
Towards a Unified Platform for Agent-based Cloud Robotics
Francisca Rosique, Pedro Sánchez, Diego Alonso and Juan Antonio López
Systems and Electronic Engineering Division (DSIE), Universidad Politécnica de Cartagena, Cartagena, Spain
Keywords: Teleo-reactive, Agents, Cloud, Robotics, Drone.
Abstract: This paper describes a platform that aims to design, build, and validate a new generation of cloud robotic
platforms that enable agent-based intelligent control of robots deployed in unknown and dynamic
environments. The platform will consider: (1) novel techniques for programming reactive plans and robotic
behaviours through missions and novel mechanisms for building new behaviours from existing ones, both
for experienced and non-expert users; (2) novel multi-layered cloud platform as the infrastructure to
maintain a continuous link between the robots acting on a physical environment and their agent
counterparts, to provide sensor data from robots to agents, and to provide high-level autonomous decisions
from agents to robots.
1 INTRODUCTION
Intelligent agents are autonomous and heterogeneous
entities that can perceive their environment and are
able to achieve tasks on their own or
collaborating/competing with other agents (Russell
and Norvig, 2003). Agent technology advances can
be helpful in the robotic areas providing capabilities
such as planning, learning and decision-making
(Thrun et al., 2005), (Kaminka, 2012). Distributed
robotic applications can be more easily obtained
considering robotic devices as avatars of virtual
agents (Dipsis, 2010). These agents can use Teleo-
Reactive (TR) programs to support flexible agent
control, high-level goal achievement, and
collaboration between robots (Benson and
Nilsson, 1995), (Clark and Robinson, 2014).
Traditionally, robotic developers have to set up
multiple computing layers to begin building an
application. From identifying a server, installing the
Operating System, to deciding on programming
languages and running preliminary testing. It is
anything but simple. It needs a team of experienced
developers to make the solution work. In this
context, we propose a unified platform for agent-
based cloud robotics (Robotic Agents in the Cloud -
RAC) that will leverage the knowledge and
capabilities needed for developing such systems.
RAC will abstract away from almost all of this
through the development of a cloud-based execution
platform that augments low-level cognitive robots
with high-level cognitive behaviours using theTR
approach suitably extended with reasoning under
uncertainty. The TR formalism will make the
specification of the expected behaviour easier than
traditional programming languages, since programs
are written in terms of a sequence of goals that the
system has to reach (i.e., missions). Because TR
programs are much easier to read than to write, non-
technical users could easily understand TR programs
written by experienced developers, deciding which
missions fit best to the problem they try to solve. So,
the programming of robots can reach a wider set of
end users. At the same time, the cloud infrastructure
will abstract almost all the resources needed to
perform simulation and computation tasks.
In this context, the proposal will provide technical
and non-technical users with intuitive application
development tools to easily create custom
assemblies of autonomous robots to solve
application specific tasks, as if they were involved in
a mission. Applications will be hosted in the cloud
without the need of programming code, using
simple, and easy-to-use visual development tools
based on a drag and drop development model (see
Scratch tool (Resnick, 2009) from MIT as an
example).
The proposal will be validated through a cloud-
based platform with scenarios from the civil area
including: critical infrastructure surveillance and
search and rescue in emergencies. By using
Unmanned Aerial Vehicles (UAVs), commonly
known as drones, we expect our approach to be
59
Rosique F., Sánchez P., Alonso D. and López J..
Towards a Unified Platform for Agent-based Cloud Robotics.
DOI: 10.5220/0005553700590064
In Proceedings of the 10th International Conference on Software Engineering and Applications (ICSOFT-EA-2015), pages 59-64
ISBN: 978-989-758-114-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
transferrable to other potential drone applications
areas like agriculture, commercial and logistics and
transport.
