
A Solution for Ice Accretion Detection on Wind Turbine Blades
Jocelyn Sabatier
1
, Patrick Lanusse
2
, Benjamim Feytout
3
and Serge Gracia
3
1
Bordeaux University, IMS Lab., UMR 5218 CNRS, 351 Cours de la Libération, 33405 Talence, France
2
Bordeaux INP, IMS Lab., UMR 5218 CNRS, 351 Cours de la Libération, 33405 Talence, France
3
VALEOL, Parc de l’Intelligence Environnementale, 213 Cours Victor Hugo, 33323 Bègles Cedex, France
Keywords: Wind Turbine, Blade Ice Detection, Observer, Anti-icing Device.
Abstract: This paper proposes a solution for ice accretion detection on wind turbine blades. The solution involves an
active deicing device that uses a conductive polymer paint to heat relevant surfaces of the blade under
electric potential difference. This deicing system is used here to perform a dynamic thermal characterization
of the blade for various operating conditions (with or without ice, with or without wind). The dynamical
behavior differences highlighted are then exploited using a dynamic observer to detect ice accretion through
the control signal produced by the observer. Tests carried out in a climatic chamber showed the validity and
the accuracy of the proposed method.
1 INTRODUCTION
Cold areas are often attractive regions for wind
turbine installation for two main reasons:
- they are well exposed to wind,
- the low temperatures increase air density, thus
increasing the kinetic energy of the wind and
consequently, the power captured by the wind
turbine.
However, their wind turbine blades are subjected
to icing which can lead to serious consequences for
the production, maintenance and durability of the
whole turbine (Jasinski et al., 1998) (Hochart et al.,
2008).
Ice accretion can be caused by freezing rain,
drizzle, freezing fog, or frost when the wind turbine
is installed near water bodies. It usually appears on
the intrados (to a lesser degree) and extrados, and /
or on the leading and trailing edges (Kraj and
Bibeau, 2010).
Icing reduces the aerodynamic efficiency of the
blades as it changes the blade geometrical profile.
This leads to production losses (Jasinski et al.,
1998), (Ronsten, 2004).
Ice accretion also creates additional and
unbalanced loads that cause increased material
fatigue, leading to premature wear or damage to
major elements of the kinematic chain (impact on
the multiplier and the generator) (Ganander and
Ronsten, 2003) (Frohboese and Anders, 2007) (Virk
et al., 2010). The mass of accumulated ice can
significantly increase vibrations and also the radial
loads on the blades due to centrifugal force. The
system fastening the blades to the hub must be
specifically sized to support the extra stress and
avoid mechanical failure. Such a situation may
require stopping the turbine during severe frost
events.
From a safety point of view, chunks of ice can be
detached during the turbine shutdown or can be
projected during operation, causing lethal risks to
maintenance operators or any other person in the
vicinity of the wind turbine (Seifert, 2003).
Many solutions have been proposed in the
literature to fight against turbine blade ice accretion
(Parent and Ilinca, 2011), such as passive
technologies, which aim to prevent the formation of
ice on the blades (Kimura et al., 2003), (Dalili et al.,
2009), or active technologies which operate when
ice is detected. Most of these technologies come
from the field of aviation and are based on
mechanical deformation or the use of a heater for the
leading edge (Botura and Fisher 2003) (Laakso and
Peltola, 2005).
Active technologies require a means to detect ice
accretion. According to (Homola et al., 2006) and
(Parent and Ilinca, 2011), icing can be detected
either directly or indirectly. Direct methods detect a
change in a physical property caused by ice
414
Sabatier, J., Lanusse, P., Feytout, B. and Gracia, S.
A Solution for Ice Accretion Detection on Wind Turbine Blades.
DOI: 10.5220/0006403904140421
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 414-421
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
accretion such as (and not cited in (Homola et al.,
2006) (Parent and Ilinca, 2011)) mass (Skrimpas et
al., 2016), reflective properties (Berbyuk et al.,
2014), electrical or thermal conductivity, dielectric
coefficient and inductance (Owusu et al., 2013).
Indirect methods are based upon detecting the
weather conditions that lead to icing (humidity and
temperature).
In this paper, a direct method is proposed. It
involves a de-icing device built by the authors and
recently published (Sabatier et al., 2016). This de-
icing device uses a conductive polymer paint to heat
relevant surfaces of the blade under potential
difference. It is used here to perform a dynamical
thermal characterization of the blade for various
operating conditions (with or without ice, with or
without wind). The dynamical behavior differences
highlighted are then exploited using a dynamic
observer to detect ice accretion through the control
signal produced by the observer.
2 PROTOTYPE AND DEICING
DEVICE PRESENTATION
The proposed ice accretion detection method
involves an active de-icing device recently published
(Sabatier et al., 2016). This de-icing device is based
on heating relevant surfaces of the blade with
conductive polymer paint under electric potential
difference (Rescoll, 2011). Current flow through the
paint film causes heating by the Joule effect that is
proportional, among other things, to the film surface
and thickness. The paint strip power supply is
ensured by electrodes connected to the wind turbine
auxiliaries from the hub.
