
Evolutionary Optimization Algorithms for Differential Equation
Parameters, Initial Value and Order Identification
Ivan Ryzhikov, Eugene Semenkin and Ilia Panfilov
Institute of Computer Sciences and Telecommunication, Siberian State Aerospace University,
Krasnoyarskij Rabochij. 31, Krasnoyarsk, 660014, Russian Federation
Keywords: Dynamic System, Linear Differential Equation, Evolutionary Strategies, Parameters Identification, Initial
Value Estimation, Order Estimation.
Abstract: A dynamic system identification problem is considered. It is an inverse modelling problem, where one
needs to find the model in an analytical form and a dynamic system is represented with the observation data.
In this study the identification problem was reduced to an optimization problem, and in such a way every
solution of the extremum problem determines a linear differential equation and coordinates of the initial
value. The proposed approaches do not require any assumptions of the system order and the initial value
coordinates and estimates the model in the form of a linear differential equation. These variables are
estimated automatically and simultaneously with differential equation coefficients. Problem-oriented
evolution-based optimization techniques were designed and applied. Techniques are based on the
evolutionary strategies algorithm and have been improved to achieve efficient solving of the reduced
problem for every proposed determination scheme. Experimental results confirm the reliability of the given
approach and the usefulness of the reduced problem solving tool.
1 INTRODUCTION
The dynamical system identification problem is not
new but is still of current importance; it is being
investigated and developed. There are many
different problem definitions and many applications
for the problem. Chemistry, biology, engineering
and econometrics are the scientific fields in which
dynamic system modelling is useful. Some problems
are related to linear differential equations.
This study is focused on the identification
problem, in the case of making the model with only
the output observations of the object and a control
function known. A linear differential equation is
used as a mathematical model of the dynamic
process. It is important to point out that generally
there is no information about the order of the
equation and its initial value coordinates. The
observations are the distorted measurements of the
system output. Many other approaches to the
identification receive the model in the form of an
adequate approximation of the system trajectory. But
for some objects it is necessary to have a model that
determines dynamic system behaviour. For this
reason the solution of the identification problem is
required to be in a symbolic form. It permits the
model to be useful in further research or work. The
model in the form of the differential equation gives
the opportunity to solve the optimal control problem,
predict system behaviour and conduct stability
analysis among other things.
There are many studies on identification
problems and the estimation of the differential
equation parameters. So-called inverse problems
occur for different models: linear differential
equations, partial differential equations, nonlinear
and delay differential equations.
Our work is related to the identification of single
input and single output systems. The proposed
approach is also a useful tool for making a
linearization of any dynamic process, despite its
nature.
The problem of parameter and initial value
estimation in the case of a known structure is also a
complex problem and many approaches are being
developed. Some approaches are based on the pre-
processing of sample data (Fang et al., 2011), (Wu et
al., 2012). Also there is a class of approaches which
are based on the shooting or multiple shooting idea,
(Peifer et al., 2007), or nonparametric estimation
168
Ryzhikov, I., Semenkin, E. and Panfilov, I.
Evolutionary Optimization Algorithms for Differential Equation Parameters, Initial Value and Order Identification.
DOI: 10.5220/0005979201680176
In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2016) - Volume 1, pages 168-176
ISBN: 978-989-758-198-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(Brunel, 2008). In the paper (Schenkendorf et al.,
2014) flatness was used for parameter identification
problem solving for ordinary differential equations
(ODE) and ODE with a delay. There are many
works on parameter estimation in the case when the
equation structure is given, i.e. (Wöbbekind et al.,
2013). All that is mentioned here proves the
importance of the dynamic system identification
problem. A genetic algorithm is applied to the
parameters identification problem for ODE (Sersic
et al., 1999), but the structure of the system is given.
A genetic algorithm was also used in the study
(Parmar et al., 2007), in which an order reduction
problem is considered and the model is a second
order linear differential equation. But the
discretization of real values results in a significant
limitation in applicability, and algorithms of this
nature do not satisfy the needs of the considered
identification problem. Another powerful nature-
inspired optimization algorithm, partial swarm
optimization, was applied to nonlinear dynamical
system linearization, (Naiborhu et al., 2013).
