
Towards a Generic Autonomic Model to Manage Cloud Services
Jonathan Lejeune
1
, Frederico Alvares
2
and Thomas Ledoux
2
1
Sorbonne Universités-Inria-CNRS, Paris, France
2
IMT Atlantique, LS2N, Nantes, France
Keywords:
Cloud Computing, Cloud Modeling, Cloud Self-management, Constraint Programming, XaaS.
Abstract:
Autonomic Computing has recently contributed to the development of self-manageable Cloud services. It
provides means to free Cloud administrators of the burden of manually managing varying-demand services
while enforcing Service Level Agreements (SLAs). However, designing Autonomic Managers (AMs) that
take into account services’ runtime properties so as to provide SLA guarantees without the proper tooling
support may quickly become a non-trivial, fastidious and error-prone task as systems size grows. In fact,
in order to achieve well-tuned AMs, administrators need to take into consideration the specificities of each
managed service as well as its dependencies on underlying services (e.g., a Sofware-as-a-Service that depends
on a Platform/Infrastructure-as-a-Service). We advocate that Cloud services, regardless of the layer, may share
the same consumer/provider-based abstract model. From that model we can derive a unique and generic AM
that can be used to manage any XaaS service defined with that model. This paper proposes such an abstract
(although extensible) model along with a generic constraint-based AM that reasons on abstract concepts,
service dependencies as well as SLA constraints in order to find the optimal configuration for the modeled
XaaS. The genericity of our approach are showed and discussed through two motivating examples and a
qualitative experiment has been carried out in order to show the approache’s applicability as well as to point
out and discuss its limitations.
1 INTRODUCTION
The Cloud computing service provisioning model
allows for the allocation of resources in an on-
demand basis, i.e., consumers are able to request/re-
lease compute/storage/network resources, in a quasi-
instantaneous manner, in order to cope with varying
demands (Hogan and al., 2011). From the provider
perspective, a negative consequence of this service-
based model is that it may quickly lead the whole sys-
tem to a level of dynamicity that makes it difficult to
manage so as to enforce Service Level Agreements
(SLAs) by keeping Quality of Service (QoS) at ac-
ceptable levels.
Autonomic Computing (Kephart and Chess, 2003)
has been largely adopted to tackle that kind of dy-
namic environments. In fact, it proposes architecture
references and guidelines intended to conceive and
implement Autonomic Managers (AMs) that make
Cloud systems self-manageable, while freeing Cloud
administrators of the burden of manually managing
them.
In order to achieve well-tuned AMs, administra-
tors need to take into consideration specificities of
each managed service as well as its dependencies on
underlying systems and/or services. In other words,
AMs must be implemented taking into account sev-
eral managed services’ runtime properties so as to
meet SLA guarantees at runtime, which may require
sometimes a certain level of expertise on fields that
administrators are not always familiar to or supposed
to master (e.g., optimization, modeling, etc.). Further-
more, modeling autonomic behaviours without hav-
ing a holistic view of the system, its dependency as
well as the impacts incurred by reconfigurations could
lead it to inconsistent states. Therefore, conceiving
AMs from scratch or dealing with them at a low level,
and without the proper tooling support, may quickly
become a cumbersome and error-prone task, espe-
cially for large systems.
We advocate that Cloud services, regardless of the
layer in the Cloud service stack, share many common
characteristics and goals. Services can assume the
role of both consumer and provider in the Cloud ser-
vice stack, and the interactions among them are gov-
erned by SLAs. For example, an Infrastructure-as-a-
Service (IaaS) may provide Virtual Machines (VMs)
to its customers, which can be for instance Platform-
Lejeune, J., Alvares, F. and Ledoux, T.
Towards a Generic Autonomic Model to Manage Cloud Services.
DOI: 10.5220/0006302801750186
In Proceedings of the 7th International Conference on Cloud Computing and Services Science (CLOSER 2017), pages 147-158
ISBN: 978-989-758-243-1
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
147
as-a-Service (PaaS) or Software-as-a-Service (SaaS)
providers, or end-users, but it may also be a client of
Energy-as-a-Service (EaaS) providers. Similarly, the
SaaS provides software services to end-users, while
purchasing VM services provided by one or several
IaaS providers. In this sense, Anything-as-a-Service
(XaaS)’ objectives are very similar when generalizing
it to a Service-Oriented Architecture (SOA) model:
(i) finding an optimal balance between costs and rev-
enues, i.e., minimizing the costs due to other pur-
chased services and penalties due to SLA violation,
while maximizing revenues related to services pro-
vided to customers; (ii) meeting all SLA or internal
constraints (e.g., maximal capacity of resources) re-
lated to the concerned service. In other words, any
AM could be designed so as to find XaaS configura-
tions according to these objectives.
In this paper, we propose an abstract model
to describe autonomic Cloud systems at any XaaS
level. The model basically consists of graphs and
constraints formalizing the relationships between the
Cloud service providers and their consumers in a SOA
fashion and is encoded in a constraint programming
model (Rossi et al., 2006). From the latter, we can
automatically derive decision-making and planning
modules that are later on integrated into an AM. The
ultimate goal is to provide the means for administra-
tors to easily define XaaS systems so they can focus
on the core functionalities of each service while leav-
ing the autonomic engineering, namely the decision-
making and planning, to be performed by the generic
AM.
The major advantage of our approach is that it is
generic. In fact, Cloud administrators are able to de-
fine their own XaaS models by extending/specializ-
ing the abstract model. Even so the extended XaaS
model can still benefit from the constraint program-
ming model in a transparent way. That is to say,
the generic AM and the underlying constraint solver
reason on abstract concepts, service dependencies as
well as SLA or internal constraints so as to find the
appropriate XaaS configurations at a given time.
We evaluate our approach in terms of genericity
and applicability. The genericity is showed and dis-
cussed throughout two motivating examples illustrat-
ing an IaaS and a SaaS self-managed systems as well
as their respective customers and providers. Regard-
ing the applicability, we provide a qualitative evalu-
ation by showing the behaviour of the IaaS system
over the time, i.e., how its state autonomously evolves
in response to a series of simulated events occurring
not only at the customers (e.g., requesting/releasing
resources) and providers (e.g., changes in the price
of offered services, new services available, etc.) sides
Autonomic Manager
XaaS
Administrator
DAG-based
model
reasons on
Executor
Physical
XaaS
XaaS
Model
(e.g., IaaS)
is represented by
API
Defines
Initializes and
Modifies
Monitoring
Analyse
Plan
Execute
Knowledge
Running
XaaS
Instance
Translates changes
into Concrete Actions
Monitors, Metrics,
Healthstate,etc.
Sensors
Service
Model
Conforms to
Extends
Monitor
Pushes Changes
(update attribute
values, enable/disable nodes)
Observes
Changes
Source Configuration
Target Configuration
ObservesObserves
Meta-model
Model
InstantiationReal World
Link/unlink nodes,
enable/disable nodes,
update attribute values
Analysis
(Constraint Solver)
Planner
(Match/Diff)
Figure 1: Approach Overview.
but also inside itself (e.g., a crash on a given resource).
In the remainder of this paper, Section 2 gives
an overview of the proposed approach. Section 3
presents a detailed and formal description of the ab-
stract model. Examples of an IaaS and a SaaS model
definitions are shown in Section 4. Section 5 shows
the results on the qualitative evaluation performed on
a IaaS model under the proposed generic autonomic
manager. Related work is discussed in Section 6 and
Section 7 concludes this paper.
