Visual Navigation for Rendezvous and Docking using PMD Camera
Ksenia Klionovska and Heike Benninghoff
German Aerospace Center (DLR), Muenchener Str. 20, 82234 Wessling, Germany
1 RESEARCH PROBLEM
There is one common problem of the satellite which
is quite widely discussed: the lifespan. Depending
on the mission the lifespan of large and expensive
geostationary satellites can last about 10-15 years,
whereas the satellites in Low Earth Orbit have
significant shorter life cycles. Therefore an idea to
extend the operational lifetime or improve the
performance of a satellite on the orbit instead of
replacing it by a new one is concluded in On Orbit
Servicing (OOS) projects (Ellery et al., 2008; Stoll
et al., 2009).
The typical scenario of OOS is Rendezvous and
Docking (RvD) of the approaching chaser to the
target and taking over attitude control. There have
been several studies focused on providing OOS
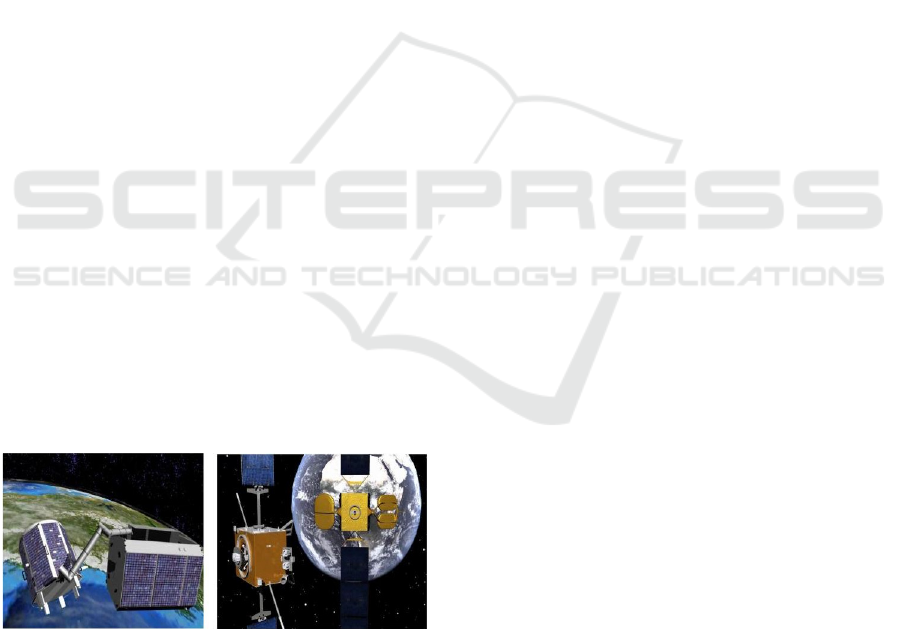
(Figure 1): DEOS (DEutsche Orbital Servicing
mission) for Low Earth Orbit and Smart-OLEV
(Orbital Life Extension Vehicle) for geostationary
orbit. In DEOS like scenarios, a service satellite
approaches a tumbling client in Low Earth Orbit and
uses a robotic manipulator in order to capture the
uncooperative target satellite (Wolf et al., 2012;
Boge et al., 2013). In the OLEV scenario the
servicer satellite will dock with a specific docking
tool to the apogee thruster of client satellite in the
geostationary orbit (Kaiser et al., 2008).
Figure 1: DEOS Servicer capturing a tumbling client
satellite in Low-Earth Orbit (left) and OLEV approaching
a geostationary client satellite (right).
The rendezvous phase starts at the distance
where the navigation process switches from absolute
navigation to the relative navigation. For this
purpose, a variety of 3D-vision rendezvous and
docking approaches based on laser scanners, stereo
vision, structured light and LIDAR (LIght Detection
And Ranging) has been developed. In 2000, the new
product Photonic Mixer Device (PMD) camera
appeared at the market as a new sort of the 3D Time-
of-Flight (ToF) sensor which, moreover, has never
been used in space environment (Schilling and
Regoli, 2011). The main feature distinguishing PMD
cameras from the above described systems is the
following. A PMD camera emits modulated light to
derive by phase shift a distance measurement for
every pixel. The PMD technologies are rather new
and have some drawbacks. A general problem of the
PMD sensors is a limited distance range due to the
measurement principle. Also an output data provided
by PMD sensor is affected by many factors and quite
noisy with different side effects. These side effects
cannot be neglected, as they influence the system
performance. Therefore, further research in this
direction with a prerequisite for the future to use
PMD camera in space environment is of great
interest to date.
