
Intelligent Agents for Supporting Driving Tasks: An Ontology-based
Alarms System
V. Zamora, O. Sipele, A. Ledezma and A. Sanchis
Carlos III University of Madrid, Avda. De la Universidad 30, 28911 Legan
´
es, Madrid, Spain
Keywords:
Ontology, Advanced Driver Assistance System, ADAS, Traffic Scenarios, Multi-agent Systems, Alarms
Systems.
Abstract:
This paper presents a rule-based alarm system as part of an ADAS. This work is developed by using a multi-
agent framework, and it focuses on the driving safety, in particular, in urban environments. The main point of
the proposed system is that it takes decisions based on the fusion of the information from the driver, the vehicle
status and the state of the road ahead, and it is designed to alert the driver of the car (without taking control
of it) only when the system considers that it is necessary. Five dangerous scenarios are defined, analysed and
studied, and a repository of rules is designed to help the driver in that situations. In order to represent the
concepts and its relation about the urban traffic environment, the system uses an OWL Ontology based on a
previous research and extended in this work.
1 INTRODUCTION
Road traffic safety is a subject that is of a great impor-
tance worldwide. Public administrations, especially
European Commission, are concerned about it. The
percentage of people who die on the road each year
has been growing in recent years. According to the
Global status report on road safety 2015 by World He-
alth Organisation (WHO, 2015), road traffic injuries
claim more than 1.2 million lives each year, which
causes a negative social impact, and a negative eco-
nomic impact too. In addition, it is known that about
78% of crashes are due to driver distractions.
That is why both industrial and academic commu-
nities are interested in Advanced Driver Assistance
Systems (ADAS). ADAS are systems developed in
order to help the driver in the driving process, increa-
sing car safety and, more generally, road safety. No-
wadays, more and more vehicles incorporate ADAS,
not only in high-end cars, but also mid-range cars and
even few low-end cars.
These systems use information about the car,
and also contain information about the environment
and/or the driver himself. After a process of reasoning
with obtained data, an ADAS produces a response in
order to avoid or face, for example, dangerous traffic
situations or driver distractions. ADAS responses can
be as a visual alarm, sound alarm, or even taking con-
trol over the car (e.g. turning the steering wheel, bra-
king, etc). However, researches about system warning
design show that an incorrect design can influence ne-
gatively on the driver’s behaviour, on one hand, incre-
asing his/her workload therefore decreasing his/her
situation awareness (Vahidi and Eskandarian, 2003)
and, on the other hand, ignoring the warning produ-
ced by the system (Lee et al., 2004).
In this work, a multi-agent system is developed
to integrate the information provided by a driving si-
mulator and to use this information in order to help
the driver on his driving task in an urban environment
using an ADAS. This support is given by triggering
and showing visual and sound alarms (depending on
the type of launched alarm) when dangerous traffic
situations are occurred.
After this introduction, this paper is organised as
follows. The next section provides an overview of
the background and related work of ADAS and alert
systems. Section 3 describes the conceptual frame-
work in which this research is set. Section 4 details
the data modeling and the definition of traffic scena-
rios, rules and HCI messages. Section 5 explains the
experimentation process, including materials, testing
process and results. And finally, Section 6 presents
the conclusions and suggests some future works gui-
delines.
Zamora, V., Sipele, O., Ledezma, A. and Sanchis, A.
Intelligent Agents for Supporting Driving Tasks: An Ontology-based Alarms System.
DOI: 10.5220/0006247601650172
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 165-172
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
165

2 STATE OF THE ART
As mentioned in Section 1, road traffic safety is a seri-
ous area because of its social and economical impact.
For years, the number of investments and investiga-
tions oriented to this topic has grown both privately
(by automotive companies) and academically. One
recent example of cutting-edge private technology is
IntelliSafe in Volvo. It consists in a number of ADAS
that are incorporated in Volvo cars in order to enhance
their safety such as the world-first intersection bra-
king technology or the bird’s-eye view of the car and
its surroundings that allows driver to see obstacles all
around him (Volvo, 2016).
However, industrial community usually do not
communicate their research results apart from adver-
tises of released products or not specific enough re-
ports. On the contrary, academic community has
been very focused on this topic, aware of affordable
technology for mass-market vehicles.
Examples of ADAS that are already incorporated
in current vehicles are Lane Keeping Assist (LKA)
(National-Safety-Council, 2016), Autonomous Emer-
gency Braking (AEB) (Euro-NCAP, 2016) or Maxi-
mum Speed Permitted Assistant based on Automatic
Signal Detection (Tu and Fuh, 2016).