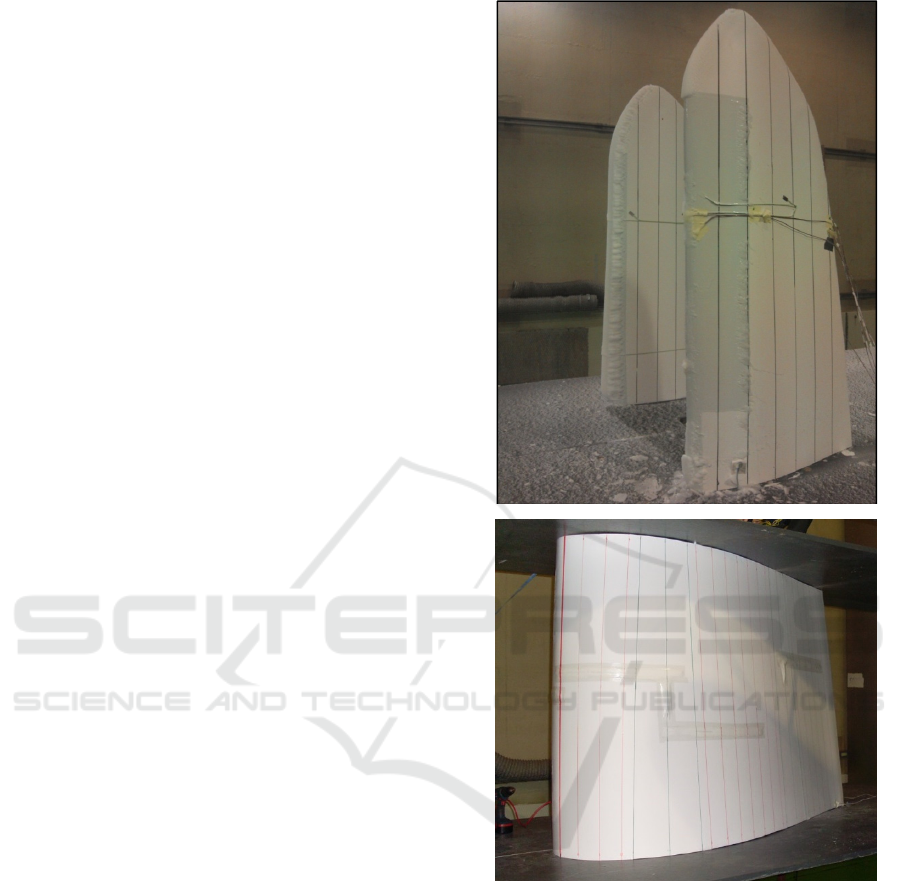
For dynamical modeling and to evaluate the ice
accretion detection method, prototypes of the blade
root and the blade tip were constructed (figure 1).
They integrate different layers of paint (grey parts)
and thermocouples. They were used in a climatic
wind tunnel at the “Centre Scientifique et Technique
du Bâtiment (CSTB)” in Nantes (France) to learn
more about how frost develops on a blade and
especially on what parts of the blade. These
prototypes were also used to obtain a dynamical
model linking the voltage applied on the blade to the
temperature at various points of the paint strips and
also to validate the temperature control system.
Figure 1: Blade tip and blade root prototypes used in the
atmospheric wind tunnel.
3 THERMAL MODELING
3.1 Thermal Model with or without Ice
To obtain a thermal model of the blade heating
system, the simplified representation of figure 2 was
used. It comprises a blade (fiberglass and epoxy
resin) having a large size (in the longitudinal
direction, not shown here) fitted with two electrodes
and then partially covered with paint. A sensor
measures the temperature at the center of the paint
A Solution for Ice Accretion Detection on Wind Turbine Blades
415
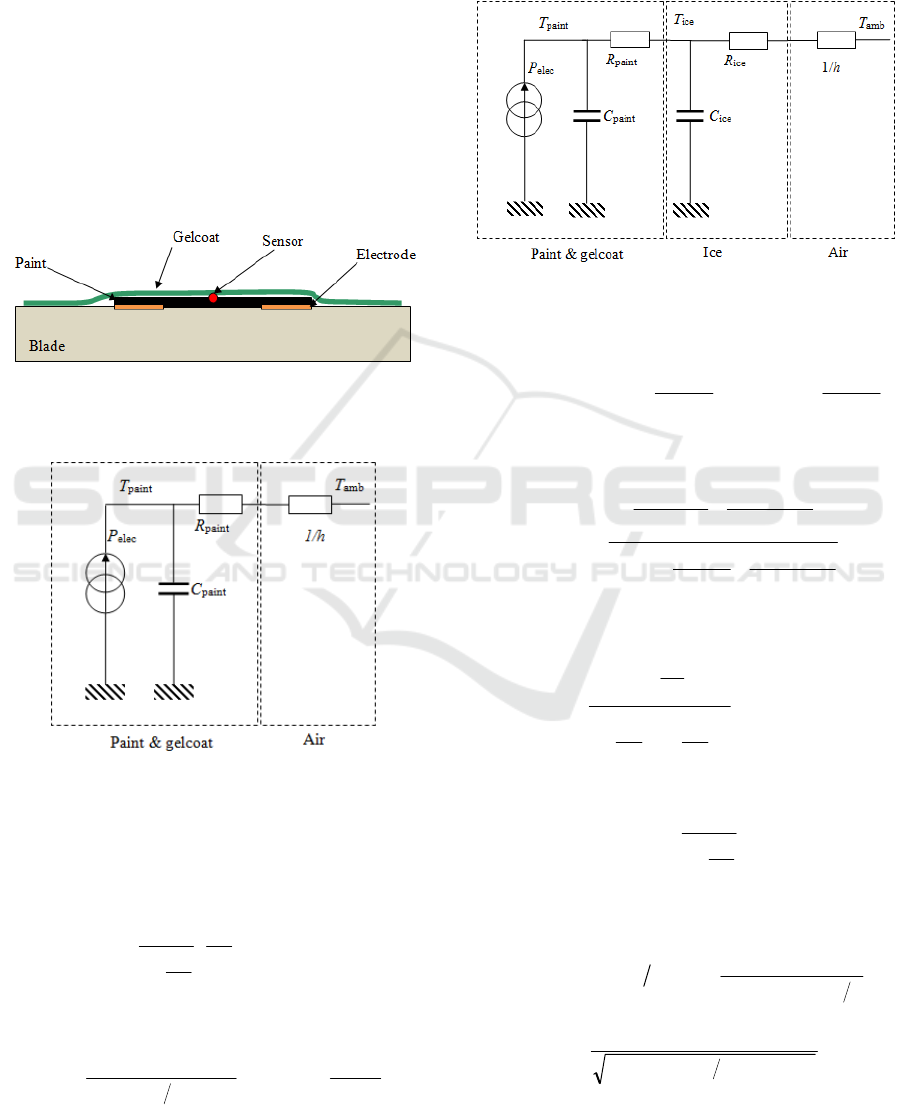
strip. The assembly is protected and separated from
ambient air by a layer of gelcoat.
As shown in (Sabatier et al., 2016), the thermal
resistance and capacity of the blade (epoxy resin)
can be neglected due to the high thermal resistance
value of the blade. Without ice, the resulting
