
A Min-Max Tchebycheff based Local Search Approach for MOMKP
Imen Ben Mansour, Ines Alaya and Moncef Tagina
National School of Computer Sciences, COSMOS Laboratory, University of Manouba, Manouba, Tunis, 2010, Tunisia
Keywords:
Multi-objective Multidimensional Knapsack Problem, Iterated Local Search, Scalarization Functions,
Tchebycheff Functions.
Abstract:
The multi-objective multidimensional knapsack problem (MOMKP) which is one of the hardest multi-
objective combinatorial optimization problems, presents a formal model for many real world problems. Its
main goal consists in selecting a subset of items in order to maximize m objective functions with respect to
q resource constraints. For that purpose, we present in this paper a resolution approach based on a Min-Max
Tchebycheff iterated Local Search algorithm called Min-Max TLS. In this approach, we propose designing a
neighborhood structure employing a permutation process to exploit the most promising regions of the search
space while considering the diversity of the population. Therefore, Min-Max TLS uses Min-Max N (s) as
a neighborhood structure, combining a Min-Extraction-Item algorithm and a Max-Insertion-Item algorithm.
Moreover, in Min-Max TLS two Tchebycheff functions, used as a selection process, are studied: the weighted
Tchebycheff (WT) and the augmented weighted Tchebycheff (AugWT). Experimental results are carried out
with nine well-known benchmark instances of MOMKP. Results have shown the efficiency of the proposed
approach in comparison to other approaches.
1 INTRODUCTION
Many real-life optimization problems can hardly be
formulated as a mono-objective problem, which ex-
plains the permanent growing interest in the field of
multi-objective optimization. For instance, in trans-
portation problem there is more than one objective to
optimize. The cost of the transport, the duration and
the capacity of the transport, all of this could be objec-
tives to be optimized. In such problems, usually opti-
mizing one objective, leads to degrading other objec-
tives. Thus, finding a good trade-off between several
conflicting objectives is one of the main goals of the
multi-objective optimization problems (MOPs). So,
it consists in optimizing simultaneously several con-
flicting objectives in order to find a set of solutions
called Pareto front or set or non-dominated set.
The MOMKP modelizes many real world prob-
lems such as resource allocation (Shih, 2005), port-
folio optimization (Penn et al., 1994) and budget al-
location (Smeraldi and Malacaria, 2014). Moreover,
MOMKP can be modelized as a subproblem such as
the flight crew choice (Ehrgott and Ryan, 2002) and
many other general integer programs. To solve the
MOMKP, several approaches based on metaheuris-
tics were proposed in the literature: In (Zitzler et al.,
2002), Zitzler et al. introduced the well-known
SPEA2 which is an elitist algorithm, based on a
ranking dominance procedure. Deb et al. proposed
the NSGAII (Deb et al., 2002), another well-known
multi-objective evolutionary algorithm that is also an
elitist approach and uses a different ranking domi-
nance procedure. In (Lust and Teghem, 2008), a
memetic algorithm integrates a tabu search method,
called MEMOTS, was devised. A generic ACO algo-
rithm (m-ACO) was presented and instantiated with
four variants In (Alaya et al., 2007). m-ACO is pa-
rameterized by the number of ant colonies and the
number of the pheromone structures. Recently, an
indicator based ant colony approach which is abbre-
viated as IBACO is proposed in (BenMansour and
Alaya, 2015). The algorithm uses the indicator op-
timization principle to guide ants during their search
in the most promising areas by reinforcing the best
solutions by rewarding pheromone.
Related Works. Local search approaches have been
widely employed on the NP-hard multi-objective op-
timization problems, including problems formulated
as a multi-objective multidimensional knapsack prob-
lem (Alsheddy and Tsang, 2009), (Vianna and Dianin,
2013) and(Liefooghe et al., 2013). Indeed, its sim-
ple and practical appearance has enabled it to be ef-
ficient in many real-world problem such as railway
transportation, airline operations, portfolio optimiza-
140
Mansour, I., Alaya, I. and Tagina, M.
A Min-Max Tchebycheff based Local Search Approach for MOMKP.
DOI: 10.5220/0006433801400150
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 140-150
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tion and computer networks (Ehrgott and Gandibleux,
2004). Motivated by the success of these meth-
ods, several papers propose scalarization-based local
search methods for MOMKP. These methods have re-
ceived a great interest from the scientific community
because of their success for solving multi-objective
problems. They represent a simple way to trans-
form a multi-objective problem into one single or a
family of single objective optimization problems. In
(Lust and Teghem, 2012), Lust and Teghem present
the two-phase Pareto local search (2PPLS). The al-
gorithm uses a Pareto-based local search combined
with a very-large scale neighborhood method based
on vectors weight. The 2PPLS combines Pareto lo-
cal search and aggregation to solve MOMKP, it con-
sists of two main phases. Phase 1 generates an ap-
proximation of all the supported solutions by solving
a number of linear aggregation problems. Phase 2
applies a Pareto local search to every solution gen-
erated in Phase 1 to find non-supported Pareto opti-
mal solutions. In (Alves and Almeida, 2007), a ge-
netic algorithm based on Tchebycheff scalarization
function called MOTGA has been proposed. The al-
gorithm was applied to the MOMKP problem. The
Pareto front is divided into a few small parts. Each
part is approximated by a stage and each stage is
guided by a different Tchebycheff aggregation func-
tion. More recently, a memetic algorithm based on
decomposition (MOMAD) was proposed in (Ke et al.,
2014). MOMAD combines the ideas of the two ap-
proaches: the 2PPLS and the evolutionary algorithm
MOEA/D introduced in (Zhang and Li, 2007). In
MOMAD, a Pareto local search method is first ap-
plied for the neighborhood search then a single objec-
tive local search is applied to each perturbed solution.
Motivations and Contributions. From the pre-
viously mentioned state-of-the-art algorithms, one
can say that scalarization and weighted based meth-
ods present promising approaches to solve MOMKP.