A recent publication about ADAS is a real time
driver distraction alert system for highway driving
for trucks where, taking account of the controls of
the vehicle, the system is capable to identify dis-
tractions on the driver and to notify him using alerts
(Dababneh, 2016). More recent publications are a
smartphone-based warning system in area of a con-
struction zone that notifies drivers about upcoming
conditions within a construction zone (Qiao et al.,
2016) and a driver intention algorithm for pedestrian
protection and AEB systems (Diederichs et al., 2015).
The latter is an algorithm developed to detect driver’s
intention before initiating such transitions to automa-
ted driving as AEB in order to avoid annoyance, and
it is based on eye tracking of the driver and pedal acti-
vity of the vehicle. These systems are not included in
vehicles yet, but they represent new opportunities for
the future vehicles.
The research presented in this paper is based on
(Gutierrez et al., 2014). This paper presents an agent-
based system as part of the development of an ADAS
focused on urban driving safety. This system takes de-
cisions using information from the driver, the vehicle
status and the state of the environment. To represent
the concepts and its relation about the urban traffic en-
vironment, an OWL Ontology is developed (Feld and
Mller, 2011).
Most of new researches and discoveries require
the reproduction of dangerous, extreme or even unu-
sual or impossible driving situations. Play this situ-
ations in real life would be sometimes unhealthy and
unethical, so that is why most of them use a driving si-
mulator (i.e. a truck driving simulator in (Dababneh,
2016)). This allows making any experiment, to recre-
ate any situation and to obtain all possible data of it.
Nowadays, there is a hard inter-brand competition
in ADAS and road safety in the car sector. Thus, most
of published research reports are too unspecific or un-
clear, so there is limited information about driving si-
mulators employed. Each brand usually has its own
driving simulator and doesn’t share much information
about it.
Examples that have been obtained of driving si-
mulators able to researchers are Carnetsoft research
driving simulator (Carnetsoft, 2016), VS500M car
driving simulator for educational and research activi-
ties (Simulation, 2016) or ST Software driving simu-
lator for research (Software, 2007).
In relation with these work, the realised works in
(Olmeda et al., 2013) (Pel
´
aez et al., 2012) (Musleh
et al., 2012) are focused on the development of ADAS
modules with the integration of new physic sensors on
vehicles, such as laser technology or cameras, and the
development of analysis methods that take the signal
produced by these sensors and obtain high level infor-
mation about the driving environment.
3 CONCEPTUAL FRAMEWORK
As it has been exposed before, there is a growing
trend of incorporating each time more ADAS with
safety features. Consequentially, SAE International
(Society of Automotive Engineers) defines a scale for
identifying an ADAS according to the automatisation
level that offers while a driving task is been perfor-
med (SAE, 2014). Focusing our attention on ADAS
without automatisation of driving controls and whose
purpose is only to warn about potentially risky situ-
ations, they don’t take account whether the driver is
aware about the risk or not. Therefore, to increase
this kind of systems on the instrumentation of the car,
keeping the independence between themselves and ig-
noring the driver’s perception could become counter-
productive, because the driver may be saturated with
a lot of irrelevant warning messages. Thus, the direct
consequence of this fact is that these systems could
lose their effectiveness and all the meaning for which
they were designed.
We propose a system that acts as a human Co-
driver, providing to the driver of the car only the rele-
vant information for him/her on each moment. High-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
166
level ADAS that manages all the other ADAS with sa-
fety features and identify whether the driver of the car
really needs the information provided through these
ADAS according to his/her attention level. All this
information will be unified under the same interface
and the interaction with the driver of the car will be
adapted to the environment requirements, where the
driver must pay attention on the driving task at most
of the time.
