
Adaptive Bootstrapping for Crowdsourced Indoor Maps
Georgios Pipelidis, Christian Prehofer and Ilias Gerostathopoulos
Fakult
¨
at f
¨
ur Informatik, Technische Universtit
¨
at M
¨
unchen, Munich, Germany
Keywords:
Indoor Mapping, Crowdsourcing, Bootstrapping Process.
Abstract:
Indoor mapping is an important and necessary enabler for many applications. However, indoor places and
their services are very diverse. Furthermore, many technical approaches for indoor mapping exist. While
there is fruitful research on combining some of these techniques, we show the need for flexible, customized
bootstrapping for indoor maps. This includes mapping techniques but also intermediate services which enable
data collection for improving maps and offering enhanced services. We illustrate examples of customizations
of the process in a visual way and argue that the bootstrapping process needs to be adapted to specific buildings
and end-user needs. This process-based view to indoor mapping leads to several research questions regarding
the composition and intermediate steps in such process.
1 INTRODUCTION
Indoor mapping is an important enabler for many ap-
plications such as indoor navigation systems or for
locating points of interest inside a building. This
is a useful service even if indoor localization is not
available. Together with indoor localization tech-
niques, which have been an active area of research
recently (Mautz, 2012), indoor mapping can help ma-
terialize the vision for ubiquitous indoor positioning
system on a worldwide scale (Alzantot and Youssef,
2012).
There is considerable progress in the mapping of
indoor places, and many diverse techniques have been
proposed, ranging from robot-based (El-Hakim and
Boulanger, 1999), vision-based (Gao et al., 2014),
up to crowdsourced mapping (Alzantot and Youssef,
2012). However, most of the existing techniques are
either expensive or difficult to apply, due to prone
to error sensors and methods, and the variety of the
building structures. It remains a challenge to pro-
vide cost-effective, easy-to-apply mapping techniques
which can cover the large volume and variety of in-
door places with their often unique characteristics and
semantics.
Compared to outdoor maps, indoor mapping is
more challenging for several reasons: Indoor places
are very diverse in nature and many of them also
change frequently; consider e.g. remodeling of floors
or new shops in a shopping mall. Secondly, in-
door mapping techniques are very diverse and range
from manual with ad hoc tuning to crowdsourc-
ing techniques. While manual techniques are often
more reliable, the abundance of new personal devices
with advanced sensors (e.g., motion sensors, cam-
eras, gyroscopes, pedometers) also enable sophisti-
cated crowdsourcing of indoor maps (Alzantot and
Youssef, 2012). Third, the services related to indoor
mapping are also very diverse in terms of end-user
needs and technical assumptions. For instance, ar-
chitects have different needs than pedestrians or fire
fighters. Also, some services require localization,
some only mapping, and some only user traces or
landmark identification.
To emphasize the diversity of end-user needs and
assumptions in the services related to indoor map-
ping, consider a hospital: the main service is finding
doctors, patients, or equipment, assuming a well ad-
ministered building with well defined tags for tracing
and localization. Here, manually created maps can be
used—a costly, yet worthy, investment for the hospital
administration. On the other hand, in a shopping mall
with diverse shop owners, diverse infrastructure and
no central management of tags, users also aim to dis-
cover places, find other people and explore the map.
Here, users may have time to contribute to crowd-
sourced map creation in exchange for some useful
apps. Finally, in an automated factory, highly accu-
rate indoor maps can be important in guiding robots,
augmented reality and help avoiding accidents.
Following the above, in this paper we argue that
there will be no single way for mapping indoor places,
but rather a diverse set of techniques and services will
284
Pipelidis, G., Prehofer, C. and Gerostathopoulos, I.
Adaptive Bootstrapping for Crowdsourced Indoor Maps.
