces like fileStream, socketStream,
kafkaStream (Kreps, 2011), twitterStream, etc. Most
importantly, Spark Streaming also provides an API to
customize the data receiving interface. An API call
Receiver is the place that allows us to implement our
approach into Spark platform. Its native Receiver API
implements simple operations. These operations
include opening a socket, receiving each line from the
socket, putting them into Spark to compute with Store
API. Therefore, we augment the Spark with the data
deduplication scheme to accept streaming data. Table
7 presents the parameters of the first experiment.
Before receiving data blocks, the scheme needs to
exchange metadata between sender and receiver.
Then, the data blocks that are required to receive must
be determined. A TCP connection is used as a trigger
to notify sender to start the whole process. The
customized receiver gets fingerprints from the sender.
Fingerprint Matcher uses these fingerprints to query
LRU Cache Map whether the data block is received
or not. The LRU Cache Map is implemented by LRU
hash map described in Section 2.3. Another TCP
connection returns the result of matches to sender.
After metadata exchanging, the native line reading
process is revised to Data Block Reconstructor. With
metadata, Data Block Reconstructor rebuilds data
from two sources: sender and LRU hash map. If the
block was received before, it retrieves the data block
from LRU hash map with the fingerprint of the data
block; otherwise, it requests the sender a new data
block by the third TCP connection and also puts the
new data block into LRU hash map. Finally, Data
Block Reconstructor reorganizes raw data as
sequence and uses Store API to feed these data blocks
to Spark Streaming to compute in parallel and batch.
4 EXPERIMENTAL RESULTS
The application of Word Count was tested to evaluate
the performance of the scheme on Spark Streaming.
It performs a sliding window count over 5 seconds.
Table 6 presents the experimental configurations in
Spark Streaming.
4.1 Empirical Result
In order to evaluate our proposed scheme, several
evaluation scenarios are defined and conducted in this
section. First, we explain the evaluation scenarios and
assumptions. Equations (1) and (2) indicate the three
parameters that have impact on the performance of
our work. These parameters are the data block length,
the length of fingerprint, and the repetition rate.
Moreover, another environment parameter that is also
an important factor for our scheme is bandwidth. So,
the following experiments will be conducted to adjust
one single parameter and fix the other three
parameters. Consider a streaming application that
computes data continuously. It generates a result in a
specified time interval (5 seconds). We sample the
result with 120 time intervals (600 seconds). We use
a probability value to simulate the repetition rate of
test data.
Table 6: Configuration in Spark Streaming.
The memory size of the driver 4GB
The memory size of each executor 1GB
The number of executors 8
4.1.1 Length of Data Block
The first experiment we study is the impact of the
length of data block, namely
in Equation (1), on
Fast Deduplication Data Transmission Scheme on a Big Data Real-Time Platform
161
the system throughput. The length of data block in
this experiment is an average value in terms of bytes.
Other parameters are shown in Table 7. The
experimental results are given in Figure 5.
Table 7: Parameters of the first experiment.
Bandwidth 1Mbps
Repetition Rate 25%
Length of Fingerprint 32 bits
Limitation of LRU Cache Map 1,000,000
We see from Figure 5 that the throughput for the
original scheme in Spark is almost the same for all
lengths of data block. However, with our
deduplication scheme, the throughput increases as the
length of data block becomes bigger. These results
conform to Equation (1). It means that if a fingerprint
can present data blocks with a bigger size, it saves
more bandwidth when a data block is repeated. The
throughput improvement reaches the top when the
length of data block is 30. When a data block with
more than 30 bytes is used, the system throughput
does not get higher.
