
Using Constraint Cellular Automata to Simulate Urban Development
in a Cross-border Area
J.-P. Antoni
1
, V. Judge
1,2
, G. Vuidel
1
and O. Klein
2
1
LaboratoireTheMA, UMR 6049 CNRS and University of Burgundy Franche-Comté, 4 boulevard Gabriel, F-21000 Dijon,
32 rue Mégevand, F-25000 Besançon, France
2
LISER - Luxembourg Institute of Socio-Economic Research, 11 porte des Sciences, L-4366 Esch-sur-Alzette, Luxembourg
Keywords: Cellular Automata, Markov Chains, Cross-border Area, Land Use Scenarios, Prospective.
Abstract: Urban sprawl and space consumption have become key issues in sustainable territorial development.
Traditional planning approaches are often insufficient to anticipate their complex spatial consequences,
especially in cross-border areas. Such complexity requires the use of dynamic spatial simulations and the
development of adapted tools like LucSim, a CA-based tool offering solutions for sharing spatial data and
simulations among scientists, technicians and stakeholders. Methodologically, this tool allows us to simulate
future land use change by first quantifying and then locating the changes. Quantification is based on Markov
chains and location on transition rules. The proposed approach is implemented on the Strasbourg-Kehl
cross-border area and calibrated with three contrasting prospective scenarios to try to predict cross-border
territorial development.
1 CONTEXT AND RESEARCH
OBJECTIVES
In the current context of increasing urbanization and
daily mobility, urban sprawl and space consumption
have become crucial issues for achieving sustainable
territorial development (European Environment
Agency 2006). This problem is further complicated
in the case of cross-border areas where operational
procedures on each side of the frontier differ from an
administrative, legal and cultural point of view.
Moreover, open border areas are currently
undergoing particular growth dynamics which have
given rise to numerous cross-border spatial planning
issues. In this context, the Strasbourg-Ortenau
Eurodistrict Project (French-German cross-border
territory) is promoting the development of cross-
border initiatives in what is a pilot scheme for the
EU. Within this pilot region, we will be focusing
specifically on the Strasbourg-Kehl cross-border
Area (SKA).
Trans-national territorial analyses are constrained
by the problem of geographical information and data
harmonization (i.e. scale, temporality, accuracy of
data). Classical planning approaches and methods
are therefore often incapable of addressing the
complexity of these situations and predicting their
spatial implications. In this context, spatial
simulations are widely viewed as an appropriate tool
to help planner stake decisions. Such simulations
rely on several kinds of simulations models, among
which Cellular Automata (CA) are particularly well
designed for managing spatial planning issues.
CA are considered useful tools for modeling and
simulating urban development because they allow us
to implement simple spatial rules based on empirical
knowledge that take into account the role of
neighborhood in urban growth processes. They have
been widely used to simulate land use changes and
scenarios for future urban development in different
contexts. The seminal work of Couclelis (1985,
1987), White and Engelen (1993), Batty and Xie
(1994) and later Clarke et al. (1997) paved the way
for CA to be considered a powerful tool for
modeling and simulating spatial phenomena of
various types. The research on CA gathered new
momentum during the 2000s in a surge in research
that coincided with a second wave of faster and
cheaper computational capacities (Torrens 2000,
Benenson and Torrens 2004, Couclelis 2005,
Koomen et al. 2011). The aim of this paper is to
present prospective urban development scenarios for
the Strasbourg-Kehl area in the medium term.
366
Antoni, J-P., Judge, V., Vuidel, G. and Klein, O.
Using Constraint Cellular Automata to Simulate Urban Development in a Cross-border Area.
DOI: 10.5220/0006387703660369
In Proceedings of the 3rd International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2017), pages 366-369
ISBN: 978-989-758-252-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 METHODOLOGY
From a methodological point of view, the LucSim
CA model can be defined as a constrained cellular
automata designed to aid decision-making in urban
and land planning. Its main original feature
(compared to similar geographical CA) is to simplify
the land-use evolution processes into two
“fundamental” steps, namely the quantification and
location of future land use changes. Land use is
assessed within a cellular grid space obtained from
the European Corine Land Cover classification.