DOI: 10.5220/0006369302840289
In Proceedings of the 3rd International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2017), pages 284-289
ISBN: 978-989-758-252-3
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

be used to build up maps and services for indoor lo-
cations in a customized way. Some services may ac-
tually not even require proper maps, as in the case of
a “take me to the exit” service for which only user
traces can be sufficient. We also posit that we will
move towards custom solutions for combining indoor
mapping techniques in order to improve accuracy and
enable a number of diverse services.
This position paper focuses on the combination of
indoor mapping techniques and the services they en-
able. It specifically targets the problem of obtaining
the critical mass of user data for self-starting crowd-
sourcing mapping techniques. In particular, we con-
tribute by highlighting the need for a bootstrapping
process that can be customized to the available tech-
niques and building characteristics and by providing
an example of such a process.
The rest of the paper is structured as follows. Sec-
tion 1.1 overviews the most promising indoor map-
ping techniques. Section 2 provides an overview of
our approach, while Section 2.1 exemplifies it on a
specific bootstrapping process. Section 3 provides a
short assessment of the current state of the art, while
Section 4 puts forward a research roadmap and con-
cludes by summarizing the key points.
1.1 Mapping Techniques
We describe here the most prominent techniques for
creating indoor maps.
Light Detection and Ranging (LiDAR). LIDAR
uses lasers to measure the distance between objects
inside a building (i.e., walls, floors, ceilings etc.) (El-
Hakim and Boulanger, 1999). A LiDAR unit, often
mounted on a robot or vehicle, scans the environ-
ment. The position of the unit is estimated by vS-
LAM (Karlsson et al., 2005). A point cloud is gener-
ated and by identifying contours (i.e. points of similar
distance), a map can be extracted. Semantic annota-
tions are usually manually made by expert surveyors.
Usage of Existing Architectural Blueprints. If
blueprints are encoded in formats such as Industry
Foundation Classes (IFC) (iso, 2013) or Building In-
formation Modeling (BIM) (iso, 2012), they contain
the geometric information that can be readily used
in indoor maps. However, such formats do not in-
clude topological nor semantic information. The last
is usually added manually by expert surveyors, re-
sulting into mapping data encoded into formats such
as IndoorGML (Ind, 2016). Approaches for auto-
matic derivation of topological relations (e.g., adja-
cency and connectivity of rooms) from IFC models
have also been suggested (Liu et al., 2014).
Structure from Motion. In this technique, a 3D
structure of a building can be extracted from a cam-
era (Gao et al., 2014) by capturing many images of
an indoor place and translating them into a single 3D
view. To do this, the camera’s internal and external
parameters, e.g. lens-generated distortion, translation
and rotation matrix have to be known or be retrievable
from common features of the captured images.
Depth Sensors. In this technique, a typical setting
is to have an infrared projector that projects a unique
pattern. An infrared sensor, whose relative distance
to the projector and rotation are known, recognizes
this pattern. A depth map is constructed by analyzing
the unique pattern of infrared light markers by trian-
gulating the distance between the sensor, projector
and the object. Finally, a 3D point cloud is extracted
from stereoscopic view algorithms, from which a
map can be generated (Henry et al., 2012).
Smart Phone 3D Modeling Tools. In this technique,
specialized smart phone apps enable users construct
components of a building (Eaglin et al., 2013). After
initial versions of the maps have been created, other
users can enhance the maps or vote on their accuracy
and completeness.
Activity-based Map Generation. An indoor map
can be transparently and autonomously generated
based on activity recognition of users (Alzantot and
Youssef, 2012). This technique works as follows:
After extracting steps of users by their x and y
coordinates or by a series of trajectories, a point
cloud can be extracted. A map of the indoor place
can be created by fusing data from different users
and identifying places with common patterns. For
example, places where users performing the same
activity (i.e., stairs) can be identified.
2 ADAPTIVE BOOTSTRAPPING
In this section, we outline our envisioned approach
towards indoor mapping, based on the following
observations on the present and future research and
development in indoor mapping:
• Techniques need to be combined. There are many
indoor mapping techniques which differ in terms
of complexity, required resources, and output. For
instance, if one wants to use LiDAR, a localiza-
tion technique has to be in place, and also so-
phisticated laser equipment has to be available.