Our approach is based on the reduction of the
identification problem to the extremum problem on
the real-value vector space or on the space with real
and integer vector coordinates. The problem
reduction allows the simultaneous estimation of the
coefficients, the initial value and the order of the
differential equation. The objective functional
requires a powerful optimization tool. The results of
previous work allow us to conclude that improved
evolution-based optimization techniques are
workable and reliable tools and can be applied to
this class of optimization problem.
Optimization algorithms were improved; search
operators were designed and implemented. Criteria
for comparing algorithms and estimating efficiencies
were proposed. The performance of algorithms was
investigated and examined on a set of identification
problems.
2 IDENTIFIACTION PROBLEM:
ORDER, COEFFICIENTS,
INITIAL POINT
Let a set
,, , 1,
iii
yut i s , be a sample, where
i
yR
is the dynamic system output measurement
at the time point
i
t
,
()
ii
uut
is a control action and
s
is the size of the sample. In the current
investigation it is supposed that the control function
()ut
is known. It is also proposed that the object to
be identified can be described with a linear
differential equation of unknown order, and its
system state is a solution of the Cauchy problem:
() ( 1)
10
()
kk
kk
ax a x axbut
,
0
(0)
x
x
.
(1)
As can be seen, solving the identification problem
requires the initial value
0
x
if it is necessary to find
a solution in a symbolic form, in the form of a linear
differential equation (LDE). In the case of distorted
observations and/or a small sample size it is a
difficult problem to estimate the coordinates of the
initial value vector and some approaches can result
in significant errors in estimated derivative values.
Thus it is important to develop an approach to
estimate simultaneous initial value coordinates and
the LDE coefficients and order.
It is assumed, that the output data
___
,1,
i
yi s
is
distorted by additive noise
:() 0, ()ED
:
___
() , 1,
iii
yxt i s
.
(2)
where the
()
x
t
function is a solution of the Cauchy
problem (1).
Without loss of generality, one may assume that
the system is described with the following
differential equation:
() ( 1)
10
()
kk
k
kkk
aa
b
x
xxut
aaa
(3)
or
() ( 1)
10
()
kk
k
x
ax axaut
.
(4)
Let m be the order of the LDE, which is assumed to
be limited,
,mM
and ,
M
MN is the parameter
that one can set to limit the maximum order. We
seek the solution of the identification problem as the
LDE, and it is determined with the following
parameters: order
,mM
coefficients
1
10
ˆˆ ˆˆ
,,,
T
m
mm
aa aa R
and initial value
vector
ˆ
(0)
m
x
R . It is proposed to estimate the
adequacy of a model by comparing the sample data
with the solution of the Cauchy problem:
() ( 1)
10
ˆˆˆ ˆˆˆ
()
mm
m
x
ax axaut
,
0
ˆ
(0)
m
x
x
.
(5)
The current problem is the extension of earlier work,
which is focused on LDE order and coefficient
estimation, (Ryzhikov et al., 2013). Our approach
Evolutionary Optimization Algorithms for Differential Equation Parameters, Initial Value and Order Identification
169

meets three ways of LDE determination. The first is
based on the following representation of a solution.
Let a vector
1
10
ˆˆˆˆ
0...0 , , ,
T
M
m
aaaaR
be a
form of determination for both variables m and
ˆ
m
a
.
For the order
m vector
ˆ
a
will contain
M
m
zero
coordinates from the origin. Now when
m is
defined by the variable
ˆ
a
, let
0
ˆ
M
x
R be a vector
of initial value coordinates and
0
ˆ
mm
x
R - its first m
coordinates. Now the identification problem solution
is determined by the values that deliver an extremum
to a functional
1
0
0
0
ˆˆ ˆ
,(0)
,
1
ˆ
(, ) () min
m
M
M
s
ii
aax x
aR x R
i
Iax y xt
,
(6)
where
0
ˆˆ
,(0)
ˆ
()
m
aax x
xt
is a solution of the Cauchy
problem (5) with order
m , coefficients
ˆ
m
a
determined by
ˆ
aa
and initial point
0
ˆˆ
(0)
m
x
x
determined by
0
x
.