In the literature, various efforts have been directed
toward the use of the metaheuristics to solve the
MOMKP. Generally, these approaches present a good
way to solve NP-hard problems. However, if a heuris-
tic searching method is used these approaches may
be very time consuming, especially for the large size
instances. So, the challenge is optimizing both the
quality results and the time-consuming. In this work,
we propose an iterated multi-objective local search
based on Tchebycheff function: Min-Max TLS for
MOMKP. In order to investigate the impact of the
choice of the Tchebycheff function on the selection
process, the two well-known Tchebycheff functions
are studied in this work: the weighted Tchebycheff:
WT (Bowman, 1976) and the augmented weighted
Tchebycheff: AugWT(Steuer and Choo, 1983).
Moreover, one of the key aspects that has to be con-
sidered is the neighborhood structure since it plays
a central role in a local search algorithm. Min-Max
TLS integrates an efficient weighted neighborhood
structure called Min-Max N (s) to explore the neigh-
borhood. Min-Max N (s) allows to establish an or-
der between items according to their profitability. It
has the goal of finding the item that minimizes an ex-
traction ratio to permute it with items that maximize
an insertion ratio in order to improve the quality of
the obtained solutions in a small computational time.
Furthermore, in weighted based methods, the genera-
tion of the weight vectors presents a significant point
and influences the quality of the generated solutions.
Thus, Min-Max TLS defines a weight vector genera-
tion method called Gw: Gradual weight vector gen-
eration method. Gw creates a set of weight vectors,
corresponding to search directions, guiding the search
gradually on almost all regions of the Pareto front.
The paper is organized as follows. In the next sec-
tion, we define the multi-objective optimization prob-
lems. In section 3, we present the multi-objective
multidimensional knapsack problem. In section 4,
the Tchebycheff functions used in this paper are de-
scribed. Section 5 presents our main contributions,
the proposed algorithm and its different main func-
tions. Then, in section 6, we discuss the experimental
results obtained from Min-Max TLS. Finally, in sec-
tion 7, we end the paper with the conclusion and our
perspectives.
2 MULTI-OBJECTIVE
OPTIMIZATION PROBLEMS
Before introducing the MOMKP, let us introduce
some useful notations and definitions related to a gen-
eral multi-objective optimization problem.
Let X denote the decision space of a general op-
timization problem, Z the corresponding objective
space and m objective functions f
1
,..., f
m
that assign
to each decision vector x ∈ X one objective vector
z=( f
1
(x),..., f
m
(x)) ∈ Z. In the following, we assume
that all objective functions are to be maximized:
• Definition 2.1. A solution z dominates a solution
z’, noted z z’, iff ∀ i ∈ {1, ...,m}, f
i
(z) ≥ f
i
(z’)
and ∃ i ∈ {1,..., m}, f
i
(z) > f
i
(z’);
• Definition 2.2. A solution z is called weakly non-
dominated, if there exists no z’ ∈ Z such that for
all i ∈ {1, ...,m}, f
i
(z’) > f
i
(z);
• Definition 2.3. A solution z is Pareto-optimal or
non-dominated, if a solution z’ dominates z does
A Min-Max Tchebycheff based Local Search Approach for MOMKP
141

not exist.
The goal of a MOP is to find the set of all non-
dominated solutions called Pareto set. When using a
metheuristic approach, the goal is to find a Pareto set
approximation.
3 MOMKP FORMULATION
The multi-objective multidimensional knapsack prob-
lem could be formulated as follows:
Maximize
n
∑
j=1
p
k
j
x
j
k = 1, ...,m (1)
Sub ject to
n
∑
j=1
w
i
j
x
j
≤ b
i
i = 1, ...,q (2)
x
j
∈ {0,...,1} j = 1, ..., n
where n is the number of items, for each item I
j
is
assigned a decision variable x
j
equal to 1 if the item
is selected, 0 otherwise. Each item I
j
has a profit p
k
j
relatively to the objective k and a weight w
i
j
relatively
to the resource i. The aim of the problem is to select
a subset of items in order to maximize m objective
functions while not exceeding q resource constraints.
b
i
is the total quantity available for the resource i.
In this paper, the considered instances assume that
the number of objective functions is equal to the num-
ber of resources (m=q).
4 TCHEBYCHEFF FUNCTIONS
For decomposing a multi-objective optimization
problem into one single-objective many scalariza-
tion functions exist. In following, we introduce two
among the most commonly-used methods based on
the Tchebycheff metric:
4.1 The Weighted Tchebycheff Function
W T (x|λ) = max
k=1...m
λ
k
| f
k
(x) − r
∗
k
| (3)
where x is the solution to evaluate, λ=(λ
1
...λ
m
) is
the weight vector, such that λ
k
≥ 0 for all k = 1...m
and
∑
m
k=1
λ
k
=1. The ideal point r
∗
= (r
∗
1
,...,r
∗
m
) is
used as a reference point, calculated as follows:
r
∗
k
= max
k=1...m
f
k
(x) (4)
The weighted Tchebycheff in (3) is minimized to
maximize each objective.
4.2 The Augmented Weighted
Tchebycheff Function
One of the main advantage of the weighted Tcheby-
cheff method is that by varying appropriately the
weight vectors and/or the reference point, every non-
dominated solution of the Pareto front of the stud-
ied MOP, explicitly includes non-convex and discrete
problems, can be found (Steuer, 1986). On the other
hand, the weighted Tchebycheff method generates
also the weakly non-dominated solutions which is of-
ten undesirable in MOP. In (Steuer and Choo, 1983),
Steuer and Choo suggested to add an l
1
-term, pa-
rameterized by ε, to W T (x|λ) that helps to avoid the
weakly non-dominated solutions. The resulting func-
tion is defined as follows:
AugWT (x|λ) = max
k=1...m
λ
k
| f
k
(x) − r
∗
k
|
+ ε
m
∑
k=1
λ
k
| f
k
(x) − r
∗
k
| (5)
where ε ≥ 0 is usually chosen as a small positive
number and r
∗
is calculated as defined in Eq. (4).