Activity-based map generation, on the other side,
does not make any major assumptions in terms
of equipment; however, it assumes a plethora of
Adaptive Bootstrapping for Crowdsourced Indoor Maps
285

data. We argue that a combination of different
techniques will be used to create or maintain in-
door maps that are both cost-effective and accu-
rate.
• Bootstrapping is needed for crowdsourcing. As
discussed, we posit there will be no “single-shot”
solution towards indoor mapping; combined solu-
tions, as shown below, will also involve crowd-
sourcing. Therefore an incremental, stepwise
bootstrapping will be needed to obtain user data.
• No single bootstrapping process. We believe that
the diversity of buildings, mapping techniques, as
well as services will lead to individual and custom
processes for such bootstrapping. The processes
will be adapted to end-user needs, available in-
frastructure, available budget, and other factors.
A number of services with different characteris-
tics, users, and assumptions on crowdsourcing effort
can be supported by our approach, e.g.:
Wellness Monitoring. This is a family of emerging
services that provide feedback to users based on their
activities during the day. For example, services that
can track the number of steps that a user did during a
day can be used for identifying the distance traveled
by the user.
Card Swiping. This service may substitute the Mag-
netic stripe cards with smart phone build-in NFC
chips. In combination with other sensor data, it can
be used to generate a general model for identifying
outdoor-indoor transitions and vice versa.
“Take Me to the exit”. This service can work as a
digital Ariadne’s thread, where users will be able to
find their way back to the entrance of indoor places
by following their own captured route in reverse. User
traces collected from this service can be used for gen-
erating a point cloud.
Instruction-based Navigation. This service can pro-
vide basic instructions on how to visit an office or
a classroom in the form of instructions such as ”En-
ter from the north entrance, walk straight for 10 secs,
then turn right, walk up the stairs and enter the door
on the right”.
Elderly Monitoring. This service can be used to
identify accidents involving elderly or people with
special needs in real time by detecting problems in
mobility or patterns that correspond to sudden falls.
Data from such service can be used for semantically
enhancing indoor maps, via adding the use of a room.
Dynamic Meeting Scheduler. This service can use
the (indoor) user position in order to propose meeting
locations that fit the participants’ locations. Data from
this service can be used for labeling indoor spaces.
It is clear that the services related to indoor map-
ping are rather diverse, and make different assump-
tions regarding the maturity and completeness of the
supporting indoor mapping systems. For instance,
wellness monitoring does not assume any complete
mapping or localization system (even though the data
captured from such services can actually allow for
activity-based mapping techniques). Also, “take me
to the exit” does not assume the existence of a com-
plete navigable map, but only of a single well-defined
route from a single user.
An important observation is that services with
rudimentary assumptions in terms of indoor mapping
can act as catalysts for gaining the critical mass of
user data that can enable services with more advanced
mapping needs. For instance, in a hospital building,
the target service might be full-blown indoor navi-
gation, whereas intermediate services might be call
forwarding for medical personnel, room-based local-
ization of equipment, elderly monitoring, and others.
Potential users are the medical personnel, patients,
and visitors. In contrast, consider a university cam-
pus building: the target service can be the same as in
the hospital case, but now intermediate services could
be room finders, “take me to the exit”, wellness mon-
itoring, etc., whereas potential users are now students
and academic employees. Finally, in the case of a sub-
way station, a promising intermediate service is, e.g.,
location-aware ticketing.
In the following, we are providing a way to model
such bootstrapping processes. Our modeling tech-
nique is based on the fact that each indoor mapping
technique can be broken down to a number of tasks
with inputs and outputs. The input of the initial task
indicates the technique’s assumptions. As a result, a
bootstrapping process can be represented as a graph
of tasks. We present an example of this in the next
section.
