
Parallel-machine Scheduling with Precedence Constraints and
Controllable Job-processing Times
Kailiang Xu
1
, Rong Fei
2
and Gang Zheng
1
1
School of Automation and Information Engineering, Xi’an University of Technology, Xi’an, Shaanxi, China
2
School of Computer Science Engineering, Xi’an University of Technology, Xi’an, Shaanxi, China
{klxu, annyfei, zhenggang}@xaut.edu.cn
Keywords:
Parallel-machine, Precedence Constraint, Controllable Processing Time, Tabu-search.
Abstract:
A parallel-machine scheduling problem with tree-formed precedence constraints is studied, where job-
processing times can be compressed by allocating extra resource to the jobs. A tabu-search algorithm is
developed in this paper, which searches for the near optimal solutions based on the structural characteristics
of the problem. Experiment shows the algorithm is capable for providing satisfactory schedules for media and
large-sized problems within acceptable computing time.
1 INTRODUCTION
This paper concerns on a parallel-machine schedul-
ing problem with tree-formed precedence constraints,
where job-processing times can be compressed by the
consumption of extra resources, such as gas, fuel,
electricity power, cash and labors. Vickson(Vickson,
1980) was one of the first researchers to consider the
scheduling problems with controllable job-processing
times. Motivated by his research work, a number
of researchers focused their attention on scheduling
problems with controllable job-processing times after
1980, and have achieved significant result (for exam-
ple, Cheng et al.(Cheng et al., 2006), Janiak(Janiak,
1991), Shabtay and Kaspi(Shabtay and Kaspi, 2004;
Shabtay and Kaspi, 2006), etc.). An excellent sur-
vey on this field has been given by Shabtay(Shabtay,
2007). Reader may refer to it for more information.
Alidaee and Ahmadian(Alidaee and Ahmadian,
1993) were the first to consider parallel machine sys-
tem with controllable job-processing times. They
considered two unrelated-machine problems. The
first problem has an objective that equals total pro-
cessing cost plus total flow time, and the second
problem has an objective that equals total process-
ing cost plus total weighted earliness and weighted
tardiness. Under the assumption that all the jobs
have the same linear compression rate, the problem
is reduced to a transportation problem and is solved
in O(n
3
m + n
2
mlog(nm)) time. Jansen and Mas-
trolilli(Jansen and Mastrolilli, 2004) successfully ap-
plied approximation schemes on several identical ma-
chine problems related with maximum completion
time and total processing cost, including problem
P
m
|lin,C
max
≤ K|
∑
n
j=1
v
j
u
j
, P
m
|lin,
∑
n
j=1
v
j
u
j
≤
U |C
max
and P
m
|lin|C
max
+
∑
n
j=1
v
j
u
j
. Shabtay and
Kaspi(Shabtay and Kaspi, 2006) studied parallel ma-
chine scheduling problems under the situation where
operationsare modeled by non-linear convex resource
consumption functions. They showed that the general
problem P
m
|conv|C
max
is N P-hard, and obtained
several polynomial time algorithms for special cases.
The special case that preemption is allowed is also
studied by several researchers. For example, Jansen
and Mastrolilli(Jansen and Mastrolilli, 2004) showed
that problem P
m
|lin, pmtn,C
max
≤ K |
∑
n
j=1
v
j
u
j
can
be solved in O(n) time. Nowicki and Zdrza-
lka(Nowicki, 1995) provided an O(nmax{m, logn})
time greedy algorithm to solve the uniform machine
problem Q
m
|lin, a
j
= 1, pmtn,C
max
≤ K |
∑
n
j=1
v
j
u
j
problem.
Parallel machine scheduling with precedence con-
straints is widely studied in the context of the classi-
cal scheduling problems, but is not in literature under
the condition that job-processing times are control-
lable. In this paper, we consider a parallel machine
scheduling problem with precedence constraints and
controllable job-processing times: Schedule a set of
non-preemptive jobs J = {1, 2, . . . , n} that have tree-
formed precedence constraints on m identical ma-
chines. Job-processing times p
j
are controllable, and
can be modeled as the function of a continuously di-
vidable resource u
j
via a linear resource consumption
470
Xu, K., Fei, R. and Zheng, G.