2.1 Quantification of Land Use
Changes
Our first step was to quantify the land use change
process. Comparing two static land use images or
vectors (1990, 2006) is of little interest in the
context of a dynamic simulation, but finding out
what happens between each image can enable us to
formulate a transition process. By comparing the
land use categories date by date and cell by cell, it is
possible to determine cellular changes between t and
t+1, and identify the land use dynamics.
Theoretically, each cell can move from one land use
category to another, or remain in the same category.
The dynamics of the model can therefore be
presented as a series of possible transitions from one
land use category k at time t to another land use
category l at t+1.
The Markov chain process gives us the chance to
prospectively calculate future states from known
past states, based on observation of past trends and
probabilities. According to the method, this
calculation is based on the assumption that future
changes will follow the trend of past changes, but as
it is based on a matrix calculation, this trend is not
necessarily linear. In our case, LucSim uses the
original transition matrix to calculate the number of
cells in each land use category in 2022, 2038, 2054,
etc., from 1990 and 2006 land uses (same interval of
16 years between each date). This system gives us a
better picture of urban dynamics by calculating land
use vectors for each future date. It also indicates that
the total number of cells that should be urbanized
(including UR, IN and EQ categories) by 2038 is
8,811.
2.2 Location of Land Use Changes
The second step was to try to identify the location of
land use changes with a method based on Cellular
Automata. Cellular Automata have the double
advantage of being able to determine the land use
category of cells according to their neighbourhood,
and also to integrate the previous Markovian
process. By definition, CA are based on the
assumption that the class of each cell is determined
by its neighbourhood, or in our case, by the land use
categories of surrounding cells within a given radius.
CA can then be constrained with the results of
the Markov chain to produce a model for land use
change simulations. This means that the CA
transition process from one given category to
another is automatically halted when the number of
cells given by the MC for each date is reached. This
CA transition process is based on transition rules
that allow us to consider different configurations.
The main problem is then to define relevant rules to
simulate realistic scenarios of spatial development, a
generalized problem in all modelling and especially
in model calibration.
3 SPATIAL DEVELOPMENT
SCENARIOS
We decided to base all our scenarios on the general
assumption that new built-up areas can only be
developed on agricultural fields. These scenarios
present three contrasted configurations for land use
changes in 2038: urban sprawl, urban densification
and cross-border development based on the bridge
connections available on the SKA specific test-field.
Although results are calculated at the original 100
meters resolution of the land use cells, they are
aggregated and mapped within a larger grid with a
resolution of 4,000 meters to improve visualization
of the changes.
3.1 Landscape Sprawl
The main idea of the “Landscape Sprawl” (LS)
scenario is that future residential preferences will
favor natural landscapes and rural amenities, as well
as relative proximity to slightly dense urban areas
(villages).
Figure 1: “Landscape sprawl” scenario: land use changes
simulation in 2038.
Using Constraint Cellular Automata to Simulate Urban Development in a Cross-border Area
367
The LS scenario (Fig. 1) leads to a gain of 8,976
cells in only 2 CA iterations. This result can be
explained by considering spatial configurations that
are very generic and numerous in the case of the
rules created above. LucSim therefore quickly spots
the cells that meet the requirements to be
transformed into urban land. A typical example of
this process of urbanization can be seen between the
“Piémont” area and the high density urban area of
Strasbourg. We can also observe a generalized
expansion of areas with low urban density (max
200) and a high dispersion of the cells that become
urbanized. Nevertheless, this general dispersion is
quite homogeneous except for a slight concentration
around small cities. The urban expansion on the
German side appears to be more linear than in
France, which is probably due to the topographic
features in that area.
3.2 Urban Densification
The main idea of the “Urban Densification” (UD)
scenario is that future residential preferences will
favor dense urban areas, close to urban amenities
(e.g. parks, sport and leisure facilities), but relatively
far away from industry and related nuisances.
