
Library for Simplified Timer Implementation using Standard C++
Sérgio F. Lopes, Paulo Vicente and Ricardo Gomes
Centro Algoritmi, School of Engineering, University of Minho, Guimarães, Portugal
Keywords: Temporization, Timers, C++11, Computer-based Control, Event-driven programming.
Abstract: Temporization is a crucial aspects of control, automation and robotics systems. C++ is used in the
development of such systems, especially if they are more complex and powerful. Because, the language and
standard library do not support non-blocking timers with callbacks for event-driven programming,
developers resort to libraries and frameworks that offer such functionality. However, their timer
implementations are dependent on platform specificities and thus have more limited portability. C++11 has
introduced features that enable standard implementations of timers. We propose a library that implements
timers with simplified usage relatively to well-known libraries. The proposed library is contrasted with
timers of two well know libraries, through a series of usage scenarios. We describe the design and provide
performance measurements. The results show that it is faster and offers more accurate temporization.
1 INTRODUCTION
Time is a crucial aspect of control, automation and
robotics systems. The complexity of such systems
has increased, and many of them are increasingly
based on more powerful computing platforms and
software development environments that support
C++ programming language. In fact, C++ has been
used in embedded systems and other resource-
constrained types of programming for a long time
(Stroustrup, 2005), because it allows handling
software complexity while retaining predictability
and performance.
Time-related tasks can be divided in two kinds.
One is to measure the time that it takes an activity to
complete (or a phenomenon to occur). The result is a
time interval that is calculated at the end, and we
refer to it as (time) counting. The other is to wait a
known amount of time before performing an action
(or to wait for an event to happen). We hereafter
designate it as temporization, and its result is the
execution of the pre-configured action after (or the
potential event reception during) the specified time
interval.
Counting is widely supported by standard
libraries’ functions that read some form of clock,
while temporization can be implemented in diverse
ways. Simple approaches include: (1) stop the
program/thread using some blocking sleep-like
function, not being able to do anything else; and (2)
to constantly pool and measure time wasting CPU
time and energy. Naturally, these are unacceptable
hypotheses. Suitable approaches include the use of
system specific asynchronous IO, multithreading
and synchronization primitives. These are not at the
preferred level of abstraction for developing
complex applications, and they do not allow the
productivity levels necessary for large programs.
For the abovementioned reasons several C++
libraries, include a feature, usually called a timer,
which supports temporization providing a simpler
API. However, we have tried some well-known
libraries and still wished for, and could think of, an
easier to use interface and different functionalities.
Moreover, those libraries depend on platform
specific code and their usability is limited to the
targeted platforms.
C++11 (ISO/IEC 2011) introduced many
relevant features to C++, including the thread
support and time utilities libraries. Yet, timers were
not included, not even in the latest version of the
language, C++14 (ISO/IEC 2014). From the time
when most widely used compilers started to offer
extensive support for C++11’s standard library
features, it became possible to start developing
portable solutions for temporization in C++.
The main contribution of this paper is a new
timer library, implemented exclusively in C++.
Therefore, it can be used in all platforms for which
there are C++ development environments, more
F. Lopes S., Vicente P. and Gomes R..
Library for Simplified Timer Implementation using Standard C++.
DOI: 10.5220/0005575205170524
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 517-524
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

specifically those supporting C++11’s thread and
chrono libraries (Josuttis, 2012). We argue that this
library’s timers offer an easier and more advanced
API comparatively to two other important timer
libraries. Besides functional advantages, the
proposed library also surpasses the others in terms of
temporization performance.
In the following section we review related work.
In section III, two widely used libraries are analysed
from the perspective of a varied set of usage
scenarios. At the same time, we present how those
scenarios can be supported by an easier to use API.
Section IV describes the proposed library and
performance measurements. Finally, we present
conclusions and future work.
2 RELATED WORK
We are interested in a timer that waits a given
interval of time without blocking the program, and if
it is not stopped before that interval expires (i.e.,
timeout event occurs) it calls a pre-configured
function. We refer to such a function as callback,
and it is executed asynchronously to the rest of the
program. Therefore, it is an event-handler as found
in event-driven programming environments.