Parallel-machine Scheduling with Precedence Constraints and Controllable Job-processing Times.
DOI: 10.5220/0006290804700476
In Proceedings of the 6th International Conference on Operations Research and Enterprise Systems (ICORES 2017), pages 470-476
ISBN: 978-989-758-218-9
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

function,
p
j
(u
j
) = ¯p
j
− θ
j
u
j
0 ≤ a
j
≤ p
j
(u
j
) ≤ b
j
≤ ¯p
j
(1)
where ¯p
j
is the non-compressed job-processing
time and θ
j
is the positive compression rate
of job j. The objective is to determine the
optimal schedule S = {σ
1
, σ
2
, . . . , σ
m
, p}, where
σ
i
= {σ
i
(1), σ
i
(2), . . . , σ
i
(n
i
)} is the optimal job-
processing sequence on machine i, and p =
{p
1
, p
2
, . . . , p
n
} is the optimal job-processing times,
such that the makespan of the jobs (C
max
=
max
n
j=1
C
j
) will not exceed the required deadline K,
and the total resource consumption U =
∑
n
j=1
u
j
is
minimized. Using the three-field problem classifica-
tion introduced by Graham et al.(Graham et al., 1979)
and extended by Shabtay and Steiner(Shabtay, 2007),
our problem can be denoted as P
m
|lin, tree,C
max
≤
K|
∑
n
j=1
u
j
.
The problem is strongly N P -hard, which can be
observed by the fact that it is still strongly N P -
hard to find a schedule whose makespan does not ex-
ceed deadline K when all the job-processing times are
compressed to their lower bound a
j
. Unless P = N P ,
it is impossible to find the optimal solution within ac-
ceptable computing time for large-scaled problems.
Therefore, in this paper we designed a tabu-search al-
gorithm to provide optimal or near optimal solutions
for large-scaled problems.
Tabu-search(Glover, 1990) is essentially a meta-
heuristic method that guides a heuristic local search
procedure to explore the solution space beyond
local optimality. A large number of successful
tabu-search algorithms for scheduling problems can
be found in literature (see, e.g., Dell’Amico and
Trubian(Dell’Amico and Trubian, 1991), Bilge et
al.(Bilge, 2004), Venditti et al.(Venidtti et al., 2010)
and Xu et al.(Xu, 2010)).
2 TABU-SEARCH ALGORITHM
The scheduling algorithm needs to optimize job-
processing sequence on the machines, as well as
the processing times of the jobs. Suppose a job-
processing sequence on the machines is decided, the
optimal job-processing times can be calculated by the
network flow method (NFM for convenience) intro-
duced by Fulkerson(Fulkerson, 1961). Therefore, the
tabu-search algorithm mainly concerns on searching
for the optimal or near optimal job-processing se-
quences on the machines. In the following part of this
section, the detail of the tabu-search algorithm will be
discussed, which includes the initial solution gener-
ation, the neighborhood generation, the tabu mecha-
nism, and the searching procedure.
2.1 The Objective Function
As the algorithm tries to minimize the resource con-
sumption of the jobs, schedules are evaluated by their
total resource consumption U. Therefore, the total
resource consumption U is selected as the objective
function in the tabu-search algorithm.
2.2 The Initial Solution
In this paper, the initial solution is constructed by the
LTAP (Largest Total Amount Processing time first)
method in the following way:
Algorithm 1: The LTAP method for initial solution
generation.
1. Have all the job-processing times compressed to
their lower bound a
j
;
2. Sort jobs by their total amount of processing time,
which is calculated by accumulating the process-
ing time of jobs’ successors and their own;
3. Assign jobs in the list to the machines. Each time,
assign the first job in the list according to the fol-
lowing rules:
(a) If there are one or more machines, where the last
processed job is one of the direct predecessors
of the job to be assigned, then assign it to the
latest ready machine among them;
(b) Otherwise, assign the job to the earliest ready
machine.
4. Calculate the optimal processing times of the jobs
by NFM.
