
A LAHC-based Job Scheduling Strategy to Improve Big Data Processing
in Geo-distributed Contexts
Marco Cavallo, Giuseppe Di Modica, Carmelo Polito and Orazio Tomarchio
Department of Electrical, Electronic and Computer Engineering, University of Catania, Catania, Italy
Keywords:
Big Data, MapReduce, Hierarchical Hadoop, Job Scheduling, LAHC.
Abstract:
The wide spread adoption of IoT technologies has resulted in generation of huge amount of data, or Big Data,
which has to be collected, stored and processed through new techniques to produce value in the best possible
way. Distributed computing frameworks such as Hadoop, based on the MapReduce paradigm, have been used
to process such amounts of data by exploiting the computing power of many cluster nodes. Unfortunately, in
many real big data applications the data to be processed reside in various computationally heterogeneous data
centers distributed in different locations. In this context the Hadoop performance collapses dramatically. To
face this issue, we developed a Hierarchical Hadoop Framework (H2F) capable of scheduling and distribut-
ing tasks among geographically distant clusters in a way that minimizes the overall jobs execution time. In
this work the focus is put on the definition of a job scheduling system based on a one-point iterative search
algorithm that increases the framework scalability while guaranteeing good job performance.
1 INTRODUCTION
The Internet of Things (IoT) refers to the use of sen-
sors, actuators, and data communications technology
built into physical objects that enable those objects
to be tracked, coordinated or controlled across a data
network or the Internet (Miorandi et al., 2012). The
number of IoT enabled devices is expected to consid-
erably grow in the near future enabling new applica-
tion scenarios among which the smart city one is a no-
table example. All of these applications are based on
sensing, capturing, collecting real time data from up
to billions of devices, asking for methodologies and
technologies able to effectively process such amount
of data which, differently from more common scenar-
ios, are located in different geographic locations (Jay-
alath et al., 2014).
This paper addresses big data computing issues in
those scenarios where data are scattered over many
sites which are interconnected to each other through
geographic network links. For these particular com-
puting contexts, we argue that a careful design of the
procedures that enforce the data analysis is needed in
order to obtain reliable results within the desired time.
Some distributed computing frameworks provide
an effective mean of processing big data, such as the
Hadoop one, probably the most widespread imple-
mentation of the well-known MapReduce paradigm.
However, since Hadoop has been mainly designed to
work on clusters of homogeneous computing nodes
belonging to the same local area network, it is not well
suited to work on geographically distributed data. In
our work we address this issue, trying to take into
account the actual heterogeneity of nodes, network
links and data distribution in order to optimize the
job execution time. Our solution follows a hierar-
chical approach, where a top-level entity will take
care of serving a submitted job: the job is split into
a number of bottom-level, independent MapReduce
sub-jobs that are scheduled to run on the sites where
data natively reside or have been ad-hoc moved to.
The focus of this paper is on a new job scheduling
algorithm with respect to previous work of authors
(Cavallo et al., 2015) based on a one-point iterative
search algorithm that improve the scalability of the
whole systems while maintaining good performances.
The remainder of the paper is organized in the fol-
lowing way. Section 2 present related works. Sec-
tion 3 provides an overview of the overall system ar-
chitecture and its behavior, while Section 4 describes
the details of the job scheduling algorithm. Section
5 presents some experimental results of the proposed
job scheduling algorithm. Finally, Section 6 con-
cludes the work.
92
Cavallo, M., Modica, G., Polito, C. and Tomarchio, O.
A LAHC-based Job Scheduling Strategy to Improve Big Data Processing in Geo-distributed Contexts.
DOI: 10.5220/0006307100920101
In Proceedings of the 2nd International Conference on Internet of Things, Big Data and Security (IoTBDS 2017), pages 92-101
ISBN: 978-989-758-245-5
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
In the literature two main approaches can be found
that address the processing of geo-distributed big
data: a) enhanced versions of the plain Hadoop im-
plementation which account for the nodes and the
network heterogeneity (Geo-hadoop approach); b) hi-
erarchical frameworks which gather and merge re-
sults from many Hadoop instances locally run on dis-
tributed clusters (Hierarchical approach). The for-
mer approach aims at optimizing the job performance
through the enforcement of a smart orchestration of
the Hadoop steps. The latter’s philosophy is to exploit
the native potentiality of Hadoop on a local base and
then merge the results collected from the distributed
computation. In the following a review of those works
is provided.
Geo-hadoop approaches reconsider the phases of the
job’s execution flow (Push, Map, Shuffle, Reduce)
in a perspective where data are distributed at a geo-
graphic scale, and the available resources (compute
nodes and network bandwidth) are not homogeneous.
In the aim of reducing the job’s average processing
time, phases and the relative timing must be ade-
quately coordinated. Some researchers have proposed
enhanced version of Hadoop capable of optimizing
only a single phase (Kim et al., 2011; Mattess et al.,
2013). Heintz et al.(Heintz et al., 2014) analyze the
dynamics of the phases and address the need of mak-
ing a comprehensive, end-to-end optimization of the
job’s execution flow. To this end, they present an an-
alytical model which accounts for parameters such as
the network links, the nodes capacity and the applica-
tions profile, and transforms the processing time min-
imization problem into a linear programming prob-
lem solvable with the Mixed Integer Programming
technique. In (Zhang et al., 2014) authors propose
an enhanced version of the Hadoop algorithm which
is said to improve the performance of Hadoop in a
multi-datacenter cloud. Improvements span the whole
MapReduce process, and concern the capability of the
system to predict the localization of MapReduce jobs
and to prefetch the data allocated as input to the Map
processes. Changes in the Hadoop algorithm regarded
the modification of the job and task scheduler, as well
as of the HDFS’ data placement policy.
Hierarchical approaches tackle the problem from a
perspective that envisions two (or sometimes more)
computing levels: a bottom level, where several plain
MapReduce computations occur on local data only,
and a top level, where a central entity coordinates the
gathering of local computations and the packaging of
the final result. A clear advantage of this approach
is that there is no need to modify the Hadoop algo-
rithm, as its original version can be used to elaborate
data on a local cluster. Still a strategy needs to be
conceived to establish how to redistribute data among
the available clusters in order to optimize the job’s
overall processing time. In (Luo et al., 2011) au-
thors present a hierarchical MapReduce architecture
and introduces a load-balancing algorithm that makes
workload distribution across multiple clusters. The
balancing is guided by the number of cores available
on each cluster, the number of Map tasks potentially
runnable at each cluster and the nature (CPU or I/O
bound) of the application. The authors also propose
to compress data before their migration from one data
center to another. Jayalath et al.(Jayalath et al., 2014)
make an exhaustive analysis of the issues concerning
the execution of MapReduce on geo-distributed data.