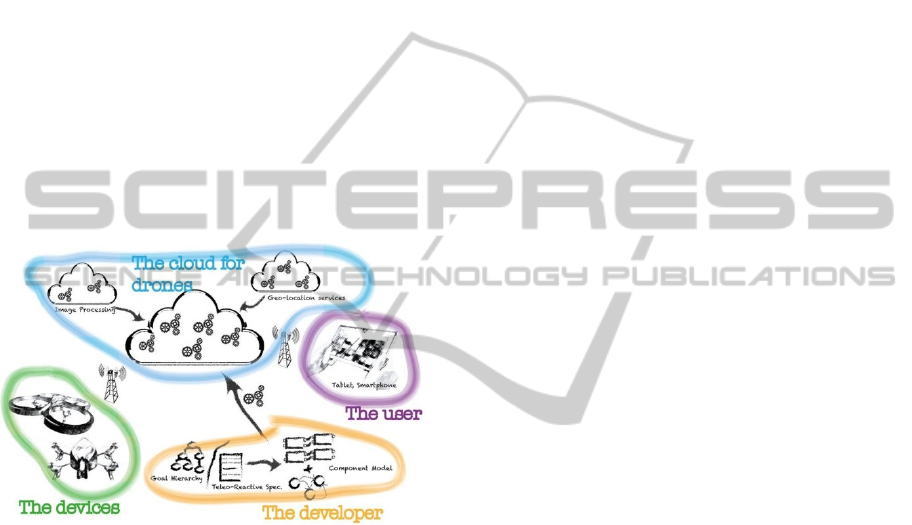
Figure 1 shows an overview of the platform from the
point of view of the end-user. Though drones have
been the robots selected for the demonstrators, it is
meant that other type of robots could be consider
and integrated in the solution. So, a typical non-
technical user could build a mission by: (1)
accessing the TR behaviour repository with missions
previously tested by other, experienced users, so that
the sharing of knowledge and experiences between
users is promoted; (2) configure, modify or extend
the reused missions; (3) simulate in a 3D
environment the expected behaviour of the TR
program associated to the mission; (4) deploy in real
the validated TR program to execute mission; and
(5) visualize and analyse the data (video, sensor
data, etc.) received from the drone during the
execution.
Figure 1: Overview of the approach with the involved
actors.
Moreover, RAC is aligned with the Robotics 2020
Strategic Research Agenda (SRA) of Europe
(produced by Euroboticsaisbl) (EUROP, 2010), as it
allows exploiting technology in key areas such as
agriculture, commercial and society security. It is
then needed more disruptive technologies ahead of
the wave, more markets to exploit emergent
robotics, and more awareness in Society of the
potential for robotic systems. Robot’s ability to
monitor large areas from the air and to work in
hazardous environments will provide new and cost
effective ways to gather valuable data in civil
security (border protection, patrolling of plants,
rescue, surveillance, etc.). This may represent an
additional opportunity for the creation of jobs and
the stimulation of the European economy given the
potential set of applications and SME that can
benefit from the results. Besides, making robot
programming easier and more affordable will greatly
increase their demand, boosting the creation of new
manufacturers of drones.
This paper is structured as follows: Section 2
describes a general overview of the proposal. Next,
Section 3 presents several works related to TR and
Cloud systems development. This is followed, in
Section 4, by the description of the scenarios of
implementation in which the proposal is used for
demonstrating the application of the approach.
Finally, in Section 5, we discuss our future work and
present some concluding remark.
2 GENERAL OVERVIEW
The main idea behind RAC is the development of a
cloud-based execution platform that augments low-
level cognitive robots with high-level cognitive
behaviours using the TR approach extended with
reasoning under uncertainty. The work will be
undertaken from the next four main perspectives:
intelligent robotic agent modelling, tools and
infrastructure (TR program implementation, 3D
simulation, support in the cloud, etc.), drone
integration, and real life demonstrators in domain of
high interest as stated in the SRA for Robotics in
Europe.
For this proposal, we will provide the TR
specification language and the implementations for
executing missions (with possible collaboration of
drones, making use of probabilistic reasoning under
uncertainty). These outcomes will be needed in a 3D
simulation environment for simulating the TR
programs executed on drones. Moreover, we will
provide a platform in the cloud that supports and
brings together the software artefacts developed,
giving to users a front-end to develop and deploy TR
missions. This cloud platform will cover the full life-
cycle of TR applications enabling users to: (i)
develop TR programs, (ii) test them with the 3D
simulation environment, and (iii) deploy them in real
drones, monitor their operation in the real
environment and store sensors readings for future
needs. A reusable repository of TR specifications
will enhance the reuse of open missions between
users and developers. Users will be able to learn
about the TR paradigm through educational material
specifically conceived for the proposal. The front-
end will provide users a novel visual language to
build their own TR missions. The demonstrators will
need first to be modelled and simulated using the
Virtual Simulator. Once the results of the simulation
are deemed adequate the missions can be executed.