2.1 Bootstrapping Example
This section introduces an example of a bootstrapping
process for a university campus building. To illustrate
the bootstrapping process, we use a data-flow-like di-
agram depicted in Figure 1.
In this diagram, circular nodes correspond to ar-
tifacts. Each artifact enables the creation of one or
more services. For example, Distance Traveled
(e) can enable a service such as wellness monitoring,
since the walked distance is directly related with exer-
cising. Inputs and outputs of artifacts are visually pre-
sented as solid enumerated arrows which indicate data
GISTAM 2017 - 3rd International Conference on Geographical Information Systems Theory, Applications and Management
286
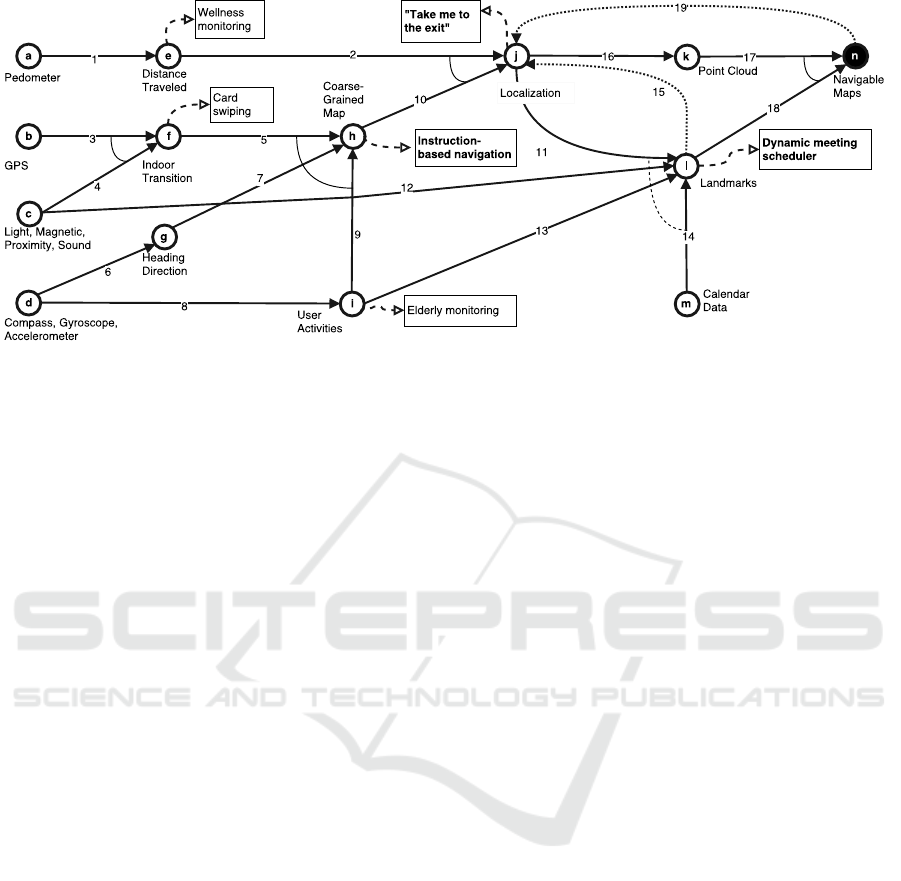
Figure 1: Customized bootstrapping process for a university campus building. Circular nodes are artifacts, arrows are tasks
with inputs and outputs, rectangles are intermediate services (services in bold are described in the text).
flow. For example, the input of Indoor Transition
(f) is GPS signal (3) and IMU (4) data (i.e. ambi-
ent light, magnetic field, proximity and sound). By
reasoning on these input data, similar to (Zhou et al.,
2012), the output is the locations of entrances (5). In
case of more than one input, a solid line connecting
them implies conjunction (e.g. lines 5, 9 and 7); a
dashed line implies disjunction (e.g. 11, 12, 13, 14).
Finally, dotted connections imply additional inputs
which can improve the data quality (e.g. 15).