The particular context addressed by authors is the one
in which multiple MapReduce operations need to be
performed in sequence on the same data. They lean
towards a hierarchical approach, and propose to repre-
sent all the possible jobs’ execution paths by means of
a data transformation graph to be used for the determi-
nation of optimized schedules for job sequences. The
well-known Dijkstra’s shortest path algorithm is then
used to determine the optimized schedule. In (Yang
et al., 2007) authors introduce an extra MapReduce
phase named “merge”, that works after map and re-
duce phases, and extends the MapReduce model for
heterogeneous data. The model turns to be useful
in the specific context of relational database, as it is
capable of expressing relational algebra operators as
well as of implementing several join algorithms. The
framework proposed in this paper follows a hierarchi-
cal approach (Cavallo et al., 2016a). We envisaged
two levels of computation in which at the bottom level
the work of data processing occurs and the top level is
entitled with gathering the results of computation and
packaging the final result. With respect to the cited
works, our framework exploits fresh information con-
tinuously sensed from the distributed computing con-
text and introduces a novel Application Profiling ap-
proach which tries to assess the computing behavior
of jobs; such information is then used as an input to
the job scheduler that will seek for the job’s optimum
execution flow. Specifically, in this paper we propose
an enhancement of the job scheduling algorithm with
respect to the one presented in (Cavallo et al., 2015),
which promises to deliver good job schedules in rel-
atively short time, and that is capable of scaling well
even in very complex computing scenarios.
A LAHC-based Job Scheduling Strategy to Improve Big Data Processing in Geo-distributed Contexts
93

3 HIERARCHICAL HADOOP
MapReduce is a programming model for process-
ing parallelizable problems across huge datasets us-
ing a large number of nodes. According to this
paradigm, when a generic computation request is sub-
mitted (job), a scheduling system is in charge of split-
ting the job in several tasks and assigning the tasks
to a group of nodes within the cluster. The total time
elapsed from the job submission to the computation
end (some refers to its as makespan) is a useful pa-
rameter for measuring the performance of the job ex-
ecution that depends on the size of the data to be pro-
cessed and the job’s execution flow. In homogeneous
clusters of nodes the job’s execution flow is influ-
enced by the scheduling system (the sequence of tasks
that the job is split in) and the computing power of the
cluster nodes where the tasks are actually executed.
In reality, modern infrastructure are characterized by
computing nodes residing in distributed clusters geo-
graphically distant to each other’s. In this heteroge-
neous scenario additional parameters may affect the
job performance. Communication links among clus-
ters (inter-cluster links) are often disomogeneous and
have a much lower capacity than communication links
among nodes within a cluster (intra-cluster links).
Also, clusters are not designed to have similar or com-
parable computing capacity, therefore they might hap-
pen to be heterogeneous in terms of computing power.
Third, it is not rare that the data set to be processed
are unevenly distributed over the clusters. So basi-
cally, if a scheduling system does not account for this
unbalancement (nodes capacity, communication links
capacity, dataset distribution) the overall job’s per-
formance may degrade dramatically. To face these
problems we followed a Hierarchical Map Reduce ap-
proach and designed a framework, called Hierarchi-
cal Hadoop Framework (H2F), which is composed
of a top-level scheduling system that sits on top of
a bottom-level distributed computing context and is
aware of the dynamic and heterogeneous conditions
of the underlying computing context. Information
from the bottom level are retrieved by periodically
sensing the context and are used by a job scheduler
to generate a job execution flow that maximizes the
job performance.
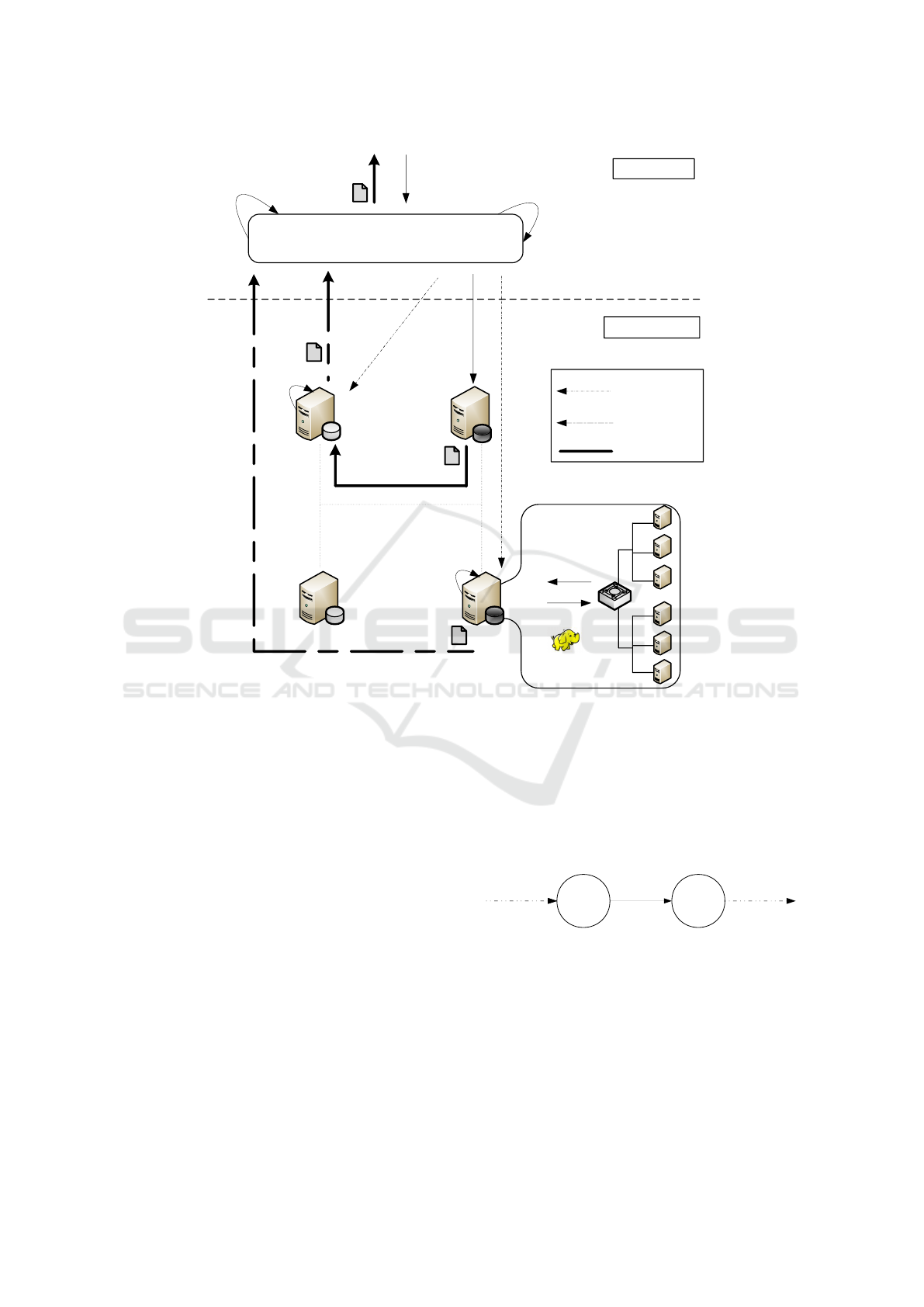
Figure 1 shows a basic reference scenario ad-
dressed by our proposal. Computing Sites populate
the bottom level of the hierarchy. Each site owns a
certain amount of data and is capable of running plain
Hadoop jobs. Upon receiving a job request, a site
performs the whole MapReduce process on the local
cluster(s) and returns the result of the elaboration to
the top-level. The top-level Manager owns the sys-
tem’s business logic and is in charge of the manage-
ment of the geo-distributed parallel computing. Upon
the submission of a Hadoop top-level job, the busi-
ness logic schedules the set of sub-jobs to be spread
in the distributed context, collects the sub-job results
and packages the overall calculation result.