5 OUR PROPOSED APPROACH
MIN-MAX TLS: MIN-MAX
TCHEBYCHEFF BASED
LOCAL SEARCH
Let P be the current population of Min-Max TLS of
size N. Initially, a weight vector is selected from the
set V of H weight vectors, generated according to
the proposed Gw method. Then, for each solution
s of P the neighborhood is explored following the
proposed weighted neighborhood structure Min-Max
N (s), until a good solution is found i.e. one which
is better than at least the worst solution w in P in
terms of the used Tchebycheff function. This process
is iterated until all solutions in P are explored. All
the non-dominated solutions found during the local
search step are stored in the archive A. The algorithm
stops when a maximum number of iterations T max is
met and return the archive A. The algorithm 1 shows
a detailed description of the Min-Max TLS algorithm.
5.1 Weight Vectors Generation
In order to generate the set V , we propose the Gw
method: Let λ=(λ
1
...λ
m
) be the weight vector, such
that λ
k
≥ 0 for all k = 1...m and
∑
m
k=1
λ
k
=1. For the
bi-objective case, the weight vectors are calculated as
ICSOFT 2017 - 12th International Conference on Software Technologies
142
Algorithm 1: Min-Max TLS algorithm.
1: Begin
2: V ← Generate Weight Vectors (H)
3: repeat
4: P ← Perturbation(P , N)
5: A ← Non-dominated solutions(P )
6: λ ← SelectWeightVector (V , H)
7: for all s ∈ P do
8: repeat
9: U pdateRe f erencePoint
10: s
∗
← Neighborhood(s)
11: if Acceptance(s
∗
, w, P ) then
12: P
0
← Replace(s
∗
, w, P )
13: end if
14: until s
∗
6= w
15: end for
16: A ← Non-dominated solutions(A ∪ P
0
)
17: until T max is reached
18: End
follow:
λ
1
(t) = ln
4 ∗t ∗e
FQ
+ cos
2 ∗ π ∗t
FQ
(6)
λ
2
(t) = 1.0 − λ
1
(t) (7)
where t is the iteration index and e is exp (1). The
weight vectors are controlled by FQ, which is the
weight change frequency. If the FQ is well set, the
population can move smoothly from one point to an-
other thus the whole regions can be explored and al-
most all points covering the Pareto front can be found
through this appropriate variation of research orien-
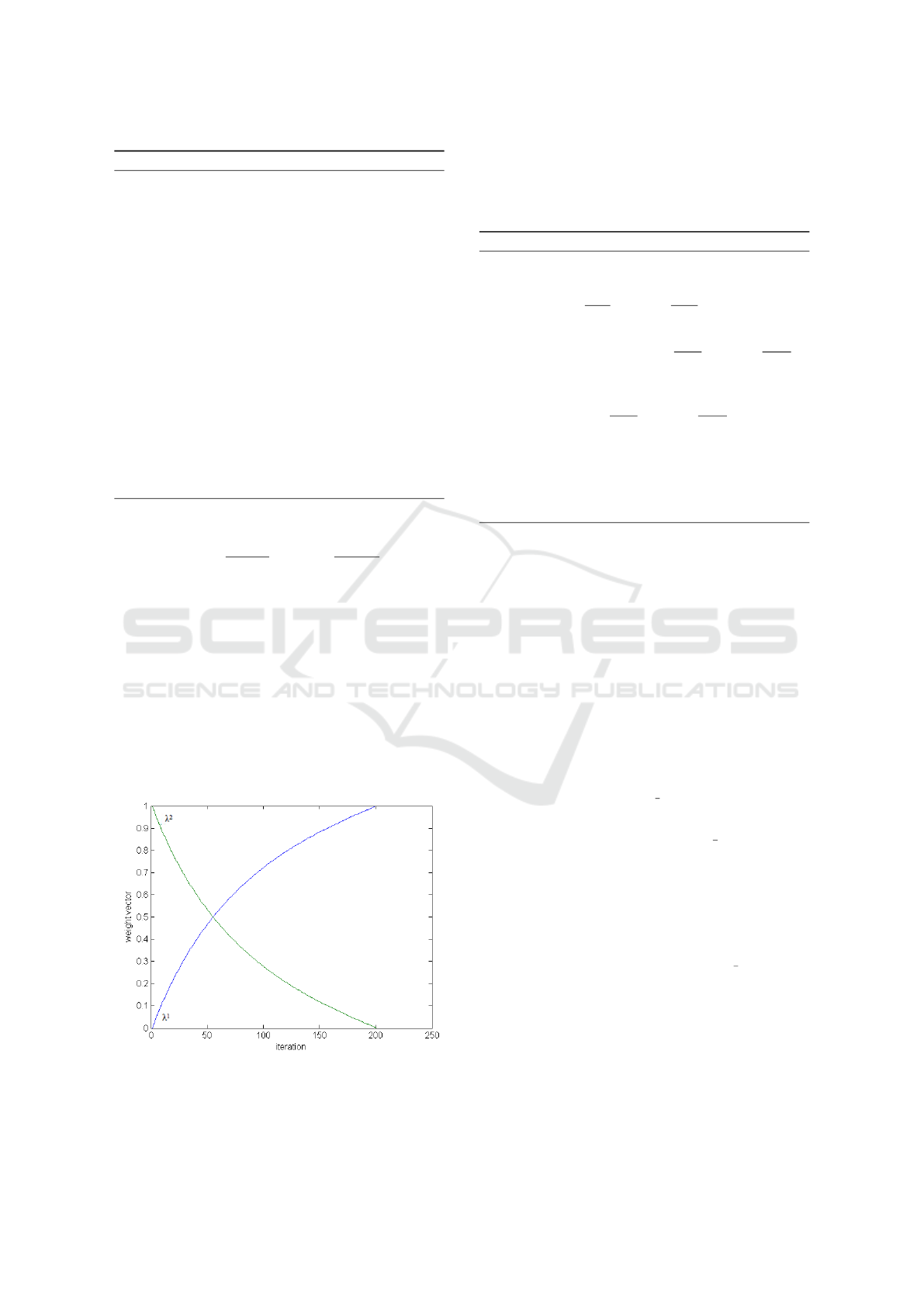
tations. Fig. 1 shows an example of how the weight
vector values λ
1
and λ
2
change within 200 iterations
during the local search process.
Figure 1: The weight vector value change within 200 itera-
tions.
The extension of the Gw method with more than
two objectives is theoretically straightforward. The
algorithm 2 shows the Gw, in case of m=4 objectives.
Algorithm 2: Gw algorithm.