2 ABSTRACT MODEL
OVERVIEW
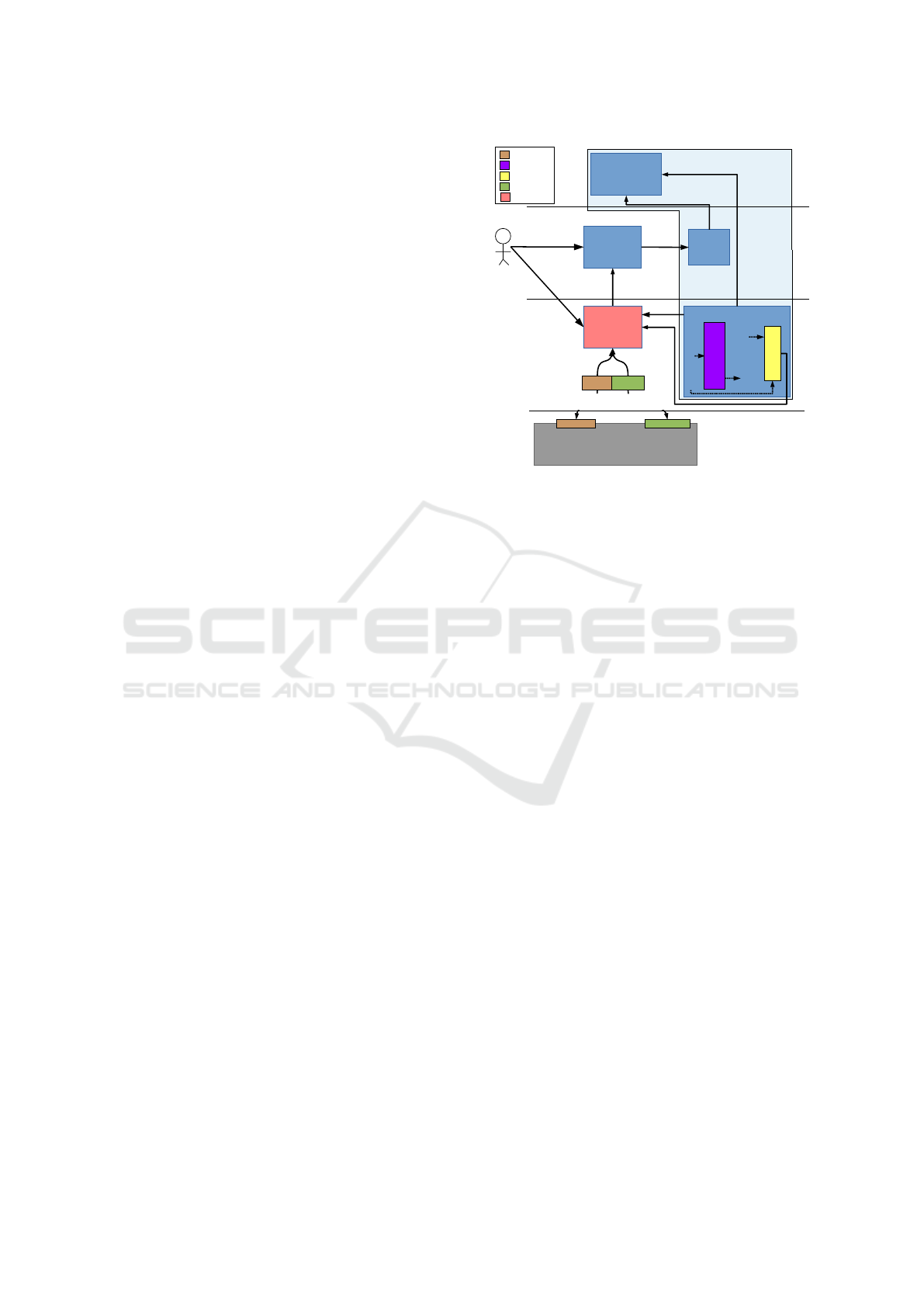
Our approach is based on a meta-model (Schmidt,
2006) allowing Cloud administrators to model any
XaaS layer and on a MAPE-K loop providing auto-
nomic features (Kephart and Chess, 2003). The rest
of this section gives an overview of each modeling
level of our approach as well as the generic AM, as
depicted in Figure 1.
2.1 The Meta-model Level
We propose an abstract and generic model in which
XaaS layers are architecturally composed of compo-
nents and each component depends on other compo-
nent in order to function. Thus, that can be modeled
as a directed acyclic graph (DAG), where nodes rep-
resent atomic components of the system and arrows
represent dependencies between the components. In
other words, it exists an arc from a component A to
a component B if and only if A depends on B. In the
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
148

following, the words node and component are inter-
changeable.
Each node may have several attributes defining its
internal state and several constraints, which can be ei-
ther Link Constraints or Attribute Constraints. The
former specifies whether a component A may (or has
to) use (or be used by) another component B, whereas
the latter expresses a value depending on the value of
other attributes located on the same node or on neigh-
bor nodes.
2.2 The Model Level
The above mentioned meta-model provides a set of
high-level DAG-based linguistic concepts allowing
for the definition of components, attributes, depen-
dencies among components and constraints on both
attributes and dependencies. It is straightforward that
the main advantage of relying on a DAG-based model
is that it allows, if necessary, for checking properties
such as connectivity or locality. At that level, how-
ever, the concepts remain quite far from the Cloud
Computing domain, which makes it difficult to de-
scribe Cloud services equipped with autonomic capa-
bilities.
We define a set of new linguistic concepts that
allow the definition of a Cloud service in terms of
relationships between service providers and service
consumers, while taking into account the SLAs estab-
lished in each relationship. The core of the service
is modeled as a set of internal components that of-
fer a set of services to service clients and may de-
pend on a set of other services provided by service
providers. In summary, we rely on the DAG-based
meta-model to define a Service Model that introduces
new SOA-related concepts while restraining the types
of nodes, attributes and connections to be used. Thus,
the Service Model is general enough to allow for the
definition of any XaaS service and specific enough to
simplify (by specialization) the task of the Adminis-
trator in defining specific XaaS models. For instance,
an IaaS can be composed of a set of internal com-
ponents (e.g., VMs with the attribute ram_capacity)
that depend on a set of other internal components
(e.g., PMs with the attribute max_nb_vm) or on a ser-
vice provider (e.g., Energy Provider with the attribute
power_capacity), that is, any service required by the
service being modeled.
2.3 The Runtime Level
Once the Administrator has defined its XaaS model,
he/she has to initialize the running instances, that
is, the representation of the Physical XaaS entities
(e.g., the real PMs) as well as their respective con-
straints in terms of dependencies, SLAs, attributes
(e.g., CPU/RAM capacity). For instance, a running
IaaS instance can be composed of a set of instances
of the VM node with their initialization values (e.g.,
ram_capacity=8GB). This task is tremendously sim-
plified by the adoption of a Model@run-time ap-
proach (Blair et al., 2009): the running XaaS instance
represents the physical system and is linked in such a
way that it constantly mirror the system and its current
state and behavior; if the system changes, the repre-
sentations of the system – the model – should also
change, and vice versa.
A XaaS configuration is a snapshot of all running
components, including the state of their current de-
pendencies and their internal state. The configura-
tion can then be modified by three actors: the XaaS
Administrator, the Monitor and the AM. The XaaS
Administrator modifies the configuration whenever
he/she initializes the XaaS service by providing an
initial configuration or for maintenance purposes.
The Monitor along with the Executor are respon-
sible for keeping a causal link between the XaaS in-
stance and the Physical XaaS. Hence, the Monitor
modifies the configuration every time it detects that
the state of the real Physical XaaS has changed by
pushing the changes to the XaaS Instance. On the
other way around, the Executor pushes the changes
observed on the XaaS instance to the real system by
translating them to concrete actions specific to the
managed system.
The generic AM’s role is to ensure that the current
XaaS configuration: (i) respects the specified con-
straints; (ii) maximizes the balance between costs and
revenues specified in SLA contracts. To that end, it
observes regularly the running XaaS instance in both
periodically or event-based basis (when severe events
happen such as a SLA violation, a node that is no
longer available, etc.) and triggers a constraint solver
by taking as input the current configuration and pro-
duces as output a new configuration that is more suit-
able to the current Physical XaaS state. The Planner
component produces a plan based on the difference
between the current and new configurations in terms
of components, attribute values and links, resulting in
a set of reconfiguration actions (e.g., enable/disable,
link/unlink and update attribute value) that have to be
executed on the running XaaS instance. Lastly, Ex-
ecutor component pushes these actions to the Physi-
cal XaaS.
Towards a Generic Autonomic Model to Manage Cloud Services
149
3 FORMAL DESCRIPTION
This section formally describes the DAG-based ab-
stract model that is used to define the SOA-based
model, from which a XaaS model can be extended.
3.1 Configurations and Transitions
Let T be the set of instants t representing the execu-
tion time of the system where t
0
is the instant of the
first configuration. The XaaS configuration at instant
t is denoted by c
t
and includes all running nodes (e.g.,
PMs/VMs, Software Components, Databases, etc.),
organized in a DAG. CST R
c
t
denotes the set of con-
straints of configuration c
t
.
The property satis f y(cstr,t) is verified at t if and
only if the constraint cstr ∈ CST R
c
t
is met at instant t.
The system is consistent (consistent(c
t
)), at instant t,
if and only if ∀cstr ∈ CST R
c
t
satis f y(cstr,t). Finally,
function H (c
t
) gives the score of configuration c at
instant t, meaning that the higher this value, the better
the configuration is (e.g., in terms of balance between
costs and revenues).
We discretize the time T by the application of a
transition function f on c
t
such that c
t+1
= f (c
t
). A
configuration transition can be triggered in two ways
by:
• an internal event (e.g., the XaaS administrator ini-
tializes a component, PM failure) or an external
event (e.g., a new client arrival) altering the sys-
tem configuration (cf. function event in Figure 2);
• the autonomic manager that performs the func-
tion control. This function ensures that
consistent(c
t+1
) is verified, while maximizing
H (c
t+1
)
1
and minimizing the transition cost
2
to
change the system state between c
t
and c
t+1
.