In Figure 1 the details of the job execution pro-
cess are shown. In particular, the depicted scenario is
composed of four geo-distributed Sites that hold com-
pany’s business data sets. The numbered arrows de-
scribe a typical execution flow triggered by the sub-
mission of a top-level job. This specific case envi-
sioned a shift of data from one Site to another Site,
and the run of local MapReduce sub-jobs on two
Sites. Here follows a step-by-step description of the
actions taken by the system to serve the job:
1. The Top-Level Manager receives a request of job
execution on a specific data set.
2. A Top-level Job Execution Plan is generated
(TJEP), using information about a) the status of
the bottom level layer like the distribution of the
data set among Sites, b) the current computing ca-
pabilities of Sites, c) the topology of the network
and d) the current capacity of its links.
3. The Master component within the Top-Level
Manager applies the plan received from the Or-
chestrator. According to the plan, it send a mes-
sage to Site1 in order to shift data to Site4.
4. The actual data shift from Site1 to Site4 takes
place.
5. According to the plan, the Master sends a message
to trigger the sub-jobs run on the sites where data
reside. In particular, top-level Map tasks are trig-
gered to run on Site2 and Site4 respectively. We
remind that a top-level Map task corresponds to a
Hadoop sub-job.
6. Site2 and Site4 executes local Hadoop jobs on
their respective data sets.
7. Sites sends the results obtained from local execu-
tions to the Top-Level Manager.
8. The Global Reducer component within the Top-
Level Manager collects all the partial results com-
ing from the bottom level layer and performs the
reduction on this data.
9. Final result is forwarded to the Job submitter.
The whole job execution process is transparent to the
submitter, who just needs to provide the job to execute
and a pointer to the target data the job will have to
process.
IoTBDS 2017 - 2nd International Conference on Internet of Things, Big Data and Security
94
Top-Level Job
Output Data
Result
Local Hadoop Job
Top Level
1
8
4
3
Data Transfer
Top Level Manager
Execute Top-Level
MapTask
5
5
6
6
Reduce
7
Bottom Level
MoveData
Site1
Site3
Site2
Push Top-Level
Map Result
Site4
MapReduce
MapReduce
6
9
Generate TJEP
2
Figure 1: Job Execution Flow.
4 JOB SCHEDULING
Basically, the scheduling system’s strategy is to gen-
erate all the possible job execution paths for the ad-
dressed distributed computing context. Each gener-
ated path is characterized by a score, which is a func-
tion of the estimated job completion time (the shorter
the estimated completion time, the higher the score).
The calculation of the score for a given path con-
sists in the estimation of the path’s completion time.
The path exhibiting the lowest completion time (best
score) will be selected to enforce the job execution.
The job’s execution path representation is based
on a graph model where each graph node represents
either a Data Computing Element (site) or a Data
Transport Element (network link). Arcs between
nodes are used to represent the sequence of nodes in
an execution path (see Figure 2). A node representing
a computing element elaborates data, therefore it will
produce an output data flow whose size is different
than that of the input data; a node representing a data
transport element just transports data, so for that node
the input data size and the output data are equal.
Node
j
Node
j+1
DataSize
j-1, j
DataSize
j, j+i
DataSize
j+1, j+2
β
j
Throughput
j
β
j+1
Throughput
j+1
Figure 2: Nodes’ representation model.
Nodes are characterized by two parameters: the
compression factor β
app
, that is used to estimate the
data produced by a node, and the T hroughput, de-
fined as the amount of data that the node is able to pro-
cess per time unit. The β
app
value for a Data Comput-
ing Element is equal to the ratio between the produced
output data and the input data to elaborate, while for
A LAHC-based Job Scheduling Strategy to Improve Big Data Processing in Geo-distributed Contexts
95
the Data Transport Elements it is equals to 1 because
there is no data computation occurring in a data trans-
fer. The T hroughput of a Data Computing Element is
rate at which the node is capable of producing data in
output, and of course it depends on the Site’s com-
puting capacity; for a Data Transport Elements the
Throughput just corresponds to the link capacity. A
generic node’s execution time is defined as the ratio
between the input data size and the T hroughput of
the node.
In Figure 2, the label value of the arc connecting
node j −th to node ( j + 1) −th is given by:
DataSize
j, j+1
= DataSize
j−1, j
× β
j
(1)
A generic node j’s execution time is defined as:
T
j
=
DataSize
j−1, j
T hroughput
j
(2)
Both the β and the Throughput are specific to the
job’s application that is going to be executed, and of
course they are not available at job submission time.