Thus, the simultaneous estimation of all the
parameters leads to extremum problem solving on
1
M
M
RR
.
Another method of determination is based on the
assumption that coefficient
b of control function (3)
is not equal to 0. Thus, the same differential
equation can be represented in a different way
() ( 1)
10
ˆˆ ˆ
()
kk
kk
aa a
x
xxut
bb b
,
(7)
() ( 1)
10
ˆˆ ˆ
()
kk
kk
ax a x axut
.
This representation leads to the same optimization
problem (6).
Both solution representations have their
disadvantages, which are related to the impossibility
of transforming the vector into some class of
equations. For the determination based on equation
(4) it is impossible to determine a differential
equation of order
k
with
ˆ
0
k
a
. For the other
method of determination it is impossible to
determine a differential equation with a control
coefficient that is equal to 0.
One more method of determination is based on
the representation of LDE with a vector
1
ˆ
M
aR
and an integer
mM . The integer variable value
sets the order and determines the number of
elements for both vectors
1
ˆ
M
aR
and
0
ˆ
M
x
R .
The criterion for this method of determination is
suggested to be the following:
0
0
ˆˆˆ
(, 1),(0) ( , )
1
ˆ
(, , ) ()
m
zz
s
ii
afam x fx m
i
Iax m y xt
,
1
0
0
,,
(, , ) min
MM
aR x R mM
Iax m
,
(8)
where
dim( ) dim( )
0,
(,): , (,)
,
xx
zzi
i
in
fxn R R fxn
x
in
is a function, that transforms the vectors so its
coordinates that do not fit the order are equal to 0.
The current determination leads to the optimization
problem in
1
:
MM
RRxNxM
.
3 MODIFIED HYBRID
EVOLUTIONARY STRATEGY
ALGORITHM FOR LDE
IDENTIFICATION
Evolution-based extremum seeking techniques are a
useful tool for solving multimodal and complex
black-box optimization problems. This is the reason
the evolution strategy approach was suggested as the
basic one. The evolution strategy optimization
algorithm is widely applied and its efficiency has
been proved. Its principles are described in
(Schwefel, 1995).
Some classes of optimization problems have
specific features, so it is possible to analyse
properties and reveal the way of improving the
techniques that one can use to solve these problems.
Since the proposed functional (6) is complex,
because of the way the LDE order is determined and
parameters and initial values are determined with
one vector, some necessary implementations and
modifications were made to improve the approach
performance. Every alternative is an individual and
is characterized by the value of its fitness. The
fitness function of individual
x
X is a mapping
1
()
1( arg())
fx
I
xI
,
(9)
arg( )
x
I is a transformation of the individual’s
vector coordinates to the arguments of the functional
(6) or (8).
In the current investigation the evolutionary
strategy optimization algorithm was implemented
with the following features: 3 selection schemes:
tournament, proportional and rank; 6 crossover
schemes; 2 mutation schemes.
The crossover operator is determined by one of
the expressions:
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
170

1
1
p
p
n
j
j
s
j
r
n
j
j
wi
i
w
,
(10)
_____
1
,1,
p
q
q
cs p
n
j
j
j
j
w
Pi i j n
w
,
(11)
where
c
i
is an offspring,
s
i is one of the parents,
p
n is the a quantity of parents, w is the weight
coefficients.
Crossover schemes differ in their way of forming
offspring: as a weighted average of its parents (10)
or when every offspring’s gene has the probability to
be equal to one of the parents’ genes.
Here we describe some standard and suggested
methods of weight determination. For the case (10):
1
j
p
w
n
,
j
j
s
wfi
,
(min ,1)
jc
wU
,
(min , ( ))
j
jcs
wU fi
; and for the case (11):
1
j
p
w
n
,
(min , ( ))
j
jcs
wU fi
. In the given
expressions
(,)Uab is a uniform distribution on
,ab
,
min
c
is a crossover parameter that prevents
dividing by 0.
