
Multi-objective Dynamical System Parameters and Initial Value
Identification Approach in Chemical Disintegration Reaction
Modelling
Ivan Ryzhikov, Christina Brester and Eugene Semenkin
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University, Krasnoyarsk, Russia
Keywords: Multi-output System, Linear Differential Equation, Multi-objective Optimization, Parameters Identification,
Initial Value Estimation.
Abstract: A multi-criteria multi-output dynamical system identification problem is considered. The inverse
mathematical problem of estimating the parameters of a system of differential equations and its initial point
using the measured data is provided for the hexadecane disintegration reaction. The aim of modelling is to
approximate the dynamical behaviour of hexadecane and the concentrations of its products, which
according to chemical kinetics are determined by a differential equation. Since the dynamical model
adequacy is based on the error between its output and the sample data and the output itself depends on the
initial point values, the inverse mathematical modelling problem is the simultaneous estimation of the model
parameters and the initial point. At the same time, the initial point is unknown and the sample data is noisy,
and for this reason, the inverse mathematical modelling problem is reduced to a two-objective optimization
problem. The reduced problem is a sample of black-box optimization problems; it is complex, multimodal
and requires a reliable technique to solve it. This is why a specific heterogeneous multi-objective genetic
algorithm with the island meta-heuristic is used and its efficiency in solving this problem is proved by the
investigation results.
1 INTRODUCTION
The inverse mathematical modelling problem for
dynamical systems is a problem of current
importance. It has many applications in different
scientific fields, including chemistry, robotics,
mechanics, information science, biology and
financial mathematics. There are many different
problem statements and most of them are solved by
finding the solution of the reduced optimization
problem. In general, these optimization problems are
so-called black-box optimization problems and, in
this case, the model determination using a set of
parameters and the extremum seeking algorithm are
the most important objects to develop and improve.
In this study, we consider a multi-output system
without any control input, but with the vector on the
right-hand side for the process of hexadecane
disintegration. The proposed approach is applicable
to a linear dynamical system with many control
inputs, but in this study, the investigated systems
have no control inputs and so these inputs were set
as unit-step functions. Our aim is to build a
mathematical model of the hexadecane and the
functions of its disintegration product
concentrations, which would give the information
about the amount of acids at different time points in
the process. Two different process types were
considered: diffusion and static, and for each type
different disintegration reaction products were
considered.
The problem of estimating the parameters of the
differential equation using evolutionary, stochastic
and other heuristic approaches can be found in many
studies. Commonly, evolution-based and nature-
inspired algorithms are reliable solvers of reduced
optimization problems of different natures. Single-
objective and multi-objective optimization problems
appear in estimating the parameters of dynamical
systems in many different studies. Methods of
solving the parameter identification problem with
heuristic algorithms of these classes can be found in
many different studies.
There is a significant difference between solving
one-criterion and multi-objective optimization
Ryzhikov, I., Brester, C. and Semenkin, E.
Multi-objective Dynamical System Parameters and Initial Value Identification Approach in Chemical Disintegration Reaction Modelling.
DOI: 10.5220/0006431504970504
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 497-504
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
497

problems and a significant difference in the solution
of the optimization problem. For the multi-objective
optimization problem, an approximation of the
Pareto front is required, or, in other words, the set of
non-dominated solutions. The reason why we need
to reduce the inverse mathematical modelling
problem to a multi-objective optimization problem is
the impossibility of estimating the system
parameters without its initial value for dynamical
systems.
The current study is based on the works
described in (Ryzhikov and Semenkin, 2017) and
(Ryzhikov et al., 2016), where the initial point and
the system coefficients were estimated by solving
the optimization problem, but for a single criterion.
The approach proposed in this study is an extension
of previous ones and allows different initial value
estimations to be used. Because of the sample size,
which is small, the initial value was compared with
the first measurements in the sample, but in a
general case, it can be compared with some average
value, its statistical estimation or some expected
value given by an expert, which makes the proposed
approach flexible and useful.
It is widely known that each particular problem
requires specific problem-oriented optimization
algorithm modifications or meta-heuristics, which
provide an improvement in the algorithm
performance. In this study, we propose a dynamical
system and initial value vector determination, and
form an unconstrained extremum problem on a real
value vector field.