thermal model is thus represented by figure 3, where
T
paint
and T
amb
are respectively the paint & gelcoat
temperature and the ambient air temperature. R
paint
and C
paint
are respectively the thermal resistance and
capacity of the paint & gelcoat. P
elec
is the thermal
power produced by the paint and h is the paint-air
convection coefficient. In view of the low respective
thicknesses of the paint and the gelcoat, they were
considered as the same material.
Figure 2: Simplified representation (transverse section) of
the blade, the conductive paint, the electrode and the
gelcoat protection.
Figure 3: Simplified thermal model without ice.
From figure 3 and in the Laplace domain, the
following equation linking the temperature of the
paint to the electrical power and the ambient
temperature can be obtained:
() () ()
+
+
= sTsP
K
s
sT
amb
elec
c
c
paint
ω
ω
1
1
(1)
with:
()
paintpaint
c
ChR 1
1
+
=
ω
and
paint
C
K
1
=
. (2)
With ice, an RC cell representing the ice layer
must be added between the paint & gelcoat and
ambient air, as shown by figure 4, where R
ice
and
C
ice
are respectively the thermal resistances and
capacities of the ice.
Figure 4: Thermal model with ice.
From the model in figure 4, it can be shown that:
()
()
intint
int
1
)(
pa
ice
elec
pa
papaint
R
sT
sP
R
sCsT +=
+
and (2)
()
()
hRR
sC
hR
sT
R
sT
sT
icepa
ice
ice
amb
pa
pa
ice
/1
11
/1
)(
int
int
int
+
++
+
+
=
or after simplification
() ()
+
+
++
+
=
sT
s
K
sP
s
s
z
s
KsT
ambelec
paint
3
2
2
22
1
1
1
2
1
1
)(
ω
ωω
ω
(3)
with
hRRK
icepaint
1
1
++=
,
hRR
CR
icepaint
icepaint
1
2
1
++
=
ω
(4)
()
icepainticepaint