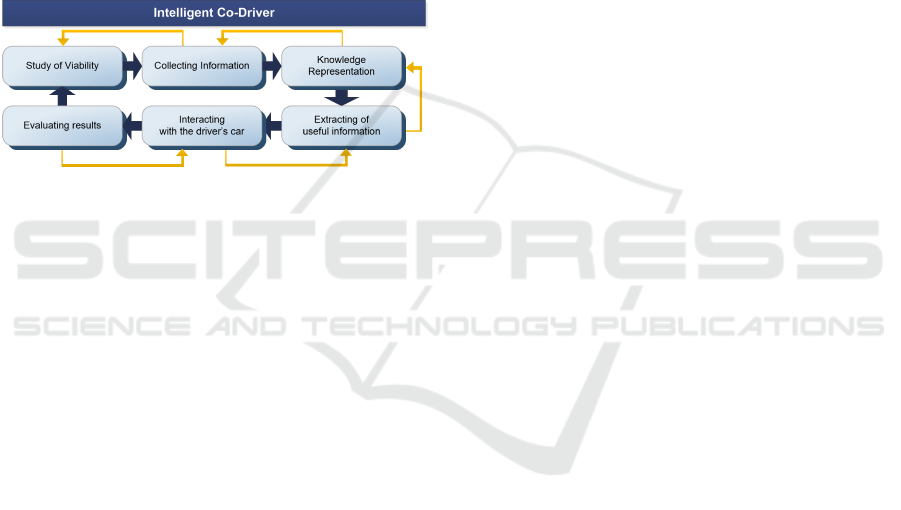
The Figure 1 shows an overview of the conceptual
framework for the development of the Intelligent Co-
Driver where are included the involved concepts for
designing this ADAS approach based on providing to
the driver relevant high-level information about dri-
ving task on real time.
Figure 1: Overall Conceptual Framework for development
intelligent Co-Driver.
The Intelligent Co-Driver development process
involves several disciplines and research fields such
as Electrical Engineering, Signal Theory, artificial in-
telligence including the computer vision and the pre-
dictive computational models.
How it can be seen in Figure 1, the Intelligent
Co-Driver development follows a continuous impro-
vement cycle composed by five activities basically.
At first, this cycle starts by studying how an Intel-
ligent Co-Driver functionality can improve the road
safety and User Experience (uEx), analysing what are
the needs of a driver while he/she is performing a
driving task, studying its viability and evaluating its
acceptance level and the socio-economic impact that
would mean its implantation on the vehicles.
Secondly, it is performed the collecting informa-
tion activity that consists of the researching about
what information is required for the development of
Intelligent Co-Driver and what are technological re-
sources that provide that information.
Next, on the knowledge representation activity it
is studied the best way of modeling all the informa-
tion obtained on the previous activity through the on-
tology. The main goal is the standardisation of a data
model that should consider all the possible aspects in-
volved on a driving task.
Then, it is conducted the extracting of useful in-
formation activity that consists on a research process
that takes the data model as input for obtaining cogni-
tive model for a specific Co-Driver functionality that
provides relevant information for the driver.
After, the driver interaction activity studies what
is the better way for transmit this useful information
to the driver regardless of age, sex and his/her level of
familiarisation with the new technologies.
Finally, the Co-Driver is evaluated in terms of usa-
bility, reliability and performance. At the end of this
activity, the cycle comes back to its first activity.
Each activity is feedback for its next activity,
going back if it will be necessary in order to accom-
plish the established requirements at beginning of the
development process.
4 SYSTEM DESCRIPTION
In this section, it is described the alarm system ba-
sed on rules that has been developed, by detailing the
data modeling and the traffic scenarios, rules and HCI
messages that have been defined.
4.1 Data Modeling
The alarm system works in the driving simulator en-
vironment, and it has to read, interpret and understand
all the information that is in there. That is why all the
data has to be modeled, structured and integrated.
Data modeling is done by designing an OWL/RDF
Ontology, which provides a formal definition that gi-
ves semantic structure to data. It represents the con-
cepts and its relation about the urban traffic environ-
ment, and this concepts contain information that co-
mes from the driver, the elements outside the vehicle,
and from the vehicle itself. Therefore, each instance
of the ontology is a traffic situation that is going to be
analysed, and making queries to the ontology allows
getting this instances.
As mentioned in Section 2, this research is based
on (Gutierrez et al., 2014). In that paper, it is designed
and described an OWL/RDF Ontology that represents
the starting point for data modeling in this work. It
can be observed that concepts of car, driver, car con-
text, pedestrian and pedestrian crossing the street are
defined, and each one of these concepts has its own at-
tributes. Right after, it is described the discrete values
that have been used in this work for each attribute.
• Car:
– Distance to car: far away, far, normal, close,
very close.
– State (of the vehicle): moving, stopped.
• Driver.
Intelligent Agents for Supporting Driving Tasks: An Ontology-based Alarms System
167

– Area of vision: front, front-right, front-left,
left, right, behind-left, behind-right, interior
rearview mirror, left exterior rearview mirror,
right exterior rearview mirror, speedometer, ra-
dio / air conditioning / down, roof / up.