In our consideration of the multi-objective
optimization problem, there is a need for a reliable
multi-objective optimization tool. The multi-criteria
cooperative heterogeneous genetic algorithm with
the island meta-heuristic has been chosen, because
this algorithm has proved its performance in the
solving of many multi-criteria optimization
problems of different natures. Experimental results,
which are presented in various figures, show that
this algorithm is applicable to the considered
problem and achieves a very good result.
2 MULTI-OUTPUT DYNAMICAL
SYSTEM IDENTIFICATION
PROBLEM
In this chapter, we consider the problem statement
and related real problem. The hexadecane
disintegration reaction consists in the forming of
different components: spirits, carbonyl components,
lactones and acids for the diffusion reaction and
spirits and carbonyl compounds for the static
reaction. We assume that the concentrations of
products and the hexadecane itself are related and
affect one another. The influence of each
disintegration reaction component concentration on
other component concentrations can be
mathematically determined by the addition of some
coefficient to the particular equation. The process of
how the concentration changes is dynamical and
linear, and in this case it is also assumed in chemical
kinetics theory that the concentrations can be
determined with a linear differential equation of the
first order.
Let a set
,, 1,
ii
Yt i s , be a data sample, where
n
i
YR is the dynamical system output
measurements at the time point
i
t ,
s
is the size of
the sample and
n
is the system output dimension.
As was mentioned above, the solution of the inverse
mathematical problem is a differential equation and
the initial point, so we assume that the real system
output
1
...
n
X
txt xt is determined by
the Cauchy problem:
11,11 1, 1nn
x
taxt axtb
,
…,
,1 1 ,nn nnnn
x
taxt axtb
00
15
0...
T
X
xx .
(1)
where
,
,1,
ij
aij n are the system coefficients
and
0x is the initial point. The system parameters
and the initial point coordinates, generally, are
unknown and to be estimated.
We use the following notation for the
concentration functions of the chemical reaction
products: hexadecane, spirits, carbonyl compounds,
lactones and acids and similar notation for the static
chemical reaction.
We also know that the output data
,1,
i
Yi s is
distorted by the additive noise
:()0,()ED
:
() , 1,
iii
YXt i s.
(2)
where the
X
t function is a solution of the Cauchy
problem (1).
Let the model be determined by the given
problem: a differential equation in a matrix form and
the initial value vector (we know the number of
system outputs n )
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
498

ˆ
ˆ
ˆˆ
dX
A
Xt B
dt
,
1
ˆ
ˆˆ
00...0
n
Xx x
,
(3)
where
A
ˆ
is a system matrix, B
ˆ
is a vector of
coefficients and
)0(
ˆ
X is an initial point.
It can be seen that the solving of the inverse
mathematical modelling problem is related to the
parameters and initial point estimation problems on
the basis of the sample data, which consists of noisy
output measurements. Moreover, the sample size for
some particular problems is small and the sample
data is flat. These data characteristics make many
estimation approaches useless, and require specific
tools, which would provide the simultaneous
estimation of the parameters and the initial point.
Since there is a cross influence between the
parameters and the initial point, but at the same time
the values of these variables are estimated and based
on the sample data, we require not just a criterion,
which minimizes the error between the data and the
model output, but also a number of criteria.
One of the proposed criteria is the distance
between the sample data and the model output
1
ˆ
ˆˆ
,, 0
11
ˆ
min
sn
iji
j
AB X
ij
j
YXt
C
D
,
(4)
where
ˆ
X
t is the solution of the Cauchy problem
(3) for matrix
ˆ
A
, vector
ˆ
B
and ,1,
j
Dj n is a
proposed norming value
max min
ji i
j
j
i
i
DY Y.
The second criterion is the distance between the
initial point estimation and the sample
20
ˆ
0
ˆ
0min
X
CYX .
(5)
The concentrations according to the physical
meaning of this term cannot be negative; to achieve
this, we add the penalty function into the criterion
(4) and criterion (5) with some penalty coefficients.
The penalty function is defined by the expression
,0
0, 0
zz
Pz
z
.