2 OUTLINE OF OBJECTIVES
The main focus of this work is to investigate the use
of a PMD camera for motion detection and pose
estimation with regard to space applications. During
the research phase the following points are
considered:
Initial pose estimation with a subsequent real-
time object tracking.
Extension of the measurement range of the PMD
sensor. In a work of Tzschichholz (Tzschichholz,
2014), the measurement range was extended with
an appropriate algorithm up to 75 m.
Data preprocessing. Camera calibration.
Performance measurements with a RvD
simulation facility like EPOS 2.0 (European
Proximity Operations Simulator)
This paper mainly focuses on the first objective,
pose estimation with a PMD sensor.
Klionovska, K. and Benninghoff, H.
Visual Navigation for Rendezvous and Docking using PMD Camera.
In Doctoral Consortium (DCGISTAM 2016), pages 3-7
3
3 STATE OF THE ART
As it was already mentioned, the use of a PMD
camera for space applications for visual navigation
is of interest up to date. Therefore, there is no
variety of prototypes of ToF cameras. However,
some have been applied and tested under quite
realistic space environment. Tzschichholz
(Tzschichholz, 2011) and Schilling (Schilling and
Regoli, 2011) used PMDTec 19 k for pose
estimation and motion prediction of the spacecraft.
Later, Tzschichholz (Tzschichholz, 2014) applied a
newer model of a ToF camera, the PMDTec
CameCube 3.0, used in conjunction with a CCD
camera for rendezvous and docking.
3.1 Available ToF Cameras
The previous prototypes of the PMD cameras have a
low resolution of the sensor chip and camera
measurements are subjected to external influences.
Especially the pixels of a sensor are oversaturated
under strong illumination of background light.
Table 1: Available ToF cameras and their relevant
properties.
Camera
Resolution
[pixel]
Max. range
[m]
Field of view
Argos 3D,
Bluetechnix
Group
GmbH
160 x 120
352 x 288
up to 10
Indoor,
up to 3
Outdoor
30°,60°,90°
110°
iZ™ OIVS-
1000,
United
Kingdom
1280×1024 0.5-10 15°, 30°,60°
Fotonic,
Sweden
160 x 120 0.15 - 10
70º x 53º
45º x 34º
Ifm,
O3D303,
Germany
176 X 132
64x50 64x16
up to 30
Indoor
60°x45°
40° x 30°
Since the science in different fields moves
forward and new technologies are developed, it was
rationally to start exploring new hardware devices
with more ameliorated characteristics. Products with
their characteristics, which could be presently
purchased from companies, are depicted in Table 1.
For future tests and experiments, we intend to use
the Argos 3D sensor with a resolution of 352 x 288
pixels and with a field of view of 30°.