CChRR 1
1
2
+
=
ω
, (5)
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
416
()
()
icepaintpaint
icepaint
ice
paint
icepainticepaint
CCR
CC
hR
R
CChRRz
+
+
+
+=
1
1
1
2
1
, (6)
hRR
K
icepaint
1
1
2
++
=
, (7)
()
hRR
ChRR
icepaint
iceicepaint
1
1
3
++
+
=
ω
. (8)
The thermal power applied by the paint, denoted
P
elec
, is produced by an electronic dimmer controlled
by a voltage u(t) such that:
()
()
r
elec
G
sP
su =
, (9)
in which the gain G
r
that characterizes the dimmer is
defined by
10
max
P
G
r
=
. (10)
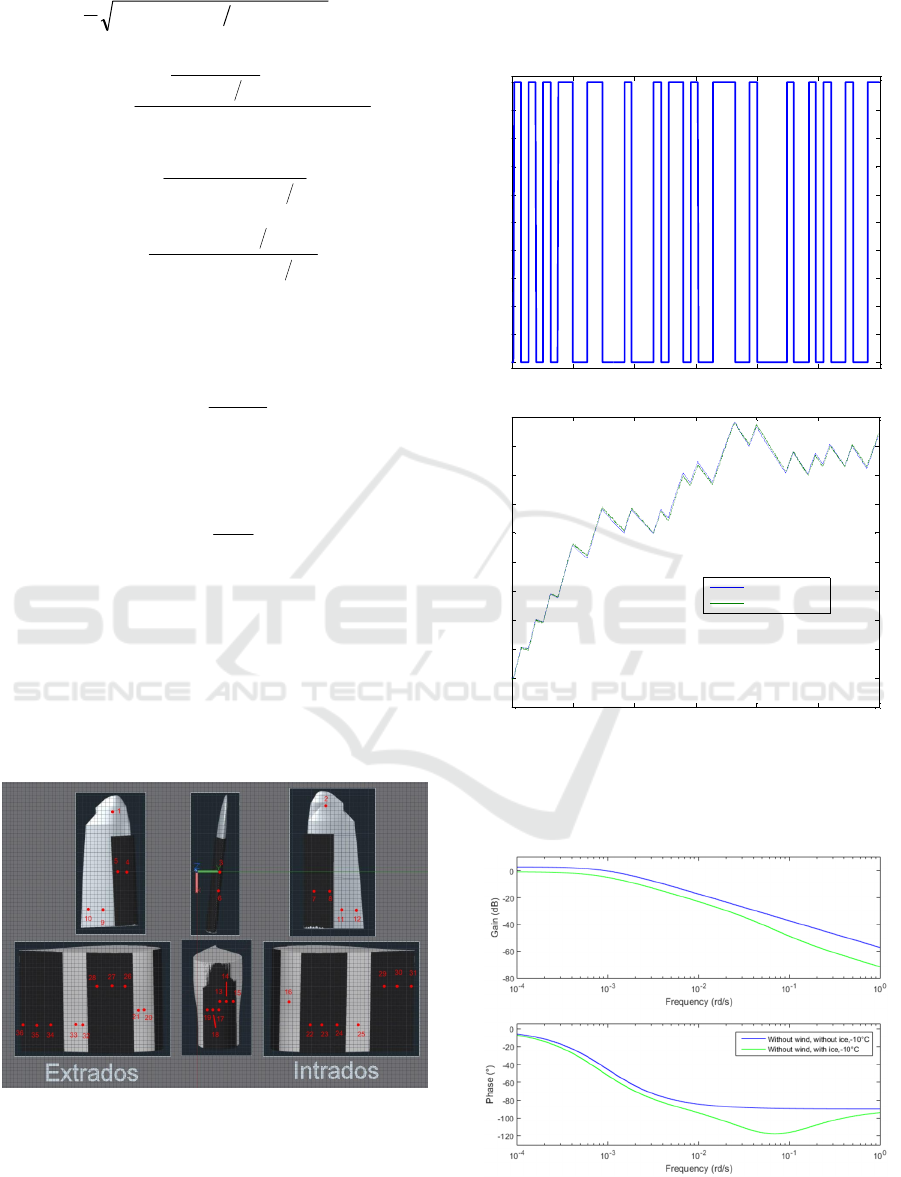
3.2 Parameter Identification
Numerical values of the parameters in relations (1)
and (3) were determined using measures recorded at
31 locations on the prototype as shown on figure 5.
To obtain the measures, a pseudo random binary
sequence (PRBS) shown in figure 6 (top) was used
for the control input u(t).
Figure 5: Locations of temperature sensors (red dots) and
heating paint strips (black) on the prototype.
This dynamic characterization was repeated for
all the thermocouples on the heating strips and for
different wind and ice conditions. As an example,
the frequency responses of the models obtained for
sensor #6 are shown in figures 7 and 8. Similar
results were obtained for the other sensors.
Figure 6: PRBS used for identification and a comparison
of the model response with the measured temperature from
sensor #6 (readjusted at °0C) with ice (T
amb
= – 10°C) and
without wind.
Figure 7: Comparison of the frequency response of the
models obtained for sensor #6, without wind (T
amb
= -
10°C) and with or without ice.