– Attentive: yes, no.
– Horizontal/vertical direction of the eyes:
centre, left/up, right/down.
• CarContext.
– Existence of car in front/left/right: yes, no.
– Existence of pedestrian/pedestrian crossing:
yes, no.
• Pedestrian.
– Angle (relative to driver): front, front-left,
front-right.
– Distance: far away, far, normal, close, very
close.
– Trajectory: N, S, E, W, NW, NE, SE, SW.
• PedCrossing.
– Distance to pedestrian: far away, far, normal,
close, very close.
As mentioned before in this section, this ontology
represents a starting point. It represents basic con-
cepts, but it is incomplete. For this actual research,
the ontology is extended in order to encompass a wi-
der range of information and, thus, be able to address
more complex danger situations with the rule-based
decision-making system developed.
It is added to the car context the existence of
cars near the considered, in more positions: behind,
behind-left, behind-right, front-left and front-right.
Besides, it is included a new concept: the concept of
the driver’s vehicle (MyCar). This concept has the
following attributes:
• MyCar.
– Brake/Clutch/Throttle: full, none, medium.
– Gear: -1, 1, 2, 3, 4, 5, 6.
– Lat/long accel.: high, medium, low, null.
– Revolutions per minute: [0, maxRev].
– Speed: high, medium, low, null. (It is defined
medium speed as approximate values relative to
maximum track speed).
– Steering wheel angle: left, centre-left, centre,
centre-right, right.
The proposed ontology diagram is shown in Fi-
gure 2.
4.2 Defining Traffic Scenarios
This research is oriented to urban driving. In addition
to the fact that most of researches are based on road
driving (Dababneh, 2016), in urban driving there are
many potential dangerous situations.
In this work, five dangerous traffic scenarios
are defined and analysed. To identify and define
these scenarios, an online survey was conducted
to drivers with different profiles (age, sex, expe-
rience, among others) about dangerous situations of
urban driving and the acceptance of an ADAS in
such cases (surveys and results can be found on
http://www.caos.inf.uc3m.es/adas-driver-modeling/).
Consequently, a previous work about identifying
risky driving situations and the survey results, the fol-
lowing five driving scenarios were defined, conside-
ring them as representative for this first approach. The
concepts that are included in the proposed ontology
are used in order to define them.
• Scenario 1: Risk of frontal collision. The dri-
ver is distracted on a road where there is medium-
intense traffic, and the distance to the car that pre-
cedes the driver is reduced, becoming very short.
• Scenario 2: Risk of running over. While the dri-
ver is circulating through an urban environment, a
pedestrian crosses the road at a distance relatively
close to the vehicle.
• Scenario 3: Risk of rear collision. An overta-
king is going to take place, but the car behind the
driver’s vehicle is overtaking or initiates the pas-
sing too.
• Scenario 4: Risk of lateral collision. While
the driver is circulating through an urban envi-
ronment, a stopped car starts and initiates the mo-
vement in a relatively short distance.
• Scenario 5: Pedestrian not visualised. While
the driver is circulating through an urban environ-
ment, a pedestrian crosses the road from behind
a parked vehicle or there is an object that makes
the pedestrian not visible to the driver. The diffe-
rence between scenario 2 and this scenario is that
now the pedestrian is not always visible, so now
the situation is more critical.