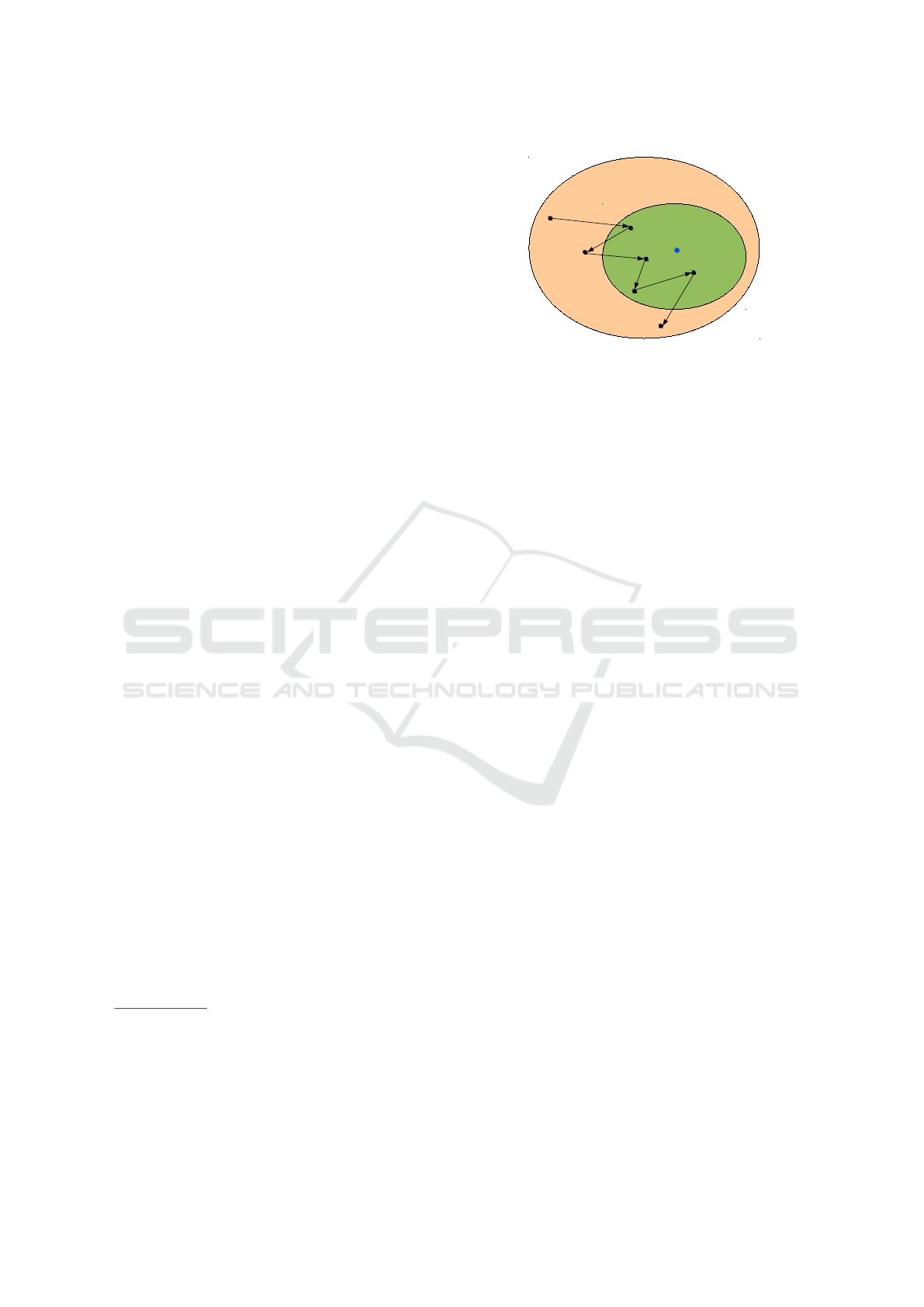
Figure 2 illustrates a transition graph among sev-
eral configurations. It shows that an event func-
tion potentially moves away the current configura-
tion from the optimal configuration and that a control
function tries to get closer the optimal configuration
while respecting all the system constraints.
3.2 Nodes and Attributes
Let n
t
be a node at instant t. It is characterized by:
1
Since the research of optimal configuration (a config-
uration where the function H () has the maximum possible
value) may be too costly in terms of execution time, we
assume that the execution time of the control function is
limited by a bound set by the administrator.
2
Assuming that an approximate cost value for each re-
configuration action type is a priori known
Optimal
Configuration
Consistent Configurations
(all constraints are met)
Conf
0
Conf
1
Conf
2
Conf
3
Conf
4
Conf
5
Conf
6
Control
Event
Control
Control
Event
Event
Set of all possible system configurations
Figure 2: Examples of configuration transition in the set of
configurations.
• a node identifier (id
n
∈ ID
t
), where ID
t
is the set
of existing node identifiers at t and id
n
is unique
∀t ∈ T ;
• a type (type
n
∈ TY PES)
• a set of predecessors (preds
n
t
∈ P (ID
t
)) and suc-
cessors (succs
n
t
∈ P (ID
t
)) nodes in the DAG.
Note that ∀n
t
a
,n
t
b
∈c
t
, id
n
t
b
6= id
n
t
a
∃id
n
t
b
∈ succs
n
t
a
⇔ ∃id
n
t
a
∈ preds
n
t
b
• a set of constraints CST R
n
t
about links with neig-
borhood.
• a set of attributes (atts
n
t
) defining the node’s in-
ternal state.
An attribute att
t
∈ atts
n
t
at instant t is defined by:
a name name
att
, which is constant ∀t ∈ T , a value de-
noted val
att
t
∈ R ∪ID
t
(i.e., an attribute value is either
a real value or a node identifier); and a set of con-
straints CST R
att
t
about its value (which may depends
on local or remote attributes).
3.3 Service Model
XaaS services can assume the role of consumer or
provider, and the interactions between them are gov-
erned by SLAs. According to these characteristics,
we define our Service Model with the following node
types where relationships between each one are illus-
trated and summarized in the Figure 3.
3.3.1 Root Types
We introduce two types of root nodes: the
RootProvider and the RootClient. In any configura-
tion, it exists exactly only one node instance of each
root type respectively denoted n
RP
and n
RC
. These
two nodes do not represent a real component of the
system but they can be seen rather as theoretical
nodes. The n
RP
(resp. n
RC
) node has no sucessor
(resp. predecessor) and is considered as the only sink
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
150
SLA
Client
totalCost
SLA
Client
totalCost
Root
Client
SysRev
Service
Client
Service
Client
Service
Client
Service
Client
SLA
Provider
totalCost
Root
Provider
SysExp
SLA
Provider
totalCost
Service
Provider
Service
Provider
Service
Provider
SLA
Provider
totalCost
Internal
Component
Internal
Component
Internal
Component
Internal
Component
Internal
Component
Internal
Component
Internal
Component
Internal
Component
Internal
Component
Provided services
Services bought
from other XaaS
Internal components
Figure 3: Example of a consistent configuration.
(resp. source) node in the DAG. The n
RP
(resp. n
RC
)
node represents the set of all the providers (resp. the
consumers) of the managed system. This allows to
group all features of both provider and consumer lay-
ers, especially the costs due to operational expenses
of services bought from all the providers (represented
by attribute SysExp in n
RP
) and revenues thanks to
services sold to all the consumers (represented by at-
tribute SysRev in n
RC
).
3.3.2 SLA Types
The relationship between the managed system and an-
other system is modelled by a component represent-
ing a SLA. Consequently, we define in our model the
SLAClient (resp. SLAProvider) type corresponding
to a link between the modeled XaaS and one of its
customer (resp. provider). A SLA defines the prices
of each service level that can be provided and the
amount of penalties for violations. Thus, a SLA com-
ponent has different attributes representing the dif-
ferent prices, penalties and then the current cost or
revenue (attribute total_cost) induced by current set
of bought services (cf. service type below) associ-
ated with it. A SLAClient (resp. SLAProvider) has
a unique predecessor (resp. successor) which is the
RootClient (resp. RootProvider). Consequently, the
attributes SysRev (resp. SysExp) is equal to the sum
of all attribute total_cost of its successors (resp. pre-
decessors).