In our search we were able to find several C++
libraries that include timers. As mentioned in the
previous section, all of them depende on platform
specific code, i.e., they are not based on C++11
standard library.
In the low-level library (Mitchell, 2013), the
developer is responsible for implementing the events
loop. The specific event-driven design of (The Qt
Company 2015) applies to timers, whose events are
dispatched as all others, and timers can only be
controlled from the thread that creates them. In
(Robinson, 2013), timer callbacks are executed by
the thread that dispatches events, thus blocking other
(timer) events. These event processing limitations
are not found in (Henning, 2004; King, 2009). In
(Henning 2004), timers are implemented by deriving
a base class and a thread is launched for each timer
object. In (King 2009) there is a thread dedicated to
process all timers, which launches one thread to
execute each callback.
Two other libraries are reviewed in more detail
since they are used in the following section. Boost is
a large and important collection of C++ libraries that
has had a major influence on C++ standard
evolution. It includes Asio (Kohlhoff, 2014), a
library that supports timers. When an Asio timer is
created an io_service is associated to it. One or more
callbacks are attached to a timer by using its
async_wait function. The time interval starts at timer
creation, and the io_service::run function blocks if
invoked before the interval end, otherwise it
executes the callbacks. Consequently, Asio timers
requires the addition of multithreading to obtain
asynchronous temporization as defined in the
previous section. It is a lower-level library.
Poco (Applied Informatics Software Engineering
2010) is also a collection of libraries that offers two
kinds of timers. One is the Poco::Util::Timer, which
similarly to a Java timer works as a timed task
scheduler, executing callbacks in sequence. The
other one is Poco::Timer, from the main library, that
is closer to the one proposed in this paper, whose
model is described in the previous section. Although
the former can be used according to that model, we
hereafter consider the latter. The timer is created by
specifying a start interval and a periodic interval.
Callback objects are created from user classes using
the TimerCallback template, which allows using any
user function that has the first parameter of type
Poco::Timer. The callback object is then passed to
the timer using its start function, which begins the
temporization. If the timer is not stopped before
expiry, the callback is executed by an internal pool
of threads.
3 TIMER USE CASES
This section discusses the implementation of
solutions to temporization scenarios using Asio and
Poco. At the same time, our view of an easier to use
API is anticipated.
3.1 Single Temporization
In this scenario the timer is started once to execute a
given callback when it expires.
In consequence of the general description of
Asio timers previously given, it is necessary to
create a thread to avoid blocking the main thread.
Asio callbacks must be void and accept as first
parameter an error code. The code in figure 1
considers a callback that also receives an integer
number, for example purposes. Consequently,
async_wait needs a binding of the extra arguments.
After expiration and callback execution, the
io_sevice::run function returns and ends the thread.
The Poco implementation is given in figure 2, in
which timer arguments specify, respectively, the
start and periodic intervals. The callback function
must be void and have only one parameter of the
type Timer. If the developer needs more data in the
callback, that data can be included as (a) member-
variable(s) of UserClass, to be accessible from the
member-function used as callback. In fact, the
callback cannot be a global function.
While Asio uses C++11 standard time types that
allow any units, Poco uses long integers in units of
milliseconds. Another fundamental aspect is that
Poco uses an object-oriented approach, requiring
callbacks to be member-functions, while Asio allows
also global functions. Clearly, Asio offers a lower-
level of abstraction.
The periodic interval parameter of Poco Timer
adds unnecessary complexity to non-periodic timers,
and it has a special value (zero, meaning non-
periodic) which must be remembered. Both interval
parameters could be of double (instead of a long)
type, and allow for higher resolution timers.
The instantiation of UserClass and
TimerCallback to build a callback object can be
simplified if the callback function’s name is
predefined. In our view, a callback object should
clearly assume its role (Reenskaug 1996), which
could simply be an interface with a member function
that callback objects must implement. This way,
only one object would need to be created. (Poco also
allows this, but it requires the implementation of two
functions.)