(6)
Finally, we receive the following criteria for the
multi-objective optimization problem (4), (5) and (6)
1
11
ˆ
ˆˆ
,, 0
11
ˆ
ˆ
min
sn
Pji
AB X
ij
CCc PXt
,
(7)
2
22
ˆ
0
1
ˆ
ˆ
0min
n
Pj
X
j
C С cPX
,
(8)
where
12
,0
PP
cc
are the penalty function
coefficients. In the current study, these coefficients
were equal to
12
, 1000
PP
cc The current model
determination leads to an optimization problem in
the
nn n n
RRR
field. By determining the problem
in this way, the model can be represented with a
vector from this field. As can be seen, the problem
dimension adds extra complexity to the
identification problem.
In this study, the Cauchy problem (3) is solved
numerically using the Runge-Kutta integration
scheme, which makes the designed approach flexible
and useful for nonlinear or nonstationary systems
with a known symbolic form but unknown
parameters or different input functions.
Now we consider the multi-objective
optimization tool, which has been designed to find a
solution for complex black-box optimization
problems. The proposed algorithm consists of some
stochastic and evolution search operators and meta-
heuristics. The fitness function is performed on the
basis of criteria
1
11
1
ˆˆ
1arg
fit a
Ca C
,
2
22
1
ˆˆ
1arg
fit a
Ca C
,
(9)
where
arg( )
x
I
is a specific transformation of an
alternative
x
to the arguments of a criterion
I
. This
transformation decodes the individual vector
coordinates into matrix coefficients, right-side
vector coefficients and into the initial point in the
case of the
1
ˆ
C criterion. For the
2
ˆ
C criterion, it
converts the solution vector into the initial point.
3 MULTI-OBJECTIVE
COOPERATIVE GENETIC
ALGORITHM WITH THE
ISLAND META-HEURISTIC
While solving multi-objective optimization
problems, we tend to reach a trade-off between
competing criteria. The Pareto-dominance idea
(Goldberg, 1989) underlies the way we may
Multi-objective Dynamical System Parameters and Initial Value Identification Approach in Chemical Disintegration Reaction Modelling
499
compare alternative solutions. As a result, we
expect to obtain a set of non-dominated points which
cannot be preferred to one another based on all the
criteria considered.
Population-based algorithms (in particular,
genetic algorithms) operate with a number of
candidate-solutions at each generation, and
therefore, it was decided to use them as an effective
tool to find Pareto set and front approximations.
However, there are some open questions researchers
usually encounter when they apply multi-objective
genetic algorithms (MOGAs) in real problems.
Whether choosing one of the existing MOGAs or
designing a new one, researches should elaborate
three main concepts which are incorporated into the
scheme of any MOGA and opt for the most
appropriate implementation of each concept for the
problem being solved. Firstly, various fitness
assignment strategies might be proposed (Zitzler,
2004): the dominance rank (the number of points by
which the candidate-solution is dominated), the
dominance depth (a population is divided into
several fronts or niches and it is determined which
front an individual belongs to), or the dominance
count (the number of points dominated by the
candidate-solution) might be used to assign a fitness
function.
Secondly, to keep variety within the Pareto set
and front approximations, diversity preservation
techniques are applied. In (Silverman, 1986) several
variants of these techniques are presented: kernel
methods assess the density with a Kernel function
which takes the distance to another point as an
argument; nearest neighbour techniques are based on
estimating the distance between a given point and its
k-th nearest neighbour; and histograms, using a
hypergrid to calculate neighbourhoods, relate to
another class of density estimators. In most cases,
these approaches calculate the distance between
points in the objective space.
Moreover, to avoid the loss of effective
individuals during the algorithm execution due to
stochastic effects, the idea of elitism has been
suggested. There are two basic ways to implement it.
The first way is to merge the parent population with
the offspring and then to employ environmental
selection taking into account the fitness values of
individuals from the mating pool. Another variant is
based on the usage of an additional set called an
archive for copying promising solutions at each
generation.