3.3.3 Service Types
A SLA defines several Service Level Objectives
(SLO) for each provided service (Kouki and Ledoux,
2012). Consequently, we have to model a service as a
component. Each service provided to a client (resp.
received from a provider) is represented by a node
of type ServiceClient (resp. ServiceProvider). The
different SLOs are modeled as attributes in the cor-
responding service component (e.g., configuration re-
quirements, availability, response time, etc.). Since
each Service is linked with a unique SLA component,
we define for the service type an attribute designating
the SLA node which the service is related to. For the
ServiceClient (resp. ServiceProvider) type, this at-
tribute is denoted by sla_client (resp. sla_prov) and
its value is a node ID, which means that the node has
a unique predecessor (resp. successor) corresponding
to the SLA.
3.3.4 Internal Components Types
InternalComponent represents any kind of com-
ponent of the XaaS layer that we want to man-
age with the AM. A node of this type may be
used by another InternalComponent node or by a
ServiceClient node. Conversely, it may require an-
other InternalComponent node or a ServiceProvider
node to work.
3.4 Autonomic Manager and
Constraints Solver
In the AM, the Analysis task is achieved by
a constraint solver. A Constraint Programming
Model (Rossi et al., 2006) needs three elements to
find a solution: a static set of problem variables, a
domain function, which associates to each variable its
domain, and a set of constraints. In our model, the
configuration graph can be considered as a compos-
ite variable defined in a domain. For the constraint
solver, the decision to add a new node in the config-
uration is impossible as it implies the adding of new
variables to the constraint model during the evalua-
tion. We have hence to define a set N
t
corresponding
to an upper bound of the node set c
t
, i.e., c
t
⊆ N
t
.
More precisely, N
t
is the set of all existing nodes at
instant t. Every node n
t
/∈ c
t
is considered as deacti-
vated and does not take part in the running system at
instant t.
Each existing node has consequently a boolean at-
tribute called activation attribute. Thanks to this at-
tribute the analyzer can decide whether a node has
to be enabled (true value) or disabled (false value),
Towards a Generic Autonomic Model to Manage Cloud Services
151

which corresponds respectively to a node adding/re-
moving in the configuration.
The property enable(n
t
) verifies if and only if n
is activated at t. This property has an incidence over
the two neighbor sets preds
n
t
and succs
n
t
. Indeed,
when enable(n
t
) is false n
t
has no neighbor because
n does not depend on other node and no node may
depend on n. The set N
t
can only be changed by the
Administrator or by the Monitor when it detects for
instance a node failure, meaning that a node will be
removed in N
t+1
.
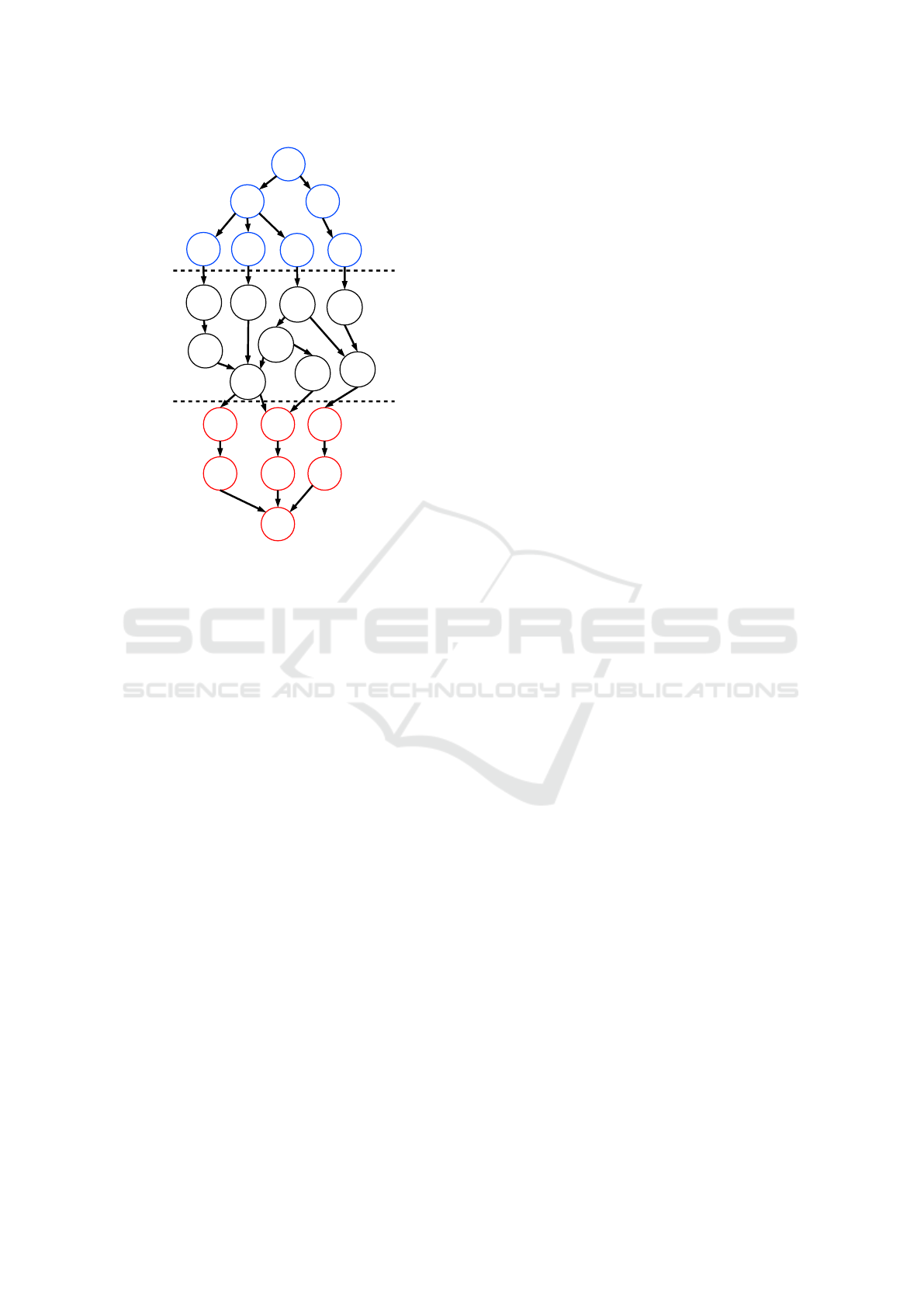
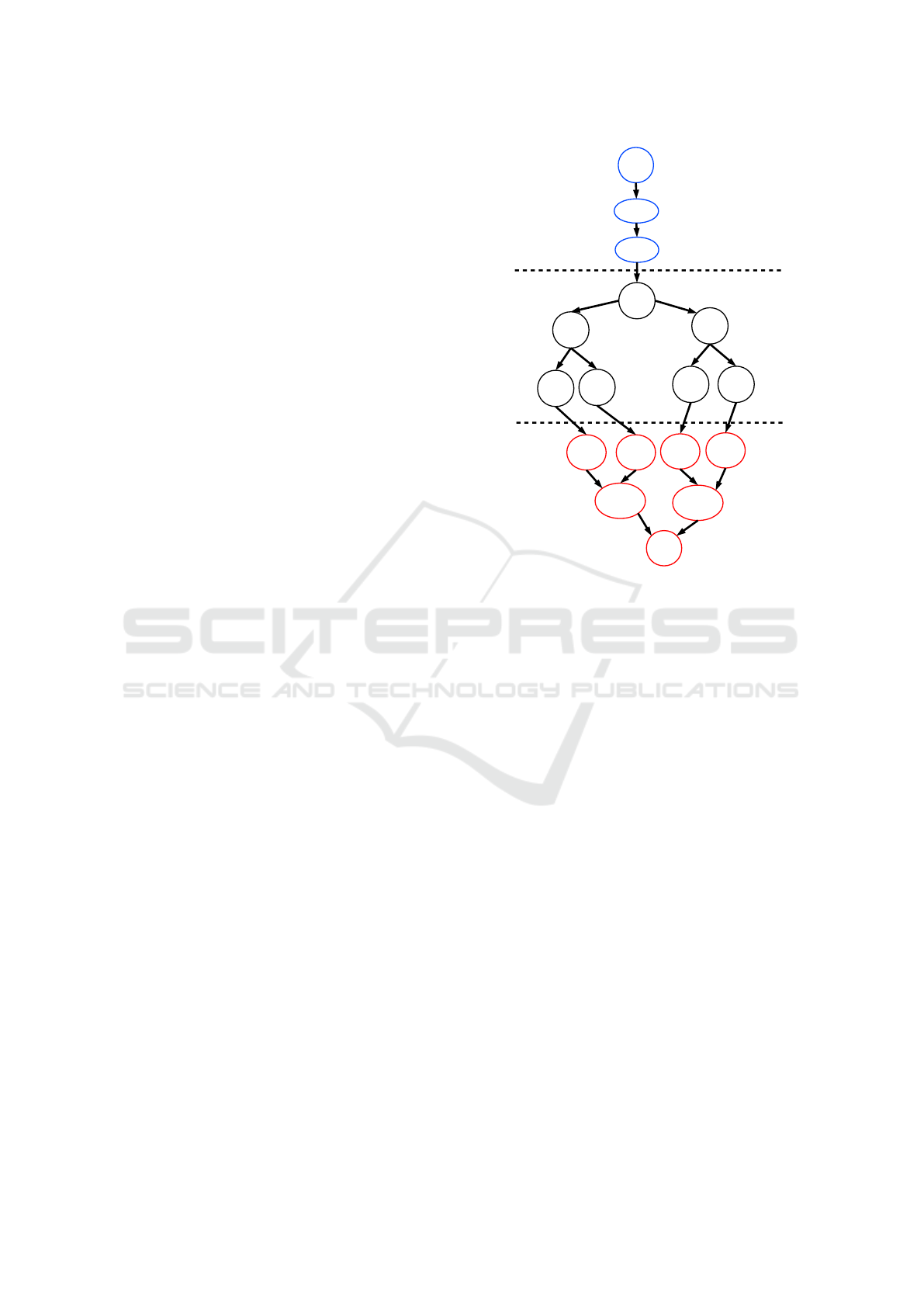
Figure 4 depicts an example of two configuration
transitions. At instant t, there is a node set N
t
=
{n
1
,n
2
,...,n
8
} and c
t
= {n
1
,n
2
,n
5
,n
6
,n
7
}. The next
configuration at t + 1, the Monitor agent detects that
component n
2
has failed, leading the managed system
to an inconsistent configuration. At t + 2, the control
function detects the need to activate a disabled node
in order to replace n
2
by n
4
. This scenario matches
the configuration transitions from con f
1
to con f
3
in
Figure 2.