Finally, dividing the temporization setup in two
functions (constructor and start) is more error prone
if the same timer is used for different
temporizations. We prefer to unite the timer setup,
namely configuring the callback along with the
interval. An interface such as the one illustrated in
figure 3 would be slightly simpler.
3.2 Periodic Temporization
In this scenario the timer executes a callback at a
constant rate or frequency. This is relevant, for
example, for cyber-physical systems’ sensing and
actuation tasks since digital control theory assumes
fixed input/output rates.
Asio does not support the concept of a periodic
timer. It can be implemented by repeatedly starting a
timer after expiration. A good place to do this is in
the callback itself, by passing to it as arguments the
timer and period. The code is shown in figure 4, and
the timer start up is achieved in the same way as in
figure 1. To avoid accumulation of eventual delays
between periods, the next expiration is calculated
from the (previous) expiration time (using function
expires_at without arguments), instead of from the
present time. The timer is restarted using expires_at
with the new expiration time as argument.
This use-case shows more clearly that Asio plays
in a different abstraction level, involving
considerably more work (i.e., calculate next timeout,
restart timer and insert callback). Still, we continue
to analyze it because C++11 imported many
functionalities from Boost and that may probably
happen again in future versions.
Poco offers timers that expire periodically and
// callback function is:
// void func(const system::error_code& ec,
// int* anArg);
io_service io;
high_resolution_timer timer1( io,
std::chrono::milliseconds(500));
int anArg = 10;
auto bound_cb = bind( func,
placeholders::error,
&anArg);
timer1.async_wait(bound_cb);
auto bound_th = bind(
&io_service::run,
&io);
thread thread1(bound_th);
Figure 1: Start an Asio timer and wait for expiration.
Timer timer1(100, 0);
UserClass obj;
TimerCallback<UserClass> cb(obj,
& UserClass::func);
timer1.start(cb);
Figure 2: Start a Poco timer and wait for expiration.
UserClass cbo;
Timer timer1(0.1, cbo);
timer1.start();
Figure 3: Preferred timer start and wait for expiry.
void funcPeriodic (
const system::error_code& error,
high_resolution_timer* timer,
std::chrono::milliseconds period)
{
if (!error) {
auto nextEnd =
timer->expires_at() + period;
timer->expires_at(nextEnd);
timer->async_wait( bind(
funcPeriodic,
placeholders::error,
timer,
period));
// callback actions go here
} else if (error !=
error::operation_aborted) {
// handle error
}
}
Figure 4: Callback for a periodic timer using Asio.

the code to implement one differs from figure 2
solely in the first line. In the example of figure 5, we
consider the case wherein the timer has a first
interval different from the period. In such case, the
previously discussed complexity of Poco having a
parameter that separates the period from the first
interval pays off. However, when the developer
needs a periodic timer with all intervals equal, it has
to provide the same amount twice. An alternative
could be to specify that the single temporization
interval is to be repeated until the timer is stopped.
This could be achieved in the preferred API of figure
3, by adding a Boolean argument to the second line.
3.3 Stop Temporization and Restart
This use-case reflects the need to detect the timeout
of an event that should occur several times or
repeatedly (e.g., a security keypad stroke). The timer
is stopped because the expected event has occurred,
and later on, after the handling work is done, the
timer is started to repeat the temporization.
3.3.1 Non-Periodic Timer
To stop an Asio timer, its cancel function must be
called, which triggers the execution of all pending
callbacks passing them an error value that indicates
the timer was stopped. It is up to the programmer to
correctly handle this situation, namely to distinguish
it from a common expiration. Since the callback(s)
are executed in another thread, and depending on the
amount of computation done between stop and
restart, the io_service may or may have not stopped
(i.e., completed the execution of callbacks(s)). If it
does, it must be reset and executed in a new thread,
as exemplified in figure 6.
The implementation with Poco is shown in figure
7. The timer restart requires providing once more to
start function the correct/same callback object. This
is the only hindrance to be straightforward. It would
be preferable to memorize the callback object and
avoid putting that responsibility on the programmer.