Thinking about these issues, in this study we
decided to apply a cooperative MOGA (Brester et
al., 2015) which combines three algorithms based on
different heuristics. The use of the cooperative
MOGA allows us to eliminate the choice of the most
effective algorithm and avoid multiple experiments
with many different MOGAs. The cooperative
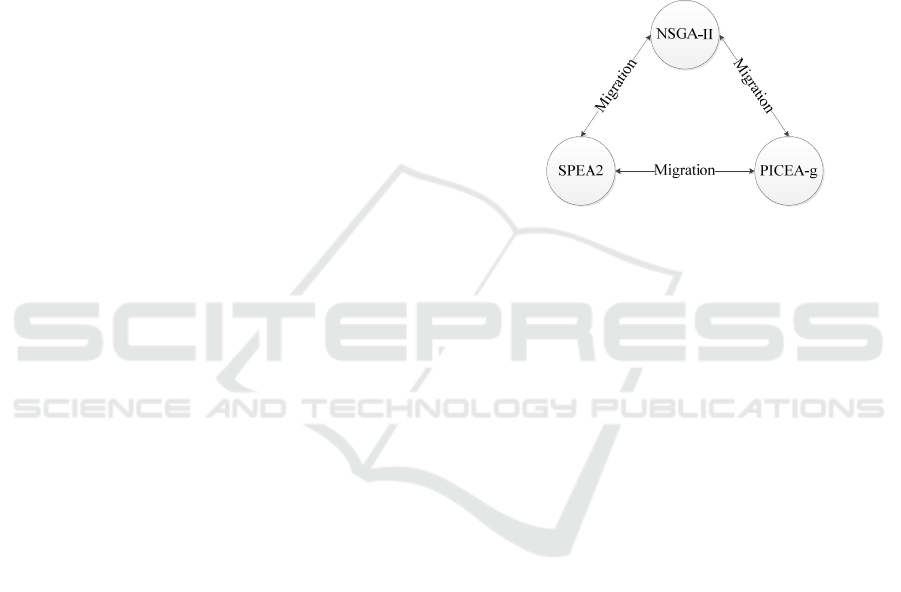
MOGA uses an island model (Whitley et al., 1997)
and includes NSGA-II (Non-Sorting Genetic
Algorithm II) (Deb et al., 2002), PICEA-g
(Preference-Inspired Co-Evolutionary Algorithm
with goal vectors) (Wang, 2013), and SPEA2
(Strength Pareto Evolutionary Algorithm 2) (Zitzler
et al., 2002) as its islands work in a parallel way
(Figure 1).
Figure 1: The Island Model Implemented.
The initial number of individuals M is spread
across L subpopulations: M
i
=M/L, i=1,…,L and the
same number L of threads is initialized. Thus, the
fitness function evaluation for different
subpopulations is implemented in parallel threads.
At each T-th generation algorithms exchange the
best solutions (migration). There are two parameters:
migration size, the number of candidates for
migration, and migration interval, the number of
generations between migrations. Moreover, it is
necessary to define the island model topology, in
other words, the scheme of migration. The fully
connected topology is used, meaning that each
algorithm shares its best solutions with all other
algorithms included in the island model. The multi-
agent model is expected to preserve a higher level of
genetic diversity. The benefits of the particular
algorithm are advantageous in different stages of
optimization.
The cooperative MOGA was investigated on the
set of complex benchmark problems CEC 2009
(Zhang, 2008) and proved its effectiveness. It also
was applied in a wide range of practical problems:
emotion recognition from speech (for feature
selection and neural-network design) (Brester et al.,
2016), the prediction of cardiovascular diseases (for
feature selection) (Brester et al., 2016), and
spacecraft control (for the choice of control contour
variant by solving an optimization problem)
(Semenkina et al., 2016).
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
500
4 HEXADECANE
DISINTEGRATION REACTION
PRODUCT CONCENTRATION
MODELLING
To solve the problem we chose the following
algorithm resources: 3 different populations with
200 individuals and 500 generations, the migration
size was equal to 25, the migration interval was 50.