1: Begin
2: for i f rom 0 to FQ/4 do
3: λ
1
=ln
h
4∗i∗e
FQ
+ cos
2∗π∗i
FQ
i
4: for j f rom 0 to FQ/4 do
5: λ
2
=(1.0−λ
1
)∗ln
h
4∗ j∗e
FQ
+ cos
2∗π∗ j
FQ
i
6: for k f rom 0 to FQ/4 do
7: λ
3
=(1.0 − λ
1
− λ
2
)*
8: ln
h
4∗k∗e
FQ
+ cos
2∗π∗k
FQ
i
9: λ
4
=1.0 − λ
1
− λ
2
− λ
3
10: end for
11: end for
12: end for
13: End
The algorithm 2 is executed only once before the
beginning of the main loop of Min-Max TLS. Once
the initial population is generated, a weight vector is
selected from the set V , according to its order of gen-
eration by the Gw method and assigned to the solu-
tion to be evaluated in such way that all the member
of the population have the same weight vector during
the same iteration.
5.2 Initial Population Initialization
Like in most evolutionary approaches, the first initial
population in Min-Max TLS is randomly created. In
Min-Max TLS, a solution s is composed of two sub-
sets I
+
l
={I
+
1
,I
+
2
,...,I
+
T
} and I
−
l
={I
−
1
,I
−
2
,...,I
−
NT
} where
I
+
l
is the subset of the items selected in the solution
s, T is the number of taken items, I
−
l
is the subset
of the remaining items (unselected items) and NT is
the number of untaken items. To create a first ran-
dom population, Min-Max TLS creates N random so-
lutions. Every solution s is created by selecting a ran-
dom item j among the n items and added it to the
solution s. If any resource capacity is violated by an
item j, the item is placed in the subset I
−
l
otherwise
the item is added to the subset I
+
l
. This process is
iterated until all items are placed.
5.3 Perturbation
After the update of the archive A, a new population is
generated. In order to reach different and new region
of the search space, where the exploration starts in the
A Min-Max Tchebycheff based Local Search Approach for MOMKP
143

next local search step, we propose to use a perturba-
tion function to generate the new population: At each
iteration, N new solutions are randomly selected from
the archive A if the size of A exceeds N, else if the
archive size is less than the size of the population, the
missing solutions are created randomly as done in the
first initial population. Let µ be the rate of noise, for
every solution s we remove randomly (µ ∗ T ) items
from the subset I
+
l
and we add them to the subset I
−
l
of the solution s. Then, as long as we do not violate
any resource constraints. Items are randomly added
from I
−
l
to I
+
l
. In fact, this random move allows us to
reach new local optima. They can be weak or strong
noise which means moving to a near local optima or
jump totally to a new region where it is considerably
difficult to find a new local optima.
5.4 Update Reference Point
When a new solution is introduced in the population,
the reference point r
∗
is updated. After the initializa-
tion process of the population and after each neigh-
borhood exploration, the new maximal value of all
objective functions is calculated according to Eq. (4).
5.5 Neighborhood Structure
The generation of the neighborhood is one of the
most important part of a local search algorithm. In
this paper, we use a proposed weighted neighbor-
hood structure Min-Max N (s). By means of the
two proposed algorithms: Min-Extraction-Item algo-
rithm and Max-Insertion-Item algorithm, Min-Max
N (s) tries to gives a better neighbor of a solution s.
5.5.1 Min-Extraction-Item
For each taken item I
+
l
the ratio U(l
+
) is calculated
as follows:
U(l
+
) =
∑
m
k=1
λ
k
(t)p
k
l
+
∑
q
i=1
w
i
l
+
(8)
where λ
k
(t) is the weight vector selected from the
set V ,
∑
m
k=1
λ
k
(t)p
k
l
+
is the weighted profit of the item
I
+
l
and
∑
q
i=1
w
i
l
+
its overall weight. The ratio U(l
+
)
measures the utility value of each item, the lower this
ratio is, the worst the item is.
Once the ratio U(l
+
) is calculated for all items
I
+
l
={I
+
1
,I
+
2
,...,I
+
T
}, a list L
U
containing all the items I
+
l
is created and sorted in ascending order according to
the ratio U(l
+
) of each item. So that the worst items
that minimize the ratio U (l
+
) are placed on the top of
the list. The algorithm 3 outlined the Min-Extraction-
Item algorithm. This algorithm is executed only when
a new solution s is selected for neighborhood explo-
ration.
Algorithm 3: Min-Extraction-Item algorithm.
1: Begin
2: for l
+
f rom 1 to T do
3: Compute U(l
+
)
4: Add Item I
+
l
to L
U
5: end for
6: Sort L
U
in ascending order
7: End
5.5.2 Max-Insertion-Item
For each untaken item I
−
l
the ratio U(l), inspired from
(Alaya et al., 2004), is calculated. We define R
i
(s)=b
i
-
∑
T
l=1
w
i
l
as the remaining quantity of the resource i
after the construction of the solution s. The ratio
U(l)
of an item I
−
l
can be calculated as follows:
U(l) =
∑
m
k=1
λ
k
(t)p
k
l
∑
q
i=1
w
i
l
R
i
(s)
(9)
where p
k
l
and w
i
l
are respectively the profit and the
weight of the candidate item. The ratio U (l) measures
the quality of the candidate item according to the so-
lution s where the higher this ratio is, the better the
item is.
As done with the taken items in the Min-
Extraction-Item algorithm, a list L
U
containing all
the candidate items I
−
l
is created and sorted in de-
creasing order according to the ratio U(l) of each
item. So that the most profitable items that maximize
the ratio U(l) are placed on the top of the list. The al-
gorithm 4 outlines the Max-Insertion-Item algorithm.
Algorithm 4: Max-Insertion-Item algorithm.
1: Begin
2: for l f rom 1 to NT do
3: Compute U(l)
4: Add Item I
−
l
to L
U
5: end for
6: Sort L
U
in decreasing order
7: End
5.5.3 Min-Max N (s)
A neighbor s
∗
is created by removing an item from
the list L
U
and adding items from the list L
U
as long
as no resource constraint is violated. The algorithm 5
describes the generation of a neighbor of a solution s.