n
1
n
2
n
7
n
5
n
6
n
8
n
4
n
3
(a) Node set at t
n
1
n
7
n
5
n
6
n
8
n
4
n
3
(b) Node set at
t + 1
n
1
n
7
n
5
n
6
n
8
n
4
n
3
(c) Node set at
t + 2
Figure 4: Examples of configuration transition.
3.5 Configuration Constraints
The graph representing the managed XaaS has to
meet the following constraints:
1. any deactivated node n
t
a
at t ∈ T has no neighbor:
n
t
a
does not depend on other nodes and there is not
a node n
t
b
that depends on n
t
a
. Formally,
¬enable(n
t
a
) ⇒
succs
n
t
a
=
/
0 ∧ preds
n
t
a
=
/
0
2. except for root nodes, any activated node has at
least one predecessor and one successor. For-
mally,
enable(n
t
a
) ⇒
| succs
n
t
a
|> 0 ∧ | preds
n
t
a
|> 0
3. if a node n
t
i
a
is enabled at instant t
i
, then all the
constraints associated with n
a
(link and attribute
constraints) will be met in a finite time. Formally,
enable(n
t
i
) ⇒ ∃t
j
≥ t
i
,∀cstr ∈ CST R
n
t
i
a
∧cstr ∈ CST R
n
t
j
a
∧ enable(n
t
j
) ∧ satis f y(cstr,t
j
)
4. the function H () is equal to the balance between
the revenues and the expenses of the system.
SLA
VM1
SLA
VM2
Root
Client
VM
Service1
VM
Service2
Root
Provider
SLA
Power
Power
Service
PM1
Cluster1
PM2
VM1 VM2
VM3
VM
Service3
req_cpu = 4
req_ram!= 16
sla_client =
SLAClientVM1
TotalCost = 77
price_per_cpu= 4
price_per_ram = 0.5
req_cpu = 8
sla_client = 32
SLAClientVM1
req_cpu = 4
req_ram = 16
sla_client =
SLAClientVM2
TotalCost = 20
price_per_cpu = 3
price_per_ram!= 0.5
SysRev = 97
nbCPU=4
nbRAM=16
used_cpu = 12
used_ram = 58
nb_cpu = 16
nb_ram = 64
cluster = cluster1
used_cpu = 4
used_ram = 16
nb_cpu = 8
nb_ram = 32
cluster = cluster1
power_consuption_per_pm= 10
current_consumption= 20
consumption_max = 50
current_consumption = 20
sla_prov = SLAPower1
price_per_unit = 3
TotalCost = 60
SysExp= 60
nbCPU=8
nbRAM=32
nbCPU=4
nbRAM=16
Provided services
Services bought
from other XaaS
Internal components
Figure 5: Example of a IaaS configuration.
Formally, H (c
t
) = att
t
rev
− att
t
exp
where att
t
rev
∈
atts
n
t
RC
∧ att
t
rev
= SysRev and where att
t
exp
∈
atts
n
t
RP
∧ att
t
exp
= SysExp
4 IMPLEMENTATION
EXAMPLES
The models presented in the previous sections rely on
abstract provider/consumer relationships as well as on
SLA constraints to describe any autonomic XaaS ser-
vice. This section aims at showing the genericity of
those models by applying them to two different XaaS:
an IaaS and a SaaS. Figure 5 (resp. Figure 6) gives an
example of a configuration at a given instant. Each en-
abled node is represented with its own attributes and
their corresponding values.
4.1 Example of an IaaS Description
4.1.1 Provided Services
For sake of simplicity, we consider that such system
provides a unique service to their customers: com-
pute resource in the form of VMs. Hence, there exists
a node type V MService extending the ServiceClient
type defined in the abstract model. This node type is
responsible for bridging the IaaS and its customers.
A customer can specify the required number of CPUs
and RAM as attributes of V MService node. The
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
152
prices for a unit of CPU/RAM are defined inside
the SLA component, that is, inside the SLAVM node
type, which extends the SLAClient type of the abstract
model. It should be noticed that prices may differ ac-
cording to the customer.
4.1.2 Internal Components
VMs are hosted on PMs which are themselves
grouped into Clusters. We define thus three node
types extending the InternalComponent type:
• the type V M represents a virtual machine and it
has an attribute defining the current number of
CPUs/RAM. Each enabled V M has exactly a suc-
cessor node of type PM and exactly a unique
predecessor of type V MService. The main con-
straint of a V M node is to have the number of
CPUs/RAM equal to attribute specified in its pre-
decessor V MService node.
• the type PM represents a physical machine with
several attributes such as the total number of
CPUs/RAM, the number of allocated CPUs/RAM
on V M and the node representing the cluster host-
ing the PM. The latter attribute allows to express a
constraint that specifies the physical link between
the PM and its cluster. The predecessors of a PM
are the V Ms currently hosted by it.
• the type Cluster represents a component hosting
several PMs. It has an attribute representing the
current power consumption of all hosted PMs.
This attribute is computed according to the power
consumption of each running PM, i.e., the number
of predecessors.
4.1.3 Services Bought from Other Providers
The different clusters of the modeled IaaS system
need electrical power in order to operate. That power
is also offered in the form of service (Energy-as-
a-Service, i.e., electricity), by an energy provider.
We define the PowerService type by extending the
ServiceProvider type of the abstract model, and it
corresponds to an electricity meter. A PowerService
node has an attribute that represents the maximum
capacity in terms of kilowatt-hour, which bounds
the sum of the current consumption of all Cluster
nodes linked to this node (PowerService). Finally,
the SLAPower type extends the SLAProvider type and
represents a signed SLA with an energy provider by
defining the price of a kilowatt-hour.
SLA
WebApp
Root
Client
WebApp
Service
Root
Provider
SLA
VmProvider1
Vm
Service1
Provided services
Services bought
from other XaaS
Internal components
Tier
App
rt = 476
sla_client = SLAWebApp
TotalCost = 74
max_rt = 550
SysRev = 74
rt = 142
w = 247
cpu_cap = 1
ram_cap = 4
sla_prov =
SLAVmProvider1
price_per_cpu_unit = 3
price_per_ram_unit = 1
TotalCost = 14
SysExp= 42
Tier
DB
App
Worker1
App
Worker2
alloc_cpu = 1
alloc_ram/= 4
DB
Worker1
DB
Worker2
Vm
Service2
Vm
Service3
Vm
Service4
alloc_cpu = 1
alloc_ram/= 4
alloc_cpu = 2
alloc_ram/=16
alloc_cpu = 2
alloc_ram/= 16
SLA
VmProvider2
rt = 334
w = 247
App
rt = 476
price_per_cpu_unit = 3
price_per_ram_unit = 0.5
TotalCost = 28
cpu_cap = 2
ram_cap = 16
sla_prov =
SLAVmProvider2
Figure 6: Example of a SaaS configuration.