To estimate these parameters, we run the job on small-
sized samples of the data to elaborate. These test re-
sults allow us to build an application profile made of
both the β and the T hroughput parameters, which will
be used as input of the top level job execution plan
process performed by the scheduler. The estimation
procedure is described in details in our previous work
(Cavallo et al., 2016b), where we proposed a study
of the job’s Application Profile and analyzed the be-
havior of well know Map Reduce applications. The
number of the job’s potential execution paths depends
on the set of computing nodes, the links’ number and
capacity and the data size. A job’s execution path has
as many branches as the number of Map Reduce sub-
jobs that will be run. Every branch starts at the root
node (initial node) and ends at the Global Reducer’s
node. We define the execution time of a branch to be
the sum of the execution times of the nodes belonging
to the branch; the Global Reducer node’s execution
time is left out of this sum. The execution carried out
through branches are independent of each other’s, so
branches will have different execution times. In order
for the global reducing to start, all branches will have
to produce and move their results to the reducer Site.
The execution time of the Global Reducer is given
by the summation of the sizes of the data sets com-
ing from all the branches over the node’s estimated
throughput.
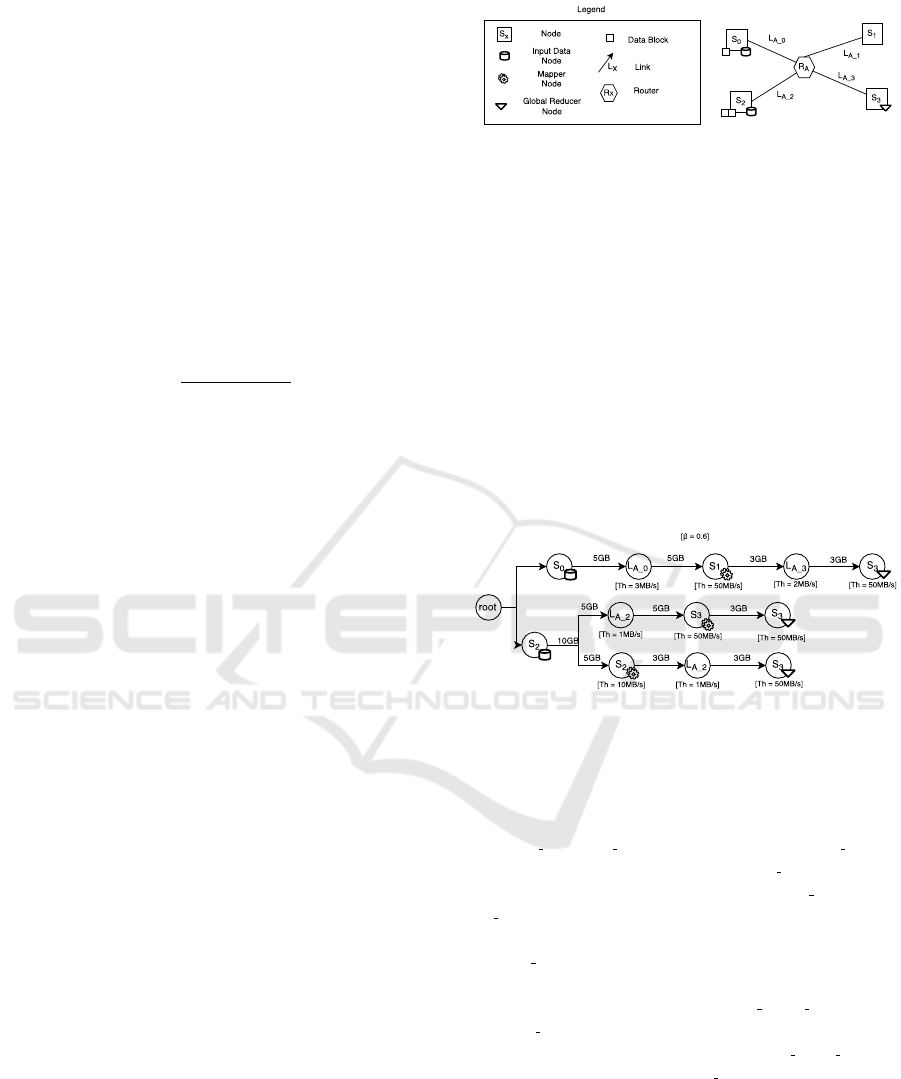
Let us show an example of execution path mod-
eling on a reference scenario. The example topology
(see Figure 3) is composed of four sites and a geo-
graphic network interconnecting the sites.
Let us suppose that a submitted top-level job
needs to process a 15 GB data set distributed among
Figure 3: Example Topology.
the Sites S
0
(5 GB) and S
2
(10 GB). In this example
we assume that the data block size (minimum com-
putable data unit) is 5 GB. Figure 4 shows the model
representing a potential execution path generated by
the Job Scheduler for the submitted job. The graph
model is a step-by-step representation of all the data
movements and data processing enforced to execute
the top level job. This execution path starts at the sites
(S
0
, S
2
) where data reside at job submission time and
involves the movement of a 5GB data from S
2
to S
3
and from S
0
to S
1
. Then, three Hadoop sub-jobs will
be executed at S
1
, S
2
and S
3
respectively. Finally the
global reducing of the data produced by the Hadoop
sub-jobs will be performed at S
3
.
Figure 4: Graph modeling a potential execution path.
In the example, the branch at the bottom models
the elaboration of data that initially reside in node
S
2
, are map-reduced by node S
2
itself, and are finally
pushed to node S
3
(the Global Reducer) through the
links L
A 2
and L
A 3
. In the graph, only the L
A 2
node
is represented as it is slower than L
A 3
and will im-
pose its speed in the overall path S
2
→ L
A 2
→ R
A
→
L
A 3
→ S
3
. Similarly in the middle branch the data
resides in node S
2
, are moved to node S
3
through the
link L
A
2
, and are map-reduced by node S
3
itself. In
the top-most branch the data residing in node S
0
are
moved to node S
1
through link L
A 0
(L
A 0
is slower
than L
A 1
), are map-reduced by node S
1
and are fi-
nally pushed to node S
3
through link L
A 3
(L
A 3
avail-
able bandwidth is less than L
A 1
bandwidth).