An artifact can be connected to a number of inter-
mediate services. A service is represented by a rectan-
gle and implies a set of software functionalities which
can be a user-facing application. Finally, the target ar-
tifact is represented as a filled circular node (e.g. n).
Figure 1 presents a set of possible bootstrapping
options. One would start at one or more of the nodes
on the left, e.g. assuming devices with GPS (b)
or compass/gyroscope and accelerometer (d). Infor-
mally speaking, we can then proceed to some of the
connected nodes (e.g. f or g), based on user data gen-
erated from operating services possible at this point.
Based on the new data, we can proceed with further
steps in this graph.
As depicted in Figure 1, the entire bootstrap-
ping process could emerge through existing services,
such as wellness monitoring or card swiping. Of
course, alternative paths are also available. For exam-
ple the Coarse-Grained Map step could be skipped;
similarly, User activities might not be needed if
semantically-rich calendar data are available.
In our example, the target service is to enable in-
door navigation based on dynamically created maps
that capture the geometry, topology and semantics of
the building. The above information needs to be inte-
grated in a data model, e.g. by using and extending
the IndoorGML standard (Ind, 2016). IndoorGML
provides the constructs to denote subdivisions of in-
door places (i.e. rooms), spaces that connect two in-
door places (e.g., inner doors), spaces that connect
indoor places to outdoor ones (e.g., entrance doors),
spaces acting as passages between indoor places (e.g.,
corridors, stairs), and other important properties.
There are a number of intermediate services
among the ones described in the beginning of this
Section. We describe here the indoor mapping tech-
niques and associated artifacts they rely upon:
Instruction-based Navigation. To provide this ser-
vice, a Coarse-Grained Map is needed. This is a
model that includes the elements essential for rout-
ing, such as corridors, stairs, doors, and entrances.
This is the outcome of merging three other arti-
facts: Indoor Transition, Heading Direction
and User Activities (tasks 5, 7, 9). The first
one is derived by using GPS data (task 3) and fus-
ing them with other mobile sensor data such as light,
magnetic, and proximity data (task 4). The intuition is
that the sensors’ behavior changes during the outdoor-
indoor transition, where the GPS uncertainty and the
WiFi received signal strength are both increasing.
Heading Direction can be derived via machine
learning algorithms (embodied in task 6) that work
on compass, gyroscope and accelerometer data. The
intuition is, if a phone’s pose is identified, it can be
used to extract the user’s local direction (i.e. in the
phone’s coordinate system) via monitoring the accel-
eration changes due to the gait movement, then relate
this direction to a global system using the compass.
Finally, User Activities can be derived from
the same data using machine learning techniques with
high accuracy (task 8), since moving and stationary
activities can be detected from disturbances in the ac-
Adaptive Bootstrapping for Crowdsourced Indoor Maps
287

celeration sensor, while movements on the vertical
space can be detected from disturbances in the baro-
metric sensor.
Dynamic Meeting Scheduler. This service is based
on the Landmarks artifact. Landmarks are distinc-
tive locations in a building. They are either locations
where users consistently perform the same activity
(e.g., stairs)—contributed by the User Activities
(task 13)—or locations with distinct characteristics
of a measured quantity (e.g., WiFi RSS, geomag-
netism, sound, light)—contributed by the Light,
Magnetic, Proximity, Sound (task 12). In both
cases, landmarks need to be localized in a building—
hence the dependence on Localization (task 11).
Landmarks can also be derived from Calendar Data
(task 14) via semantics (e.g., meeting room name).
“Take Me to the exit”. In our example, we as-
sume that there is no localization infrastructure in
place. As a result, we would need to resort to pedes-
trian dead reckoning techniques (Kourogi and Kurata,
2014). Pedestrian dead reckoning is based on approx-
imating the position of a user by measuring the dis-
tance traveled when walking towards a direction from
a known point. This explains why Localization de-
pends on the Distance Traveled (task 2) and the
Coarse-Grained Map (task 10). The former is de-
rived directly from pedometer data (task 1). The lat-
ter contains information regarding the heading direc-
tion (task 7) and the indoor transition points (task
5). These points are the initial known points in the
dead reckoning algorithm. Localization can also
depend on Landmarks for re-calibrating the algorithm
(restarting the error) in distinct locations (task 15).