3.2 PMD Principal
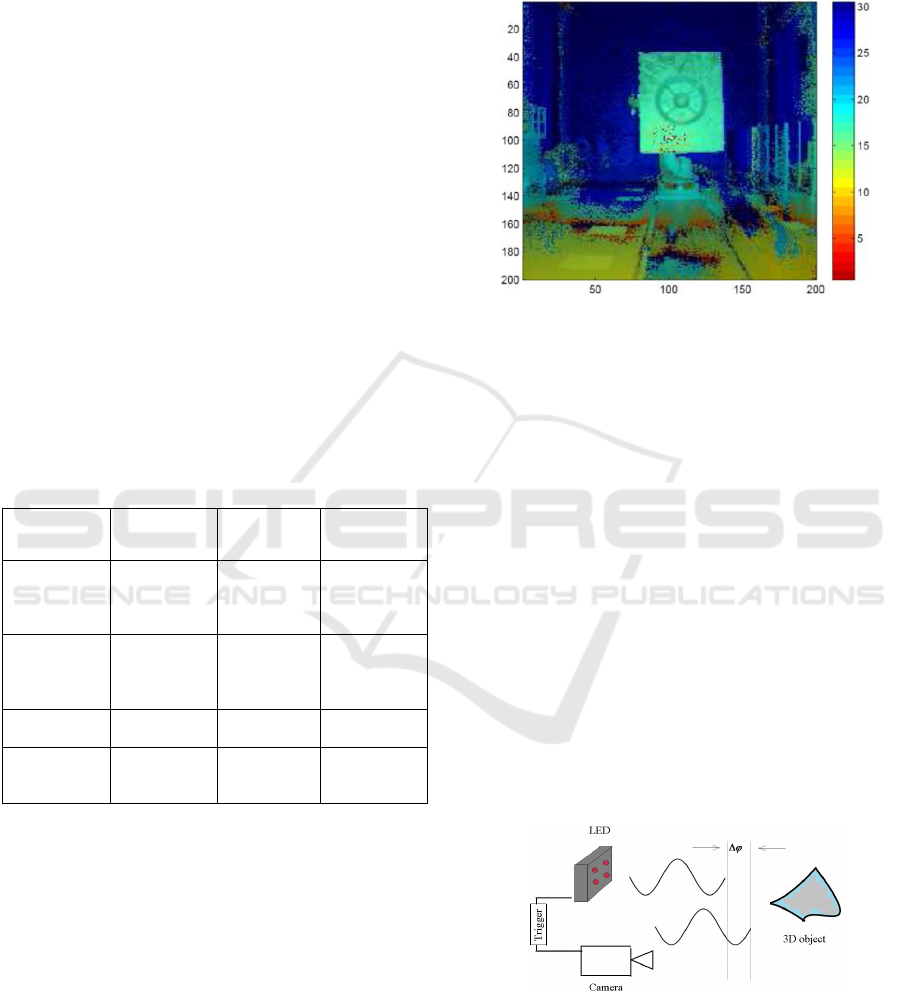
PMD camera is a ranging imaging system, based on
the time-of-flight principle (Boge et al., 2013). The
camera measures the distance to the object for every
pixel of its sensor chip. Figure 2 depicts the distance
measurements, where color indicates distance in
meters.
Figure 2: 3D image obtained with PMD camera showing a
satellite mockup in EPOS laboratory.
The target area is illuminated by incoherent
modulated light (LED or laser diodes), where the
wavelength of the light source has to be
synchronized with the spectral sensitivity of the
detector. ToF cameras usually employ NIR light in
range of 780nm to 850nm (Fuchs, 2012). In order to
reduce the impact of the background illumination, it
would be also practically to use a narrow band-pass
filter. The light is reflected by the scene, collected
by the lens system of the camera and projected onto
the sensor matrix. The distance from the target is
calculated by correlation of the received modulation
light with the modulation signal of the illumination
unit, where the phase shift corresponds to the
distance. Noise from the background light can be
suppressed by the Suppression of Background Light
(SBI) circuitry but SBI cannot be controlled by
software. In the Figure 3, the functionality of the
PMD principal is depicted.
Figure 3: Measurement principal of the PMD camera.
4 METHODOLOGY
Before calculating the pose estimate, the problem of
DCGISTAM 2016 - Doctoral Consortium on Geographical Information Systems Theory, Applications and Management
4

actually finding target must be solved. The
initialization need not be accurate. The coarse
capture of the model is sufficient for the further
tracking process. In work of Tzschichholz
(Tzschichholz, 2014),
the author uses the amplitude
channel of the PMD camera to locate the target
object in image-space and then expands a point
cloud in 3D space from a bootstrap point. The
resulting point cloud provides a centroid, which is
used to determine the translational components of
the relative pose. A sequential probing of all the
model surfaces to the point cloud provides the planar
orientation of the matching model surface, and
finally, the determination of the principal
components of the measured point cloud provides
the rotation about the normal vector, what completes
the initial relative pose estimate. The algorithm
suggested by Tzschichholz has one drawback,
namely it does not reliably determine all six degrees
of freedom of a symmetric object without additional
hints to the initializer. The hints are some pieces of
information which allow the initializer to narrow
down the set of possible poses until only one pose
remains.
The key idea of the matching method is quite
simple: features found in the image are matched
against the set of features in the model. The
algorithm proposed in this paper is addressed to the
free-form 3D objects and discussed in section 5.
