
PID Parameter Setting of Servo System
based on Genetic Algorithm
Xia Quan-guo, Song Jun and Wang Mao-lin
92941 Unit, huludao, Liaoning, China
Keywords: Servo Control System, PID Controller, Genetic Algorithm, Error Functional Integration.
Abstract: In traditional servo control system design, heuristic algorithm is usually adopted to get PID controller
parameters. This kind of method consumes long time, needs higher practical work experience, and depends
on empirical formula or statistical data. So it is difficult to get good control performance. According to the
principle of genetic algorithm, this paper determines optimization range with generalized Hermite -Biehler
theorem, and designs the target function by error functional integration evaluation index. MATLAB
simulation results show that the setting method is simple and practical, and can get a better control
characteristic than the traditional methods
1 INTRODUCTION
The setting of controller parameters mainly
influences two aspects: control quality and
robustness of control system. PID controller is
simple and practical, has certain robustness to model
error, so it’s widely applied to the servo control
system. For the performance of control system,
optimization design and setting of PID controller
parameters are crucial. Heuristic algorithm is usually
adopted to get PID controller parameters for
previous servo control system; this kind of method
often has “semiempirical” color. First of all, initial
parameters of controller are calculated according to
empirical formula or based on some statistical charts,
then PID controller parameters are debugged with
the method of experiment plus heuristic algorithm,
so as to get the expected control performance(REN
Ting, JIAO Zi-ping, XU We-ke,2009) .This kind of
method is time consuming, needs debugging
personnel to have more practical work experience,
and relies on empirical formula or statistical data; it
is difficult to obtain.
Genetic algorithm is a kind of search method for
global optimal probability evolved by referring to
the evolution law of biosphere (genetic mechanism
of survival of the fittest). It was firstly proposed by
American Professor J. Holland (Holland J H, 1975)
in 1975; after Goldberg (Goldberg D E, 1989) gave
the basic framework of genetic algorithm,
widespread interest was aroused in the field of
control and this method has been widely used in
control field, such as system identification, PID
control, optimal control, self-adaptive control, robust
control, intelligent control, etc. There are two key
technologies to use genetic algorithm to optimize
and set PID controller parameters: one is constrained
optimization space. Searching appropriate
constrained optimization space is directly related to
optimization efficiency and results. There is no
physical background for controller parameters
themselves, so it’s difficult to determine the
appropriate scope. Considering that the optimization
design goal of controller parameters is that control
system meets certain index requirements under the
circumstance of guaranteeing the stability of control
system, this paper adopts generalized
Hermite-Biehler theorem to determine the
optimization space. The other is reasonable target
function. Genetic algorithm measures search effect
through fitness function value, which is transformed
from target function, and target function reflects the
actual control requirements, so target function is a
key to the success of algorithm; target function is
designed with error functional integration evaluation
index by comprehensively considering the
requirements of control system, control deviation
tending to zero, fast response speed, small overshoot
and short rise time.
7
Mao-lin W., Quan-guo X. and Jun S.
PID Parameter Setting of Servo System based on Genetic Algorithm.
DOI: 10.5220/0006018100070010
In Proceedings of the Information Science and Management Engineering III (ISME 2015), pages 7-10
ISBN: 978-989-758-163-2
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
7
2 SERVO CONTROL SYSTEM
MODELING
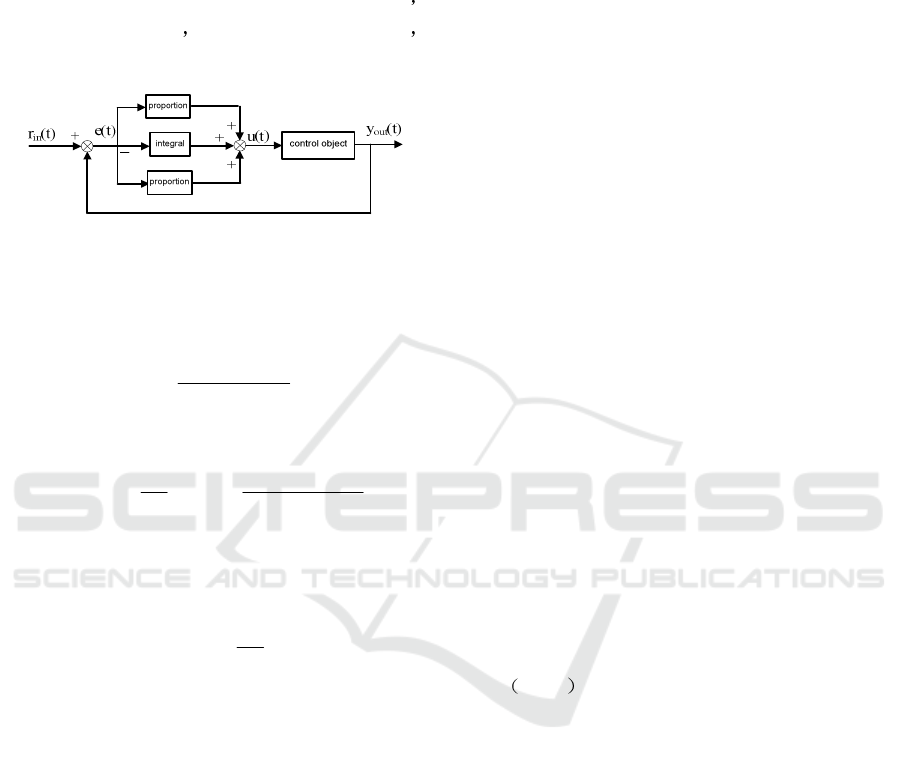
The structure diagram of servo PID control system is
as shown in Fig. 1; of which,
)(tu
is control input
)(te
is error signal
)(trin
is input quantity
)(tyout
is output quantity.