ICSOFT 2017 - 12th International Conference on Software Technologies
144
Algorithm 5: Min-Max N (s).
1: Begin
2: Min-Extraction-Item(T )
3: while s
∗
is the worst do
4: Max-Insertion-Item(NT )
5: s
∗
← Remove L
U
(l
+
) f rom s
6: while no constraint is violated do
7: s
∗
← Add L
U
(l) to solution s
8: end while
9: end while
10: End
5.6 Acceptance Criterion and
Replacement Function
In the local search algorithms, the neighborhood ex-
ploration stops at the first better solution or when the
entire neighborhood is explored. In this work, we
choose to stop the exploration once the first better
neighbor is found relatively to the used Tchebycheff
function. This choice is guided by one main reason
is that this mechanism allows to speed up the conver-
gence of the population.
The neighbor s
∗
is accepted in the population if
its fitness value, calculated according to the Weighted
Tchebycheff function (Eq. 3) or the Augmented
Weighted Tchebycheff function (Eq. 5), is better than
the worst solution w in the current population. If so,
s
∗
replaces the worst solution w. Otherwise the neigh-
bor is rejected, the next item on the list L
U
is selected,
i.e. the item to be removed from the solution s, and
the algorithm 5 is executed again. This process is it-
erated until a neighbor s
∗
better than at least the worst
solution w is found.
6 EXPERIMENTAL RESULTS
The experiments carried out consider two versions
of Min-Max TLS: Min-Max TLS
W T
and Min-Max
TLS
AugW T
where the solutions are evaluated using
respectively the Weighted Tchebycheff function and
the Augmented Weighted Tchebycheff function. In
order to evaluate the quality of the proposed algo-
rithm and to have a fair comparison, we choose to
compare the two proposed versions of Min-Max TLS
with scalarizition-local search-based methods : the
MOMAD (Ke et al., 2014), the 2PPLS algorithm
(Lust and Teghem, 2012) and the MOTGA (Alves and
Almeida, 2007). For both of the two versions as well
as the compared algorithms, we considered the bench-
mark instances defined in (Zitzler and Thiele, 1999),
that are widely used in testing several multi-objective
heuristics, containing nine instances with 250, 500
and 750 items, in combination with 2, 3 and 4 ob-
jectives.
6.1 Experimental Setup
The used parameter settings for Min-Max TLS are ad-
justed experimentally and presented as follow: The
population size N is set to 10, we choose a small
rate noise µ=0.05 to apply on selected solutions in or-
der to focus the search around the most useful solu-
tions. The parameter ε used in the AugWT function
is set to 10
−3
as suggested in (Steuer, 1986), to ensure
that weakly non-dominated solutions are avoided and
that all non-dominated solutions of the studied (poten-
tially non-convex) problem can be found. The change
frequency FQ is set according to the Table 1. In order
to let the weight vectors change smoothly from one
iteration to another and so the whole Pareto front will
be explored, the number of generated weight vectors
H and the stopping criterion T max is set to FQ/4
m−1
.
The MOMAD, 2PPLS and MOTGA were configured
as recommended by their authors, for each algorithm
and each instance 30 runs are considered.
Table 1: The change frequency FQ Setting.
Number of Objectives FQ
2 800
3 40
4 20
6.2 Performance Metrics
In order to evaluate the results generated by the dif-
ferent algorithms, we used three measures:
• The hypervolume Difference: which computes
the difference between a reference set, which cor-
responds to the set of the non-dominated solutions
obtained from the union of all solutions of the dif-
ferent runs, and the set of solutions to be evaluated
in terms of hypervolume as defined in (Zitzler and
Thiele, 1999). The obtained values have to be as
close as possible to zero to prove the efficiency of
an algorithm against the other approaches;
• The Mann-Whitney Statistical Test: (Knowles
et al., 2005) is applied to the results obtained by
the hypervolume difference in order to prove that
the difference between two algorithms are statis-
tically significant. We reject the null-hypothesis
”no significant difference between the two algo-
rithms A and B” if the P-value is lower than the
significance level 5%;
A Min-Max Tchebycheff based Local Search Approach for MOMKP
145

• The summary Attainment Surface: (Grunert Da
Fonseca et al., 2001) is used to compare the ap-
proach behaviors in a graphical way. The attain-
ment surface is defined by the objective vectors
that have been attained by at least one approxima-
tion set of the tested algorithm. In the following
we compare the median (50%) attainment surface
of the fronts non-dominated solutions found for
30 runs of all the compared algorithms.
All the computational results were obtained by the
performance assessment software package PISA pro-
vided in http://www.tik.ee.ethz.ch/sop/pisa/.
6.3 Comparison Results
We performed 30 independent runs of each compared
algorithm on all the tested instances. In order to
have a good idea of the overall performance of each
approach, the average hypervolume is computed for
each algorithm and each instance. The hypervolume
difference results of the proposed algorithms Min-
Max TLS
W T
and Min-Max TLS
AugW T
, and the com-
pared algorithms MOMAD, 2PPLS and MOTGA ap-
pear in Table 2. Moreover, the Table 2 represents
the results obtained by the Mann-Whitney statistical
test. The M-W.T column contains the number of the
algorithm which is statistically outperformed by the
corresponding algorithm. For example, on the 2x250
instance, Min-Max TLS
W T
statistically outperformed
the algorithm number 3 and the algorithm number 5
which correspond to the MOMAD algorithm and the
MOTGA algorithm respectively. ” ” means that the
corresponding algorithm does not statistically outper-
form any other algorithm, as is the case with 2PPLS
on the 2x750 instance. mxn denotes the tested in-
stance, m is the number of objectives, n is the num-
ber of items and (N/A) denotes that the results are not
available.
By analyzing the Table 2, it is clear that our pro-
posed approach performs better than the other com-
pared algorithms. In fact, Min-Min TLS gives bet-
ter hypervolume difference results than MOMAD on
all the tested instances and better than MOTGA in
eight out of nine instances. Moreover, it seems that
the average results of MOMAD and MOTGA de-
crease according to the size of the problem. For
the largest and hardest instances, the quality of the
obtained results of MOMAD and MOTGA decease
clearly which is not the case of Min-Max TLS. Thus,
the difference between the compared approaches be-
came much more important with the largest instances.