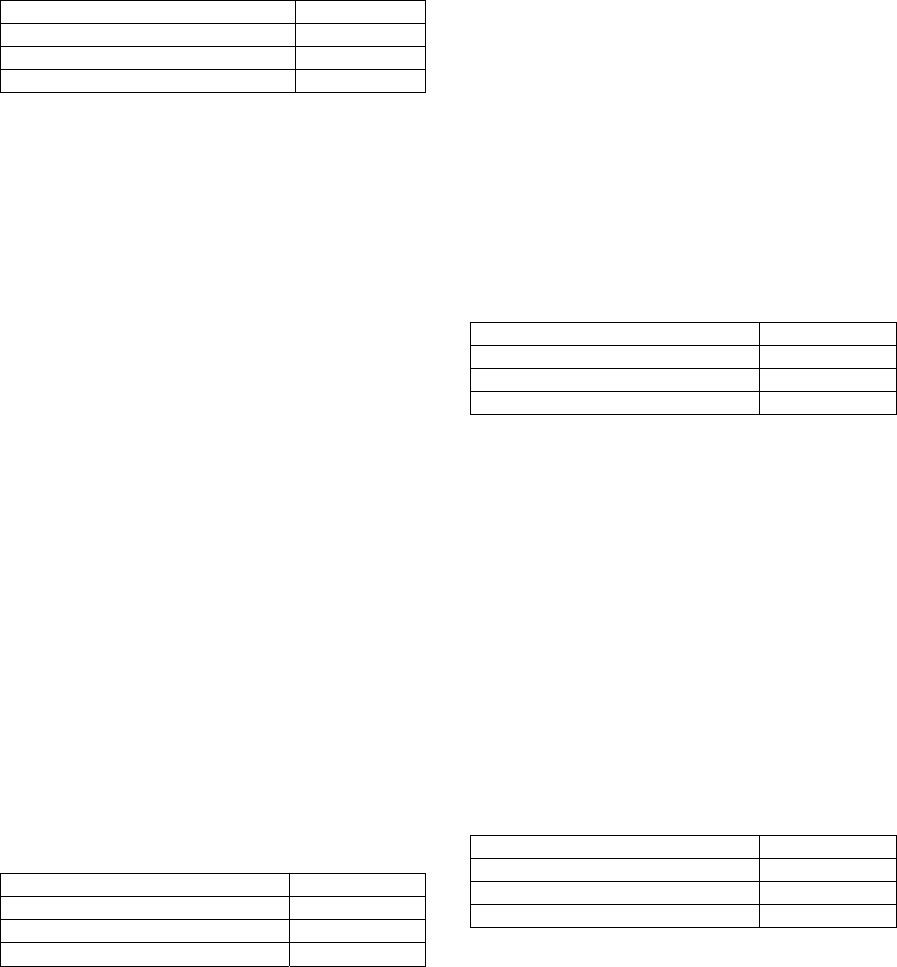
4.1.2 Repetition Rate
The most crucial factor in our scheme is the repetition
rate. In Section 2.2, the repetition rate is expressed in
Equation (2). In this experiment, we focus on how the
throughput goes with the changing of repetition rate.
Parameters for this experiment are shown in Table 8.
The experimental results are given in Figure 6.
We see from Figure 6 that the throughput for the
original scheme in Spark is almost the same for all
lengths of data block. With our deduplication scheme,
the throughput increases as the repetition rate
becomes bigger. Furthermore, we can see that the
throughput only improves about 10% when repetition
rate is 5%. Nevertheless, the improvement
approaches dramatically to 60% when the repetition
rate is 40%. We conclude that the proposed scheme
can transmit more data in a limited bandwidth.
Table 8: Parameters of the second experiment.
Bandwidth 1Mbps
Avg. Length of Data Block 25 bytes
Length of Fingerprint 32 bits
Limitation of LRU Cache Map 1,000,000
4.1.3 Length of Fingerprint
The factor studied in the third experiment is the length
of fingerprint. In our work, a 32-bit version of xxHash
is chosen as the implementation. In this experiment,
we compare the performance of 32-bit version with
the version of 64-bit xxHash. Parameters of this
experiment are shown in Table 9. The experimental
results are given in Figure 7.
Figure 7 shows that, for both 64-bit version and
32-bit version, the throughput improves when the
repetition rate increases. However, it is noted that
when the length of fingerprint becomes longer, the
cost of metadata will be increased. Hence, the
throughput for 64-bit version gets less improvement
(compared with the 32-bit version) with longer length
of fingerprint. We observe from the results that the
performance of 64-bit version has only about half
improvement over that of 32-bit version. It conforms
that parameter ℎ influences the saving of bandwidth
in Equation (1). In other words, if the speed of hash
functions is about the same, a shorter hash value will
be a better choice for our scheme.
Table 9: Parameters of the third experiment.
Bandwidth 1Mbps
Repetition Rate 25%
Avg. Length of Data Block 25 bytes
Limitation of LRU Cache Map 1,000,000
4.1.4 Bandwidth
Bandwidth usage can be reduced by our proposed
scheme. In this experiment, we investigate how the
availability of network bandwidth impacts on the
system throughput. Parameters of this experiment are
shown in Table 10. The experimental results are given
in Figure 8.
When the bandwidth gets higher, both the original
scheme and the proposed scheme have bigger
throughput. We also see that the throughput gap
between these two schemes grows exponentially. The
improvement ratio runs around 25% to 35%. It means
that our scheme works better than the original scheme
by at least one quarter of the system throughput.