The first essential improvement is the
implementation of a stochastic extremum seeking
algorithm as a searching operator that acts after
standard operators in every generation. The designed
stochastic local optimization algorithm is similar to
the coordinate-wise extremum seeking technique.
The aim of its implementation is to improve
alternatives after the random search. The suggested
local optimization algorithm is controlled by 4
parameters:
1
L
N - the number of individuals to be
optimized,
2
L
N - the number of genes to be
improved,
3
L
N
- the number of steps for every gene,
and
L
h
- optimization step value.
The second modification is related to the
suppressing of the mutation influence. It is an
important point, because the way of transforming the
objective vector into a differential equation makes
the problem very sensitive to even small changes of
the alternative variables. Thus, it was suggested, to
add the probability for every gene to be mutated, so
that one can decrease the mutation by lessening the
value of this setting
m
p
. Let the optimization
problem dimension be
dim( )Nx
, variable
1
...
N
rr r
is randomly distributed for every
individual and
01 , 1
j
mj m
Pr p Pr p
.
Now the mutation operator can be described as
follows, for counter
____
1,jN
0, ,
mcj c
jj jN
iirNi
(12)
0,1
1
N
mjcjc
jN jN jN
iririe
(13)
or
0,1 ,
mcj
jN jN
iirN
(14)
where
____
,1,
m
j
ijN are objective parameters,
____
,1,
m
jN
ijN
are strategic parameters,
is a
learning coefficient,
2
,NE
is a normally
distributed random value with an expected value
E
and a variance
2
.
Another improvement also focused on supressing
the random search influence on the order estimation.
The vector determines LDE order and some of its
coordinates equal zeroes if
mM . However
efficient stochastic optimization algorithms for real
variables are based on adding some random values
to them. This leads to a contradiction. To solve it, a
rounding operator was suggested. One more
parameter sets the threshold level
10
l
t
, so the
rounding operator works as follows
_____
,
,1,
0,
mml
jj
m с
j
iifi t
ijN
otherwise
,
(15)
where
c
N
the number of objective parameters that
transform into ODE coefficients.
For the functional (8) and related transformation,
the modified algorithm was extended to solving
optimization problems with both real and integer
variables. To save the concept of the evolution
strategy algorithm, the integer variable is also
related to its strategic parameter.
Since the single input and single output
identification problem is considered, every
alternative consists of
21
M
real value variables
and one integer. The schemes of the crossover
operator are similar to (11).
Let
c
m
p
be the probability for one integer gene to
mutate. Let
123
,,
mmm
rrr be a random variables:
Evolutionary Optimization Algorithms for Differential Equation Parameters, Initial Value and Order Identification
171

1
01 ,
c
mm
Pr p
1
1
c
mm
Pr p
2
2
01min1,
c
mm
Pr i
2
2
1min1,
c
mm
Pr i
,
and
____
3
1
,1,
m
Pr j j N
N
. The mutation operator
works similarly to (12) and (13):
123 12
11
(1 )
cc
mmmm mmm
irrr rri ,
(16)
1
22
(0,1)
cc
mmmc
iirN
.
(17)
The main benefit of implementing all the
modifications is to achieve a sufficient improvement
of the algorithm efficiency. For the same
computational resources all of these algorithms are
more reliable and more efficient than the standard
differential evolution algorithm, particle swarm
optimization algorithm and evolutionary strategies
with covariance matrix adaptation. The
modifications were designed to lessen the
complexity that arises from the vector-to-model
transformation and the requirements of simultaneous
parameter estimation.
4 PERFORMANCE
INVESTIGATION
To make an investigation of the algorithms and
estimate their performances we need to put forward
criteria. The first criterion is basic and related to the
value (6) for models in forms (7) and (5) and with
value (8) for the approach that includes integers and
real values. To simplify the representation of results,
let
1
C
be the criterion (6) or (8), depending on what
algorithm was used.
Another criterion calculates the distance between
the model output and the real output; we denote it
2
C
. It is also important to calculate the error in LDE
parameter estimation
3
С
, in the case of the real
order being estimated.
1
2
ˆ
() ()
s
t
t
Cxtxtdt
,
(18)
300
ˆˆ
С aa x x
.