4.1 A Scalable Job Scheduling
Algorithm
The job scheduling algorithm’s task is to search for
an execution path which minimizes a given job’s ex-
ecution time. In our previous work (Cavallo et al.,
IoTBDS 2017 - 2nd International Conference on Internet of Things, Big Data and Security
96

2015) we proposed a job scheduling algorithm capa-
ble of generating all possible combinations of map-
pers and the related assigned data fragments by lever-
aging on the combinatorial theory. That approach’s
strategy was to explore the entire space of all poten-
tial execution paths and find the one providing the best
(minimum) execution time. Unfortunately the num-
ber of potential paths to visit may be very large, if we
consider that many sites may be involved in the com-
putation and that the data sets targeted by a job might
be fragmented at any level of granularity. Of course,
the time to seek for the best execution plan consider-
ably increases with the number of fragments and the
number of network’s sites. That time may turn into
an unacceptable overhead that would affect the per-
formance of the overall job. If on the one hand such
an approach guarantees for the optimal solution, on
the other one it is not scalable.
In order to get over the scalability problem, in
this work we propose a new approach that searches
for a good (not necessarily the best) job execution
plan which still is capable of providing an accept-
able execution time for the job. Let us consider the
whole job’s makespan divided into two phases: a pre-
processing phase, during which the job execution plan
is defined, and a processing phase, that is when the
real execution is enforced. The new approach aims
to keep the pre-processing phase as short as possible,
though it may cause a time stretch during the process-
ing phase. We will prove that, despite the time stretch
of the job’s execution, the overall job’s makespan will
benefit.
Well known and common optimization algorithms
follow an approach based on a heuristic search
paradigm known as the one-point iterative search.
One point search algorithms are relatively simple
in implementation, computationally inexpensive and
quite effective for large scale problems. In general,
a solution search starts by generating a random initial
solution and exploring the nearby area. The neighbor-
ing candidate can be accepted or rejected according to
a given acceptance condition, which is usually based
on an evaluation of a cost functions. If it is accepted,
then it serves as the current solution for the next iter-
ation and the search ends when no further improve-
ment is possible. Several methodologies have been
introduced in the literature for accepting candidates
with worse cost function scores. In many one-point
search algorithms, this mechanism is based on a so
called cooling schedule (CS) (Hajek, 1988). A weak
point of the cooling schedule is that its optimal form
is problem-dependent. Moreover, it is difficult to find
this optimal cooling schedule manually.
The job’s execution path generation and evalua-
tion, which represent our optimization problem, are
strictly dependent on the physical context where the
data to process are distributed. An optimization al-
gorithm based on the cooling schedule mechanism
would very likely not fit our purpose. Finding a con-
trol parameter that is good for any variation of the
physical context and in any scenario is not an easy
task; and if it is set up incorrectly, the optimization
algorithm fail shortening the search time. As this pa-
rameter is problem dependent, its fine-tuning would
always require preliminary experiments. Unfortu-
nately, such preliminary study can lead to additional
processing overhead. Based on these considerations,
we have discarded optimization algorithms which en-
vision a phase of cooling schedule.
The optimization algorithm we propose to use in
order to seek for a job execution plan is the Late Ac-
ceptance Hill Climbing (LAHC) (Burke and Bykov,
2008). The LAHC is an one-point iterative search al-
gorithm which starts from a randomly generated ini-
tial solution and, at each iteration, evaluates a new
candidate solution. The LAHC maintains a fixed-
length list of the previously computed values of the
cost function. The candidate solution’s cost is com-
pared with the last element of the list: if it is not
worse, it is accepted. After the acceptance procedure,
the cost of the current solution is added on top of the
list and the last element of the list is removed. This
method allows some worsening moves which may
prolong the search time but, at the same time, helps
avoiding local minima. The LAHC approach is sim-
ple, easy to implement and yet is an effective search
procedure. This algorithm depends on just the input
parameter L, representing the length of the list. It is
possible to make the processing time of LAHC inde-
pendent of the length of the list by eliminating the
shifting of the whole list at each iteration.
The search procedure carried out by the LAHC is
better detailed in reported in the Algorithm 1 listing.
The LAHC algorithm first generates an initial solu-
tion which consists of a random assignment of data
blocks to mappers. The resulting graph represents the
execution path. The evaluated cost for this execution
path is the current solution and it is added to the list.
At each iteration, the algorithm evaluates a new can-
didate (assignment of data blocks and mappers nodes)
and calculates the cost for the related execution path.
The candidate cost is compared with the last element
of the list and, if not worse, is accepted as the new
current solution and added on top of the list. This
procedure will continue until the reach of a stopping
condition. The last found solution will be chosen as
the execution path to enforce.
In the next section we compare the LAHC algo-
A LAHC-based Job Scheduling Strategy to Improve Big Data Processing in Geo-distributed Contexts
97
Algorithm 1: Late Acceptance Hill Climbing
algorithm applied to the problem of job execu-
tion time minimization.
Produce random job execution path (initial
solution) s
Calculate initial solution’s cost function C(s)
Specify the list length L
begin
for k ∈ {0..L − 1} do
C(k) ← C(s)
end
Assign the initial number of iteration I ← 0
repeat
Produce a new job execution path (new
candidate solution) s∗
Calculate its cost function C(s∗)
v ← I mod L
if C(s∗) ≤ C
v
then
accept candidate (s ← s∗)
end
else
reject candidate (s ← s)
end
Add cost value on top of the list
C
v
← C(s)
Increment the number of iteration
I ← I + 1
until a chosen stopping condition;
end
rithm with the scheduler’s algorithm based on a com-
binatorial approach. Objective of the comparison is
to prove that the newly introduced algorithm scales
better and is even capable of producing better perfor-
mance in terms of reduced job makespan.
5 EXPERIMENTS
In this section we report the result of a comparison test
we ran to measure the increase of performance that
the new job scheduling algorithm is able to provide
with respect to the combinatorial algorithm discussed
in (Cavallo et al., 2016b). Main objective of the test is
to study the scalability of the two algorithms. To this
purpose, we designed some configurations - that are
meant to represent different scenarios - by tuning up
the following parameters: the number of Sites popu-
lating the geographic context, the network topology
interconnecting the Sites and number of data blocks
distributed among the Sites.
The experiments were done by simulating the ex-
ecution of a job with given β
app
and T hroughput.