Since parallel machine scheduling is N P -hard,
it shall be noted that the heuristic algorithm cannot
guarantee a feasible initial solution when the dead-
line is very tight. However, as job-processing times
are fully compressed, this method is still acceptable
in most practical environment.
2.3 Neighborhood Generation
In each iteration, a number of generated neighbor-
ing schedules need be evaluated, which is time-
consuming since objective values are calculated by
solving the optimal resource allocation problem.
Therefore, it is necessary to reduce neighboring
schedules that need be evaluated. Tabu-search follows
a so called ”aggressive search” principle, that is, the
Parallel-machine Scheduling with Precedence Constraints and Controllable Job-processing Times
471
best schedule in the neighborhood will always be se-
lected unless it is tabued. Therefore, if an operation
leads to a neighboring schedule that is no better than
another one, the operation need not be performed. If
such dominated schedules can be identified by some
simple rules before they are generated and evaluated,
much computing time will be saved. In the following
part, rules for ”promising” neighboring schedules will
be discussed based on the structural characteristic of
the schedules and operations.
Neighboring schedules are normally generated by
insert moves and swap moves. In this paper, insert
moves are solely studied in neighborhood generation,
which put single jobs to other processing positions ei-
ther on their current machine or on other machines.
As sequence constraint must be obeyed, it is supposed
that jobs are always moved to feasible processing po-
sitions, such that they will not be processed earlier
than their predecessors, or later than successors.
For parallel-machine problems with precedence
constraints, critical path method (CPM) calculates
the makespan of the jobs(Pinedo, 2012). By this
method, jobs are classified as critical jobs and slack
jobs. Critical jobs make up critical paths that de-
cide the makespan, while slack jobs have no influ-
ence to the makespan. Moreover, it can be observed
that p
j
= b
j
for every slack job j. Therefore, when a
slack job is moved to another processing position, the
makespan will keep unchanged, if not be increased,
which causes the total resource consumption not be
reduced. The following lemma states this:
Lemma 1. Suppose job j is a slack job, then inserting
job j to any other processing position cannot reduce
the total resource consumption.
Therefore, insert moves are performed only on
critical jobs.
Apart from this, other structural characteristics of
the problem also help to reduce neighboring sched-
ules. As is mentioned, an insert move may put a job
to another feasible processing position on its current
machine, or put it to another machine. The former
operations are named intra-machine insert moves,
while the latter inter-machine insert moves. The two
kinds of operations will be discussed in the following.
Intra-machine Insert Moves. Suppose job j is in-
serted to another processing position on the same ma-
chine. If the processing of job j is advanced after
insertion, it is inserted forward. Otherwise, it is in-