4.1 Related Work
To this date, many techniques have been developed
for the purpose of object recognition and pose
estimation using 3D data with the focus to find a
robust and efficient manner to identify objects in a
scene.
This can be done in various ways, depending
on the format of the scene: camera image, range
image, or a combination of both.
One standard
approach for object pose estimation is the
Iterative
Closest Point (ICP) method. The ICP algorithm
needs a good initial estimate and is thus not suitable
for initial object detection, but often used as a
subsequent pose refinement step after the object is
detected (Haarbach, 2015).
The techniques for detecting free-form models
could be divided in two groups: global methods and
local methods (Drost et al., 2010).
4.1.1 Global Methods
The idea of global methods is to not divide a model
into parts or any geometrical objects. Instead, the
complete model is used. To initialize objects the so-
called Generalized Hough Transform is suggested in
(Rabbani and van den Heuvel, 2005) but it is limited
to primitive objects as the recognition of 6 degrees
of freedom (DoF) is computationally too expensive.
Another automatic routine based on random
sample consensus (RANSAC) to find basic shapes
with point cloud input was designed in (Schnabel et
al., 2007). The input data is a set of observed values,
sampled and deconstructed in a model which can be
fitted to the observation. The inliers are generated
from random subset of the original data and tested
against entire set of data in order to determine
correlation between inliers and data set. The
algorithm is proved to be simple and easy to
implement for the primitive shapes but for complete
objects it would not be the best solution.
4.1.2 Local Methods
A second class of methods, local methods, uses so-
called point descriptors. The scheme of this type of
algorithms identifies point to point correspondence
between model and the scene. Point correspondence
is built by comparing descriptors of the scene and of
the model. Therefore, the descriptors must
accurately and robustly distinguish between cluster
and noise.
Mian (Mian et al., 2006) built a three-
dimensional tensor from multiple unordered range
images. The tensors are stored in a hash table and
used like a lookup table during the matching phase.
In (Johnson, A. and Hebert, M., 1999) Johnson and
Hebert introduce a recognition algorithm based on
surfaces’ correspondence by matching points using
the spin image representation. Spin images from
points on one surface (model) are constructed and
stored, the same procedure is done with the spin
image of scene surface. Best point correspondence is
then established and grouped for the further surface
matches.
5 CONTRIBUTION
Object recognition, pose estimation and navigation
for the RvD demand factors such as accuracy,
robustness and also computing speed. The approach
outlined below addresses the problem of estimation
of the 6 DoF object pose (3D position and 3D
orientation) using PMD camera measurements in
cluttered point clouds. Prior knowledge of the
geometry of the object (e.g. a given CAD model or
any other 3D model) is needed to be known.
The method developed in the thesis is the
Visual Navigation for Rendezvous and Docking using PMD Camera
5
following: A global model description is created
using an oriented point feature. It is matched with
the measurement data by using a fast voting scheme,
similar to the Generalized Hough Transform (Drost
et al., 2010). An oriented point is a three-
dimensional vertex with a directional vector (normal
vector). Consequently, point pair feature describes
the relative position and orientation of two oriented
points. Global model description consists of all
model point pair features (single four-dimensional
vector
). Vector
is determined as follow:
F
m
m
i
,m
j
‖
d
‖
,∠
n
i
,d
,∠n
j
,d,∠n
i
,n
j
(1)
where d is difference between two points,
‖
‖
represents Euclidean distance, the second and third
components are angles between the vector d and the
point normal vector
and
, respectively.
Equal point pair features grouped together in
order to reduce dimension of the hash tables for
voting process. An object, in general, is represented
as a set of feature vectors spaced in a hush table for
the further simple retrieval. Random points should
be sampled from the PMD data and each pair votes
for a particular pose. The pose which collects the
most votes belongs to the required pose. In order to
increase the accuracy of the estimated pose, we
suggest to apply at the previous step the hierarchical
clustering algorithm, for example, Agglomerative
Clustering, and to group together similar poses.