4.2 Example of a SaaS Description
4.2.1 Provided Services
Also for the sake of simplicity and readability, we
model a SaaS system so it provides a single Web
Application service to its customers. It means, that
there is a node type WebAppService extending Ser-
viceClient. This node has two attributes correspond-
ing to the current response time of the provided ser-
vice and the node that defines SLA which the ser-
vice provider and the client signed for. Customers
can specify the maximum required response time in
each corresponding SLAWebApp node, which extend
the SLAClient type from the abstract model. The ser-
vice price is defined as a utility function of the over-
all response time, that is to say that the price charged
to customers is inversely proportional to the response
time (in this case max_rt − rt) and is also defined
within node SLAWebApp. It should be noticed that
prices may vary according to the client, i.e., accord-
ing to the way SLAWebApp is defined for each client.
4.2.2 Internal Components
The web application is architecturally structured in
tiers, and each tier is composed of workers that can be
activated or deactivated to cope with workload varia-
Towards a Generic Autonomic Model to Manage Cloud Services
153

tions while minimizing costs. That way, we define
three InternalComponent nodes:
• the type App represents the web application itself
and it has an attribute that defines current applica-
tion overall response time. There is a constraint
in App stating that the value of the response time
is equal to the value of the response time of node
WebAppService. Each App has two or more suc-
cessor nodes of type Tier (in this case TierApp
and TierDB). The App response time is calculated
based on the sum of the response times of all its
successors.
• the type Tier has also one or several successors of
type Worker and two attributes: the income work-
load, which can be given as input to the model
(i.e., monitored from the running system); and
the tier response time, which is calculated based
on the workload attribute and the amount of re-
sources allocated to each worker associated to
the concerned Tier. More precisely, we define
the response time as a function of the amount of
CPU and RAM currently allocated to the succes-
sor Worker nodes.
• the type Worker represents a replicated compo-
nent of a given tier (e.g., application, database,
etc.). It has three attributes corresponding to the
currently allocated CPU and RAM; and specify-
ing precisely which tier the worker belongs to so
as to avoid the constraint solver to link a worker
to a different tier (e.g., AppWorker1 to TierDB).
4.2.3 Services Bought from Other providers
Each worker depends on compute/storage resources
that are offered in terms of VMs by a VM provider.
We define the node VmService by extending the Ser-
viceProvider type of the abstract model. It corre-
sponds to a VM offered by an IaaS provider. This
node type consists of two attributes representing the
CPU and RAM capacities and one attribute precis-
ing to which SLA Provider the service is associated
to. Finally, the SLAVmProvider node extends the
SLAProvider type from the abstract model and it cor-
responds to the signed SLA with the IaaS provider.
This SLA specifies the price per unit of compute re-
sources bought/rented (in terms of VM) by the SaaS.
5 PERFORMANCE EVALUATION
In this section, we present an experimental study of
an implementation of our generic AM for an IaaS sys-
tem modeled as the one depicted in the Figure 5. The
main objective of our study is to analyse qualitatively
the impact of the AM behaviour on the system con-
figuration when a given series of events occur and the
analysis time of the constraint solver to take a deci-
sion.
5.1 Experimental Testbed
We implemented the Analysis component of the AM
by using the Java-based constraint solver Choco
(Prud’homme et al., 2014). The experimentation sim-
ulates the interaction with the real world, i.e., the role
of the components Monitor and Executor depicted in
Figure 1. This simulation has been conducted on a
single processor machine with an Intel Core i5-6200U
CPU (2.30GHz) and 6GB of RAM Memory running
Linux 4.4.
We rely on the XML language to specify the ini-
tial configuration of our IaaS system. The snapshot
of the running IaaS system configuration (the initial
as well as the ones associated to each instant t ∈ T )
is stored in a file. At each simulated event, this file
was modified to apply consequences of the event over
the configuration. After each modification due to an
event, we activated the AM to propagate the modifica-
tion on the whole system and to ensure that the config-
uration meets all the imposed constraints. By trying
to maximize the system balance between costs and
revenues and to minimize the reconfiguration time,
the AM produces a reconfiguration plan and gener-
ates then a new configuration file.
The simulated IaaS system is composed of 3
clusters physical homogeneous machines (PM). Each
physical machine has 32 processors and 64 GB of
RAM memory. The system has two power providers:
a classical power provider, that is, brown energy
power provider and a green energy power provider.
The current consumption of a turned on PM is the sum
of its idle power consumption (40 power units) when
no guest VM is hosted with an additional consump-
tion due to allocated resources (1 power unit per CPU
and per RAM allocated). In order to avoid to degrade
analysis performance by considering too much physi-
cal resources compared to the number of consummed
virtual resources, we limit the number of unused PM
nodes in the graph while ensuring a sufficient amount
of available physical resources to host a potential new
VM.
In the experiments, we considered four types of
event:
• AddV MService: a customer requests for a new
V MService. The required configuration of this re-
quest (i.e., the number of CPUs and RAM units)
is chosen independently, with a random uniform
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
154
law. The number of required CPU ranges from
1 to 8, and the number of required RAM units
ranges from 1 to 16 GB. The direct consequences
of such an event is the addition of a V MService
node and a VM node in the configuration file. The
aim of the AM after this event is to enable the new
VM and to find the best PM to host it.
• leavingClient: a customer decides to cancel
definitively the SLA. Consequently, the corre-
sponding SLAVM, V MService and VM nodes are
removed from the configuration. After a such an
event the aim of the AM is potentially to shut
down the concerned PM or to migrate other VMs
to this PM in order to minimize the revenue loss.
• GreenAvailable: the Green Power Provider de-
creases significantly the price of the power unit
to a value below the price of the Brown Energy
Provider. The consequence of that event is the
modification of the price attribute of the green
SLAPower node. The expected behaviour of the
AM is to enable the green SLAPower node in or-
der to consume a cheaper service.
• CrashOnePM: a PM crashes. The consequence
on the configuration is the suppression of the cor-
responding PM node. The goal of the AM is to
potentially turn on a new PM and to migrate VM
which was hosted by the broken PM.
In our experiments, we consider the following
scenario. Initially, the configuration at t
0
, no VM
is requested and the system is turned off. At
the beginning, the unit price of the green power
provider is considerably higher than the price of
the other provider (70 against 5). The system has
four clients which requests VM services. The num-
ber of requested services per client is not neces-
sary equal. The unit selling price is 50 for a CPU
and 10 for a RAM unit. We first consider a se-
quence of several AddV MService events until hav-
ing around 40 V MService nodes. Then, we trigger
a leavingClient event, a GreenAvailable event and fi-
nally a CrashOnePM event.
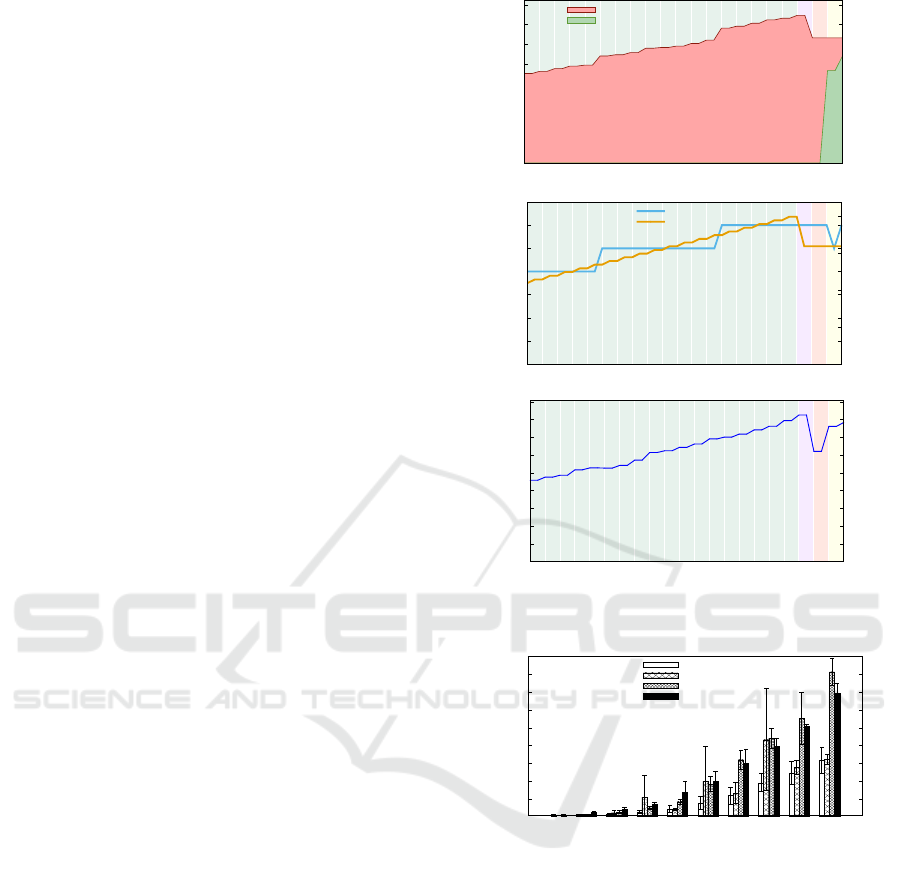
We shows the impact of this scenario over the fol-
lowing metrics: the amount of power consumption for
each Power Provider in the Figure 7(a); the amount of
enabled PMs and V MService in the Figure 7(b); and
the configuration balance (function H ()) in the Figure
7(c). The x-axis in Figures 7(a), 7(b) and 7(c), repre-
sents the logical time of the experiment in terms of
configuration transition. Each colored area in this fig-
ure includes two configuration transitions: the event
immediately followed by the control action. The color
differs according to the type of the fired event. For
sake of readability, the x-axis does not begin at the
0
100
200
300
400
500
600
700
800
Energy Consumption (W)
Brown
Green
(a) Power consumption.