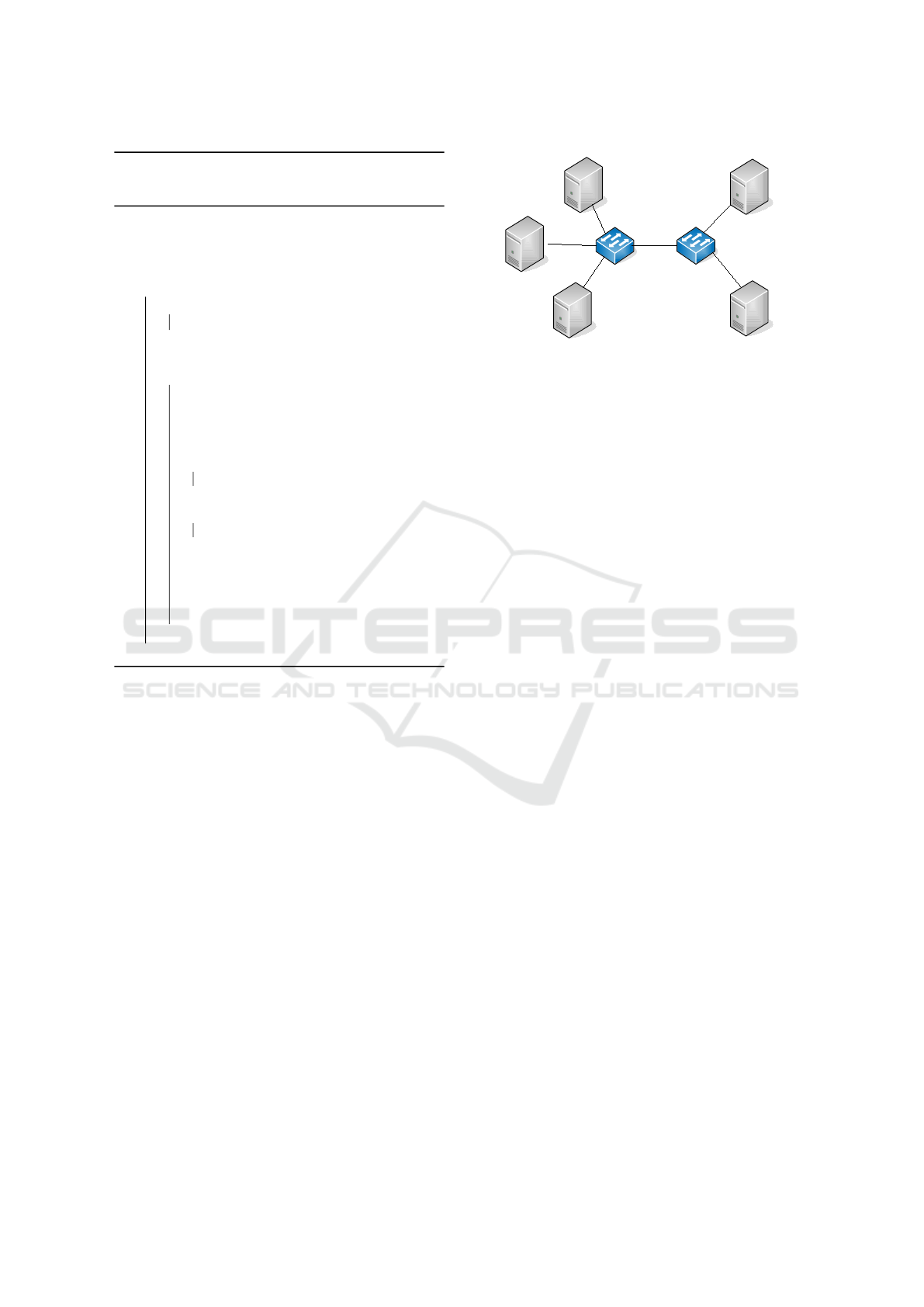
S
5
=20GFLOPS
R
22
R
11
L
1122
=10MB/s
L
113
=10MB/s
L
111
= 10MB/s
L
225
=10MB/s
L
224
= 10MB/s
L
112
=10MB/s
S
1
=20GFLOPS
S
2
=20GFLOPS
S
3
=20GFLOPS
S
4
=20GFLOPS
Figure 5: Network topology with 5 Sites.
Specifically, we considered a sample Job for which
a β
app
value of 0.5 was estimated. The results that we
show is an average evaluated over 10 runs per config-
uration.
In the considered scenarios, each node is equipped
with a 20 GFLOPS of computing power and each
network’s link has a 10 MB/s bandwidth. Further,
the size of every data block is set to 500MB. As for
the LAHC algorithm, we also ran several preliminary
tests in order to find a proper list’s size value. From
those tests, we observed that this parameter does not
have a substantial impact on the search of the execu-
tion path by the LAHC, neither it impairs the over-
all LAHC performance. For the test purpose, it was
arbitrarily set it to 100. Moreover, we set the stop-
ping condition for the LAHC to 10 seconds, meaning
that the algorithm stops its search after 10 seconds of
computation. This parameter’s value, again, comes
from preliminary tests that were run in order to figure
out what an acceptable stopping condition would be.
From those tests we observed that pushing that pa-
rameter to higher values did not bring any substantial
benefit in the search of the job execution path. Fi-
nally, the two scheduling algorithms were both run on
the same physical computing node, which is equipped
with an i7 CPU architecture and a 16 GB RAM.