3.3.2 Conditional Stop and/or Restart
The previous section assumes that either the timer
has not expired before the stop or the restart is
unconditional. In another possible situation, the
timer could only be (stopped and/or) restarted if it
had not expired, because an expected event occurred
in time.
To detect whether an Asio timer has expired or
not, it is as simple as checking the positive value
returned by the cancel function: if it is 0 the timer
has already expired (and, naturally, cancel has no
effect), otherwise it has not expired. So, the stop
operation is automatically conditional, and to
perform a conditional restart is straightforward.
Poco does not provide information about the
timer state, and thus another mechanism is necessary
to measure the time elapsed since start. This can be
implemented using C++11 chrono library or another
Poco utility, the Stopwatch class, which is illustrated
in figure 8. With the exception of the conversion of
Stopwatch units to milliseconds, all code should be
self-explanatory.
Since a separate time measurement mechanism
must be used with Poco, it is not synchronized with
timer functions and the precision of timer state
detection is degraded. More importantly, a race
condition arises between the thread “running” the
timer (expiration event) and the thread controlling it
(stop invocation), preventing correct operation. In
contrast, Asio cancel function offers both
functionalities atomically, and, consequently, it
corresponds to the preferred API.
3.3.3 Periodic Timer
Periodic timers can also be subject of this use-case,
whenever their action needs to be halted for some
time.
In Asio, implementation concerns are roughly
the same as for the non-periodic timer (in section
3.3.1). The difference is that if the stop instruction
(cancel function invocation) occurs in between the
expiration and periodic restart (made in the callback,
see figure 4), the timer will not stop. This code span
timer1.cancel();
// computations between stop and restart
timer1.expires_from_now(
std::chrono::milliseconds(500));
timer1.async_wait(bound_cb);
if(io.stopped()) {
io.reset();
thread1.join();
thread1 = thread(bound_th);
}
Figure 6: Stop and restart the Asio timer of figure 1.
timer1.stop();
// computations between stop and restart
timer1.start(cb);
Figure 7: Stop and restart Poco timer of figure 2.
Timer timer2(50, 100);
// create callback and start as in fig. 2
Figure 5: Periodic timer using Poco.

forms a critical section that cannot be protected
using synchronization primitives, because it includes
both code internal to Asio (io_service loop
dispatching callback execution) and user code (timer
restart in the callback). To ensure the timer is
stopped, it is necessary to stop the io_service and
wait for its thread exit. Consequently and relatively
to section 3.3.1, the stop procedure is more complex,
but it puts the io_service and thread in a known
state, making the restart procedure simpler, as shown
in figure 9.
When a Poco timer is stopped, it loses the
periodic interval setting and, thus, it is necessary to
reset it, as illustrated in figure 10. The programmer
has to perform that extra step and to use/maintain the
same interval in two code places. Like in section
3.3.1 for the callback setting, it would be preferable
to remember the periodic interval, simplifying the
job and reducing the liabilities of the programmer.
The resulting code would be the same as for the non-
periodic timer in figure 7.
3.4 Restart (without Stopping)
A use-case similar to the previous is to restart the
timer without stopping it, or conversely the stop is
immediately followed by the start. In this case, we
consider only the variant wherein a non-periodic
timer is restarted if not expired.
Figure 8: Detect if the Poco timer of figure 2 has expired
or not.
Figure 9: Stop and restart an Asio periodic timer (i.e., with
the callback of figure 4).
Figure 10: Stop and restart the periodic Poco timer of
figure 5.
Using Asio, the implementation is almost identical
to the one given for the restart procedure in figure 6:
the difference is that the value returned by
expires_from_now invocation (which has the same
meaning as that of cancel function) is used to make
all other steps conditional.
As explained in section 3.3.2, a supplementary
mechanism is necessary to find out if a Poco timer is
still running. Moreover, the start function has no
effect on timers in running state, and restart function
is only applicable to periodic timers. Therefore, as
shown in figure 11 (assuming the counter is started
as illustrated in figure 8), it is necessary to stop the
timer and then start it again.