Finally, Localization provides input for the cre-
ation of Point Cloud (task 16) using existing tech-
niques, and subsequently of Navigable Maps (task
17). Navigable Maps are also enhanced by the iden-
tified Landmarks (task 18). In particular, activity-
related landmarks can be a rich source of seman-
tic annotation for maps (e.g., places where people
sit together for long time can be labeled as meeting
rooms). At the same time, Navigable Maps can en-
hance Localization by error recalibration on the ba-
sis of non-navigable places (task 19). This can be
achieved either by relating user traces to sets of pos-
sible routes or via uniquely identified locations (e.g.
stairs), in which case the context of users (e.g. ”climb-
ing stairs”) can be used for re-positioning them.
It is important to note that the example bootstrap-
ping process illustrates a cost-effective solution with-
out dedicated equipment and expensive manual work.
As an alternative, consider hiring an indoor local-
ization company, for performing tasks 1 and 2 in
our example—this would have led to a different cus-
tomization of the same bootstrapping process.
3 RELATED WORK
To our understanding, there is no prior work on sys-
tematic bootstrapping of indoor maps. There are
several works which integrate different intermediate
techniques, which we list below.
Heading Direction. (Roy et al., 2014) detect the
discreate signal vibration when the heel strikes the
ground during a gait circle. Then they use this data
point as a reference and scan the signal to identify the
dominant body’s movement partition from the entire
signal segment. Finally, they translate the walking di-
rection to the global magnetic system. However, their
framework is highly dependent on the terrain as well
as on user behavior.
Indoor-Outdoor Transition. (Zhou et al., 2012) do
not only use the drop of GPS accuracy as an indica-
tion of the I/O transition, but also use light censors,
cell tower signals, and magnetic field sensors. The ac-
celeration and proximity sensor time series are fused
for identifying the I/O transition.
Activity Recognition. (Nguyen et al., 2015) use
a Support Vector Machine classifier to distinguish
among moving activities such as walking, running,
and ascending and descending stairs and improve ex-
isting position systems. Their observation is that the
step length varies when a user is walking, running or
climbing stairs. Their approach is argued to work in
various phone poses. However, their approach uses
a large amount of features, which can result in high
computational demands.
4 DISCUSSION AND OUTLOOK
Following the diversity of indoor places, techniques
and services, we have outlined our position for an
adaptive bootstrapping process. This includes map-
ping techniques but also intermediate services which
enable data collection for improving maps and offer-
ing enhanced services. We have illustrated examples
of customizations of the process in a visual way and
argue that the bootstrapping
Our view integrates many existing mapping tech-
niques as well as services and also assumes consider-
able progress in each of these disciplines. As we fo-
cus more on how the different processes for mapping
can be integrated, our vision is orthogonal to research
roadmaps of specific techniques.
GISTAM 2017 - 3rd International Conference on Geographical Information Systems Theory, Applications and Management
288

Our new bootstrapping approach also gives rise to
the several challenges:
Bootstrapping Processes. We need research to un-
derstand and model bootstrapping processes, similar
to our example, in order to obtain a more complete
picture of the techniques and services that are avail-
able. Also, most of the services described in Sec-
tion 2.1 are open challenges mainly due to the inher-
ent complexity of indoor localization: existing sen-
sors (both in phones and specialized devices) fail to
effectively propagate a discrete signal patterns in in-
door space, making simple triangulation-based tech-
niques infeasible. Additionally, robust heading direc-
tion identification independent of the phone’s pose re-
mains an open challenge (Zhou et al., 2012).