A first battery of tests was run on a network topol-
ogy made up of five Sites interconnected to each
other’s in the way that is shown in Figure 5. From
this topology, five different configurations were de-
rived by considering the number of data blocks set to
5, 10, 20, 40 and 80 respectively. A second battery of
tests was then run for another network topology that
was obtained by just adding a new Site to the former
topology (the new Site was attached to switch R
22
just
in between S
5
and S
4
. That, of course, made things
more complicated since the number of combinations
of all possible job execution path increases. As for
this network topology, the same data block configura-
tions were considered. Unfortunately, we had to stop
the 80 data-block test as it took more than two days
IoTBDS 2017 - 2nd International Conference on Internet of Things, Big Data and Security
98
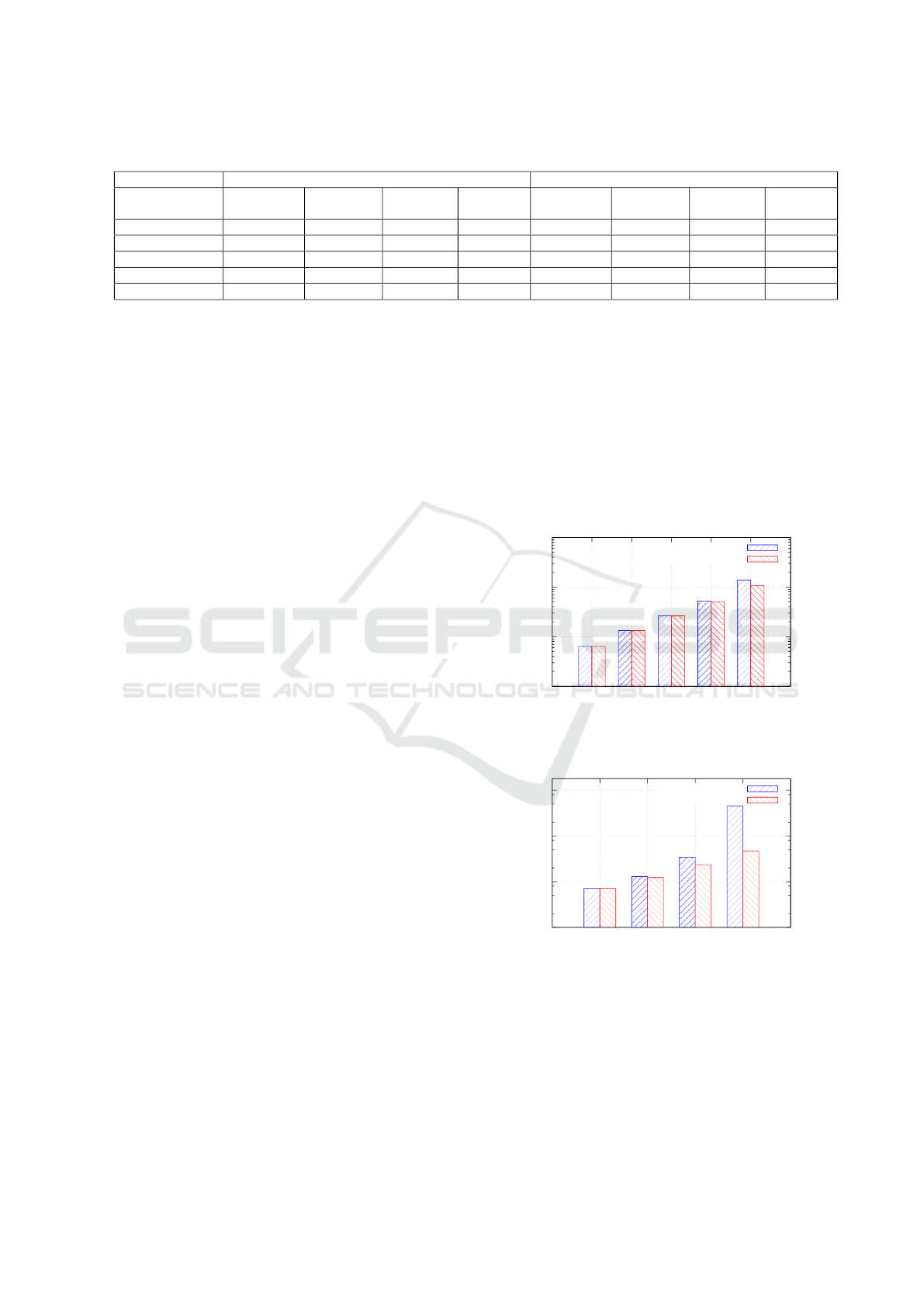
Table 1: KPIs measured in the 5-node network topology.
Combinatorial LAHC
# of DataBlocks
Scheduling
Time [sec]
Execution
Time [sec]
Makespan
[sec]
Overhead
[%]
Scheduling
Time [sec]
Execution
Time [sec]
Makespan
[sec]
Overhead
[%]
5 1.49 6375 6376 0.02 10.32 6375 6385 0.16
10 5.63 13250 13256 0.04 10.01 13250 13260 0.07
20 256.02 26250 26506.02 0.96 10.01 26250 26260 0.038
40 3215.42 49000 52215.42 6.15 10.01 49750 49760 0.020
80 42280 96750 139030 30.41 10.32 106500 106510 0.0097
for the combinatorial algorithm to run without even
finishing.
The KPI that is put under observation is the job
makespan. That KPI is further decomposed in two
sub-KPIs: the job scheduling time and the job exe-
cution time. Throughout the tests, the two sub-KPIs
were measured. Results of the first battery of tests are
shown in Table 1. In the table, for each algorithm, we
report the following measures: scheduling time, exe-
cution time, makespan (which is the sum of the pre-
vious two measures) and the overhead (the percent-
age of the scheduling time over the makespan). The
reader may notice that in the cases of 5 and 10 data
blocks respectively the combinatorial algorithm out-
performs the LAHC in terms of makespan. In those
cases, the LAHC managed to find the global optimum
(we remind that the combinatorial always finds the
optimum) but the LAHC overhead is higher than that
of the combinatorial (which is capable of finding the
solution in much less than 10 seconds). In the case of
20 data blocks, the LAHC is still able to find a global
optimum, so the performance of the two algorithm
terms of execution time are equal. But in this case
the combinatorial took more than 200 seconds to find
the solution, while the scheduling time for the LAHC
is always ten seconds long. So the LAHC slightly out-
performs the combinatorial in the makespan. Finally,
in the cases of 40 and 80 data blocks the LAHC finds
a just local optimum (the LAHC’s execution time is
lower than the combinatorial’s). In spite of that, being
the scheduling time of the combinatorial extremely
long, in the makespan comparison the LAHC once
more outperforms the combinatorial.
In Figure 6 we have reported the two execution
paths found by the two algorithms in the case of 40
data blocks. While the combinatorial’s is the best pos-
sible path and the LAHC’s is only a local optimum,
the two paths look very much alike. The only differ-
ence, which is highlighted in the red boxes, concerns
the computation of the data residing in Site S
3
. While
the LAHC schedules the computation of the data on
the Site S
3
itself, the combinatorial manages to bal-
ance to computation between Site S
3
and Site S
5
, thus
speeding up the overall execution time.
Results of the second battery of tests are shown
in Table 2. The reader will notice that in the new net-
work topology, which is a little more complex than the
previous one, the combinatorials has some scalabil-
ity issues even with a relatively simplex data config-
uration (for 10 data blocks, the scheduling time takes
more than 500 seconds. In the cases of 20 and 40
blocks respectively, the LAHC confirms to be the best
as it is capable of finding very good execution paths
(though not the best) in a very short scheduling time.
1000
10000
100000
1x10
6
5 10 20 40 80
Makespan [sec]
# of Data Blocks
Combinatorial
LAHC
Figure 7: Makespan in the 5-node network topology.