By comparing Min-Max TLS with 2PPLS on the three
bi-objective instances, the two approaches obtained
about the same hypervolume values except on the
2x500 instance where 2PPLS preforms better than
Min-Max TLS. By analyzing the results of the Mann-
Whitney statistical test shown in the Table 2, the first
important information that we can extract from the
table is that Min-Max TLS outperforms significantly
MOMAD and MOTGA on all the largest and hard-
est instances with 3 and 4 objectives. However, MO-
MAD and MOTGA never significantly outperform
the results returned by the proposed approach on these
instances. From the three bi-objective instances, we
can observe that Min-Max TLS outperforms signifi-
cantly MOMAD and MOTGA on 2x750 and 2x250
instances. On the 2x500 instance, Min-Max TLS out-
performs only MOMAD.
Fig. 2 compares the average hypervolume differ-
ence of Min-Max TLS
W T
and Min-Max TLS
AugW T
according to the number of objectives. This figure
shows clearly the behaviors of the two versions. As
it was previously remarked, the hypervolume values
of Min-Max TLS
W T
are slightly better than Min-Max
TLS
AugW T
on the smallest instances (2 and 3 objec-
tives with 250 and 2 objectives with 500 items) while
with the largest instances with 4 objectives and with
500 and 750 items, Min-Max TLS
AugW T
find slightly
better values than Min-Max TLS
W T
. As a conclusion,
one can say that, according to the Table 2 and figure 2,
Min-Max TLS
AugW T
slightly outperforms Min-Max
TLS
W T
for 5 out of the 9 instances in terms of the
average hypervolume difference but statistically there
is no significant difference between the two versions:
Min-Max TLS
W T
and Min-Max TLS
AugW T
.
Table 3 gives the average computational time con-
sumed by each algorithm in seconds. From the ta-
ble, it is clear that our proposed approach Min-Max
TLS consumes significant shorter CPU time than the
other approaches. In fact, the time consumed by
Min-Max TLS is shorter than the other approaches
for some instances about 8 times. When comparing
the CPU time of Min-Max TLS
W T
against Min-Max
TLS
AugW T
, one can observe that the two algorithms
consume almost the same running time. Nevertheless,
Min-Max TLS
AugW T
consumes slightly more running
time than Min-Max TLS
W T
on the same instances.
Fig. 3 shows the median attainment surfaces of
the approximation sets returned by the two versions
Min-Max TLS
W T
and Min-Max TLS
AugW T
, MO-
MAD, 2PPLS and MOTGA for the bi-objectives in-
stances 2x250, 2x500 and 2x750. The first impor-
tant remarque that can be observed from this fig-
ure is that all the tested approaches provide a well-
distributed Pareto front where the obtained points
cover almost all the Pareto front. For the instance con-
taining 250 items, the surfaces are almost confused,
it is difficult to distinguish the algorithms. For the
ICSOFT 2017 - 12th International Conference on Software Technologies
146
Table 2: Hypervolume Difference Average Values and Mann-Whitney Statistical Test Results.
Instances Min-Max TLS
W T
Min-Max TLS
AugW T
MOMAD 2PPLS MOTGA
Algorithm Number 1 2 3 4 5
Avg M-W.T Avg M-W.T Avg M-W.T Avg M-W.T Avg M-W.T
2x250 2.35E-01 3,5 2.52E-01 3 3.16E-01 2.32E-01 2.72E-01
2x500 1.93E-01 3 2.16E-01 3 3.56E-01 1.20E-01 1,2 1.41E-01 1,2
2x750 2.14E-01 3,5 2.13E-01 3,5 3.00E-01 2.10E-01 2.90E-01
3x250 2.12E-01 3,5 2.21E-01 3,5 3.93E-01 N/A 3.29E-01
3x500 2.27E-01 3,5 2.16E-01 3,5 4.56E-01 N/A 3.96E-01
3x750 1.91E-01 3,5 1.96E-01 3,5 4.31E-01 N/A 2.90E-01
4x250 2.20E-01 3,5 2.18E-01 3,5 3.76E-01 N/A 3.79E01
4x500 1.93E-01 3,5 1.84E-01 3,5 3.97E-01 N/A 3.97E-01
4x750 1.88E-01 3,5 1.76E-01 3,5 4.59E-01 N/A 4.27E-01
Table 3: Average CPU Time of Min-Max TLS
W T
, Min-Max TLS
AugW T
, MOMAD, 2PPLS and MOTGA in seconds.
Instances Min-Max TLS
W T
Min-Max TLS
AugW T
MOMAD 2PPLS MOTGA
2x250 0.6 0.8 5.2 3.1 0.9
2x500 1.9 2.3 15.5 14.8 3.3
2x750 4.0 4.3 23.5 25.1 9.6
3x250 1.0 1.0 7.5 N/A 8.8
3x500 3.4 3.7 19.1 N/A 15.2
3x750 5.8 6.4 35.7 N/A 40.7
4x250 4.8 5.0 10.7 N/A 8.6
4x500 13.6 16.1 25.5 N/A 27.4
4x750 24.3 28.8 45.7 N/A 43.2
other instances, the surfaces of MOMAD, 2PPLS and
MOTGA are slightly above the surfaces returned by
Min-Max TLS
W T
and Min-Max TLS
AugW T
on a small
middle region of the Pareto front. While through-
out the extremity, both of the surfaces of Min-Max
TLS
W T
and Min-Max TLS
AugW T
are close to those of
MOMAD, 2PPLS and MOTGA. We note that there
is no clear difference between the surfaces obtained
by Min-Max TLS
W T
and Min-Max TLS
AugW T
. Thus,
this graphic confirms the numerical results obtained
previously, where we have found that, generally, for
the bi-objective instances the compared algorithms
are not significantly different.