Figure 1: Structure diagram of servo system.
Take the transfer function of controlled object to
be(
Xu Wenke,Jiao Ziping,Yu Bobiao, 2010
)
s
s
sG
p
+
=
2
095
.
0
22.92
)(
(1)
The transfer function of PID controller is
s
ksksk
sT
Ts
ksG
ipd
d
i
pc
++
=++=
2
)
1
1()(
(2)
In the formula:
p
k
is proportionality coefficient;
i
T
is integral time constant;
d
T
is differential time
constant;
i
p
idpd
T
k
kTkk == ,
.
3 SETTING OF PID CONTROL
PARAMETERS WITH GENETIC
ALGORITHM
3.1 Problem Description
For given controlled object, seek a group of PID
controller parameters
dip
kkk ,,
to make the error
functional integration evaluation index of controlled
system is minimum; target function is used to
calculate error functional integration evaluation
index and fitness function can be transformed from
target function.
3.2 Stability Domain Calculation
In the optimization design of servo control system,
first of all, system stability shall be guaranteed.
System stability domain refers to the defined range
of
dip
kkk ,,
, closed-loop characteristic polynomial
is
)22.9222.92
)22.921(095.0)(
23
ip
d
ksk
skss
++
++=
σ
(3)
Formula (3) is Hurwitz, i.e. all the roots of
polynomial is in open left half plane. Using
generalized Hermite-Biehler theorem to calculate the
stability domain of control system, we can get the
range of
, ,
p i d
k k k
:
]2,0[],2,0[],5,0[ ∈∈∈
idp
kkk
3.3 Selection and Realization of Target
Function
Target function reflects the actual control
requirements; the quality index in the process of
transition will make sense only under the given input
of zero initial condition and unit step. When the
given signal is not a unit step function, quality index
in the process of transition will lose its meaning.
Moreover, not always single control signal is
inputted to the control system, there is also other
interference, so it’s necessary to build a more
common and generalized quality index evaluation
function, which is called performance index
integration evaluation, which takes instantaneous
error
)(te
function of control system as functional.
In numerous error functional integration evaluation
indexes, which on earth is the best choice? Through
analysis and comparison on the practicability
(whether engineering practical value and calculation
are convenient) and selectivity (the bigger, the better
for the change of index with the change of parameter)
of above performance indexes. So many literatures
take ITAE performance index as the optimal
performance index for single input single output
control system and self-adaptive control system, and
it has been widely used. In addition, considering
from another way of thinking, once a functional is
chosen as the performance index of control system,
the corresponding performance index is given to the
design system. For example, the minimum quadratic
integral functional is applicable to the control system
taking minimum energy consumption as the
performance index; minimum error absolute value
ISME 2015 - Information Science and Management Engineering III
8
ISME 2015 - International Conference on Information System and Management Engineering
8
integral is applicable to the control system taking
minimum fuel consumption as the performance
index; minimum integral of error absolute value
multiplied by time is applicable to the control system
taking fast speed and stability as the performance
indexes.