In contrast with Poco, a preferable API would
allow to simply call a restart function without having
to provide settings (callback and interval) that the
timer already has. To implement a conditional
restart, timer state detection must be done atomically
with it (as explained in section 3.3.2 for the stop
operation). Therefore, a restartIfRunning function
returning success/failure information could be
provided, as illustrated in figure 12.
3.5 Suspend and Resume
In this use-case a timer is suspended and later
resumed to wait for the remainder of the interval.
This is pertinent whenever the waiting operation
must not be restarted every time an expected event
occurs, but the time spent processing those events
must be subtracted from the total waiting time.
Naturally, this scenario only applies to timers that
are running. Moreover, it is more relevant for non-
periodic timers and, therefore, we analyze only that
circumstance.
The Asio implementation is similar to the stop
and restart use-case (in section 3.3.1, figure 6): the
difference is the need to measure the remaining time
“when” the timer is stopped, and pass it as a new
interval to expires_from_now (see figure 13).
Figure 11: Restarting the Poco timer of figure 2, using the
counter of figure 8.
Stopwatch counter;
counter.start(); // next to timer start
// ...
// next to timer stop
long elapsed_tm = counter.elapsed()/1000;
if(elapsed_tm <
timer1.getStartInterval()) {
// timer has not expired yet
timer1.cancel();
if (!io.stopped()) {
io.stop();
thread1.join();
}
// computations between stop and restart
timer1.expires_from_now(
std::chrono::milliseconds(500));
timer1.async_wait(bound_func);
io.reset();
thread1 = thread(bound_th);
timer2.stop();
timer2.setPeriodicInterval(300);
timer2.start(cb);
long elapsed = counter.elapsed()/1000;
if(elapsed < timer1.getStartInterval()) {
timer1.stop();
timer1.start(cb);
}
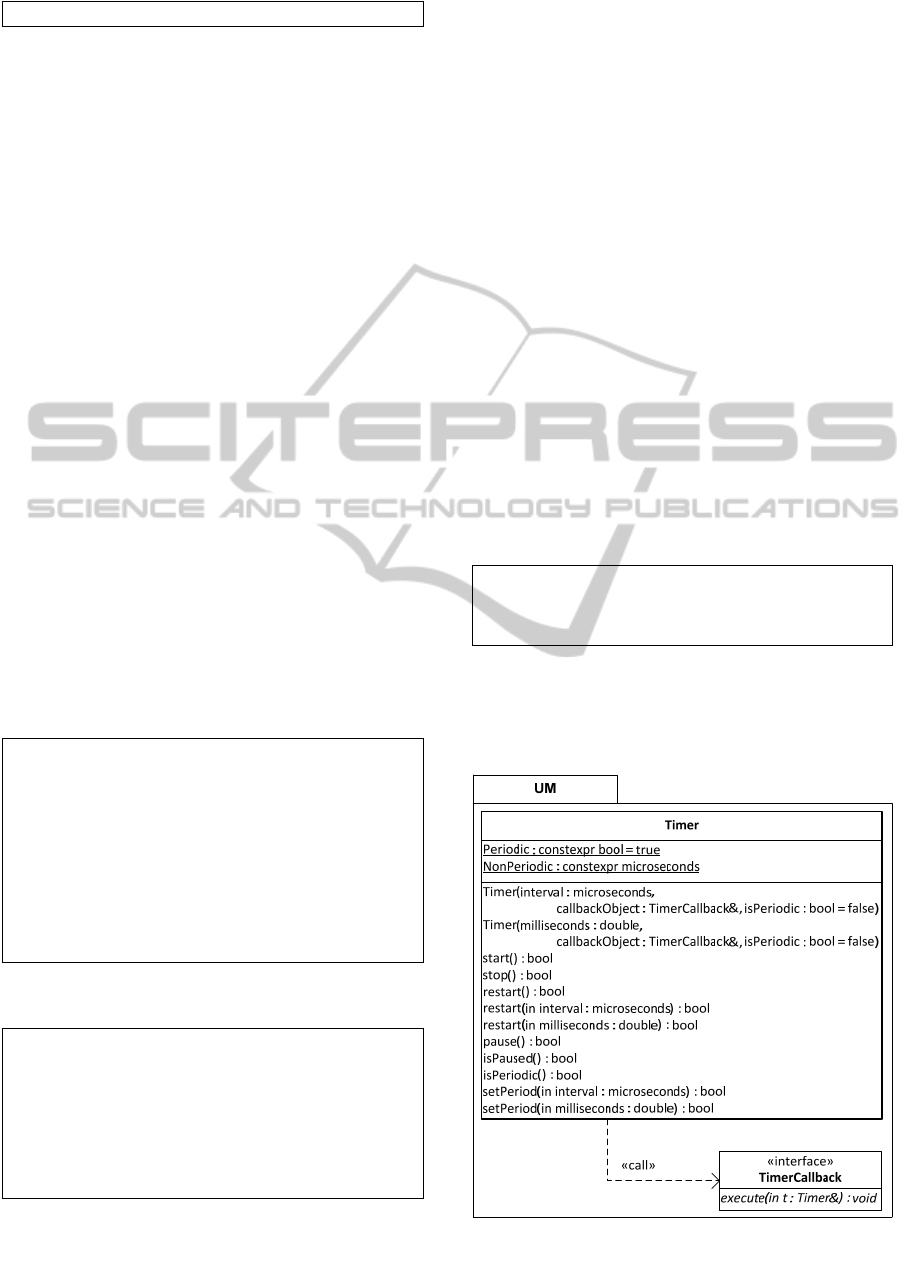
Figure 12: Preferable API for conditionally restarting the
timer of figure 3.
The Poco implementation differs from stop and
restart use-case (see figure 7) in the same way Asio
does. The remaining time is configured by the
setStartInterval function, as exemplified in figure 14.
The separate counter necessary to measure it the
elapsed/remaining time (explained in section 3.3.2),
may (due to unavoidable imprecision) incorrectly
restart a timer that has just expired.