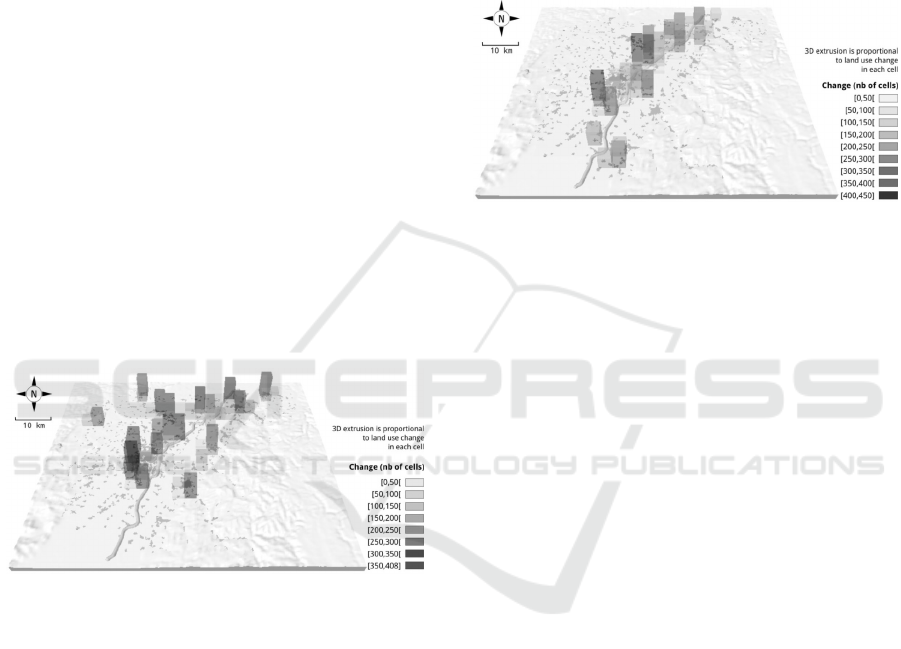
Figure 2: “Urban densification” scenario: land use changes
simulation in 2038.
The UD scenario (Fig. 2) produces a gain of 9,391
cells in 9 iterations. A much higher number of
iterations is needed because the rules for this
configuration make the transition less likely to
happen. Moreover the Markov constraint can only
be achieved when newly urbanized cells are taken
into account. This explains why the process is
slower and more iterations are required to converge
toward the solution provided by the set of rules for
the UD scenario. In this case new urbanization is
concentrated around the bigger cities and expands on
the existing urban structure rather than following the
area’s physical geography features. The fact that the
existing urban area is already much larger on the
French side favors further urbanization on this side.
The urban density is clearly higher than in the LS
scenario (max 408).
3.3 Bridge Transbordering
The main idea of the “Bridge Transbordering” (BT)
scenario is that future residential preferences will
favor mixed residential areas (with both LS and UD
scenarios), located in quite heavily urbanized areas
near the border crossing points.
Figure 3: ‘Bridge Transbordering’ scenarios: simulation of
land use changes in 2038.
The BT scenario (Fig. 3) leads to gains of 8,852
cells in 10 iterations, roughly the same number as
the UD scenario. As in the previous scenario, few
spatial configurations are adapted to the transition
towards urban land use categories. This situation
leads to urban development being highly
concentrated in certain places in the study area (max
450), most of which are close to the River Rhine and
its crossing points (bridges, ferry). New high density
urban development is also predicted around the big
cities. Urban development will be essentially linear
and more intensive on the French side (especially
around the southern part of Strasbourg city, and
close to the Gambsheim dam). The three places most
affected in the German part are: Lahr, Kehl and
around Baden-Baden.
4 DISCUSSION
The three residential development scenarios
presented above in succinct form were developed on
the basis of expert judgement. From a scientific
point of view, our results have not been validated.
Forecasting the future in a complex context is
difficult and in the absence of a crystal ball, there is
no known technique for validating future urban
development results at such a fine scale.
Nevertheless the various scenarios involve realistic
processes and rules based on accurate expert
knowledge to provide images of the future that can
be used in debate and decision-making about
GAMOLCS 2017 - International Workshop on Geomatic Approaches for Modelling Land Change Scenarios
368

desirable urban development and land-use changes.