(19)
Since criterion (19) is useful only for some class of
solutions, let us put forward one more criterion that
estimates the probability to find the real order
4
co
r
n
С
n
,
(20)
where
co
n
is the number of solutions with the same
order as the real object and
r
n
is the number of
algorithm runs.
The dynamic system output is the Cauchy
problem solution on
0, T
for the LDE with given
coefficients and the initial value. The solution needs
to be discretised and represented as a set with
s
N
elements. Let
s
I
be a set of randomly chosen
different integers, so accordingly to (2),
2
0,
s
i
i
s
IT
yx N
N
and
s
i
i
s
I
T
t
N
, where a
counter
1,is .
The list of differential equations that was used to
simulate the dynamic process is given in table 1. On
the basis of the given differential equations we form
initial problems and generate the observations. The
samples count 100 observations. The list of
problems is given in Table 1.
One faces a difficulty in the examination of
algorithms, caused by a large number of setting
combinations and a wide problem field. The latter
means that optimization problems have many
characteristics themselves and depend on differential
equations that determine the system output, sample
size, noise level and the way random numbers are
generated. Every setting and even every realisation
is a different problem, because the generating of a
sample is a random event.
Due to results of previous works it was decided
to use the following settings in the current
investigation: 100 individuals for 100 populations,
tournament selection, 3 parents for random
crossover, mutation scheme (12) and (14), the
mutation probability
2
m
p
N
,
1
40
L
N individuals
for the local stochastic improvement,
2
50
L
N
genes and
3
1, 0.1
L
L
Nh, the threshold for
rounding
0.4
l
t
. For integer variables the mutation
setting took
1
c
m
p
M
.
The strategic parameter of the initial population
were uniformly generated,
0,1U
, every objective
parameter is equal to 0, the integer variable with
equal probability takes a value from 1 to
M
. The
order limitation value took 10. Every algorithm was
launched 25 times for every identification problem.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
172
The algorithm that is based on the model (5) is
denoted as 1, the algorithm that is based on the
model (7) is denoted as 2 and the algorithm that
estimates the order with an integer variable is
denoted as 3. At first we examine algorithms on the
set of problems in Table 1. Results of the
examination are given in Table 2.
Table 1: Identification problems.
Identification problems
1
2()
x
xxut
,
0
2 0 , 12.5
T
xT
2
2()
x
xxut
,
0
2 2 , 12.5
T
xT
3
2()
x
xxxut
,
0
0 1 0 , 12.5
T
xT
4
2()
x
xxxut
,
0
311 , 12.5
T
xT
5
2()
x
xxxut
,
0
2 0 0 , 12.5
T
xT
6
2()
x
xxut
,
0
01 , 12.5
T
xT
7
37 ()
x
xxut
,
0
3 3 , 12.5
T
xT
8
23 ()
x
xxxut
,
0
111 , 12.5
T
xT
9
(4)
2.2 3.5 ( )
x
xxxxut
,
0
2000 , 12.5
T
xT
10
(4)
2452()
x
xxxxut
,
0
0000 , 12.5
T
xT
11
(4)
43 ()
x
xxxxut
,
0
1000 , 12.5
T
xT
12
(4)
43 ()
x
xxxxut
,
0
2 0 0 0 , 12.5
T
xT
13
(5) (4)
0.6 3.4 1.1 2.4
x
xxxx
0.4 ( )
x
ut
,
0
00000 , 25
T
xT
14
(5) (4)
423
x
xxxx
0.5 ( )
x
ut
,
0
00000 , 25
T
xT
15
(6) (5) (4)
1.5 2 2 0.5
x
xxxx x
0.1 ( )
x
ut
,
0
000000 , 25
T
xT
Average values of criteria show that for the given
problems and samples, algorithm 1 is the most
efficient.
Table 2: Experimental results for different algorithms and
problems from the list in Table 1.