serted backward. If job j is processed immediately
before job i, it is inserted to the front of job i. If job j
is processed immediately after job k, it is inserted to
the back of job k (As Fig.1 shows).
j k
i
Insert to the back of job k
Insert to the front of job i
Figure 1: Intra-machine insert moves.
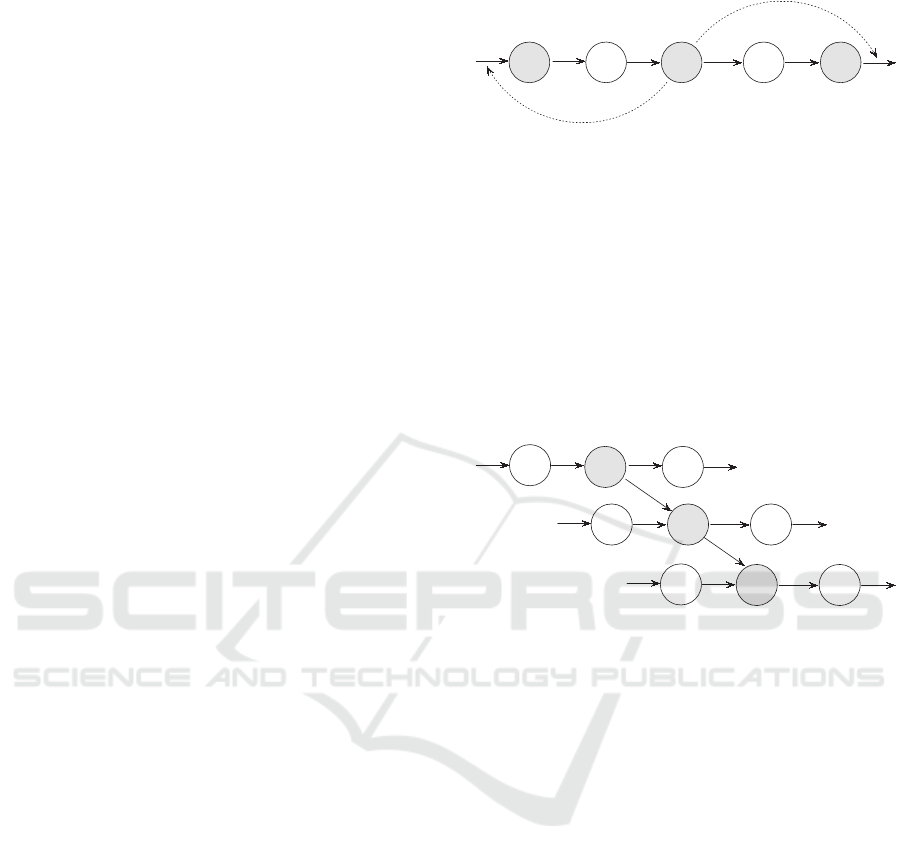
Suppose job i, j, k are processed on different ma-
chines, where job i is the direct predecessor and job
k the direct successor of job j. In this case, it is said
that job j has an emanating constraint to job k, and a
sinking constraint from job i. If the precedence con-
straint i → j is part of a critical path, job j has a crit-
ical sinking constraint. If j → k is part of a critical
path, then job j has a critical emanating constraint (As
Fig.2 shows).
j
k
i
Figure 2: Critical sinking constraint and emanating con-
straint.
Lemma 2. Suppose job j has a critical emanating
constraint in schedule S
1
. In the neighboring schedule
S
2
generated by inserting job j backward, job j still
has a critical emanating constraint.
Lemma 3. Suppose job j has one or more critical
sinking constraints in schedule S
1
. In the neighboring
schedule S
2
generated by inserting job j forward, job
j still has one or more critical sinking constraints.
Corollary 1. Suppose job j has no critical sinking
constraint in schedule S
1
. In the neighboring schedule
S
2
generated by inserting job j backward, job j has no
critical sinking constraint.
Corollary 2. Suppose job j has no critical emanating
constraints in schedule S
1
. In the neighboring sched-
ule S
2
generated by inserting job j forward, job j has
no critical emanating constraint.
Lemma 4. Suppose there are jobs j ≺ j + 1 ≺ ... ≺ k
processed on the same machine in schedule S
1
, where
job j has no critical sinking constraint, and jobs
j + 1, ..., k have no critical emanating constraint. In
this case, the total resource consumption of the neigh-
boring schedule S
2
generated by inserting job j to the
back of job k is no less than that of S
1
.
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
472

Proof. (By contradiction) Assume the resource con-
sumption of schedule S
2
is smaller than that of the
schedule S
1
, that is,U
S
2
< U
S
1
. Since job j has no crit-
ical sinking constraint in S
1
, it has no critical sinking
constraint in S
2
. Similarly, job j + 1, ..., k also have
no critical emanating constraint in S
2
. Now construct
a new schedule S
3
, where all the job-processing times
are the same as those in S
2
, and job j is moved to its
original position in S
1
. It can be easily observed that
the makespan of S
3
is no larger than K. Now generate
a new schedule S
4
by optimizing the job-processing
times of S
3
. Obviously, there is U
S
4
≤ U
S
3
. However,
since schedule S
4
is exactly the same as S
1
, it causes
a contradiction. The lemma is proved.
Lemma 5. Suppose there are jobs i ≺ ... ≺ j− 1 ≺ j
processed on the same machine in schedule S
1
, where
job j has no critical emanating constraint, and jobs
i, ..., j − 1 have no critical sinking constraint. In this
case, the total resource consumption of the neighbor-
ing schedule S
2
generated by inserting job j to the
front of job i is no less than that of S
1
.