Neither Asio nor Poco distinguish pause from
stop, not offering direct support to suspend timer
waiting. With both libraries it is necessary to resort
to stop and start, incurring in the complications
discussed in section 3.3.1, in addition to the ones
discussed in this section. In a preferable API,
suspending and resuming a timer should be as
simple as it is shown in figure 15.
4 PROPOSED TIMER LIBRARY
4.1 Alignment with Previous Discussion
The proposed timer is based on the preferable API
that is described in previous section. The timer
library is defined in the namespace UM, and consists
of Timer class and the TimerCallback interface, as
depicted in UML class diagram of figure 16.
Any user class can be used to create callback
objects, by implementing the TimerCallback
interface and putting the timeout handling code in
the execute function. Multiple callbacks supported
by Asio can also be implemented within the execute
function of the callback object, namely calling
functions from other objects, either synchronously or
asynchronously launching threads.
The Timer class provides methods to support all
use-cases analyzed in the previous section.
Concretely, it offers:
constructors that allow to create timers using
any C++ time units, including the helper
duration types already offered in the standard
library (i.e., microseconds, milliseconds, etc.);
start and stop functions supporting single and
periodic temporizations (respectively, in
sections 3.1 and 3.2), and stop and restart use-
cases (in section 3.3); and,
pause function supporting the suspend action
of the suspend and resume use-case (in section
3.5).
timer1.restartIfRunning();
if(timer1.cancel() > 0) {
auto remaining =
timer1.expires_from_now();
// compts. between suspend and resume
timer1.expires_from_now(remaining);
timer1.async_wait(bound_cb);
if(io.stopped()) {
io.reset();
thread1.join();
thread1 = thread(bound_th);
}
}
Figure 13: Suspend and resume Asio timer of figure 1.
timer1.stop();
long remaining_tm =
timer1.getStartInterval() –
counter.elapsed()/1000;
if(remaining_tm > 0) {
// compts between suspend and resume
timer1.setStartInterval(remaining_tm);
timer1.start(cb);
}
Figure 14: Suspend and resume the Poco timer of figure
2, using the counter of figure 8.
if (timer1.suspend()) {
// compts between suspend and resume
timer1.resume();
}
Figure 15: Preferable API to suspend and resume timer
of figure 3.