6.4 Discussion
As a conclusion of this experimentation section, the
results have shown that the proposed approach per-
forms better than the compared approaches. When
evaluating the Min-Max TLS algorithm for solving
the MOMKP, some useful conclusions can be ex-
tracted. First, the Min-Max TLS performs statistically
better especiallly for the largest and hardest instances
where the best values for the instances with 3 and 4
objectives are found by the two versions of Min-Max
TLS. Second, the difference between the two versions
Min-Max TLS
W T
and Min-Max TLS
AugW T
is very
small. Min-Max TLS performs slightly better using
AugWT function. Third, Min-Max TLS
AugW T
needs
more computational time than Min-Max TLS
W T
. In
fact, the augmented weighted Tchebycheff version
consumes slightly more CPU time than the weighted
Tchebycheff version, especially with the largest in-
stances but produces better results.
Finally, let us mention that the efficiency of the
proposed approach is due to many factors: the pro-
posed Gw method, the perturbation function, the
neighborhood structure, the acceptance criterion and
the replacement strategy. The Gw method has a sig-
nificant role in Min-Max TLS. Like any weighted ap-
proach, the selection of the weights can lead to a bet-
ter performance. In fact, the Gw method tries to ap-
propriately varying the search directions, all the mem-
ber of population attempt to target almost all parts
on the Pareto front. Hence, different Pareto-optimal
points can be obtained. Furthermore, the initializa-
tion of the local search population is a very impor-
tant function. The used perturbation function allows
to generate a new population using information about
the good solutions obtained during the previous it-
erations. Also, the neighborhood structure is a cru-
cial part of the local search algorithm. Here, the pro-
posed Min-Max N (s) tries to remove the least valu-
able item and replace it with the most profitable items
according to the current solution. Therefore, it pro-
vides an efficient way to speed up the search while
leading the algorithm to converge. Lastly, the accep-
tance criterion and the replacement strategy. The used
replacement strategy in this work is a convergence-
promoting mechanism, it favors exploitation. While
the acceptance criterion, which can be considered as a
diversity-promoting mechanism, favors more the ex-
A Min-Max Tchebycheff based Local Search Approach for MOMKP
147
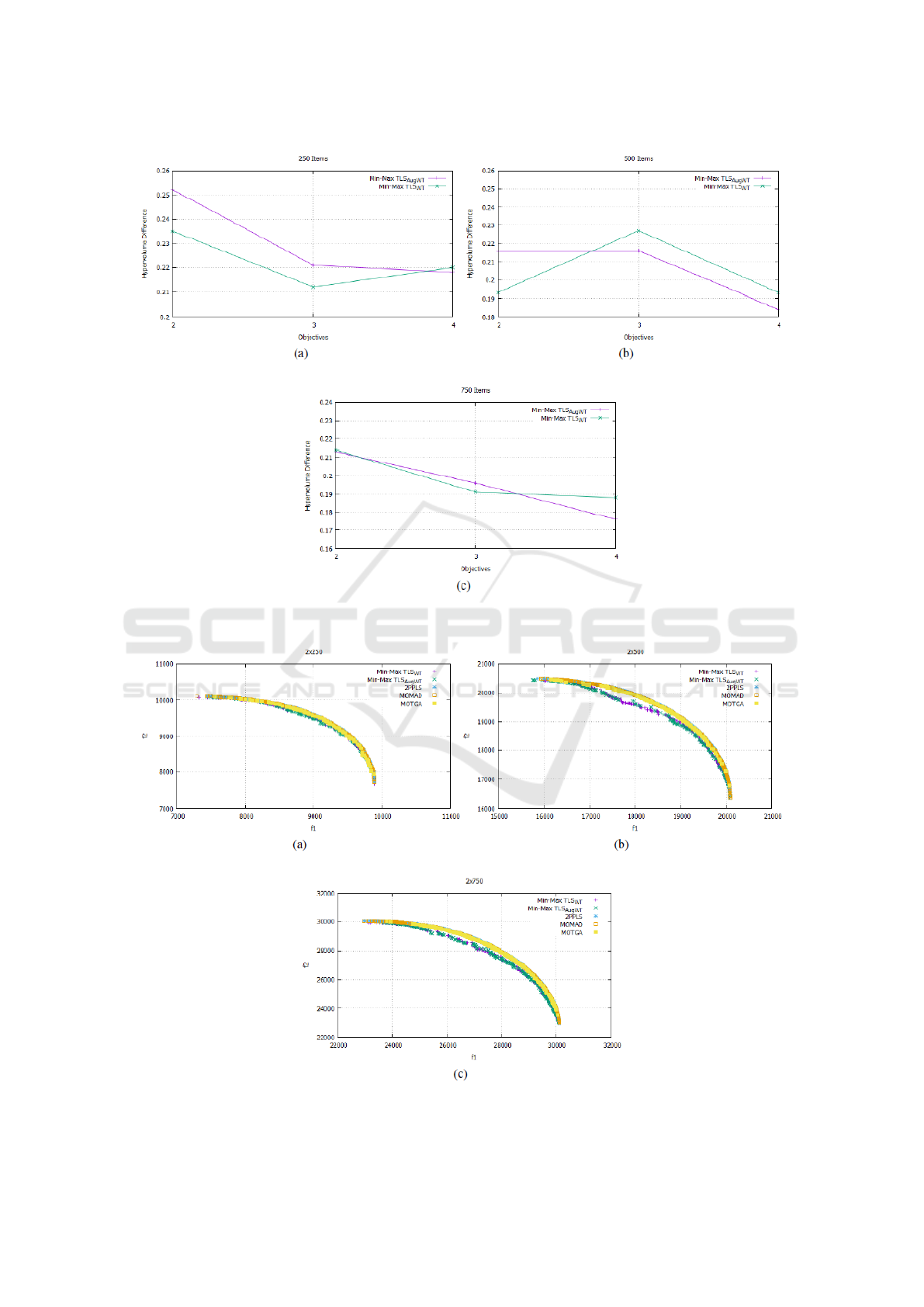
Figure 2: Average Hypervolume Difference of Min-Max TLS
W T
and Min-Max TLS
AugW T
with (a) 250, (b) 500 and (c) 750
Items.
Figure 3: Illustration of the Median Attainement Surfaces Obtained by Min-Max TLS
W T
, Min-Max TLS
AugW T
, MOMAD,
2PPLS, MOTGA with (a) 2x250, (b) 2x500 and (c) 2x750 Instances.
ICSOFT 2017 - 12th International Conference on Software Technologies
148

ploration. Thus, both of them help to provide a good
balance between exploration and exploitation during
the search process.