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
60
Analysis of the simulations will also be used to
cross-validate with the results of the real-world
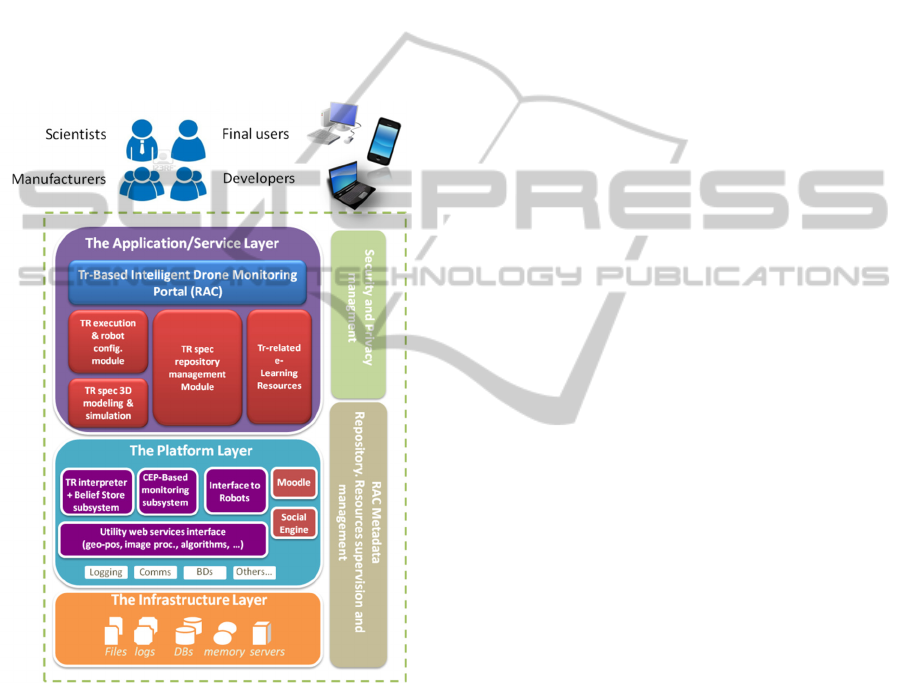
missions. To address this idea, the functionality
provided for RAC is organized in a three layer
architecture: (1) Infrastructure Layer; (2) Platform
Layer; and (3) Application/Service Layer. Figure 2
shows the main components of the RAC platform
where the stakeholders make use of the services
provided at the Application Service Layer (TR
program simulation and execution, TR program
edition, educational resources for learning the
paradigm, repositories of TR missions, etc.). The
platform layer includes those modules to be
developed for the proposal.
Figure 2: Architecture of RAC.
3 RELATED WORK
The use of TR programs for intelligent agents as
well as robotics has been extensively studied in the
literature. In (Benson and Nilsson, 1995), a quite
elaborate agent architecture is described that makes
use of TR procedures represented as trees, which
was introduced in (Nilsson, 1994). Nilsson’s agent
tower architecture paper (Nilsson, 2001) extended
his robust goal-directed TR robotic agent
programming language with an inference capability
using the tower of rule defined predicates sitting on
top of a set of rapidly changing percept facts. The
predicate definitions allow TR procedures towards
the top of the tower of TR procedures to have
Guard -> Action rules with guards that query and
interpret current percepts using application specific
concepts and a declarative model of the agent’s
environment. TR programs have also been
experimented in the RoboCup competitions
(Gubsich et al., 2008). In RAC we will interpret TR-
procedures with TeleoR (Clark and
Robinson, 2014), a typed higher-order major
extension of Nilsson’s Teleo-Reactive robotic agent
language. We will also combine TeleoR with a
flexibly-typed moded logic and functional language
QuLog (Clark and Robinson, 2015) for representing
the agent’s belief store and making inferences.
On the other hand, several research groups are
exploring the idea of robots that rely on cloud-
computing infrastructures to access vast amounts of
processing power and data. Some of the existing
cloud robotics projects and initiatives are listed
below:
RoboEarth (Roboearth, 2013) is a European
project led by the Eindhoven University of
Technology, in the Netherlands, to develop a
“World Wide Web for robots”, a giant database
where robots can share information about
objects, environments and tasks;
Researchers at Singapore’s ASORO (A-Star
Social Robotics Laboratory) have built a cloud-
computing infrastructure that allows robots to
generate 3D maps of their environments much
faster than they could with their on board
computers. It allows robots to perform
simultaneous localization and mapping much
efficiently than relying on their on-board
computers;
Google engineers developed Android-powered
robot software that allows a smartphone to
control robots based on platforms like
LegoMindStorms, iRobot Created, and Vex Pro;
Researchers at Laboratory of Analysis and
Architecture of Systems in Toulouse, France,
have created a user manual repository for
everyday objects to help robots with
manipulation tasks like opening a door. The idea
is to develop a software framework where
objects come with a “user-manual” for the robot
to manipulate them.