Algorithm
number
Criteria average values
1
C
2
C
4
C
3
C
1 0,045 0,996 0,399 0,441
2 0,059 1,287 3,349 0,453
3 0,057 1,180 0,389 0,252
Algorithm
number
Criteria value variance
1
C
2
C
4
C
1 0,017 0,335 1,246
2 0,007 1,520 3,040
3 0,003 0,566 0,508
Since observations of the system trajectory are
distorted, two more criteria were added. One is
needed to estimate the probability of finding a model
that is better than the system trajectory in fitting the
sample data
5
b
r
n
С
n
,
(21)
where
b
n
is the number of launches in which such
solutions were received. And the last criterion gives
us a difference in
1
C
criterion values for the model
and the object:
61 1
model object
С CC
,
(22)
where
11
model object
CC
and
11
,
model object
CC
are the
criterion values for the model output and the system
output, respectively.
The next examination is related to an estimation
of noise level influence on the performance of the
algorithms. Results for problems 1, 5 and 12 from
Table 1 for different noise levels are demonstrated in
Table 3.
Table 3: Experimental results for different noise levels.
Averaged criteria values. Problems 1, 5 and 12, Table 1.
Alg.
Criteria average values
1
C
2
C
4
C
3
C
5
C
6
C
1 0,195 0,864 0,342 0,364 0,666 0,301
2 0,182 1,018 0,888 0,453 0,866 0,038
3 0,187 1,112 0,308 0,466 0,649 0,014
Alg.
Criteria variance
1
C
2
C
4
C
6
C
1 0,139 0,343 0,818 0,0004
2 0,008 0,251 2,118 0,006
3 0,007 0,209 0,468 0,004
As one can see algorithm 3 is the best for
criterion
2
C
values. But Table 3 shows that
algorithm 1 is still the most reliable: it has the
Evolutionary Optimization Algorithms for Differential Equation Parameters, Initial Value and Order Identification
173
biggest average value of criterion
6
C
. The estimation
of its probability to find a solution that would fit the
observations more than the real system state equals
1. This can be interpreted as this algorithm finding a
solution that fits the sample data even better than the
real system output trajectory.
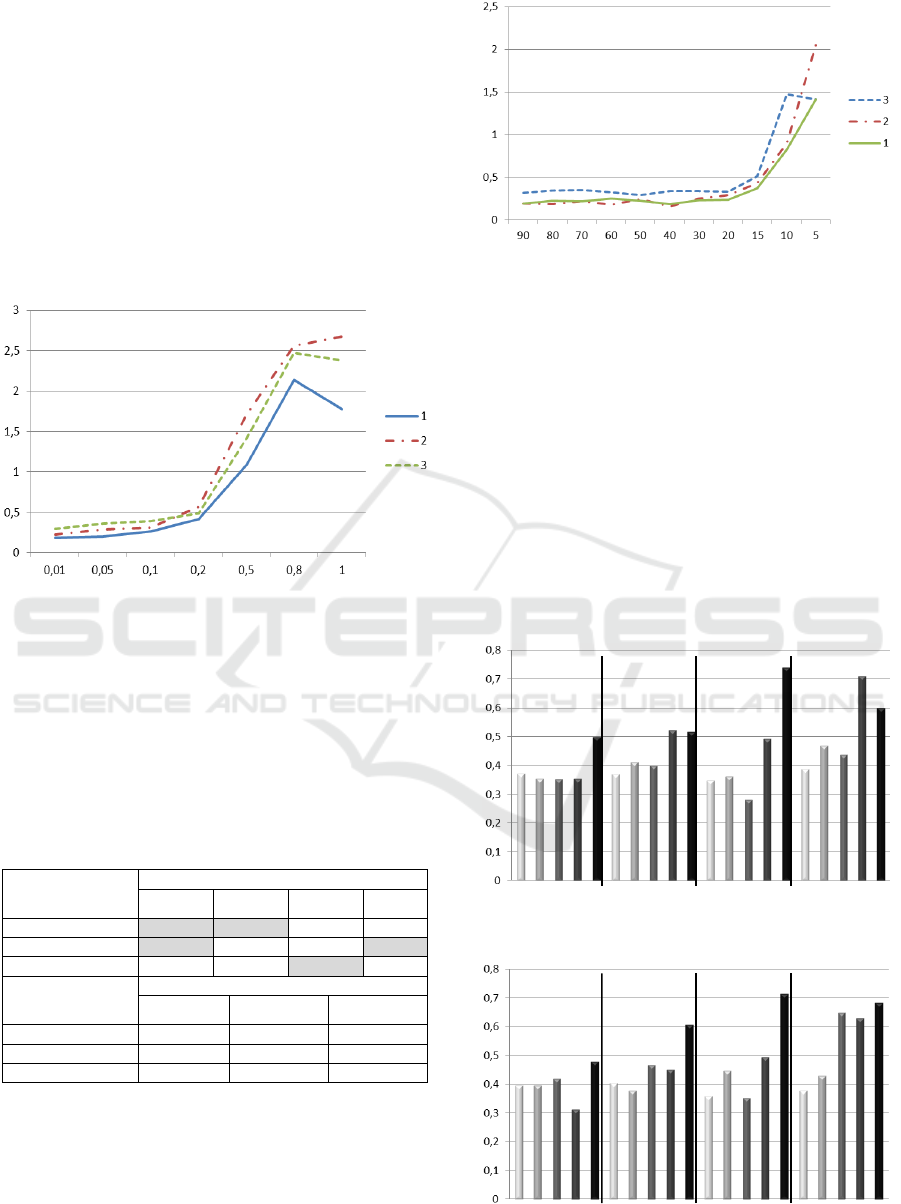
The value that the criterion (18) takes is also
important and is given in Figure 1 – its average
value for problems 1, 5 and 12. In these pictures, the
horizontal axis is the noise level and the vertical axis
is the average value of the criterion (18) for 25
launches.
Figure 1: Problems 1, 5 and 12, criterion (18) average
value for different noise levels.
The next examination aim is to investigate the