0 500 1000 1500 2000 2500 3000
0
1
2
3
4
5
6
7
8
9
10
Time (s )
Control input (V)
0 500 1000 1500 2000 2500 3000
-1
0
1
2
3
4
5
6
7
8
9
Tim e (s )
Temperature
Model response
Measures
A Solution for Ice Accretion Detection on Wind Turbine Blades
417
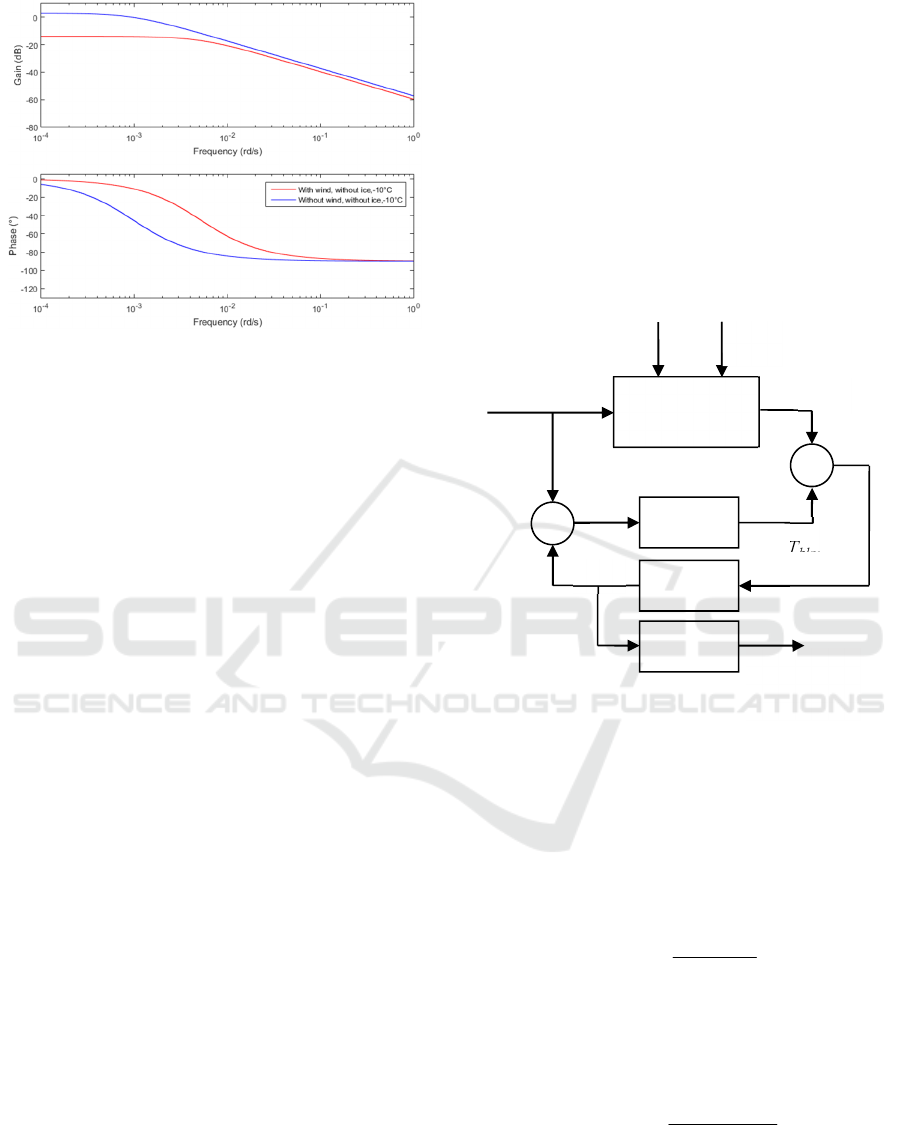
Figure 8: Comparison of the frequency response of the
models obtained for sensor #6, without ice (T
amb
= - 10°C)
and with or without wind (25 m/s speed).
Comparisons of the model frequency responses
reveal that:
- ice on the blade reduces the static gain and the
corner frequency of the frequency responses;
- wind increases the corner frequency of the
frequency responses and in accordance with relation
(1) reduces the static gain through the variation in
the convection exchange coefficient h.
It can be concluded from this comparison that:
- the dynamic behavior variations induced by ice
can be exploited to detect ice accretion,
- wind also creates dynamic behavior variations
that are linked to the convection exchange
coefficient h.
4 ICE DETECTION SOLUTION
The differences in the dynamic behaviors observed
with or without ice and highlighted in the previous
section were next exploited with an observer to
detect ice accretion. The feedback configuration of
the observer means that the control signal, which is
used to deduce ice accretion, can be immunized
against noise and disturbances, while revealing the
significant dynamical behavior differences due to ice
accretion.
4.1 Observer-based Ice Accretion
Detection
The observer-based detection proposed is described
in figure 9. To detect ice, a control input u(t) is
applied to the dimmer that controls the heating of the
paint strips. The resulting signal T
blade
measured by a
temperature sensor is recorded. The same signal u(t)
is applied to the model obtained for the same sensor
without wind and without ice. The estimated
temperature
blade
T
ˆ
thus obtained is compared to
T
blade
to produce an error
ε
T
. The error is the input of
a controller that modifies the input u(t) to force the
output of the model to cancel the error
ε
T
. The
higher the output v(t) of the controller, the greater
the difference between the model and the blade ice
accretion state. Signal v(t) after filtering by filter
F(s) can thus be used to decide whether icing occurs
or not.
Figure 9: Observer-based ice accretion detection.