4.3 Defining Rules
Once data have been integrated, modeled and structu-
red, and the scenarios have been designed, the rules
can be defined. Specifically, seven rules are defined
to identify the five dangerous scenarios established,
with the objective of helping and warning the driver
in order to avoid road accidents.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
168
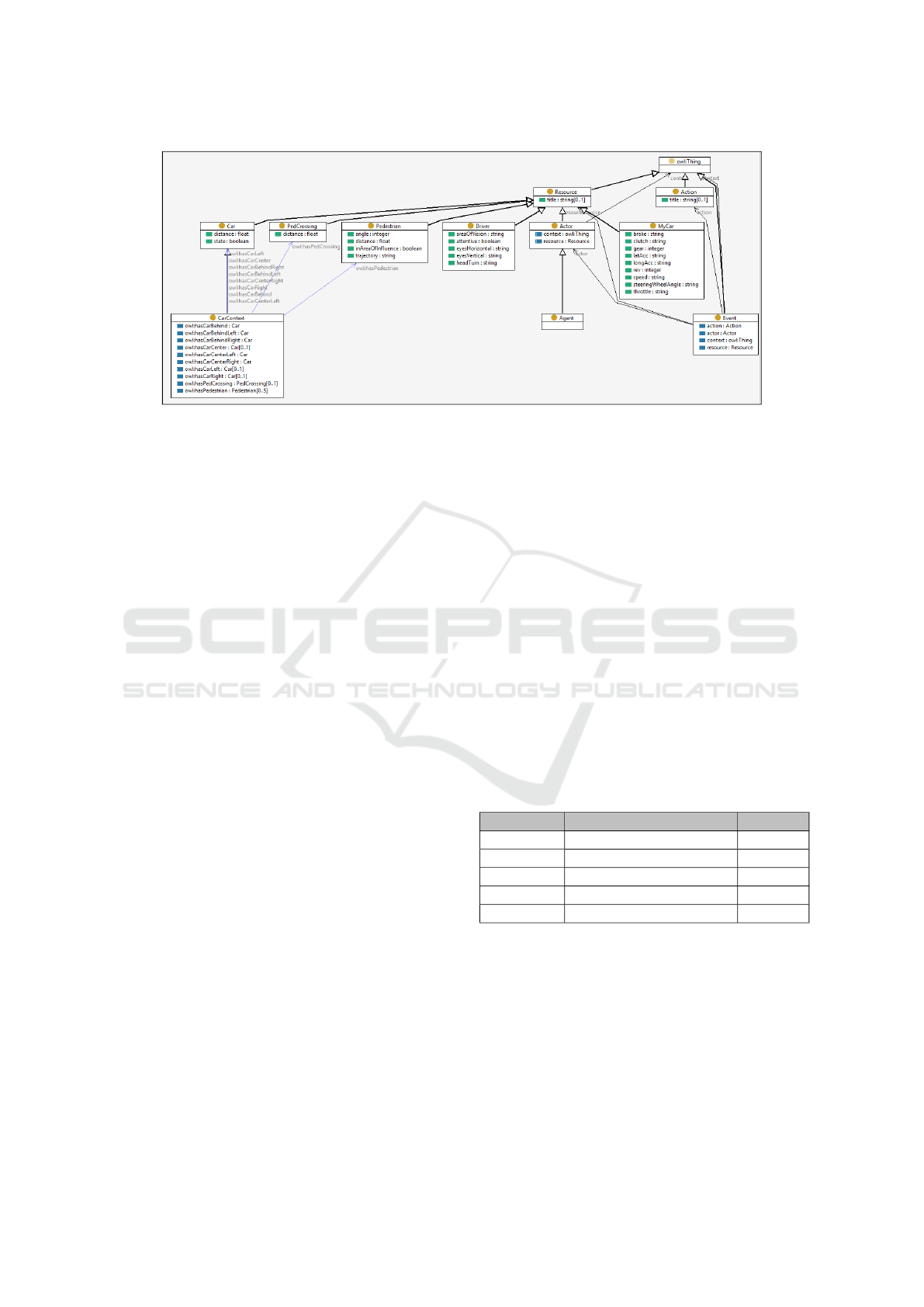
Figure 2: Proposed ontology diagram.
An expert system design process was carried out
for the rules definition. This process required gather-
ing information from several sources such as (1) con-
ducting interviews with driving instructors, (2) ana-
lysing the Spanish driving regulation and driving ma-
nual (DGT, 2017) that define how the driver must deal
with each driving situation and (3) obtaining the dri-
vers’ opinion with the conducted surveys.
Each scenario has one or several rules that detect
the potential danger and launch an alarm to the driver.
It is shown each rule/set of rules for each scenario
below. It is described the situation that makes the rule
to be activated, and, thus, the rule produces an output.
• Scenario 1: Risk of frontal collision.
– There is a car, close or very close, in front of
the vehicle.
– The driver is not attentive.
– The speed of the vehicle is medium or high.
• Scenario 2: Risk of running over (two rules, one
for pedestrians that cross to left and one for pede-
strians that cross to right).
– There is a pedestrian, close or very close, cros-
sing the street.
– The driver is not attentive.
– The speed of the vehicle is medium or high.
• Scenario 3: Risk of rear collision.
– There is a car, close or very close, in front of
the vehicle.
– This car is going to be overtaken by the vehicle.
– There is a car in movement behind the vehicle,
close or very close, that could want to pass the
car too.
• Scenario 4: Risk of lateral collision.
– There is a car parked on the right side of the
road that may start and join the road.
– This parked car is very close, close or medium
distance.
– The driver is not attentive.