1000
10000
100000
1x10
6
5 10 20 40
Makespan [sec]
# of Data Blocks
Combinatorial
LAHC
Figure 8: Makespan in the 6-node network topology.
In Figures 7 and 8 we reported a graphical rep-
resentation of the makespan performance of the two
algorithms. In the graph, for the ease of representa-
tion, the values in y-axis are reported in a logarithmic
scale. The final consideration that we draw is that the
combinatorial algorithm is extremely poor in terms of
scalability. In fact, the performance will degrade sig-
A LAHC-based Job Scheduling Strategy to Improve Big Data Processing in Geo-distributed Contexts
99

(a)
(b)
Figure 6: Execution paths in the 5-node network topology and the 40 data-blocks configuration: a) combinatorial; b) LAHC.
Table 2: KPIs measured in the 6-node network topology.
Combinatorial LAHC
# of DataBlocks
Scheduling
Time [sec]
Execution
Time [sec]
Makespan
[sec]
Overhead
[%]
Scheduling
Time [sec]
Execution
Time [sec]
Makespan
[sec]
Overhead
[%]
5 1.87 7125 7126 0.03 10.36 7125 7135 0.14
10 594 12250 12844 4.62 10.13 12250 12260 0.083
20 10795.30 23500 34295.3 31.48 10.02 23500 23510 0.043
40 404980.31 44350 449330.31 90.13 10.10 47000 47010 0.021
nificantly as the number of data blocks grows. The
LAHC solution was proved to scale very well. De-
spite the solutions it finds are local optima, even for
very complex scenarios they are very close to the
global optima found by the combinatorial.
6 CONCLUSION
The gradual increase in the information daily pro-
duced by devices connected to the Internet, combined
with the enormous data stores found in traditional
databases, has led to the definition of the Big Data
concept. This work aims to make big data process-
IoTBDS 2017 - 2nd International Conference on Internet of Things, Big Data and Security
100

ing more efficient in geo-distributed computing envi-
ronments, i.e., environments where data to be com-
puted are scattered among data centers which are ge-
ographically distant. In this paper we describe a job
scheduling solution based on the Late Acceptance
Hill-Climbing (LAHC) algorithm, that allows to find
a sub-optimal job execution plan in a very limited
scheduling time. For our purposes, several scenarios
were designed that reproduce many geographical dis-
tributed computing contexts. We compared the per-
formance produced by the LAHC with that of a com-
binatorial algorithm we had proposed in a previous
paper. Results show that the LAHC scales very well
in very complex scenarios and always guarantees a
job makespan that is shorter than the one provided by
the combinatorial algorithm. Encouraged by these re-
sults, our future works will focus on ensuring a job
fair scheduling and an optimum exploitation of the
computing resources in multi-job scenarios.
REFERENCES
Burke, E. K. and Bykov, Y. (2008). A late acceptance strat-
egy in hill-climbing for examination timetabling prob-
lems. In Proceedings of the conference on the Practice
and Theory of Automated Timetabling(PATAT).
Cavallo, M., Cusm
`
a, L., Di Modica, G., Polito, C., and
Tomarchio, O. (2015). A Scheduling Strategy to Run
Hadoop Jobs on Geodistributed Data. In Advances in
Service-Oriented and Cloud Computing: Workshops
of ESOCC 2015, Taormina, Italy, September 15-17,
2015, Revised Selected Papers, volume 567 of CCIS,
pages 5–19. Springer.
Cavallo, M., Cusm
`
a, L., Di Modica, G., Polito, C., and
Tomarchio, O. (2016a). A Hadoop based Framework
to Process Geo-distributed Big Data. In Proceedings
of the 6th International Conference on Cloud Com-
puting and Services Science (CLOSER 2016), pages
178–185, Rome (Italy).
Cavallo, M., Di Modica, G., Polito, C., and Tomar-
chio, O. (2016b). Application Profiling in Hierarchi-
cal Hadoop for Geo-distributed Computing Environ-
ments. In IEEE Symposium on Computers and Com-
munications (ISCC 2016), Messina (Italy).
Hajek, B. (1988). Cooling schedules for optimal annealing.
Mathematics of Operations Research, 13(2):311–329.
Heintz, B., Chandra, A., Sitaraman, R., and Weissman, J.
(2014). End-to-end Optimization for Geo-Distributed
MapReduce. IEEE Transactions on Cloud Comput-
ing, 4(3):293–306.
Jayalath, C., Stephen, J., and Eugster, P. (2014). From
the Cloud to the Atmosphere: Running MapReduce
across Data Centers. IEEE Transactions on Comput-
ers, 63(1):74–87.
Kim, S., Won, J., Han, H., Eom, H., and Yeom, H. Y.
(2011). Improving Hadoop Performance in Intercloud
Environments. SIGMETRICS Perform. Eval. Rev.,
39(3):107–109.
Luo, Y., Guo, Z., Sun, Y., Plale, B., Qiu, J., and Li, W. W.
(2011). A Hierarchical Framework for Cross-domain
MapReduce Execution. In Proceedings of the Second
International Workshop on Emerging Computational
Methods for the Life Sciences, ECMLS ’11, pages 15–
22.
Mattess, M., Calheiros, R. N., and Buyya, R. (2013). Scal-
ing MapReduce Applications Across Hybrid Clouds
to Meet Soft Deadlines. In Proceedings of the 2013
IEEE 27th International Conference on Advanced In-
formation Networking and Applications, AINA ’13,
pages 629–636.
Miorandi, D., Sicari, S., Pellegrini, F. D., and Chlamtac, I.
(2012). Internet of things: Vision, applications and
research challenges. Ad Hoc Networks, 10(7):1497 –
1516.
Yang, H., Dasdan, A., Hsiao, R., and Parker, D. S. (2007).
Map-reduce-merge: Simplified relational data pro-
cessing on large clusters. In Proceedings of the 2007
ACM SIGMOD International Conference on Manage-
ment of Data, SIGMOD ’07, pages 1029–1040.
Zhang, Q., Liu, L., Lee, K., Zhou, Y., Singh, A.,
Mandagere, N., Gopisetty, S., and Alatorre, G. (2014).
Improving Hadoop Service Provisioning in a Geo-
graphically Distributed Cloud. In Cloud Computing
(CLOUD), 2014 IEEE 7th International Conference
on, pages 432–439.
A LAHC-based Job Scheduling Strategy to Improve Big Data Processing in Geo-distributed Contexts
101