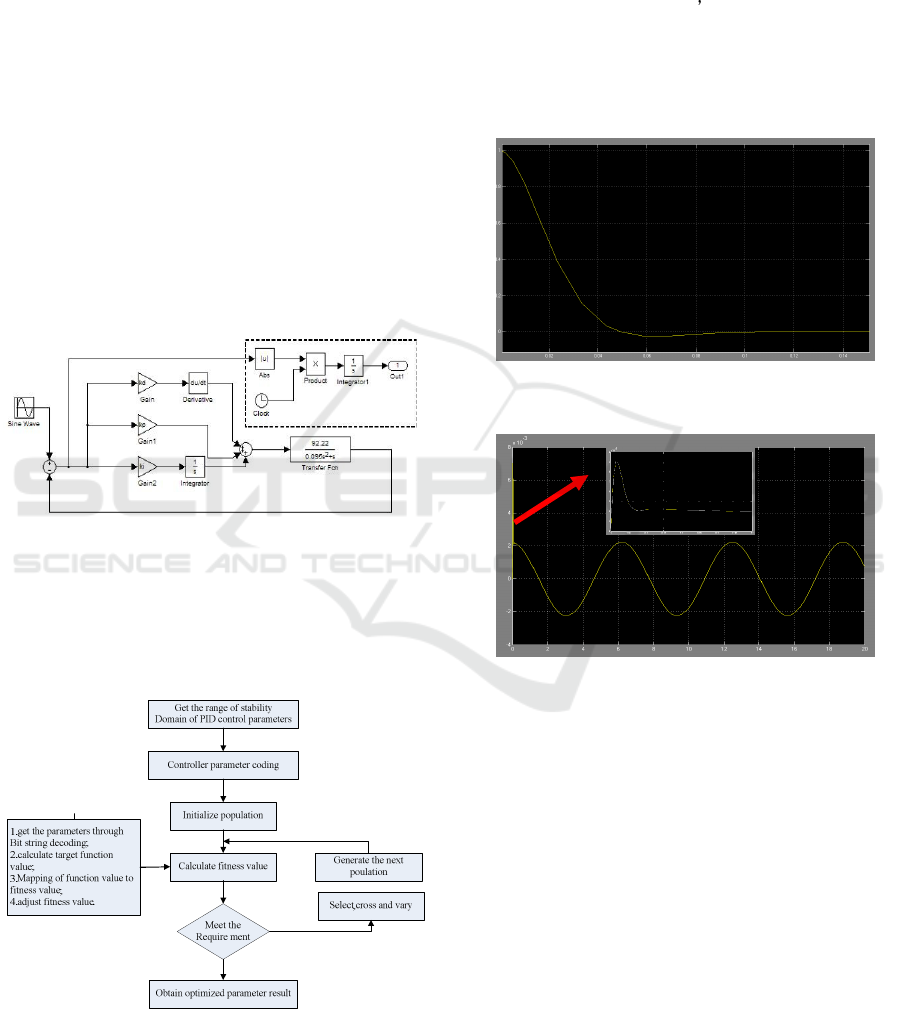
By making use of the advantages of convenient
debugging for M file programming in Matlab and the
visualization of SIMULINK and being easy to build
complex models, system model and ITAE index
function value generation module are established in
SIMULINK; through the port relationship between
M file and SIMULINK module, M file realizes
automatic modification of controller parameter and
the corresponding ITAE index value is obtained
through simulating calculation under this parameter
by calling SIMULINK model of the system. The
diagram of control system and ITAE index function
value generating SIMULINK module is as shown in
Fig.2.
Figure 2: Control system and ITAE index function value
generating SIMULINK module.
3.4 Algorithm Flow Block Diagram
PID control parameter setting process based on
genetic algorithm is as shown in Fig. 3
Figure 3: PID control parameter setting process based on
genetic algorithm.
4 SIMULATION RESULT
Simulation is conducted by making use of MATLAB
genetic algorithm toolbox and evolutionary search
convergence begins after the 58th generation, the
optimal values kp = 4.884 9 kd = 0.084 36 and ki =0.
084 36 are obtained. To test the control effect of
controller, simulation is conducted to tracking error
of control system in two kinds of typical input
signals including step and sine, system tracking error
curves are as shown in Fig 4 and Fig.5.
Figure 4: Curve of system tracking error to step signal.
Figure 5: Curve of system tracking error to sinusoidal
signal.
We can see from simulation experiment results that
servo system has fast response speed and small
overshoot; its control deviation tends to zero.
5 CONCLUSION
In this paper, genetic algorithm is applied to the
setting of PID controller parameters in servo system.
According to the principle of genetic algorithm, first,
generalized Hermite-Biehler theorem is used to get
the stability domain of PID controller parameters,
which not only guarantees the stability of the system,
but also determines the optimization space of the
algorithm; then, according to the control
requirements of servo system, the paper puts forward
PID Parameter Setting of Servo System based on Genetic Algorithm
9
PID Parameter Setting of Servo System based on Genetic Algorithm
9

the target function taking ITAE performance index
as the algorithm; finally, the feasibility and
effectiveness of the method is verified by simulation.
This method can provide engineering guidance for
engineering design personnel and it has certain
engineering application value.
REFERENCES
Ren Ting, JIAO Zi-ping, XU We-ke, 2009. The journal.
Satisfactory PID Controller Design of Naval Gun
Servo System. Journal of Gun Launch & Control, 4:
55-57,65
Holland J. H., 1975.Adaptation in natural and artificial
systems.Ann Arbor University of Michigan Press. Ann
Arbor .
Goldberg D. E., 1989.Algorithms in Search, Optimization
and Machine Learning.New York.
Xu Wenke, Jiao Ziping, Yu Bobiao, 2010. Application of a
Hybrid Fuzzy Controller to Naval Gun S- ervo System.
Ship Electronic Engineering, 8: 186-188,198.
ISME 2015 - Information Science and Management Engineering III
10
ISME 2015 - International Conference on Information System and Management Engineering
10