• Scenario 5: Pedestrian not visualised (two rules,
one for pedestrians on the left side and one for
pedestrians on the right side).
– There is a parked car ahead of the vehicle.
– There is a pedestrian behind of the parked car.
– The trajectory described by the pedestrian’s
movement indicates he/she is going to cross the
road.
Since the system has only one output, a hierarchy
of alarms is needed and has been implemented. The
same process as the dangerous situations has been fol-
lowed in order to design the implemented hierarchy.
This hierarchy is shown below (Table 1).
Table 1: Alarm hierarchy (ordered from highest to lowest
priority).
Scenario Alarm Priority
Scenario 2 Risk of running over 1
Scenario 1 Risk of frontal collision 2
Scenario 5 Pedestrian not visualised 3
Scenario 4 Risk of lateral collision 4
Scenario 3 Risk of rear collision 5
Consequently, if two different alarms are laun-
ched, only the one with the highest priority will be
processed. The highest priority scenario is given by
the risk of running over, because human life is in dan-
ger. Next, there is the risk of frontal collision, follo-
wed by the hit of an unseen pedestrian. This order is
followed because a car cannot hit a pedestrian if the
vehicle has something in front that prevents the pas-
sage. Then, there is the risk of lateral collision and,
finally, the risk of rear collision, since an overtaking is
Intelligent Agents for Supporting Driving Tasks: An Ontology-based Alarms System
169

only going to be made if no other situation of danger
occurs.
4.4 Defining HCI Messages
Now, the dangerous scenarios that have been defined
are detected and alarms are generated by the rules.
These alarms are oriented to warn the driver, and are
designed to be clear but not annoying (an alarm is
launched only when it is truly necessary).
For each risk scenario rule/set of rules, there is
a different kind of visual alarm. Each alarm corre-
sponds with an image that is showed in the HCI inter-
face, as shown in Figure 3.
Figure 3: An alarm is showed in the HCI interface of the
driving simulator.
The images that correspond with the different
alarms for each scenario are shown below (Figure 4).
They are ordered from left to right (scenario 1 is the
first image, scenario 2 is the second image, etc.).
Figure 4: Visual alarms that are produced by the rules.
In addition to the visual alarm, due to the level of
danger, in certain cases there is also a sound alarm.
These cases are the alarms associated with the scena-
rios 1 (risk of frontal collision), when the distance is
very short, and 5 (pedestrian not visualised). Again,
this sound alarm is designed to be clear, but not an-
noying to the driver.
5 EXPERIMENTATION
In this section, the process of experimentation is des-
cribed, by detailing the used material, the design of
the testing process and the obtained results.
5.1 Experimental Setup
For the performing of this work has been used several
resources that will been described as follows. The Fi-
gure 5 shows a simplified scheme about the testing
infrastructure used for this work where it can distin-
guish the interaction between three systems.
Figure 5: Testing infrastructure scheme.
Firstly, the Driving Simulator System with
the STISIM Drive Simulation Software (Sys-
tems Technology, 2013), driving devices and three
screens for 135 degrees vision that provide a more re-
alistic driving experience. This simulation software
includes several driving scenarios that reproduce real
driving situations and allows getting access and mana-
ging to all simulation parameters on real time through
a middleware layer. In addition, a Route Management
Module is developed in order to give the capacity to
the driving simulator of reproduce real routes for tes-
ting the system (Zamora et al., 2016). So, this system
provides the next aspects:
• Vehicle Dynamics. All the parameters related
with the driven car such as speed, gear, steering
wheel angle, pressure level of the pedals, among
others.
• Driving environment. The extraction of high-level
information about the driving environment is per-
formed by the Environment Agents described in
(Sipele et al., 2016).
• Interface Agent. It is a virtual Human-Computer
Interface (HCI) is deployed on the simulator
screen and it will raise the received alarms by the
Alarm System through visual and sound messages
to the driver’s car.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
170

Secondly, the Monitoring System uses the Micro-
soft Kinect camera and a software implementation for
extracting useful information about the driver such as
the orientation of his/her head and a driver’s eye gaze
estimation.
Thirdly, the Alarm system has been implemented
using the Java Agent Development Environment Fra-
mework (JADE) (Italia, 2016) and its third-party Add-
on Web Service Integration Gateway (WSIG) (Bo-
ard, 2015). This implementation allows to establish
a communication system based on Service Oriented
Architecture (SOA). Thus, from the driving simula-
tion system is sent a Driving situation instance as a
web service request message to the Alarm System.