Suppose there are job j and job k processed on dif-
ferent machines, where job k may or may not be the
successor of job j. Because of the precedence con-
straints, when job j is inserted backward, job k must
be processed after job j is completed. In this case, it
is said that job j has an emanating constraint path to
job k. In the similar way, it can also be defined that
job j has a sinking constraint path from job i.
Lemma 6. Suppose there are job j ≺ j + 1 ≺ ... ≺ k
on the same machine in schedule S
1
, where job k
has a critical emanating constraint to job l, while
other jobs have no critical emanating and sinking con-
straint. Suppose job j has an emanating constraint
path to job l. In this case, the total resource consump-
tion of the neighboring schedule S
2
generated by in-
serting job j to the back of job k is no less than that of
S
1
.
Proof. (By contradiction) Assume the resource con-
sumption of schedule S
2
is smaller than that of the
schedule S
1
, that is, U
S
2
< U
S
1
. Suppose job j has a
direct successor job i processed on another machine
(As Fig.6 shows). It can be easily seen that job j has
a critical emanating constraint to job i, and no critical
sinking constraint in schedule S
2
. It can also be seen
that job j + 1, ..., k have no critical emanating con-
straint in schedule S
2
. Now construct a new schedule
S
3
, where all the job-processing times are the same as
those in S
2
, and job j is moved to its original position
in S
1
. It can be easily observed that the makespan of
S
3
is no larger than K. Now generate a new schedule
S
4
by optimizing the job-processing times of S
3
. Ob-
viously, there is U
S
4
≤ U
S
3
. However, since schedule
S
4
is exactly the same as S
1
, it causes a contradiction.
The lemma is proved.
Lemma 7. Suppose there are job j ≺ j+ 1 ≺ ... ≺ k
on the same machine in schedule S
1
, where job k
has a critical emanating constraint to job l, while
other jobs have no critical emanating and sinking con-
straint. Suppose job j has an emanating constraint
path to job l. In this case, the total resource consump-
tion of the neighboring schedule S
2
generated by in-
serting job j to the back of job k is no less than that of
S
1
.
Based on the above analysis, a set of rules for
intra-machine insert moves are deduced in the follow-
ing:
1. Job j has no critical emanating and sinking con-
straint.
(a) It can be inserted to the back of job k, if job k is
the first job with a critical emanating constraint,
and job j has no emanating constraint path to
the direct successor of job k;
(b) It can be inserted to the front of job i, if job i
is the first job with a critical sinking constraint,
and job j has no sinking constraint path from
the direct predecessor of job i.
2. Job j only has critical sinking constraint. It can be
inserted to the back of the first job k with a critical
sinking constraint.
3. Job j only has critical emanating constraint. It can
be inserted to the front of the first job i with one
or more critical emanating constraints.
4. Job j has critical sinking and emanating con-
straint. No intra-machine insert move shall be per-
formed with it.
Inter-machine Insert Moves. Suppose there are
job i and job j processed adjacently on the same ma-
chine, and job i or job j will be inserted to another
machine. If job i is the predecessor of job j, the prece-
dence constraint i ≺ j still exists after the operation.
If not, the constraint will be eliminated. It can be ob-
served, when a job is inserted to other machines, if no
such precedence constraint can be eliminated, the re-
source consumption of the neighboring schedules will
certainly not be reduced. Therefore, a job j can be in-
serted to other machines only if it satisfies one of the
following conditions:
1. Job j is processed immediately after job i on the
same machine, while job i is not a predecessor of
job j;
2. Job j is processed immediately before job k on the
same machine, while job k is not the successor of
job j.
Parallel-machine Scheduling with Precedence Constraints and Controllable Job-processing Times
473

j k
i
l
jk
i
l
a. Solution S
1
b. Solution S
2
j+ 1 j+ 1
Figure 3: The illustration of lemma 6: (a) Schedule S
1
; (b) Schedule S
2
.
Otherwise, the operation should not be performed.
When job j is inserted to another machine m, it is
first inserted to the earliest feasible processing posi-
tion, and its optimal resource allocation is calculated.
After that, it is inserted to other feasible positions us-
ing intra-machine insert moves, until the best process-
ing position is determined, which will be recorded as
the neighboring schedule generated by inserting job j
to machine m.