Table 10: Parameters of the fourth experiment.
Repetition Rate 25%
Avg. Length of Data Block 25 bytes
Length of Fingerprint 32 bits
Limitation of LRU Cache Map 1,000,000
4.1.5 Physical World Taxi GPS Trajectory
Dataset
In the last experiment we use the real-world taxi GPS
trajectory dataset to evaluate the performance of our
scheme. Table 11 presents the parameters setting in
this experiment.
Seventh International Symposium on Business Modeling and Software Design
162
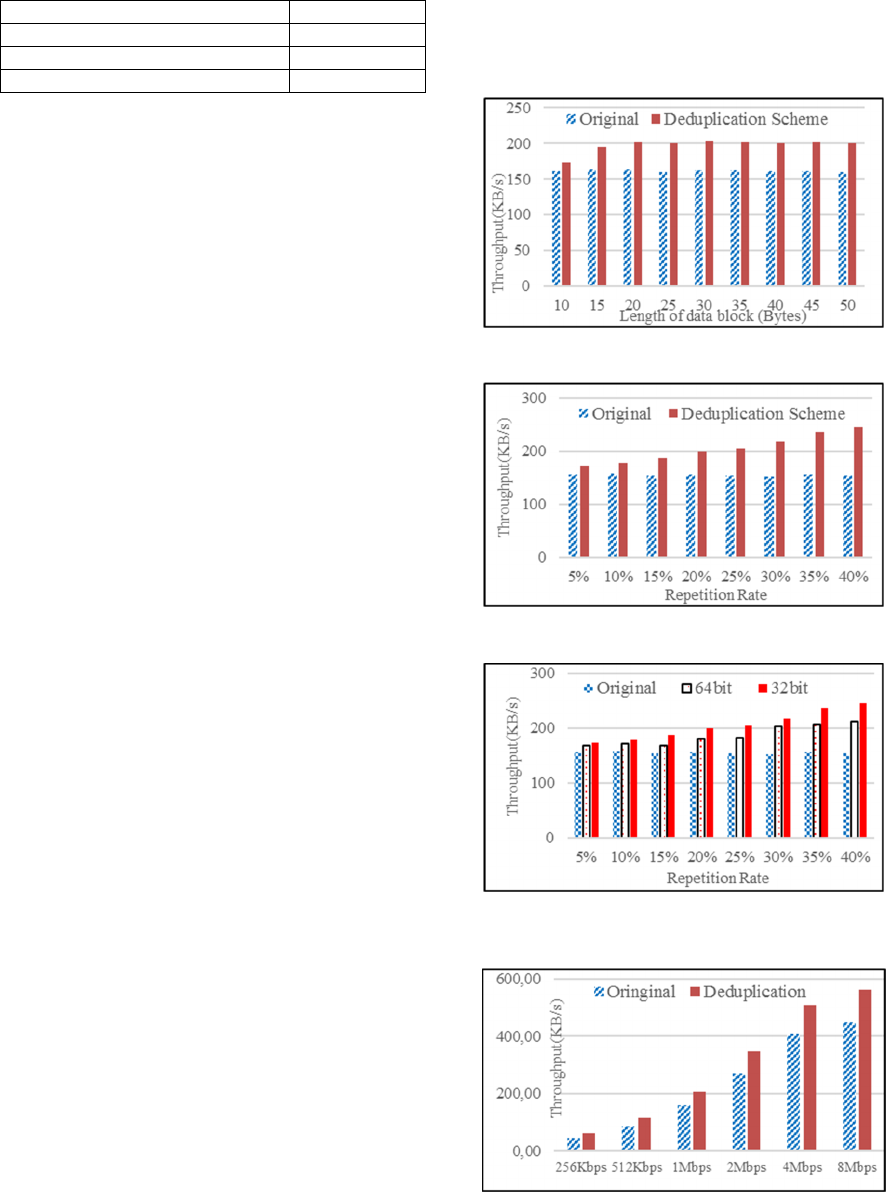
Table 11: Taxi GPS trajectory dataset.
Bandwidth 1Mbps
Avg. Length of Data Block 25 bytes
Length of Fingerprint 32 bits
Limitation of LRU Cache Map 1,000,000
Figure 9 illustrates the performance of our data
deduplication scheme and that of the original scheme
in Spark. Since the data in the dataset has different
repetition rates over various time intervals, we
present the repetition rate as time goes by in the low
part of the figure. The axis for the repetition rate is
shown at the right hand side of the y axis, while the
throughput of the original scheme and our proposed
scheme are indicated by diamond dots and circle dots
respectively.