In this context, the objective of the model is not to
separate France from Germany by offering
independent analyses or forecasts for each one, but
to reflect on scenarios for their common future
development.
5 CONCLUSION
By comparing these different scenarios, we can see
that this model can assess the impact of single
neighbourhood rules on urban development. This
global modelling enables us to study urban changes
easily and efficiently. Breaking down the process
into two steps (MC+CA) makes it sufficiently
straightforward to be simultaneously understood by
all the stakeholders involved in urban planning.
LucSim therefore allows a wide range of different
points of view to be considered and specific actions
to be imagined for territorial development and
innovation, within the perspective of more
sustainable land and urban planning.
ACKNOWLEDGMENTS
The research presented in this chapter is part of the
Smart.Boundary project supported by the Fonds
National de la Recherche in Luxembourg and CNRS
in France (ref. INTER/CNRS/12/02). The authors
would like also to thank the Grasp Program of
LISER for allowing cross-collaboration between the
two teams based in Luxembourg and France.
REFERENCES
Antoni J-P, 2006, Calibrer un modèled’évolution de
l’occupation du sol urbain. L’exemple de Belfort,
Cybergeo : European Journal of Geography
http://cybergeo.revues.org/2436.
Antoni J-P, 2009, Un territoire de projet à co-construire.
In: Grossouvre (de) H, Maulin E (eds) Euro-District
Strasbourg-Ortenau : la construction de l’Europe
réelle. Xénia, pp 25–31
Basse RM, Omrani H, Charif O, et al., 2014, Land use
changes modelling using advanced methods: Cellular
automata and artificial neural networks. The spatial
and explicit representation of land cover dynamics at
the cross-border region scale. Applied Geography
53:160–171.
Batty M, Xie Y, 1994, From Cells to Cities. Environment
and Planning B: Planning and Design 21:531–538
Benenson I, Torrens PM, 2004, Geosimulation: Automata-
based modeling of urban phenomena, 1st edition.
Wiley
Berchtold A, 1998, Chaînes de Markov etmodèles de
transition. Applications aux sciences sociales. Hermes
Science Publications, Paris
Clarke KC, Hoppen S, Gaydos L, 1997, A Self-Modifying
Cellular Automaton Model of Historical Urbanization
in the San Francisco Bay Area. Environment and
Planning B: Planning and Design 24:247–261.
Couclelis H, 1985, Cellular Worlds: a framework for
modeling micro-macro dynamics. Environment and
Planning A 20:99–109.
Couclelis H, 1987, Cellular dynamics: How individual
decisions lead to global urban change. European
Journal of Operational Research 30:344–346
Couclelis H, 2005, “Where has the Future Gone?”
Rethinking the Role of Integrated Land-Use Models in
Spatial Planning. Environment and Planning A
37:1353–1371.
Durr MJ, Kayali ML, 2014, Six millions d'habitants pour
l'Alsace, Chiffres pour l'Alsace, 50
European Environment Agency, 2006, Urban sprawl in
Europe: the ignored challenge. EEA Report.
Feller W, 1968, An Introduction to Probability Theory and
Its Applications, 3rd edition. Wiley
Koomen E, Hilferink M, Borsboom-Van Beurden J, 2011,
Introducing Land Use Scanner. In: Koomen E,
Borsboom-Van Beurden J (eds) Land-Use Modelling
in Planning Practice. Springer, pp 3–21
Timmermans HJP, 2003, The Saga of Integrated Land
Use-Transport Modeling: How Many More Dreams
Before We Wake Up? 10th International Conference
on Travel Behaviour Research. Lucerne, Switzerland,
p 35.
Torrens PM, 2000, How cellular models of urban systems
work (1. theory). CASA Working Paper Series
White R, Engelen G, 1993, Cellular automata and fractal
urban form: a cellular modelling approach to the
evolution of urban land-use patterns.
Environment and
Planning A 25:1175–1199
Using Constraint Cellular Automata to Simulate Urban Development in a Cross-border Area
369