2.4 The Tabu Mechanism
Tabu mechanism helps the searching procedure avoid
being trapped in the local minimum. Typically, a
list of mutations, which the procedure is not allow
to make, is kept at any stage of the searching. Ev-
ery time a mutation is made in the current schedule,
the reversed mutation is entered at the top of tabu-
list, while all other entries are pushed down one posi-
tion and the bottom entry is deleted. In this paper, the
schedule is modified by two kinds of moves, so the
tabu-list needs to store them in different ways:
1. Intra-machine insert moves: When a selected
schedule is generated by an intra-machine insert
move performed on job j, the corresponding tabu-
list entry is recorded as (i, j), where i is the job
(may possibly be dummy) that is processed imme-
diately before job j before the move is performed.
Therefore, any intra-machine insert move that re-
sults in job j processed immediately after job i
will be tabued.
2. Inter-machine insert moves: Suppose a schedule
is generated by inserting job j from machine m to
another machine. The tabu-list entry is recorded
as ( j, m), such that any inter-machine insert move
that results in job j processed on machine m will
be tabued.
2.5 The Tabu-search Algorithm
Based on the above discussion, the tabu-search algo-
rithm is designed and presented in the following. The
algorithm contains two input parameters that need be
decided by users, which are:
• MaxIter: The algorithm stops when the objective
function cannot be further improved after a num-
ber of iterations, defined by parameter MaxIter;
• TabuDepth: The maximum number of tabu en-
tries that the tabu list contains, which is normally
set between 6 and 10.
The tabu-search algorithm is formally stated as fol-
lows:
Algorithm 2: The tabu-search algorithm.
1. Have job-processing times compressed to their
lower bound a
j
, and schedule jobs by LTAP
method. If the makespan is no larger than the dead-
line K, calculate the optimal job-processing times,
and let the result be the initial solution.
2. Generate the initial solution by LTAP method. Let
IterCounter = 0;
3. Improve the initial solution using insert moves:
1. Generate neighboring schedules for every criti-
cal job using insert moves alone;
2. Select among them the one with the smallest
objective function value. If there are more than
one such schedules, select one randomly;
3. If the selected schedule is better than the cur-
rent schedule, or the operation is not tabued, let
the schedule replace the current schedule. Oth-
erwise, remove the schedule from the neighbor-
hood, and repeat Step 2.2;
4. If the solution is improved, let IterCounter = 0.
Otherwise, let IterCounter = IterCounter+ 1;
5. If IterCounter > MaxCntInst, go to Step 3;
6. If the objective function value of the solutions
keeps unchanged over MaxCntObj times, push
the objective function value of the selected
schedule into the tabu-list. Otherwise, push
the reversed operation that leads to the selected
schedule into the tabu-list. Go to Step 2.1.
4. Select the best schedule obtained so far as the
current schedule. Clear the tabu-list. Let
IterCounter = 0;
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
474

5. Improve the current solution using insert and swap
moves:
1. Generate neighboring schedules for every criti-
cal job using insert moves and swap moves. If a
schedule that is better than the current schedule
is generated, then go to Step 4.2 directly;
2. Select among them the one with the smallest
objective function value. If there are more than
one such schedules, select one randomly;
3. If the selected schedule is better than the cur-
rent schedule, or the operation is not tabued, let
the schedule replace the current schedule. Oth-
erwise, remove the schedule from the neighbor-
hood, and repeat Step 4.2;
4. If the solution is improved, let IterCounter = 0.
Otherwise, let IterCounter = IterCounter+ 1;
5. If IterCounter > MaxCntSwp, go to Step 5;
6. If the objective function value of the solutions
keeps unchanged over MaxCntObj times, push
the objective function value of the selected
schedule into the tabu-list. Otherwise, push
the reversed operation that leads to the selected
schedule into the tabu-list. Go to Step 4.1.
6. Select the best schedule obtained so far as the so-
lution, and exit.