We can observe that the repetition rates of the
real-world GPS trajectory data are not evenly
distributed. Obviously, under different repetition
rates, the improvement of throughput varies. Overall
speaking, the maximum of improvement is about 57
%, while the minimum of improvement is only about
2.6%. The least improvement happens when the
repetition rate is very low (about 9 %). Nevertheless,
our proposed scheme performs better in all cases of
the real dataset.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we propose a fast deduplication data
transmission scheme for parallel real-time computing
platform like Spark Streaming. The proposed scheme
does not need for the specialized data compression
technique. Therefore, CPU resource will not be
wasted to eliminate redundant chunk by compression
and decompression.
According to these experiments, we draw a
conclusion that our scheme works most effectively in
the following situations:
The average length of data block is long enough.
The length of fingerprint is shorter.
The repetition rate is higher.
The bandwidth is required to be high.
In the last experiment, we use real-world taxi GPS
trajectory dataset to prove that our method also works
well on real-world data.
In the future work, we wish to further optimize
our scheme. One of the possible directions is parallel
transmission. In fact, Spark can execute several
receivers to receive raw data. As we know, distributed
messaging system like Apache Kafka exploits
parallel transmission to send data in parallel to
improve performance. It will be an interesting issue
to follow. Additionally, the data preprocess can be
improved further.
Figure 5: Length of data block versus throughput.
Figure 6: Throughput versus repetition rate.
Figure 7: Fingerprint versus throughput (32-bit and 64-bit
versions).
Figure 8: Bandwidth experiment.
Fast Deduplication Data Transmission Scheme on a Big Data Real-Time Platform
163

Figure 9: Throughput for taxi GPS trajectory dataset.
ACKNOWLEDGEMENTS
This work is supported by NCSIST project under the
contract number of NCSIST-ABV-V101 (106).
REFERENCES
Dean, J., Ghemamat, S., 2008. MapReduce: Simplified Da
ta Processing on Large Clusters. Communications of th
e ACM, vol. 51, no. 1, pp. 07 - 13.
Shvachko, K., Kuang, H., Radia, S., Chansler, R., 2010. T
he Hadoop Distributed File System. In MSST’10, IEEE
Mass Storage Systems and Technologies.
Zaharia, M., Chowdhury, M., Franklin M., Shenkr, S., Stoi
ca. I., 2010. Spark: cluster computing with working set
s. In HotCloud’10.
Akyildiz, I., Su, W., Sankarasubramaniam, W., Cyirci, E.,
2002. A Survey on Sensor Networks. IEEE Communic
ations Magazine, vol. 40, no. 8.
Rivest, R., 1992. The MD5 Message-Digest Algorithm. IE
TF RFC 1320, April 1992; www.rfc-editor.org/rfc/rfc1
320.txt.
Eastlake, D., Jones, P., 2001. US secure hash algorithm 1 (
SHA1), IETF RFC 3174; www.rfc-editor.org/rfc/rfc31
74.txt.
Tridgell, A., Mackerras, P., 1998. The Rsync Algorithm. T
echnical Report TR-CS-96-05, Department of Comput
er Science, The Australian National University, Canbe
rra, Australia.
Odersky, M., Spoon, L., Venners, B., 2007. Programming
in Scala. Artima Press. Mountain View, CA., 1
st
editio
n.
Deutsch, P., Gailly, J., 1996. ZLIB compressed data forma
t specification version 3.3. IETF RFC 1950.
Levine, J., 2012. The ‘application/zlib’ and ‘application/gz
ip’ Media Types. IETF RFC 6713.
Collet, Y., 2016. xxhash. https://github.com/Cyan4973/xx
Hash.
Appleby, A., 2012. SMHasher & MurmurHash. https://gith
ub.com/aappleby/smhasher.
Yuan, J., Zheng, Y., Xie, X., Sun, G., 2011. Driving with k
nowledge from the physical world,” In KDD'11, 17th I
nternational conference on Knowledge Discovery and
Data mining.
Zadeh, L., 1965. Fuzzy sets. Information and Control, vol.
8.
Kreps, J., Narkhede, N., Rao, J., 2011. Kafka: A distribute
d messaging system for log processing.” In 6th Interna
tional Workshop on Networking Meets Databases, Ath
ens, Greece.
Seventh International Symposium on Business Modeling and Software Design
164