This request message is received by the WSIG Agent
where is processed and transferred to the implemen-
ted Alarm Agent. Finally, if the implemented Alarm
Agent produces an alarm, it will be communicated to
WSIG Agent that will send the alarm message to the
Interface Agent.
5.2 Testing Process Design
The objective of the testing process is to check if the
created repository of rules is able to detect the given
dangerous scenarios and if it is able to launch the cor-
responding alarm (visual or visual and sound).
The system is tested with black box tests in two
different ways. The first way is directly in the de-
signed web environment, where each test is codified
in XML. Then, the XML is introduced to the system
as a request, and it generates a response indicating
whether a dangerous situation is detected or not, and
the corresponding alarm. These codified tests corre-
sponds with ontology instances, where each concept
and its attributes are described and take concrete va-
lues.
The second way of testing the system is perfor-
ming the tests on the simulator. While the driving task
is in process, the simulator creates instances of the on-
tology with values according with the actual driving
situation, and these instances are sent to the system
as a request. This way, when a dangerous scenario is
given, the corresponding visual (or visual and sound)
alarm is shown.
5.3 Results
As mentioned in Section 5.2, the system is verified
following two different processes: directly in the de-
signed web environment and using the driving simu-
lator. The first of the described processes is used du-
ring the rule design phase, since it is possible to test
each rule separately. In this way, it could be checked
that all rules work correctly while they are being de-
signed, one by one. However, this testing process is
not enough, because the used instances are ”artificial”
(implemented manually).
The second of the described processes is used to
test the complete repository of rules. The progress of
the testing process is similar to driving a real car. Ex-
amples of alarms launched in the HCI of the driving
simulator are shown in Figure 3.
This testing process is more complete than the pre-
vious one, because the system is tested as if it were
implemented in a real-world environment by using the
driving simulator. It is checked that all the defined
dangerous scenarios are detected and the correspon-
ding alarms are launched.
As far as we know, there are no other related
works about this specified research line focused on
establish a hierarchical alarm system based on urban
driving situation analysis that works as a co-driver,
only warning the driver when it is necessary. There-
fore, a comparison cannot be showed.
6 CONCLUSIONS AND FUTURE
WORK
In this paper, it is presented a rule-based alarm system
based on a multi-agent system previously proposed
(Gutierrez et al., 2014).
This work is developed to integrate the informa-
tion provided by a driving simulator and to use this in-
formation to help the driver on his driver task by trig-
gering and showing visual or visual and sound alarms
when dangerous traffic situations happen. It is focu-
sed in urban environments, where there are many po-
tential dangerous situations caused, in most cases, by
distractions of the driver.
The entire project represents an approach to an
ADAS, so the final objective is to be embed in real
vehicles and to use real data provided by real sensors.
Consequently, as a future work there is the extension
of the system in order to take account of more dan-
gerous situations, by obtaining more information and
by defining more rules, and in order to complete the
existing scenarios.
One limitation of the system correspond with the
value of the attributes of the concepts, since they are
categorical. The system would be more precise if data
were numerical, so it is a future work to be accomplis-
hed.
Since the system only can give one output, it is
necessary to implement an alarm hierarchy. If the
number of scenarios is extended, this hierarchy would
be much more complex. That is why it is a future
Intelligent Agents for Supporting Driving Tasks: An Ontology-based Alarms System
171

work the implementation of this system using fuzzy
logic, which allows considering all the rules at the
same time and, this way, dispensing the need of the
hierarchy of alarms.
Finally, taking account the human factors invol-
ved on the driving warning systems, aspects such as
time reaction, situation awareness, divided attention,
among others, will be studied for improving of the
designed alarm system.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish Mi-
nistry of Economy, Industry and Competitiveness,
(TRA2015-63708-R) and (TRA2016-78886-C3-1-R)
Projects.
REFERENCES
Board, J. (2015). JADE Web Services Integration Gateway
(WSIG) Guide.
Carnetsoft (2016). The carnetsoft driving simula-
tor. URL: http://www.carnetsoft.com/. (Last access:
20/11/2016).
Dababneh, L. F. (2016). Development and validation of
a driver distraction alert system for highway driving
using a truck driving simulator. In Electronic Theses
and Dissertations. UOIT.
DGT (2017). Normativa y legislaci
´
on. URL:
https://goo.gl/4gDo6C. (Last access: 17/02/2017).