The number 300000 limited the total amount of the
fitness function evaluations. After 25 algorithm runs
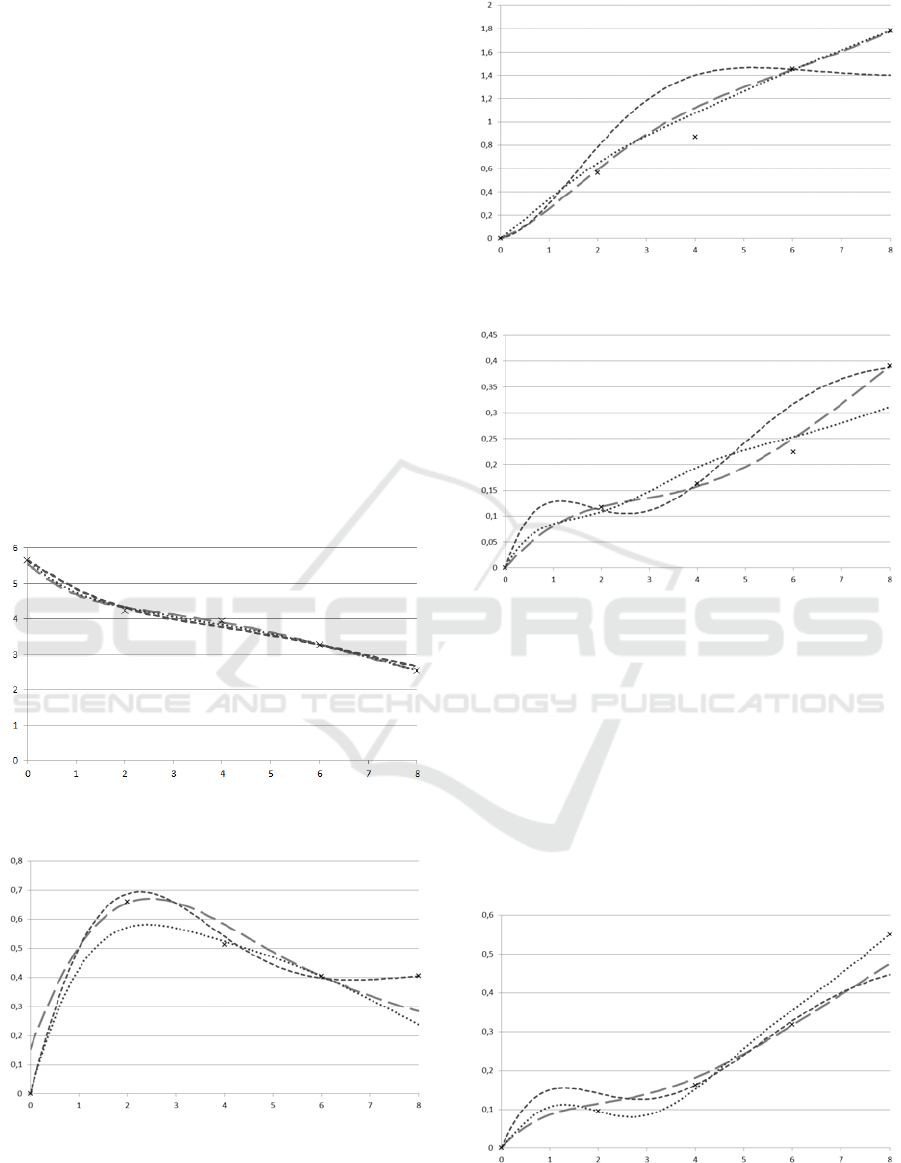
we selected some solutions to be demonstrated.
From the whole Pareto front estimation, we selected
the model with the highest first criterion value
1
ˆ
C
X
,
second criterion value
2
ˆ
C
X
and the one model with
the values in between
*
ˆ
X
. All the models are
presented in the same Figures: the first model is a
long dashed curve, the second is a short dashed
curve and the last one is a dotted curve. The
measurements are marked with grey crosses on the
plot.
Figure 2: Hexadecane concentration: model outputs and
sample measurements.
Figure 3: Spirit concentration: model outputs and sample
measurements.
Figure 4: Concentration of carbonyl compounds: model
outputs and sample measurements.
Figure 5: Lactone concentration: model outputs and
sample measurements.