3 NUMERICAL EXPERIMENT
A set of numerical experiments were performed in
this section. The algorithm is implemented in C++
and is capable for parallel computing. The experi-
ments were carried out on a personal computer with
an Intel i7-2600 CPU with 4 cores and 8 indepen-
dent threads. The algorithm was tested on problem
instances generated by following method:
1. The minimum processing time a
j
of the jobs are
distributed randomly between [10, 50]. The max-
imum processing time b
j
= a
j
+ δ
j
, where δ
j
is
also distributed between [10, 50];
2. The compression rate θ
j
is distributed between
[0.5, 1.5];
3. Each job has some predecessors, the number of
them is distributed between [0, 5];
4. The maximum depth of the precedence tree is 5.
Because jobs are generated randomly, their number
in each problem instance is different. For each in-
stance, jobs are processed on 10 machines first, then
on 25 machines. After the initial schedule is deter-
mined, a minimum makespan T
min
is calculated with
all the job-processing times p
j
= a
j
, and a maxi-
mum makespan T
max
with p
j
= b
j
. The deadline
K = T
min
+ (T
max
− T
min
) ∗ θ, where θ is random be-
tween [0.3, 0.6].
Because no similar study on this problem is
known in literature, the experimental result cannot be
compared to other algorithms. Therefore, it is ana-
lyzed by comparing the scheduling result against the
initial solution, which is shown Table 1 by following
columns:
• n, m: The number of the jobs and the machines;
• Init, Rst: The resource consumption of the initial
solution and that of the scheduling result;
• Imp: The improvement of the scheduling result
against the initial solution, calculated as
Imp =
Rst
Init
100%
• Rst Time: The computing time when the best
scheduling result is found;
• Total Time: The total computing time of the
scheduling procedure.
The experimental result shows the heuristic ini-
tial solutions are significantly improved by the tabu-
search algorithm. For most problem instances with
job number around 200, the best scheduling results
can be obtained normally within 60 minutes. More-
over,as thesearching procedureis performed in paral-
lel, the computing time can be easily reduced by using
more powerful computers. Therefore, the algorithm is
capable for providing satisfactory solutions for media
and large-scaled problems within acceptable comput-
ing time.
4 SUMMARY
A parallel-machine scheduling problem is considered
in this paper, where job-processing times can be com-
pressed by allocating extra resource to the jobs. A
tabu-search algorithm is designed to optimize job-
processing sequence and processing times, such that
the makespan does not exceed deadline K, while the
total resource consumption can be minimized. Ex-
periment shows the algorithm is capable for provid-
ing satisfactory near optimal solutions for media and
large-scaled problems.
ACKNOWLEDGEMENTS
This paper is supported by the National Natural Sci-
ence Foundation of China (No.61203183), and by
CERNET Innovation Project (NGII20161201).
Parallel-machine Scheduling with Precedence Constraints and Controllable Job-processing Times
475

Table 1: Experimental results for problem instances generated with [a, b] = [10, 80], MaxPred = 6 and TreeDepth = 8.
n m = 10 m = 25
Init Rst Imp Rst Time Total Time Init Rst Imp Rst Time Total Time
51 1474.4 1314.8 89.2% 00:09:21 00:23:48 1179.8 991.0 83.9% 00:12:24 00:29:17
64 1808.2 1641.8 90.8% 00:11:54 00:35:12 1500.8 1375.5 91.7% 00:09:42 00:27:32
71 2073.4 1730.9 83.4% 00:11:06 00:43:21 1808.2 1616.4 89.4% 00:13:57 00:31:48
78 2152.6 1868.4 86.9% 00:14:13 00:36:04 1956.5 1774.5 90.7% 00:13:42 00:44:40
82 2301.8 1976.5 85.9% 00:13:43 00:42:19 2005.2 1758.6 87.7% 00:10:57 00:26:32