7 CONCLUSION AND
PERSPECTIVES
In this paper, we have presented a new multi-objective
local search using the scalarization concept. The
proposed approach Min-Max TLS has proved its ef-
ficiency for solving the multi-objective multidimen-
sional knapsack problem in comparison with three of
the well-known state-of-the-art algorithms. In fact,
Min-Max TLS is significantly better than the com-
pared algorithms on almost all the tested instances.
In addition, experimental results have shown the per-
formance of the two proposed versions of Min-Max
TLS on a short processing time. As improvement of
this work, one potential direction of future research
would be to combine Min-Max TLS with another
metaheuristic method as the ant colony approach.
This metaheuristic could replace the initial population
function, since the use of an ant colony approach com-
bined with a local search method is known to perform
well on many problems. Another perspective of this
work is to apply this approach for solving other multi-
objective optimization problems. In fact, it would be
interesting to adapt Min-Max TLS to other optimiza-
tion problem to investigate its scalability and to have
an overview of its efficiency.
ACKNOWLEGMENT
We are grateful to the anonymous reviewers for their
insightful comments to improve our paper.
REFERENCES
Alaya, I., Solnon, C., and Gh
´
edira, K. (2004). Ant al-
gorithm for the multi-dimensional knapsack problem.
Proceedings of International Conference on Bioin-
spired Optimization Methods and their Applications
(BIOMA), 1:63–72.
Alaya, I., Solnon, C., and Gh
´
edira, K. (2007). Ant colony
optimization for multi-objective optimization prob-
lems. 19th IEEE International Conference on Tools
with Artificial Intelligence (ICTAI’07), 1:450–457.
Alsheddy, A. and Tsang, E. (2009). Guided pareto local
search and its application to the 0/1 multi-objective
knapsack problems. Proceedings of the eighth meta-
heuristic international conference (MIC09).
Alves, M. J. and Almeida, M. (2007). MOTGA: A multi-
objective tchebycheff based genetic algorithm for the
multidimensional knapsack problem. Computers &
OR, 34(11):3458–3470.
BenMansour, I. and Alaya, I. (2015). Indicator based
ant colony optimization for multi-objective knapsack
problem. Knowledge-Based and Intelligent Informa-
tion & Engineering Systems 19th Annual Conference,
60:448–457.
Bowman, V. J. (1976). On the relationship of the tcheby-
cheff norm and the efficient frontier of multiple-
criteria objectives. In H. Thieriez and S. Zionts, ed-
itors, Multiple Criteria Decision Making, 1:76–85.
Deb, K., Pratap, A., S.Agarwal, and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
NSGA-II. IEEE Transaction on Evolutionary Com-
putation, 6(2):181–197.
Ehrgott, M. and Gandibleux, X. (2004). Approximative so-
lution methods for multiobjective combinatorial opti-
mization. Top, 12:1–63.
Ehrgott, M. and Ryan, D. M. (2002). Constructing robust
crew schedules with bicriteria optimization. Journal
of Multi-Criteria Decision Analysis, 11(3):139–150.
Grunert Da Fonseca, V., Fonseca, C. M., and Hall,
A. O. (2001). Inferential performance assessment
of stochastic optimisers and the attainment function.
1st International Conference on Evolutionary Multi-
criterion Optimization (EMO 2001)Lecture Note in
Computer Science, Springer, pages 213–225.
Ke, L., Zhang, Q., and Battiti, R. (2014). A simple
yet efficient multiobjective combinatorial optimiza-
tion method using decompostion and pareto local
search. IEEE Trans on Cybernetics.
Knowles, J. D., Thiele, L., and Zitzler, E. (2005). A tutorial
on the performance assessment of stochastive multi-
objective optimizers. Technical report TIK-Report.
Liefooghe, A., Paquete, L., and Figueira, J. (2013). On
local search for bi-objective knapsack problems. Evol.
Comput., 21(1):179–196.
Lust, T. and Teghem, J. (2008). Memots: a memetic algo-
rithm integrating tabu search for combinatorial mul-
tiobjective optimization. RAIRO - Operations Re-
search, 42:3–33.
Lust, T. and Teghem, J. (2012). The multiobjective multi-
dimensional knapsack problem: a survey and a new
approach. International Transactions in Operational
Research, 19:495–520.
Penn, M., Hasson, D., and Avriel, M. (1994). Solving the
0/1 proportional knapsack problem by sampling. J.
Optim Theory Appl., 80:261–272.
Shih, H. (2005). Fuzzy approach to multilevel knapsack
problems. Computers and Mathematics with Applica-
tions, 49:1157–1176.
Smeraldi, F. and Malacaria, P. (2014). How to spend it:
Optimal investment for cyber security. Proceedings of
the 1st International Workshop on Agents and Cyber-
Security.
Steuer, R. E. (1986). Multiple Criteria Optimization: The-
ory, Computation and Application. John Wiley, New
York.
A Min-Max Tchebycheff based Local Search Approach for MOMKP
149

Steuer, R. E. and Choo, E. U. (1983). An interactive
weighted tchebycheff procedure for multiple objective
programming. Mathematical Programming, pages
326–344.
Vianna, D. S. and Dianin, M. F. (2013). Local search
based heuristics for the multiobjective multidimen-
sional knapsack problem. Production journal, 1:478–
487.
Zhang, Q. and Li, H. (2007). MOEA/D: a multiobjective
evolutionary algorithm based on decomposition. IEEE
Transactions Evolutionary Computation, 11:712–731.
Zitzler, E., Laumanns, M., and Thiele, L. (2002). SPEA2:
improving the strength pareto evolutionary algorithm
for multiobjective optimization. In Giannakoglou, K.
et al., editors, Evolutionary Methods for Design, Op-
timisation and Control with Application to Industrial
Problems (EUROGEN 2001), volume 1, pages 95–
100. International Center for Numerical Methods in
Engineering (CIMNE).
Zitzler, E. and Thiele, L. (1999). Multiobjective evolu-
tionary algorithms: A comparative case study and the
strength pareto approach. IEEE Transactions on Evo-
lutionary Computation, 1:257–271.
ICSOFT 2017 - 12th International Conference on Software Technologies
150