Figure 16: Class diagram of UM Timer library API.

4.2 Differences from Previous
Discussion and Beyond
A constant expression (functionality introduced in
C++11) was defined to allow an explicit creation of
periodic timers, as exemplified in figure 17.
In section 3.4, a restartIfRunning function is
suggested to atomically implementing the
conditional restart. However, such a function is not a
common approach in timer APIs, and the same
effect can be achieved with existing functions.
Concretely, it is implemented using the stop
function, that (similarly to Asio cancel) returns true
if the timer is running, and then doing a restart, as
illustrated in figure 18.
Besides avoiding an additional function, the
aforementioned solution is also related to another
design choice, which is more fundamental. This
choice is the cause for the absence of a resume
function, to be used along with pause function.
Figure 19 demonstrates how the suspend and resume
use-case is supported using the start function to
resume waiting for the remaining time. This is so
because start distinguishes a paused timer from a
stopped timer. More formally, start is a causal
function, because it regards the timer state, whereas
restart does not. In fact, the concept of restarting can
be identically applied to a procedure whether it is
stopped, paused or under way. From a causal
perspective, starting a running timer makes no sense,
and thus UM::Timer start has no effect. Therefore,
the design decision to make start causal and restart
non-causal is coherent and it is also aligned with the
common notions of start and restart. Finally, both
the causal and non-causal functions facilitate the
management of timers that are shared among
threads, by reducing the number of if-else statements
that are necessary.
UM::Timer also offers restart functions with an
interval argument, which enable to either start a
timer with an interval different from the preceding
run or to change the interval of an ongoing
temporization (which is not possible in Poco as
explained in section 3.4). The former case is useful,
for instance, to implement repetitive timers with
variable periods, for example to wait a variable
backoff period before retrying an authentication that
has failed. Repetitive timers can be implemented
easily by restarting them in the callback itself. It
should be noted that such an approach is more
complicated with both Asio (as discussed in section
3.2 for periodic timers) and Poco (which requires a
periodic timer, whose callback restarts the timer
with a different intervals).
Less importantly, but as a matter of flexibility,
UM timers have two setPeriod functions that enable
to convert them from non-periodic to periodic, and
vice-versa. For example, the former conversion can
be used to support periodic timers with a different
first interval, as Poco does (see section 3.2). This is
implemented with a non-periodic timer that is later
converted to periodic. The latter conversion is
supported using another constant expression –
NonPeriodic – to avoid special values and make it
explicit/clear.
5 PERFORMANCE RESULTS
We have done a series of comparative tests to
measure the performance of the three discussed
libraries, using Asio version 1.10.1 (Boost 1.55) and
Poco version 1.3.6, with the GNU g++ 4.8.2
compiler, on a Pentium D915@2.8GHz machine
running Linux kernel 3.16. The tests were repeated
100 times and the average values are presented in
tables 1 - 3.
The first test consisted in starting a timer and
stopping it after 50ms, measuring the time it took
from before start to after stop (external interval),
from after start to before stop (internal interval), and
reading the elapsed interval “of the timer”. In Poco,
the elapsed interval cannot be obtained, and in Asio
it is the difference from timer interval and remaining
time. The results are shown in table 1. UM timer has
almost no difference between all three readings,
showing that both start and stop functions perform
faster and the timer is more consistent with the
externally measured values.
The second test consisted in letting the timer run
to expiration and measure the elapsed time in the
callback. More specifically, we measured the time
if (timer1.stop()) {
timer1.restart();
// ...
Figure 18: UM::Timer API to restart a timer without a
critical section.
if (timer1.pause()) {
// compts between suspend and resume
timer1.start();
}
Figure 19: Suspend and resume an UM::Timer.
UserClass cbo;
Timer timer1(0.1, cbo, Timer::Periodic);
Figure 17: UM::Timer API to create a periodic timer.

from before start to callback entry (callback-external
interval), from after start to callback entry (callback-
internal interval), and the elapsed interval reported
by the timer (for Asio, it is the difference between
the expires_at() value and the before start instant).