Intermediate Targets/Artifacts. We need to
understand what can be useful intermediate tar-
gets/artifacts, which are both feasible w.r.t mapping
techniques and also enable useful services. More-
over, protocols need to be emerged to enable informa-
tion exchange through APIs between the different ser-
vices. Importantly, we need to manage the uncertainty
inherent to both sensor reading and human users, fil-
ter out outliers, and in general work with noisy data.
Trust models to manage ambiguous information ex-
tracted from multiple users need to be emerged. Ex-
isting indoor data models have to be enhanced in order
to cope with such incomplete, ambiguous or inaccu-
rate models.
Process Customization. We need research to under-
stand when and how to apply different bootstrapping
processes to specific buildings. This can also lead to
easier or automatic customization of bootstrapping to
specific classes of buildings.
ACKNOWLEDGMENTS
This work is part of the TUM Living Lab Connected
Mobility project and has been funded by the Bay-
erisches Staatsministerium f
¨
ur Wirtschaft und Me-
dien, Energie und Technologie.
REFERENCES
(2012). ISO/TS 12911:2012 - Framework for building in-
formation modelling (BIM) guidance.
(2013). ISO 16739:2013 - Industry Foundation Classes
(IFC) for data sharing in the construction and facility
management industries.
(2016). OGC IndoorGML version 1.0.2.
http://www.opengeospatial.org/standards/indoorgml.
Alzantot, M. and Youssef, M. (2012). CrowdInside: Auto-
matic Construction of Indoor Floorplans. In SIGSPA-
TIAL ’12, pages 99–108. ACM.
Eaglin, T., Subramanian, K., and Payton, J. (2013). 3D
modeling by the masses: A mobile app for modeling
buildings. In Proc. of PERCOM ’13 Workshops, pages
315–317. IEEE.
El-Hakim, S. F. and Boulanger, P. (1999). Mobile system
for indoor 3-d mapping and creating virtual environ-
ments. US Patent 6,009,359.
Gao, R., Zhao, M., Ye, T., Ye, F., Wang, Y., Bian, K., Wang,
T., and Li, X. (2014). Jigsaw: indoor floor plan recon-
struction via mobile crowdsensing. In Proc. of Mobi-
Com ’14, pages 249–260. ACM.
Henry, P., Krainin, M., Herbst, E., Ren, X., and Fox, D.
(2012). RGB-D mapping: Using Kinect-style depth
cameras for dense 3D modeling of indoor environ-
ments. Int. J. Robot. Res., 31(5):647–663.
Karlsson, N., Di Bernardo, E., Ostrowski, J., Goncalves,
L., Pirjanian, P., and Munich, M. E. (2005). The vs-
lam algorithm for robust localization and mapping. In
Robotics and Automation, 2005. ICRA 2005. Proceed-
ings of the 2005 IEEE International Conference on,
pages 24–29. IEEE.
Kourogi, M. and Kurata, T. (2014). A method of pedes-
trian dead reckoning for smartphones using frequency
domain analysis on patterns of acceleration and angu-
lar velocity. In Proc. of PLANS ’14, pages 164–168.
IEEE.
Liu, H., Shi, R., Zhu, L., and Jing, C. (2014). Conver-
sion of model file information from IFC to GML. In
IGARSS’14, pages 3133–3136. IEEE.
Mautz, R. (2012). Indoor positioning technologies. ETH
Zurich, Department of Civil, Environmental and Geo-
matic Engineering.
Nguyen, P. et al. (2015). User-friendly activity recogni-
tion using SVM classifier and informative features. In
IPIN’15, pages 1–8.
Roy, N., Wang, H., and Roy Choudhury, R. (2014). I am a
smartphone and i can tell my user’s walking direction.
pages 329–342. ACM Press.
Zhou, P., Zheng, Y., Li, Z., Li, M., and Shen, G. (2012).
Iodetector: A generic service for indoor outdoor de-
tection. In SenSys ’12, SenSys ’12, pages 113–126.
ACM.
Adaptive Bootstrapping for Crowdsourced Indoor Maps
289