In Figure 2, Figure 3, Figure 4, Figure 5 and
Figure 6 the hexadecane concentration, spirits,
carbonyl compounds, lactones and acids are
presented, respectively.
If we compare the initial value and the measured
initial value, it can be seen that the model that fits
the data sample better has the highest inaccuracy in
the initial value. At the same time, the model with
the highest value of the second criterion does not fit
the sample data as well as other models.
Figure 6: Acid concentration model outputs and their
measurements.
1
1
ˆ
C
X ,
2
1
ˆ
C
X ,
*
1
ˆ
X ,
1
Y
1
2
ˆ
C
X ,
2
2
ˆ
C
X ,
*
2
ˆ
X ,
2
Y
1
3
ˆ
C
X ,
2
3
ˆ
C
X ,
*
3
ˆ
X ,
3
Y
1
4
ˆ
C
X ,
2
4
ˆ
C
X ,
*
4
ˆ
X ,
4
Y
1
5
ˆ
C
X ,
2
5
ˆ
C
X ,
*
5
ˆ
X ,
5
Y
t
t
t
t
t
Multi-objective Dynamical System Parameters and Initial Value Identification Approach in Chemical Disintegration Reaction Modelling
501
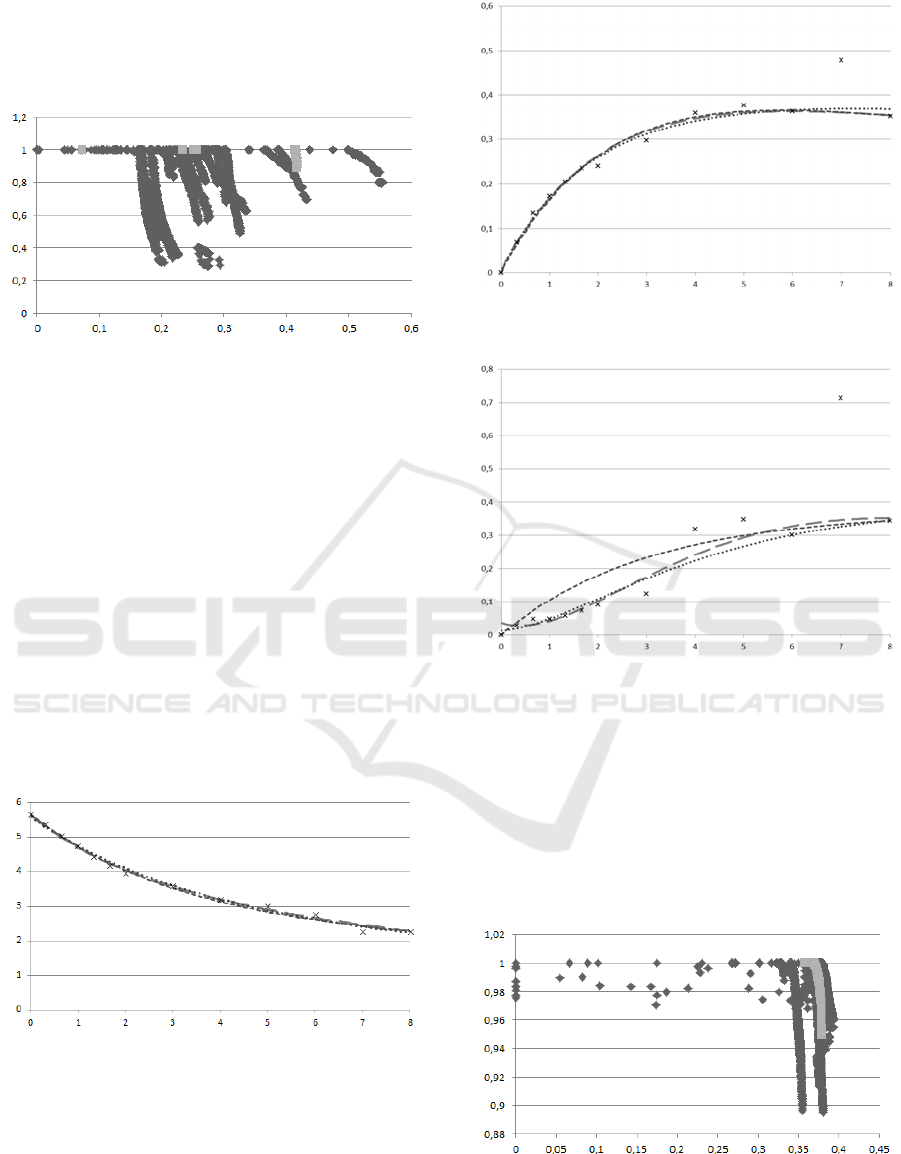
In Figure 7 the Pareto front estimation obtained
by multiple algorithm runs is given. In the same
Figure, the solution found in one algorithm run is
marked with grey points.