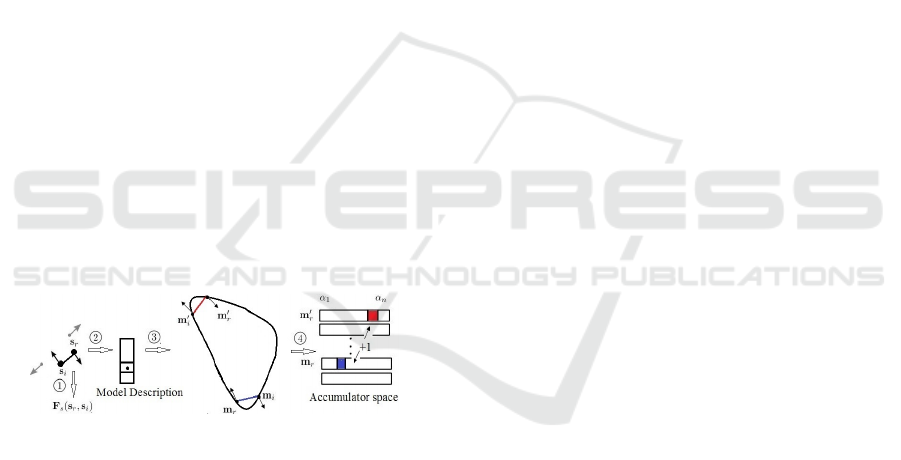
Figure 4: Visualization of the steps in proposed algorithm.
The similarity of the poses is determined by
comparison with a predefined threshold for rotation
and translation components. The method consists of
the following steps (cf. Figure 4):
1. Let
∈ denote points of the scene and
∈
points of the model. The reference point
is
paired with all other points of the scene S and
their feature
,
is calculated using the
same principal as for vector
.
2. The global model description consisted of all
model point pair features
,
is
calculated and generated in an offline phase.
Feature
is matched to the global model
description, which output is a set of point pairs
on the model M that have similar distances and
orientations.
3. For every point pair of the model matched to the
point pair of the scene, the local coordinate α is
calculated. The rigid motion from the model
space into the scene space can thus be described
by a point on the model and a rotation angle α.
4. After α is calculated, the vote is casted in a so-
called accumulator space, which is similar to a
hash table.
5.1 Expected Outcome of Algorithm
As the algorithm for pose initialization and
estimation of the 6 DoFs is still in investigation
phase, it is expected that the novel algorithm
achieves significant improvement compared to the
method of Tzschichholz (Tzschichholz, 2014) in
terms of efficiency, stability and accuracy. Once a
pose estimate is available, the next step is planned to
develop an approach for tracking the target for static
and dynamic cases.
6 EXPECTED OUTCOME
In this chapter some description of the additional
research objectives is given.
6.1 Data Preprocessing
Before the delivered data from PMD sensor can be
used for navigation tasks, the camera should be
calibrated. For this, the following effects and issues
must be taken in account when calibrating a PMD
camera (Tzschichholz et al., 2011):
fixed pattern noise,
amplitude dependent distance offset,
Wiggling effect,
integration time dependent distance error,
motion artifacts.
6.2 Extension of Measurement Range
of PMD Sensor
Usually, in PMD cameras the modulation frequency
can be tuned accordingly with regard to the needs of
the user or the application. Lower modulation
frequencies allow larger measurement ranges. There
are also methods which can extend the measurement
range of the PMD camera, for example, by using
two or more modulation frequencies (Tzschichholz,
2014). Therefore, an appropriate approach in
DCGISTAM 2016 - Doctoral Consortium on Geographical Information Systems Theory, Applications and Management
6

accordance with a new PMD camera’s
characteristics is a part of the study.
6.3 Performance Measurements with
EPOS Facility
In order to ensure safe and reliable rendezvous and
docking on the orbit by OOS, the processes must be
analyzed and simulated under utmost realistic
conditions with respect to space environment. For
this purpose, simulations and tests of the PMD
camera and the navigation algorithms will be
performed using the European Proximity operations
simulator (EPOS 2.0), a new simulation facility
located at DLR, Oberpfaffenhofen, for this purpose.
It is a hardware-in-the-loop simulator which
comprises two industrial robots for physical real-
time simulations of rendezvous and docking
maneuvers (Boge et al., 2013). For such hardware-
in-the loop RvD simulation, a client satellite mockup
is mounted on one robot of the EPOS facility and the
PMD camera is mounted on the second robot.