0
1
2
3
4
5
6
7
0
10
20
30
40
Number of PMs Turned On
Number of VMService Nodes
#PMs On
#VmService Nodes
(b) Required VMs and turned on PMs.
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
AddVMService1
AddVMService2
AddVMService3
AddVMService4
AddVMService5
AddVMService6
AddVMService7
AddVMService8
AddVMService9
AddVMService10
AddVMService11
AddVMService12
AddVMService13
AddVMService14
AddVMService15
AddVMService16
AddVMService17
AddVMService18
leavingClient
GreenAvailable
CrashOnePM
System Balance (function H)
(c) System balance.
10
20
30
40
50
60
70
80
90
0_to_99
100_to_199
200_to_299
300_to_399
400_to_499
500_to_599
600_to_699
700_to_799
800_to_899
900_to_999
Constraint solving process (in s)
Total number of nodes
AddVM
leavingClient
GreenAvail
CrashPM
(d) Time to take a decision by the solver
Figure 7: Experimental results of the simulation.
initiation instant but when the number of V MService
reaches 20. In figure 7(d), we show the time of the
Choco Solver to take a decision according to the num-
ber of nodes in the graph. Actually, while the experi-
ment of figures 7(a), 7(b) and 7(c) considers a size of
0 to 99 nodes, we replay the same scenario of events
described above until reaching around 1000 nodes.
5.2 Analysis and Discussion
As expected, when the amount of requests of
V MService increases in a regular basis (Figure 7(b)),
the system power consumption increases (Figure 7(a))
Towards a Generic Autonomic Model to Manage Cloud Services
155

sufficiently slowly so that the system balance also in-
creases (Figure 7(c)). This can be explained by the
ability of the AM to decide to turn on a new PM in a
just-in-time way, that is, the AM tries to allocate the
new coming VMs on existing enabled PM. Indeed,
we can see at the fifth AddV MService event that start-
ing a new PM can be costly (especially when the new
VM is small in terms of resources), since the balance
does not increase after this event, which would be the
expected outcome after selling new services (VMs in
this case).
On the other way around, when a client leaves the
system, as expected, the number of V MService nodes
decreases (from 40 to 32). In spite of that, the power
consumption also decreases from 748 to 634 (around
15%) due to the amount of resources which are not
used anymore, the decrease from 8260 to 6210 of the
system balance is not proportional (around 24 %). In
fact, we can see that the number of PMs is constant
during this event and consequently, the power con-
sumption is higher than at the previous instant, where
the number of V MService nodes is the same (at the
tenth AddV MService event). Consequently, we can
deduce that the AM has decided in this case to privi-
lege the reconfiguration cost criteria at the expense of
the system balance criteria: the cost in terms of plan-
ning actions (in our case VM migrations) leading to
the configuration at the tenth AddW MService event is
too costly compared to the cost due to system balance
loss.
When the GreenAvailable event occurs, we can
observe the activation of the Green Energy Provider
(cf. Figure 7(a)) and, as expected, an increase of the
system balance. This shows that the AM is capable
of adapting the choice of provided service according
to their current price. Thus, the modeled XaaS can
benefit from sales promotions offered by its providers.
Finally, when a PM (CrashOnePM event), we can
see that the AM starts a new PM to replace the old
one. Moreover, in order to optimize the system bal-
ance (Figure 7(c)), the new PM is started on a cluster
that uses the green energy, i.e., the current cheapest
energy.
In figure 7(d), we can see that the decision time
globally increases with the system size while keep-
ing the same order of magnitude. However, it is
not regular according to the event type showing that
the impact of each event is very variable. Indeed,
the AddW MService event concerns the adding of a
unique VM on a PM which explains the fact that
it is the fastest processed event, contrary to the
CrashOnePM event which concerns a cluster, several
PMs and VMs to migrate leading to a decision on a
larger scale. Moreover we can see a huge variance es-
pecially for the leavingClient event. This shows that
its impact over the system reconfiguration is unpre-
dictable. Indeed, it depends on several factors like
the number of concerned VM and their locality on the
PMs, leading thus to make sometimes costly consol-
idation operations. In spite of that, as shown in Fig-
ure 7(d), our constraint model is capable of managing
systems with reasonable sizes (e.g., 1000 nodes), with
acceptable solving time.
6 RELATED WORK
Model-driven Approach and Cloud Management.
Recent work have proposed the use a Model-
driven Engineering for engineering the Cloud ser-
vices. Some for reusing existing deployment pro-
cedures (Mastelic et al., 2014), other for optimizing
VM configuration (Dougherty et al., 2012) or man-
aging multi-cloud applications (e.g., migrate some
VMs from a IaaS to another that offers better perfor-
mance) (Ardagna and al., 2012). These approaches
typically focus on supporting either IaaS or PaaS con-
figuration, but do not address SaaS layer nor cross-
layer modelisation. StratusML provides a model-
ing framework and domain specific modeling lan-
guage for cloud applications dealing with different
layers to address the various cloud stakeholders con-
cerns (Hamdaqa and Tahvildari, 2015). The OASIS
TOSCA specification aims at enhancing the portabil-
ity of cloud applications by defining a modeling lan-
guage to describe the topology across heterogeneous
clouds along with the processes for their orchestra-
tion (Brogi and Soldani, 2016). However, those ap-
proaches do not deal with autonomic management.
Recently, OCCI (Open Cloud Computing Inter-
face) has become one of the first standards in Cloud.
The kernel of OCCI is a generic resource-oriented
metamodel (Nyrén et al., 2011), which lacks a rig-
orous and formal specification as well as the con-
cept of (re)configuration. To tackle these issues, the
authors of (Merle et al., 2015) specify the OCCI
Core Model with the Eclipse Modeling Framework
(EMF)
3
, whereas its static semantics is rigorously de-
fined with the Object Constraint Language (OCL)
4
. A
EMF-based OCCI model can ease the description of
a XaaS, which is enriched with OCL constraints and
thus verified by a many MDE tools. The approach,
however, does not cope with autonomic decisions that
have to be done in order to meet those OCL invariants.
Another body of work propose ontologies (Dast-
jerdi et al., 2010) or a model-driven approach based
3
https://eclipse.org/modeling/emf
4
http://www.omg.org/spec/OCL
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
156

on Feature Models (FMs) (Quinton et al., 2013)
to handle cloud variability and then manage and
create Cloud configurations. These approaches fill
the gap between application requirements and cloud
providers configurations but, unlike our approach,
they focus on the initial configuration (at deploy-
time), not on the run-time (re)configuration. In
(García-Galán et al., 2014), the authors rely on FMs
to define the space of configurations along with user
preferences and game theory as decision-making tool.
While the work focuses on features that are selected in
a multi-tenant context, our approach provides support
for ensuring the selection of SLA-compliant config-
urations in a cross-layer manner, i.e., by considering
the relationships between providers and consumers in
a single model.
Generic Autonomic Manager. In (Mohamed et al.,
2015), the authors extend OCCI in order to support
autonomic management for Cloud resources, describ-
ing the needed elements to make a given Cloud re-
source autonomic regardless of the service level. This
extension allows autonomic provisioning of Cloud re-
sources, driven by elasticity strategies based on im-
perative Event–Condition–Action rules. These rules
require expertise at each service level and is error-
prone as the number of rules grows. In contrast, our
generic autonomic manager is based on a declarative
approach of consumer/provider relationships and –
thanks to a constraint solver – it is capable of con-
trolling the target XaaS system so as to keep it close
to the optimal configuration.