Figure 7: Pareto front estimations for each run (black)
and a single run Pareto front estimation (grey).
We see that the Pareto front estimation is a very
difficult problem, which is why there is a very
complicated relation between the closeness to the
initial point estimation and how well it fits the
sample data. This means that there is a necessity to
solve the inverse mathematical problem as an
optimization problem with two criteria.
The same problem was solved for another
chemical experiment with different reaction
characteristics. In this case it was necessary to build
a model for only three outputs: hexadecane
concentration, spirit concentration, and carbonyl
compound concentration. For this problem we also
took three different solutions from the Pareto front
estimation in a similar way to how it was performed
above.
Figure 8: Hexadecane concentration: model outputs and
sample measurements.
Figure 9: Spirit concentration: model outputs and sample
measurements.
Figure 10: Concentration of carbonyl compounds: model
outputs and sample measurements.
As can be seen for the second problem, there is
an abnormal measurement. However, the model
“ignores” this measurement and fits the sample data.
We can conclude that the second problem is easier,
since the models do not differ as much as they did in
the case above. Also, the Pareto front estimation
proves this hypothesis; the estimation is given in
Figure 11.
Figure 11: Pareto front estimations for each run (black)
and a single run Pareto front estimation (grey).
1
ˆ
C
1
1
ˆ
C
X ,
2
1
ˆ
C
X ,
*
1
ˆ
X ,
1
Y
1
2
ˆ
C
X ,
2
2
ˆ
C
X ,
*
2
ˆ
X ,
2
Y
1
3
ˆ
C
X ,
2
3
ˆ
C
X ,
*
3
ˆ
X ,
3
Y
2
ˆ
C
2
ˆ
C
1
ˆ
C
t
t
t
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
502

The last Figure gives us the same information as
Figure 7 but for the current problem. It is easier to
estimate the Pareto front since many points are
localized near the same curve.
4 CONCLUSION
The experimental results of this study prove that the
proposed approach is useful in solving inverse
mathematical problems for dynamical systems in
cases when the initial point and the noisy sample
data are unknown. Using this approach, many
models of hexadecane disintegration reaction
product concentrations were build. It was
demonstrated that these models fit the observation
data well and behave normally.
In this paper, the multi-output dynamical system
identification problem was solved by means of the
multi-objective heterogeneous genetic algorithm
with the island meta-heuristic. The results prove the
high efficiency of the algorithm used and the
applicability of the proposed approach, which allows
us to solve the inverse mathematical modelling
problem in the case of having no information about
the initial point value and satisfy the trajectory
constraints.
It can be seen that the model output fits the
sample data well and represents the physical
properties of the process. The multi-objective
problem reduction allows us to receive the Pareto
front estimation on the basis of estimations of the
initial point and system parameters, so the expert can
vary the degree of belief in the initial point values
and choose the mathematical model that would
satisfy his modelling needs. Moreover, the proposed
two-criterion approach allows mathematical models
to be found, the parameters and initial value
characteristics of which can contradict. As can be
seen in Figures 7 and 11, different problems have
different Pareto fronts, but the criteria have a
complex relation and so they cannot be represented
as a single one.
The considered sample data has a small size,
which makes it impossible to apply statistical
methods for the initial value estimation or apply
some other identification techniques based on
approximating the model output as a static function.
This is the reason why the differential equation
based models are the most important part of
modelling the dynamical processes and so it is
important to develop the algorithms for the equation
parameter identification.