The
PMD camera measures the relative position and
attitude of the client satellite and the onboard
attitude and orbit controller calculates on this basis
the necessary thrusters or reaction wheel commands.
7 STAGE OF THE RESEARCH
At the moment study and investigation of the
intended algorithm for pose initialization and
estimation described in section 5 are conducted.
Intermediate steps are implemented and tested using
a Matlab toolbox. In parallel, the process of
collecting data from the new purchased sensor for
subsequent conduction of experiments is ongoing as
well as decimation procedure for the raw data from
the PMD camera.
REFERENCES
Boge, T., Benninghoff, H., Tzschichholz, T., 2013.Visual
Navigation for On-Orbit Servicing Missions. 5th
International Conference on Spacecraft Formation
Flying Missions and Technologies.
Choi, C.,Taguchi, Y., Tuzel, O., Liu, M-L., Ramalingam,
S., 2012. IEEE International Conference on Robotics
and Automation (ICRA.).
Drost, B., Ulrich, M., Navab, N., Ilic, S., 2010. Model
Globally, Match Locally: Efficient and Robust 3D
Object Recognition. IEEE Conference Computer
Vision and Pattern Recognition (CVPR.)
Ellery, A., Kreisel, J., Sommer, B., 2008. The case for
robotic on-orbit servicing of spacecraft: spacecraft
reliability is a myth. Acta Astronautica 63(5-6).
Fuchs, S., 2012. Calibration and Multipath Mitigation for
Increased Accuracy of Time-of-Flight Camera
Measurements in Robotic Applications. Dissertation,
Technical University of Berlin.
Haarbach, A.,2015. 3D Object Reconstruction using Point
Pair Features. Bachelor’s thesis, Technical University
of Munich.
Johnson, A., Hebert, M., 1999. Using Spin Images for
Efficient Object Recognition in Cluttered 3D Scene.
IEEE Transactions on pattern analysis and machine
intelligence, vol. 21 , no. 5.
Kaiser C., Sjöberg, F., Delcura, J. M., Eilertsen, B., 2008,
SMART-OLEV – An orbital life extension vehicle for
servicing commercial spacecrafts in GEO, Acta
Astronautica 63.
Lonsberry, A., 2012. Fast recognition and pose estimation
for the purpose of bin-picking robotics. Master thesis,
Case Western Reserve University, USA.
Mian, A,S., Bennamoun, M., Owens, R., 2006. Three-
Dimensional Model-Based Object Recognition and
Segmentation in Cluttered Scenes. IEEE Transactions
on pattern analysis and machine intelligence, vol. 28,
no. 10.
Rabbani, T.,van den Heuvel, F., 2005. Efficient Hough
Transform for Automatic Detection of Cylinders in
point Clouds. ISPRS WG III/3, III/4, V/3 Workshop
"Laser scanning 2005", Enschede, the Netherlands.
Schilling, K., Regoli, L., 2011. The PMD 3D-camera for
Rendezvous and Docking with Passive Objects. In 8
th
International ESA Conference on Guidence,
Navigation& Control Systems.
Schnabel, R., Wahl, R., Klein R., 2007. Efficient
RANSAC for Point-Cloud Shape Detection. The
Eurographics Association and Blackwell Publishing.
Stoll, E., Letschnik, J., Walter, U., Artigas, J., Kremer, P.,
Preusche C., Hirzinger, G., 2009. On-orbit servicing.
IEEE Robotics & Automation Magazine 16(4).
Tzschichholz, T., 2014. Relative pose estimation of known
ridged objects using a novel approach to high-level
PMD-/CCD- sensor data fusion with regard to
applications in space. Dissertation, University of
Würzburg, Germany.
Tzschichholz, T., Ma, L., Schilling, K., 2011. Model-
based spacecraft pose estimation and motion
prediction using a photonic mixer device camera. Acta
Astronautica 68, (2011).
Wolf, T., Reintsema, D., Sommer, B., Rank, P., Sommer,
J., 2012. Mission DEOS – Proofing the Capabilities of
German's Space Robotic Technologies. International
Symposium on Artificial Intelligence, Robotics and
Automation in Space–i-SAIRAS.
Visual Navigation for Rendezvous and Docking using PMD Camera
7