In (Ferry et al., 2014), the authors propose a sup-
port for management of multi-cloud applications for
enacting the provisioning, deployment and adaptation
of these applications. Their solution is based on a
models@run-time (Blair et al., 2009) engine which is
very close to our autonomic manager (with a reason-
ing in a cloud provider-agnostic way and a diff be-
tween the current and the target configuration). How-
ever, the authors focus on the IaaS or PaaS levels, but
do not address SaaS, nor the relationships between
layers.
Relationships between Cloud layers are addressed
in (Marquezan et al., 2014) where the authors propose
a conceptual model to represent the entities and rela-
tionships inside the cloud environment that are related
to adaptation. They identify relationships among the
cloud entities and dependencies among adaptation ac-
tions. However, their proposal is only an early work
without a formal representation neither implementa-
tion.
In (Kounev et al., 2016), the authors pro-
pose a generic control loop to fit the requirements
of their model-based adaptation approach based
on an architecture-level modeling language (named
Descartes) for quality-of-service and resource man-
agement. Their solution is very generic and do not
focus specifically on cross-layers SLA contracts.
SLA-based Resource Provisioning and Constraint
Solver. Several approaches on SLA-based resource
provisioning – and based on constraint solvers – have
been proposed. Like in our approach, the authors of
(Hermenier et al., 2009) rely on the Choco solver,
but their focus remains on the IaaS infrastructure,
and more precisely on VM migration. In (Ghanbari
et al., 2012), the authors propose a new approach to
autoscaling that utilizes a stochastic model predictive
control technique to facilitate resource allocation and
releases meeting the SLO of the application provider
while minimizing their cost. They use also a convex
optimization solver for cost functions but no detail is
provided about its implementation. Besides, the ap-
proach addresses only the relationship between SaaS
and IaaS layers, while in our approach any XaaS ser-
vice can be defined.
7 CONCLUSION AND FUTURE
WORK
This paper presented a generic and abstract service-
based model that unifies the main characteristics and
objectives of Cloud services: finding an optimal
balance between costs and revenues while meeting
constraints regarding the established Service Level
Agreements and the service itself. This model en-
abled us to derive a unique and generic Autonomic
Manager (AM) capable of managing any Cloud ser-
vice, regardless of the layer. From the Cloud Admin-
istrators point of view, this is an interesting contri-
bution, not only because frees them from the difficult
task of conceiving and implementing purpose-specific
AMs, but also because the proposed model, although
generic and abstract, is extensible. The generic AM
relies on a constraint solver that reasons on very ab-
stract concepts (e.g., nodes, relations, constraints) to
perform the analysis phase in a MAPE-K loop. We
showed the genericity of the abstract model by illus-
trating two possible implementations: a IaaS and a
SaaS systems. The IaaS implementation was evalu-
ated experimentally, with a qualitative study and the
results show that the AM is able to adapt the con-
figuration accordingly by taking into account the es-
tablished SLAs and the reconfiguration costs. Fur-
ther, results show that although generic, the AM can
Towards a Generic Autonomic Model to Manage Cloud Services
157

capture the specificities and runtime properties of the
modeled Cloud service.
As an on-going work, we are currently improving
the constraint resolution model so we can have bet-
ter performance in terms of decision-making. Also,
we are implementing a real IaaS AM on top of Open-
Stack
5
and evaluating it
6
. For future work, we plan
to tackle issues related to the coordination of many
inter-related AMs, which may cause problems of con-
flicting actions and other synchronization issues that
come with (Alvares de Oliveira et al., 2012). Fi-
nally, we plan also to provide full Domain Specific-
Language (DSLs) (van Deursen et al., 2000) and tool-
ing support allowing Administrators for a clearer, eas-
ier and more expressive description of XaaS models.
REFERENCES
Alvares de Oliveira, F., Sharrock, R., and Ledoux, T.
(2012). Synchronization of multiple autonomic con-
trol loops: Application to cloud computing. In
Proceedings of the 14th Int. Conf. on Coordination
Models and Languages (Coordination), pages 29–43.
Springer-Verlag.
Ardagna, D. and al. (2012). Modaclouds: A model-driven
approach for the design and execution of applications
on multiple clouds. In 4th Int. Workshop on Modeling
in Software Engineering, pages 50–56.
Blair, G., Bencomo, N., and France, R. B. (2009). Models@
run.time. Computer, 42(10):22–27.
Brogi, A. and Soldani, J. (2016). Finding available services
in tosca-compliant clouds. Science of Computer Pro-
gramming, 115–116:177 – 198.
Dastjerdi, A., Tabatabaei, S., and Buyya, R. (2010). An ef-
fective architecture for automated appliance manage-
ment system applying ontology-based cloud discov-
ery. In CCGrid 2010, pages 104–112.
Dougherty, B., White, J., and Schmidt, D. C. (2012).
Model-driven auto-scaling of green cloud computing
infrastructure. FGCS, 28(2):371–378.
Ferry, N., Song, H., Rossini, A., Chauvel, F., and Solberg,
A. (2014). Cloudmf: Applying mde to tame the com-
plexity of managing multi-cloud applications. In UCC
2014, pages 269–277.
García-Galán, J., Pasquale, L., Trinidad, P., and Ruiz-
Cortés, A. (2014). User-centric adaptation of multi-
tenant services: Preference-based analysis for ser-
vice reconfiguration. In SEAMS 2014, SEAMS 2014,
pages 65–74, New York, NY, USA. ACM.
Ghanbari, H., Simmons, B., Litoiu, M., Barna, C., and Is-
zlai, G. (2012). Optimal autoscaling in a iaas cloud.
In ICAC 2012, pages 173–178. ACM.
5
https://www.openstack.org/
6
https://www.grid5000.fr/
Hamdaqa, M. and Tahvildari, L. (2015). Stratus ml: A lay-
ered cloud modeling framework. In 2015 IEEE In-
ternational Conference on Cloud Engineering, pages
96–105.
Hermenier, F., Lorca, X., Menaud, J.-M., Muller, G., and
Lawall, J. (2009). Entropy: A consolidation manager
for clusters. In VEE 2009, pages 41–50.
Hogan, M. and al. (2011). Nist cloud computing standards
roadmap, version 1.0.
Kephart, J. and Chess, D. (2003). The vision of autonomic
computing. Computer, 36(1):41–50.
Kouki, Y. and Ledoux, T. (2012). Csla: a language
for improving cloud sla management. In Int. Conf.
on Cloud Computing and Services Science, CLOSER
2012, pages 586–591.
Kounev, S., Huber, N., Brosig, F., and Zhu, X. (2016). A
model-based approach to designing self-aware it sys-
tems and infrastructures. Computer, 49(7):53–61.
Marquezan, C. C., Wessling, F., Metzger, A., Pohl, K.,
Woods, C., and Wallbom, K. (2014). Towards exploit-
ing the full adaptation potential of cloud applications.
In PESOS 2014, pages 48–57.
Mastelic, T., Brandic, I., and Garcia Garcia, A. (2014).
Towards uniform management of cloud services by
applying model-driven development. In COMPSAC
2014, pages 129–138.
Merle, P., Barais, O., Parpaillon, J., Plouzeau, N., and Tata,
S. (2015). A precise metamodel for open cloud com-
puting interface. In CLOUD 2015, pages 852–859.
Mohamed, M., Amziani, M., Belaïd, D., Tata, S., and Mel-
liti, T. (2015). An autonomic approach to manage
elasticity of business processes in the cloud. FGCS,
50:49 – 61.
Nyrén, R., Edmonds, A., Papaspyrou, A., and Metsch, T.
(2011). Open cloud computing interface - core, spec-
ification document. Technical report, Open Grid Fo-
rum, OCCI-WG.
Prud’homme, C., Fages, J.-G., and Lorca, X. (2014).
Choco3 Documentation. TASC, INRIA Rennes,
LINA CNRS UMR 6241, COSLING S.A.S.
Quinton, C., Haderer, N., Rouvoy, R., and Duchien, L.
(2013). Towards multi-cloud configurations using
feature models and ontologies. In Int. Workshop
on Multi-cloud Applications and Federated Clouds,
pages 21–26.
Rossi, F., van Beek, P., and Walsh, T., editors (2006). Hand-
book of Constraint Programming. Elsevier Science
Inc., New York, NY, USA.
Schmidt, D. C. (2006). Guest editor’s introduction: Model-
driven engineering. Computer, 39(2):0025–31.
van Deursen, A., Klint, P., and Visser, J. (2000). Domain-
specific languages: an annotated bibliography. SIG-
PLAN Not., 35:26–36.
CLOSER 2017 - 7th International Conference on Cloud Computing and Services Science
158