effect of the sample size on the algorithm
performance. The sample size was varied from 90 to
5: 90, 80, …, 20, 15, 10, 5. All the average criteria
values are given in Table 4 for problems 1, 5 and 12
and 25 launches of the algorithms.
Table 4: Experimental results for different sample size
values. Problems 1, 5 and 12, table 1.
Algorithm
number
Criteria average values
1
C
2
C
4
C
3
C
1 0,013 0,398 0,596 0,288
2 0,013 0,464 0,502 0,613
3 0,021 0,549 0,286 0,482
Algorithm
number
Criteria variance
1
C
2
C
4
C
1 0,009 0,210 0,408
2 0,014 0,530 0,995
3 0,010 0,440 0,464
A criterion (18) average value for different
sample size is presented in Figure 2.
Figure 2: Problems 1, 5 and 12, criterion (18) average
value for different sample size.
To estimate the influence of both factors: sample
size and noise level, another examination was
performed. The noise level took values 0.01, 0.05,
0.1, 0.2, 0.3 and the sample size was varied: 200,
150, 80, 40. There we consider all three algorithms
for problems 1, 5 and 12. Figures 3, 4 and 5
represent the average values of criterion
2
C
for the
algorithm 1, 2 and 3, respectively. To make a better
presentation of the results, statistics for every sample
size are given in a distinct area in the figures. The
bars represent average values for some sample size
and noise level, differ in colour; the darker colour
matches the higher noise level.
Figure 3: Criterion (18) average value for different noise
levels and sample sizes. Algorithm 1.
Figure 4: Criterion (18) average value for different noise
levels and sample sizes. Algorithm 2.
200 150 80 40
200 150 80 40
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
174

Figure 5: Criterion (18) average value for different noise
levels and sample sizes. Algorithm 3.
Increasing the noise level and decreasing the
sample size leads to a loss in efficiency. However
the estimation of probabilities
3
C
and
5
C
shows us
the algorithms find a good solution. The samples are
not representative, so it is impossible to identify the
real dynamical system. Only the dynamical system
whose trajectory fits the data can be identified.
In this study the criterion (18) was suggested as
being the most important, because it is the
estimation of the output distance of the model from
the real system output. It is used since it is more
useful than criterion
1
C
for samples with noised
data. Yet it is impossible to use this criterion in
solving inverse mathematical modelling problems.