4.2 Validation in a Climatic Chamber:
without Wind
Let G
6
(s) be the transfer function linking the control
voltage u(t) to the temperature measured by sensor
#6 with
()
s
sG
+
=
0067.0
013.0
6
. (11)
The numerical values of parameters in relation
(11) are computed to fit time responses in figure 6
through an optimization program. The Z-transform
of G
4
(s) with a sampling period of 1s is thus
()
1
1
6
9933.01
01296.0
−
−
−
=
z
zG . (12)
A controller C(z
-1
) was designed to impose a gain
crossover frequency at least 10 times greater than
the corner frequency of G
6
(z
-1
) on the feedback
Blade with
heating system
and sensors
G(z)
u(
t
)
+
+
-
C(z)
+
F
(z)
Ice accretion
information
T
blade
T
blade
∧
ε
T
v(t)
Wind
speed
T
amb
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
418
connection of G
6
(z
-1
) and C(z
-1
). This controller is
given by:
()
21
21
1
3318.03318.11
1574.51045.02619.5
−−
−−
−
+−
−+
=
zz
zz
zC
. (13)
The following low pass filter
()
1
1
1
99.01
00995.0
−
−
−
−
=
z
z
zF
. (14)
was then tuned (after a Fourier transform analysis)
to attenuate the control input noise. For each test
presented in the sequel, temperature was initially
regulated at -1°C (initial condition) using the system
designed in (Sabatier et al., 2016). A 10V control is
sent to the dimmer to use maximum power to engage
the melting ice very quickly. The time responses
from the sensor (process), the output of the model
(estimated temperature) and at the output of the
controller v(t) in the cases without or with ice are
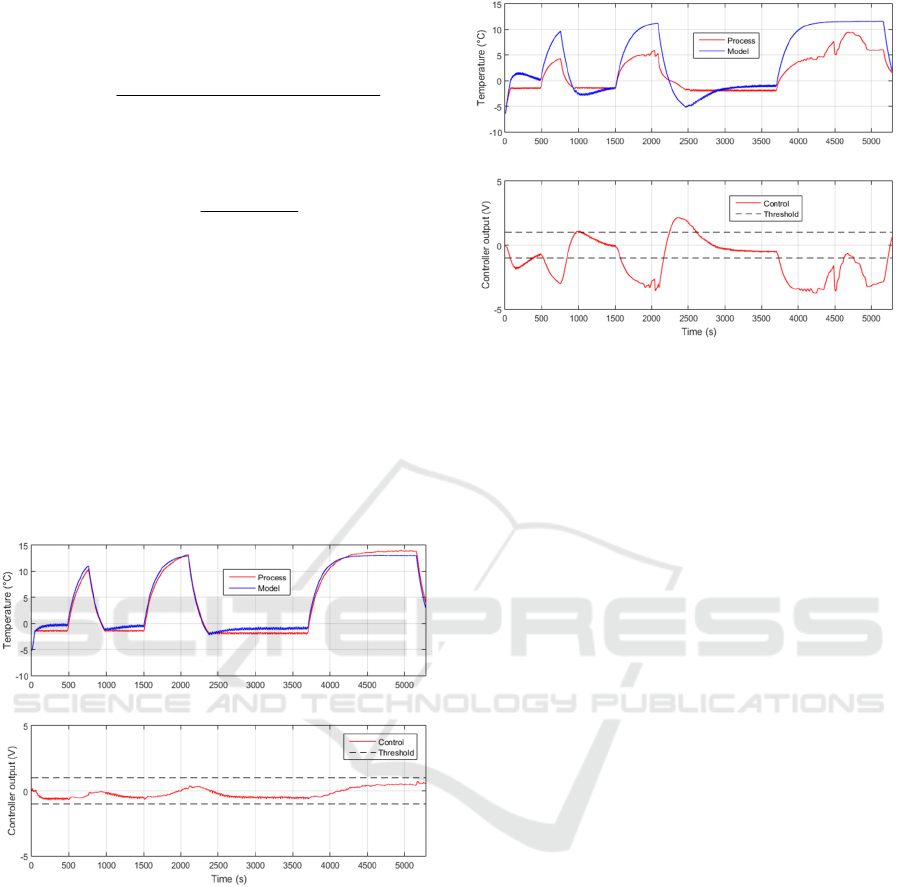
represented respectively in figure 10 and figure 11.
Figure 10: Case without ice: comparison of the
temperature measure from sensor #6 (process) and from
the corresponding model (top) and control signal v(t)
(bottom)
On the ice-free test of figure 10, the blue curve
represents the temperature provided by the identified
model that links the dimmer control voltage to the
temperature measured by sensor #6. This response is
very close to the real temperature that is shown in
red: the error is less than 10% (less than 2 ° C error
for a delta T of 15 ° C). As a result, the control
signal v(t) at the output of the controller remains
below a threshold fixed at 1V.
Figure 11: Case with ice: comparison of the temperature
measure from sensor #6 (process) and from the
corresponding model (top) and control signal v(t)
(bottom).
For the test with ice shown in figure 11, a large
part of the power produced by the paint is absorbed
by the state change in the ice/water and does not
cause an increase in temperature. This leads to a
small static gain for the system linking the dimmer
control voltage and the temperature (thus a
mismatch of the model to the system). Therefore a
negative correction is produced to force the model to
behave like the process. The control signal v(t) at the
output of the controller now exceeds the threshold.