Diederichs, F., Schttke, T., and Spath, D. (2015). Driver
intention algorithm for pedestrian protection and au-
tomated emergency braking systems. In 2015 IEEE
18th International Conference on Intelligent Trans-
portation Systems, pages 1049–1054.
Euro-NCAP (2016). Autonomous emergency braking.
URL: https://goo.gl/yj2rkJ. (Last access: 22/09/2016).
Feld, M. and Mller, C. (2011). The automotive ontology:
Managing knowledge inside the vehicle and sharing it
between cars. In Proceedings of the 3rd International
Conference on Automotive User Interfaces and Inte-
ractive Vehicular Applications, Automotive UI 2011,
pages 79–86.
Gutierrez, G., Iglesias, J. A., Ordo
˜
nez, F. J., Ledezma, A.,
and Sanchis, A. (2014). Architecture and ontological
modelling for assisted driving and interaction. In In-
formation Fusion (FUSION), 2014 17th International
Conference on, pages 1–8. IEEE.
Italia, T. (2016). Jade. URL: http://jade.tilab.com. (Last
access: 22/11/2016).
Lee, J. D., Hoffman, J. D., and Hayes, E. (2004). Collision
Warning Design to Mitigate Driver Distraction. Chi,
6(1):65–72.
Musleh, B., de la Escalera, A., and Armingol, J. (2012).
Detecci
´
on de obst
´
aculos y espacios transitables en en-
tornos urbanos para sistemas de ayuda a la conducci
´
on
basados en algoritmos de visi
´
o est
´
ereo implementados
en gpu. Revista Iberoamericana de Autom
´
atica e In-
form
´
atica Industrial, 9:462–473.
National-Safety-Council (2016). Lane keeping assist. URL:
https://goo.gl/U2yZPu. (Last access: 22/09/2016).
Olmeda, D., Premebida, C., Nunes, U., Armingol, J., and
de la Escalera, A. (2013). Pedestrian detection in
far infrared images. Integrated Computer-Aided En-
gineering, 20:347–360.
Pel
´
aez, G., Romero, M., Armingol, J., de la Escalera,
A., Mu
˜
noz, J., van Bijsterveld, W., and Bola
˜
no,
J. A. (2012). Detection and classification of road
signs for automatic inventory systems using compu-
ter vision. Integrated Computer-Aided Engineering,
19:285–298.
Qiao, F., Rahman, R., Li, Q., and Yu, L. (2016). Safe and
environment-friendly forward collision warning mes-
sages in the advance warning area of a construction
zone. In International Journal of Intelligent Trans-
portation Systems Research.
SAE (2014). Automated driving. sae international standard
j3016. URL: https://goo.gl/MNBvoh. (Last access:
21/11/2016).
Simulation, V. (2016). Virage simulaion driving simulator
systems. URL: https://goo.gl/Qhz3nP. (Last access:
20/11/2016).
Sipele, O., Zamora, V., Ledezma, A., and Sanchis, A.
(2016). Testing adas though simulated driving situ-
ations analysis: environment configuration. In Pro-
ceedings of the First Symposium SEGVAUTO-TRIES-
CM. Technologies for a Safe, Accessible and Sustaina-
ble Mobility. R&D+I in Automotive: RESULTS, pages
23–26.
Software, S. (2007). Driving simulators for research. URL:
http://www.stsoftware.nl/simulator.html. (Last access:
20/11/2016).
Systems Technology, I. (2013). Stisim drive: Car
driving simulator & simulation software. URL:
https://goo.gl/tOB8Zu. (Last access: 14/09/2016).
Tu, K.-H. and Fuh, C.-S. (2016). The speed-limit sign de-
tection and recognition system.
Vahidi, a. and Eskandarian, a. (2003). Research advances
in intelligent collision avoidance and adaptive cruise
control. IEEE Transactions on Intelligent Transporta-
tion Systems, 4(3):143–153.
Volvo, C. C. (2016). Intellisafe. URL: https://goo.gl/zIqZIf.
(Last access: 20/09/2016).
WHO (2015). Global status report on road safety.
In Violence and Injury Prevention. WHO Library
Cataloguing-in-Publication Data.
Zamora, V., Sipele, O., Ledezma, A., and Sanchis, A.
(2016). Integrating real driving routes in a simula-
ted environment. In Proceedings of the First Sym-
posium SEGVAUTO-TRIES-CM. Technologies for a
Safe, Accessible and Sustainable Mobility. R&D+I in
Automotive: RESULTS, pages 27–30.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
172