We also suggest that the criterion
4
C
could be used
instead of
2
C
, but it is more difficult to interpret the
results.
5 CONCLUSIONS
The approaches and algorithms described in this
work are proven to be useful for linear dynamic
system identification. The improved optimization
algorithms are powerful and reliable tools for
solving the reduced extremum problem. The
approach allows the inverse mathematical modelling
problem to be solved in a symbolic form knowing
only the control function. Since the approach and
algorithms solve the problem automatically and
simultaneously for all variables, the approach is
flexible. The designed algorithms can be easily
modified to seek solutions in cases where there is no
control input or where the initial value is given.
The developing of the dynamic system
identification problem solving approach requires
some specific criteria for estimating the optimization
algorithms. They are related to the complexity of the
problem and its features. In the current study we
suggested 6 criteria. Criteria allow algorithm
performance to be investigated and more
information about the features of a reduced problem
to be given. The data we received from the
experiments is useful for the further development of
evolutionary algorithms and dynamic identification
problem solving approaches.
New features of the reduced problem were
explored. In the case of no data distortion, the
sample size does not affect the efficiency. The
examination results show that the improved
optimization algorithms find a solution that fits the
sample better than the system output trajectory.
ACKNOWLEDGEMENTS
Research is performed with the financial support of
the Russian Foundation of Basic Research, the
Russian Federation, contract №20 16-01-00767,
dated 03.02.2016.
REFERENCES
Brunel N. J-B., 2008. Parameter estimation of ODE’s via
nonparametric estimators. Electronic Journal of
Statistics. Vol. 2, pp. 1242–1267.
Fang Y., Wu H., Zhu L-X., 2011. A Two-Stage Estimation
Method for Random Coefficient Differential Equation
Models with Application to Longitudinal HIV
Dynamic Data. Statistica Sinica. pp. 1145-1170.
Naiborhu J., Firman, Mu’tamar K., 2013. Particle Swarm
Optimization in the Exact Linearization Technic for
Output Tracking of Non-Minimum Phase Nonlinear
Systems. Applied Mathematical Sciences, Vol. 7, no.
109, pp. 5427-5442.
Parmar G., Prasad R., Mukherjee S., 2007. Order
reduction of linear dynamic systems using stability
equation method and GA. International Journal of
computer and Infornation Engeneering 1:1., pp.26-32.
Peifer M., Timmer J., 2007 Parameter estimation in
ordinary differential equations for biochemical
processes using the method of multiple shooting. IET
Syst Biol, pp. 78–88.
Ryzhikov I., Semenkin E., 2013. Evolutionary Strategies
Algorithm Based Approaches for the Linear Dynamic
System Identification. Adaptive and Natural
Computing Algorithms. Lecture Notes in Computer
Science, Volume 7824. – Springer-Verlag, Berlin,
Heidelberg, pp. 477-483.
Schenkendorf R., Mangold M., 2014. Parameter
identification for ordinary and delay differential
equations by using flat inputs. Theoretical
Foundations of Chemical Engineering. Vol. 48, Issue
5, pp. 594-607.
200 150 80 40
Evolutionary Optimization Algorithms for Differential Equation Parameters, Initial Value and Order Identification
175

Schwefel Hans-Paul, 1995. Evolution and Optimum
Seeking. New York: Wiley & Sons.
Sersic K., Urbiha I., 1999. Parameter Identification
Problem Solving Using Genetic Algorithm.
Proceedings of the 1. Conference on Applied
Mathematics and Computation, pp. 253–261.
Wöbbekind M., Kemper A., Büskens C., Schollmeyer M.,
2013. Nonlinear Parameter Identification for Ordinary
Differential Equations. Proc. Appl. Math. Mech., 13:
pp. 457–458.
Wu H., Xue H., Kumar A., 2012. Numerical
Discretization-Based Estimation Methods for Ordinary
Differential Equation Models via Penalized Spline
Smoothing with Applications in Biomedical Research.
Biometrics, pp. 344-352.
ICINCO 2016 - 13th International Conference on Informatics in Control, Automation and Robotics
176