The temperature peaks that occur at times
[≈2000s] and [4500-5000s] correspond to
movements of water and air bubbles in the space
between the ice and the plate. This phenomenon
confirms that the ice is melting. In conclusion, the
detection system of figure 9 produces a control
signal whose level becomes large enough to make it
possible to detect the presence of ice.
4.3 Validation in a Climatic Chamber:
with Wind
With wind, thermal convection needs to be modeled
precisely. The convection coefficient of h (in W. °C
-
1
) which appears in figure 4 has to be computed to
parameterize the model in figure 9 as a function of
the wind, and in particular the corner frequency
ω
c
defined by relation (2). To define the dependence of
ω
c
on the wind speed (to correctly detect the ice-free
case), a series of characterization tests with a PRBS
dimmer control voltage was carried out for winds up
to 18 m/s. For each test, a model was identified
leading to an estimation of parameter τ = 1/
ω
c
.
A Solution for Ice Accretion Detection on Wind Turbine Blades
419
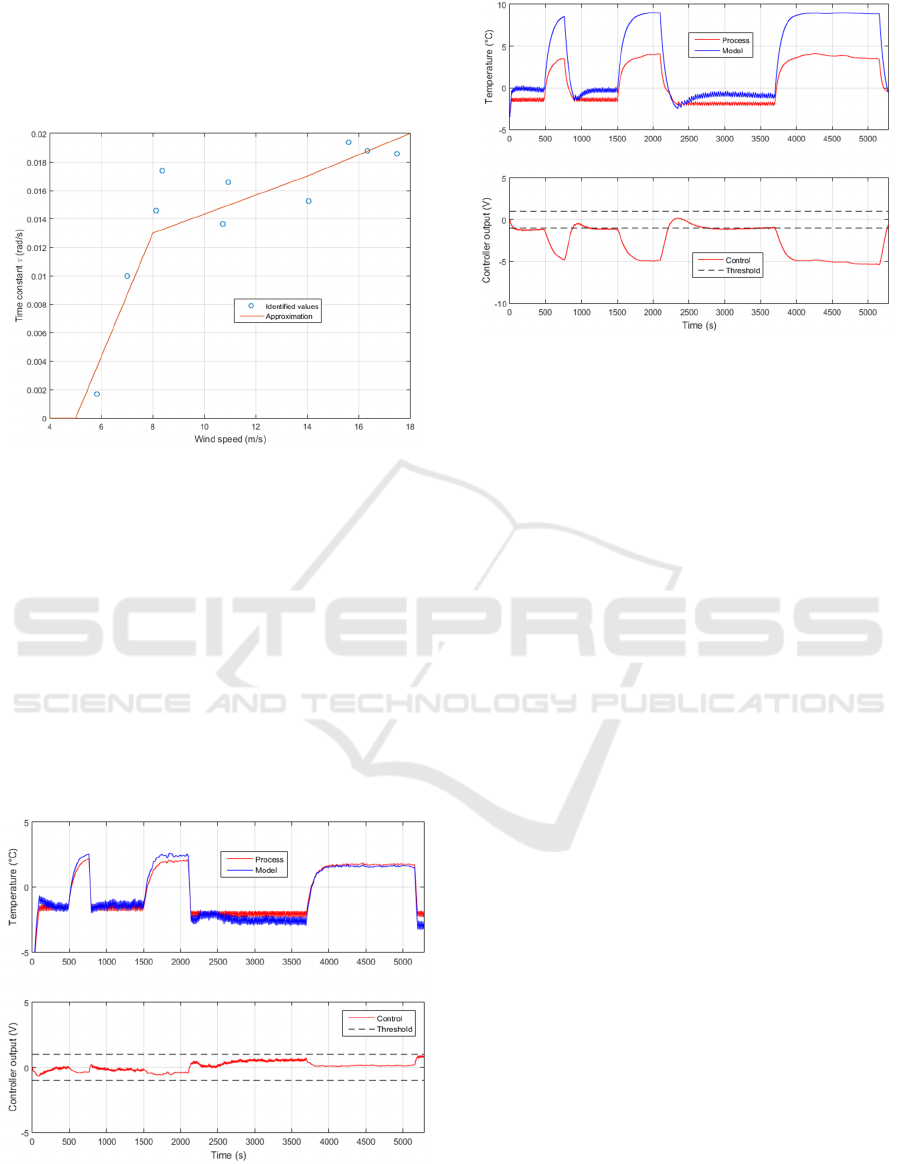
Variations of the time constant
τ
with respect to
wind speed are shown on figure 12 that highlights
the model dependence on the wind speed. This
figure also shows the approximation used in the
model.
Figure 12: Impact of the wind speed on the parameter
τ
= 1/ω
c
and approximation used in the model.
Given the previous analysis, the corner
frequency of the model G in figure 9 can be adjusted
to take wind conditions (or blade rotation speed) into
account. The results obtained with this strategy are
shown on figure 13 and 14. In figure 13, in spite of
wind conditions and without ice, the control signal
v(t) remains small (less than the 1V threshold) thus
leading to the conclusion of no ice accretion.