88 2475.6 2153.2 87.0% 00:16:43 00:45:19 2232.3 1959.9 87.8% 00:14:02 00:35:19
93 2481.2 2064.1 83.2% 00:17:23 00:41:14 2132.5 1937.8 90.9% 00:16:44 00:32:47
114 3415.5 3104.7 90.8% 00:20:41 00:53:34 3363.1 2845.1 84.6% 00:15:50 00:38:10
126 3865.7 3486.2 90.2% 00:23:57 00:57:22 3543.4 3029.6 85.5% 00:17:53 00:41:47
130 3644.3 3305.1 90.7% 00:19:31 00:54:22 3513.1 2954.4 84.1% 00:19:26 00:37:53
149 4715.5 3965.4 84.1% 00:19:15 00:58:10 3965.7 3429.7 86.5% 00:17:23 00:36:24
155 4455.8 3697.6 82.9% 00:31:12 01:05:24 4134.7 3596.6 87.0% 00:29:12 00:51:21
166 5158.4 4306.9 83.5% 00:33:52 01:04:13 4814.3 4259.5 88.5% 00:24:26 00:49:31
196 6043.5 5360.1 88.7% 00:42:25 01:23:04 5499.1 4844.6 88.1% 00:37:10 00:57:23
217 6401.7 5472.8 85.5% 00:42:35 01:35:43 5985.0 5081.3 84.9% 00:39:21 01:04:31
233 7024.6 6089.8 86.7% 00:57:51 01:54:53 6712.4 5752.2 85.7% 00:53:54 01:23:19
254 7485.8 6541.9 87.4% 00:55:26 01:56:27 6903.6 5867.6 85.0% 00:48:45 01:21:28
REFERENCES
Graham. R.L., Lawler. E.L., Lenstra. J.K., Rinnooy.
A.H.G., 1979. Optimization and approximation in de-
terministic sequencing and scheduling: a survey. An-
nals of Discrete Mathematics, 5: 287-326.
Vickson., 1980. Two single machine sequencing problems
involving controllable job processing times. AIIE
Transactions, 12(3): 258-262.
Cheng. T.C.E, Kovalyov. M.Y., Shakhlevich. N., 2006.
Scheduling with controllable release dates and pro-
cessing times: total completion time minimization.
European Journals of Operations Research, 175: 769-
781.
Janiak. A., 1991. Single machine scheduling problem with
common deadline and resource dependent release
dates. European Journal of Operational Research, 53:
317-325.
Shabtay. D., Kaspi. M., 2004. Minimizing the total
weighted flow time in a single machine with control-
lable processing times. Computers and Operations Re-
search, 31(13): 2279-2280.
Shabtay. D., Kaspi. M., 2006. Parallel machine scheduling
with a convex resource consumption function. Euro-
pean Journal of Operational Research, 173(1): 92-
107.
Shabtay. D., Steiner. G., 2007. A survey of scheduling with
controllable processing times. Discrete Applied Math-
ematics, 155(13): 1643-1666.
Alidaee. B., Ahmadian. A., 1993. Two parallel machine
sequencing problems involving controllable job pro-
cessing times. European Journal of Operations Re-
search, 70: 335-341.
Jansen. K., Mastrolilli. M., 2004. Approximation schemes
for parallel machine scheduling problem with control-
lable processing times. Computers and Operations Re-
search, 31: 1565-1581.
Xu. K.L., Feng. Z.R., Ke. L.J., 2010, A tabu-search algo-
rithm for scheduling jobs with controllable processing
times on a single machine to meet due-dates. Comput-
ers and Operations Research, 37: 1924-1938.
Glover. F., 1990. Tabu search: a tutorial. Interfaces, 20(4):
665-679.
Dell’Amico. M., Trubian. M., Applying tabu-search to the
job shop scheduling problems. Annals of Operations
Research, 22: 231-252.
Bilge. U., Kirac. F., Kurtulan. M., Pekgun. P., 2004. A tabu
search algorithm for parallel machine total tardiness
problem. Computers and Operations Research, 31(3):
397-414.
Venditti. L., Pacciarelli. D., Meloni. C., 2010. A tabu search
algorithm for scheduling pharmaceutical packaging
operations. European Journal of Operations Research,
202(2): 538-546.
Nowicki., 1995. A bicriterion approach to preemptive
scheduling of parallel machines with controllable job
processing times. Discrete Appl. Math, 63: 23-256.
Fulkerson. D.R., 1961. A network flow computation for
project cost curves. Management Science, 167-178.
Pinedo. M., 2012. Scheduling: Theory, Algorithms, and
Systems. Springer-Verlag. New York, 4th edition.
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
476