The results are shown in table 2. UM::Timer offers
the more precise temporization.
The third test consisted in restarting a timer if it
was running. The time measured was the duration of
the complete restart operation, and the results are
shown in table 3. The results show once more that
UM::Timer is faster and that Poco restart is more
than 3 times slower.
6 CONCLUSION
Timers are an important feature for developing
software interacting with the physical world. This
paper proposes the UM::Timer library that offers a
simpler API. To our knowledge, this is the first timer
library implemented exclusively in standard C++
and, therefore, usable in all development
environments supporting C++ and its threading
library.
We have analysed a set of use-case scenarios,
covering a wide variety of temporization needs,
which show the functional advantages of UM timers.
We also discuss non-functional characteristics of the
proposed library. This includes a set of tests that
show that it performs better than two widely known
libraries, namely in terms of speed, precision and
consistency.
Future work includes the study of an
implementation based on a thread pool, aiming to
augment its efficiency and possibly its performance.
This will be validated by more in depth tests, namely
measuring CPU time and memory usage. Since C++
provide the means to control its threads scheduling
using platform specific mechanism, this work may
also be extended with real-time dedicated
functionalities.
ACKNOWLEDGEMENTS
This work has been supported by FCT - Fundação
para a Ciência e Tecnologia in the scope of the
project: UID/CEC/00319/2013.
REFERENCES
Applied Informatics Software Engineering GmbH 2010,
Multithreading: Doing things in parallel with POCO,
Available from: <http://pocoproject.org/slides/130-
Threads.pdf>. [10 February 2015]
Henning, M. 2004. A New Approach to Object-Oriented
Middleware. IEEE Internet Computing.
ISO/IEC 2011, Information technology – Programming
languages – C++, ISO/IEC 14882:2011.
ISO/IEC 2014, Information technology – Programming
languages – C++, ISO/IEC 14882:2014.
Josuttis, N. M. 2012, The C++ standard library: a tutorial
and reference, 2nd ed, Addison Wesley Longman.
King, D. E. 2009. Dlib-ml: A Machine Learning Toolkit.
Journal of Machine Learning Research.
Kohlhoff, C.M. 2014, Boost.Asio. Available from:
<http://www.boost.org/doc/libs/1_57_0/doc/html/boos
t_asio.html>. [9 February 2015]
Mathewson, N. 2012, Fast portable non-blocking network
programming with Libevent. Available from: <http://
www.wangafu.net/~nickm/libevent-book/TOC.html>.
[9 February 2015]
Mitchell, S. 2013. SDL Game Development, Packt
Publishing.
Reenskaug, T., Wold, P., Odd, A.L., 1996, Working with
objects: The OOram Software Engineering Method,
Manning Publications/Prentice Hall.
Robinson, M. 2013. Getting started with JUCE, Packt
Publishing.
Schmidt, D. C. and Huston, S. D. 2003. Systematic Reuse
with ACE and Frameworks, Addison-Wesley Longman.
Stroustrup, B. 2005, ‘Abstraction and the C++ Machine
Model’, in Embedded Software and Systems. eds Z.
Wu, C. Chen, M. Guo & J. Bu, Springer Berlin
Heidelberg, LNCS, pp. 1-13.
Stroustrup, B. 2014, Programming – Principles and
Practice Using C++, 2th Edition, Addison-Wesley.
The Qt Company 2015, Qt. Available from: < http://www.
qt.io/application-development/>. [9 February 2015]
Table 1: Average intervals (in ms) for stopping a timer
50ms after start.
External Internal Elapsed
Asio
53.6
50.7 51.5
Poco
55.6
51.2 –
UM
51.5
51.3 51.3
Table 2: Average intervals (in ms) for the expiration of a
100ms timer.
Callback
external
Callback
internal
Timer
elapsed
Asio 103.2 100.6 102.1
Poco 103.0 99.9 –
UM 101.8 101.7 100.9
Table 3: Average intervals (in µs) for restarting a timer.
Asio Poco UM
Restart 351 1326 287