Conversely, with ice accretion, figure 14 shows that
the control signal v(t) required to force the model to
behave like the real process is larger than the 1V
threshold. Thus ice accretion can be deduced.
Figure 13: Case without ice and with wind (10 m/s):
comparison of the temperature measure from sensor #6
(process) and from the corresponding model (top) and
control signal v(t).
Figure 14: Case with ice and with wind (10 m/s):
comparison of the temperature measure from sensor #6
(process) and from the corresponding model (top) and
control signal v(t).
These results validate the efficiency of the
proposed method, and especially the relevance of
using an observer to detect the presence of ice. With
ice, the control signal becomes large enough to make
a decision.
5 CONCLUSIONS
Using a de-icing device recently proposed by
(Sabatier et al., 2016) that involves a conductive
polymer paint to heat relevant surfaces of the blade
under electrical potential difference, an ice accretion
detector is proposed. The differences in the
dynamical thermal behavior of the paint with or
without ice accretion are exploited with an observer
to determine whether icing occurs or not. The
proposed strategy was evaluated on a blade
prototype in a climatic chamber. These tests showed
the efficiency of the method both with and without
wind.
REFERENCES
Berbyuk V., Peterson B.; Möller, J., 2014, Towards early
ice detection on wind turbine blades using acoustic
waves, SPIE Proceedings, Vol. 9063.
Botura G., Fisher K., 2003, Development of Ice Protection
System for Wind Turbine Applications, BOREAS VI,
FMI, Pyhätunturi, Finland, p. 16
Dalili N., Edrisy A., Carriveau R., 2009, A review of
surface engineering issues critical to wind turbine
performance, Renewable and Sustainable Energy
Reviews, Vol. 13, pp. 428–438.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
420

Frohboese P., Anders A., 2007, Effects of Icing on Wind
Turbine Fatigue Loads, Journal of Physics:
Conference Series, Vol. 75.
Ganander, H., Ronsten, G., 2003, Design load aspects due
to ice loading on wind turbine blades. In Proceedings
of the 2003 BOREAS VI Conference. Pyhätunturi,
Finland. Finnish Meteorological Institute.
Hochart, C., Perron J., Fortin G., Ilinca A., 2008, Wind
turbine performance under icing conditions, Wind
Energy, Vol. 11, N° 4, pp 319–333.
Homola M. C., Nicklasson P. J., Sundsbø P. A., 2006, Ice
sensors for wind turbines, Cold Regions Science and
Technology Vol. 46, pp 125–131
Jasinski, W.J., Noe, S.C., Selig, M.S., Bragg, M.B, 1998,
Wind turbine performance under icing conditions.
Transactions of the ASME, Journal of solar energy
engineering, Vol. 120, pp 60–65.
Kimura, S., Sato T., Kosugi K., 2003, The Effect of Anti-
Icing Paint on the Adhesion Force of Ice Accretion on
a Wind Turbine Blade, BOREAS VI, FMI,
Pyhätunturi, Finland, p. 9
Kraj, A. G., Bibeau E. L., 2010, Phases of icing on wind
turbine blades characterized by ice accumulation,
Renewable Energy, Vol. 35, N° 5, pp 966–972
Laakso, T., Peltola E., 2005, Review on blade heating
technology and future prospects, BOREAS VII, FMI,
Saariselkä, Finland, p. 12
Owusu K. P., Kuhn D. C. S., Bibeau E. L., 2013,
Capacitive probe for ice detection and accretion rate
measurement: Proof of concept, Renewable Energy,
Vol. 50, pp 196–205
Parent O., Ilinca A., 2011, Anti-icing and de-icing
techniques for wind turbines: Critical review, Cold
Regions Science and Technology, Vol. 65, N° 1, pp
88–96
Rescoll, 2011, Rescoll Society, web site of the technology
owner, http://www.rescoll.fr/nos_technologies_pani
plast.php.
Ronsten, G., 2004, Svenska erfarenheter av vindkraft i
kallt klimat - nedisning, iskastoch avisning. Elforsk
report 04:13.
Sabatier J., Lanusse P., Feytout B., Gracia S., 2016,
CRONE control based anti-icing / deicing system for
wind turbine blades, Control Engineering Practice,
Vol. 56, pp 200–209
Seifert H., 2003, Technical requirements for rotor blades
operating in cold climate. In Proceedings of the 2003
BOREAS VI Conference. Pyhätunturi, Finland.
Finnish Meteorological Institute.
Skrimpas G. A., Kleani K., Mijatovic N., Sweeney C. W.
Jensen B. B., Holboell J., 2016, Detection of icing on
wind turbine blades by means of vibration and power
curve analysis, Wind Energy, Vol. 19, 1819–1832.
Virk M., Homola M., Nicklasson P., 2010, Effect of Rime
Ice Accretion on Aerodynamic Characteristics of
Wind Turbine Blade Profiles, Wind Engineering, Vol.
34, N° 2, pp 207-218.
A Solution for Ice Accretion Detection on Wind Turbine Blades
421