Further work is related to the inverse
mathematical problem solving for multi-output
dynamical systems of higher order and control
inputs. Another direction is the developing of
heuristic optimization tools for the single and multi-
criteria problems of dynamical system identification,
and designing problem-oriented modifications.
ACKNOWLEDGEMENTS
This research is supported by the Russian
Foundation for Basic Research within project No 16-
01-00767.
REFERENCES
Brester, C., Kauhanen, J., Tuomainen, T.P., Semenkin, E.,
Kolehmainen, M., 2016. Comparison of two-criterion
evolutionary filtering techniques in cardiovascular
predictive modelling. Proceedings of the 13th
International Conference on Informatics in Control,
Automation and Robotics (ICINCO’2016), Lisbon,
Portugal, vol. 1: pp. 140–145.
Brester, C., Semenkin, E., 2015. Cooperative
Multiobjective Genetic Algorithm with Parallel
Implementation. Advances in Swarm and
Computational Intelligence, LNCS 9140: pp. 471–
478.
Brester, C., Semenkin, E., Sidorov, M., 2016. Multi-
objective heuristic feature selection for speech-based
multilingual emotion recognition. Journal of Artificial
Intelligence and Soft Computing Research, vol. 6, no.
4: pp. 243-253.
Deb, K., Pratap, A., Agarwal, S., Meyarivan, T., 2002. A
fast and elitist multiobjective genetic algorithm:
NSGA-II. IEEE Transactions on Evolutionary
Computation 6 (2): pp. 182-197.
Goldberg, D., 1989. Genetic algorithms in search,
optimization, and machine learning. Addison-wesley.
Ryzhikov, I., Semenkin, E., 2017. Restart Operator Meta-
heuristics for a Problem-Oriented Evolutionary
Strategies Algorithm in Inverse Mathematical MISO
Modelling Problem Solving. IOP Conference Series:
Materials Science and Engineering, vol. 173.
Ryzhikov, I., Semenkin, E., Panfilov, I., 2016.
Evolutionary Optimization Algorithms for Differential
Equation Parameters, Initial Value and Order
Identification. ICINCO (1) 2016: pp. 168-176.
Semenkina, M., Akhmedova, Sh., Brester, C., Semenkin,
E., 2016. Choice of spacecraft control contour variant
with self-configuring stochastic algorithms of multi-
criteria optimization. Proceedings of the 13th
International Conference on Informatics in Control,
Automation and Robotics (ICINCO’2016), Lisbon,
Portugal, vol. 1: pp. 281–286.
Multi-objective Dynamical System Parameters and Initial Value Identification Approach in Chemical Disintegration Reaction Modelling
503

Silverman, B., 1986. Density estimation for statistics and
data analysis. Chapman and Hall, London.
Wang, R., 2013. Preference-Inspired Co-evolutionary
Algorithms. A thesis submitted in partial fulfillment
for the degree of the Doctor of Philosophy, University
of Sheffield: p. 231.
Whitley, D., Rana, S., and Heckendorn, R., 1997. Island
model genetic algorithms and linearly separable
problems. Proceedings of AISB Workshop on
Evolutionary Computation, vol.1305 of LNCS: pp.
109-125.
Zhang, Q., Zhou, A., Zhao, S., Suganthan, P. N., Liu, W.,
Tiwari, S., 2008. Multi-objective optimization test
instances for the CEC 2009 special session and
competition. University of Essex and Nanyang
Technological University, Tech. Rep. CES–487, 2008.
Zitzler, E., Laumanns, M., Bleuler, S., 2004. A Tutorial on
Evolutionary Multiobjective Optimization. In:
Gandibleux X., (eds.): Metaheuristics for
Multiobjective Optimisation. Lecture Notes in
Economics and Mathematical Systems, Vol. 535,
Springer.
Zitzler, E., Laumanns, M., Thiele, L., 2002. SPEA2:
Improving the Strength Pareto Evolutionary Algorithm
for Multiobjective Optimization. Evolutionary
Methods for Design Optimisation and Control with
Application to Industrial Problems EUROGEN 2001
3242 (103): pp. 95-100.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
504