Yinong Chen et al., (2010), presented a research
done on service oriented robotics computing and
their design, implementation and evaluation of
Robot as a Service (RaaS) unit. Their work was
TowardsaUnifiedPlatformforAgent-basedCloudRobotics
61

sponsored by Microsoft, which demonstrates the
interest that big companies are putting in these
topics.
From the above list, RoboEarth is the initiative
that has more in common with RAC. The platform
obtained with RoboEarth allows robots connected to
the Internet to directly access the powerful
computational, storage, and communications
infrastructure of modern data centres (Google,
Facebook, Amazon, etc.) for robotics tasks and robot
learning. To create a system for robots to
communicate with each other, RoboEarth’s
researchers use a language that organizes
information into environments, objects, and actions.
The developed PaaS (Platform as a Service) solution
allows robots to perform complex functions like
mapping, navigation, or processing of human voice
commands in the cloud, at a fraction of the time
required using on-board computers.
Cloud robotics can be applied to any kind of
robots, large or small, humanoid or not. Eventually,
some of these robots could become more
standardized and sharing applications would be
easier. The “app paradigm” is one of the crucial
factors behind the success of Apple and Google.
Applications (apps) that are easy to develop, install,
and use. This is the main characteristic that
distinguishes RAC from existing approaches (like
RoboEarth): the idea of providing an intuitive and
easy to use notation for representing the desired
behaviour of robots (the TR formalism) combined
with a cloud computing infrastructure that allows to
deploy complex missions into cheap devices (the
micro-drones). This significantly will reduce the
learning curve, requiring less training and effort to
develop small-size missions (which perhaps
represent the largest portion of cases). At the same
time, the cloud serves not only as the common
infrastructure where the missions are executed, but
also provides a repository of missions where
developers can take the benefit of sharing and
reusing programs to control their own robots,
obtaining in doing so the benefits of the mentioned
app store philosophy.
4 SCENARIOS
As a demonstrator of the proposal, three scenarios
have been defined. These scenarios will allow us to
implement the final architecture shown in Figure 2
in a staggered and progressive way. The evolution of
architecture in different scenarios is as follows:
Scenario 1: this scenario implements the
minimum part of the architecture required in
order to run a first demonstration. The
Infrastructure Layer features the local cloud
infrastructure. The Platform Layer includes the
TR interpreter and a basic interface to the
selected drones. Finally, the Application Layer
implements the TR repository and the facilities
needed for loading, saving and executing
concrete TR programs and configure drones. It
should be highlighted that in this first scenario
we only consider reusing previously defined TR
programs that use a single agent.
Scenario 2: Continuing with the architecture
developed in Scenario 1, the Platform Layer will
provide the possibility of using external Web
services (useful for example for image
processing). In the Application Layer we will
add a graphical TR editor like Scratch in order to
create and modify TR programs, and a module
for 3D simulation. In this scenario several agents
are incorporated, obtaining a more complex and
mature case study.
Scenario 3: Finally, in this scenario the proposed
architecture is fully implemented.
Below the scenario 1 that has already been
implemented is described.
4.1 Scenario 1 Description
For the scenario demonstration missions, a real
environment replica has been deployed in a medium
size area located in Cartagena (Spain). The mission
considered the detection and tracking of persons in
an emergency situation. Appendix A contains an
excerpt of the TR rules developed in order to
accomplish the mission requirements.
For this task, we have selected micro-drones.
Micro-drones are a particular type of UAVs of great
interest to test new technological approaches given
their low cost, the large number of application fields,
and the possibility to use the results obtained with
them in other fields. We have selected the Ar. Drone
2.0 from Parrot, which has a good quality-price
ration and includes two cameras (HD 720p frontal
and QVGA vertical) and other sensors that assure a
high stability during the flight and provides an API
that allows us reading any sensor of the quadcopter
as well as sending commands to the propellers,
among other specifications. In addition, the well-
known Robot Operating System (ROS) (Quigley et
al., 2009) is compatible with this aerial platform
thanks to the ardrone_autonomy ROS driver. ROS
runs in a Raspberry Pi B+ installed on the drone.
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
62
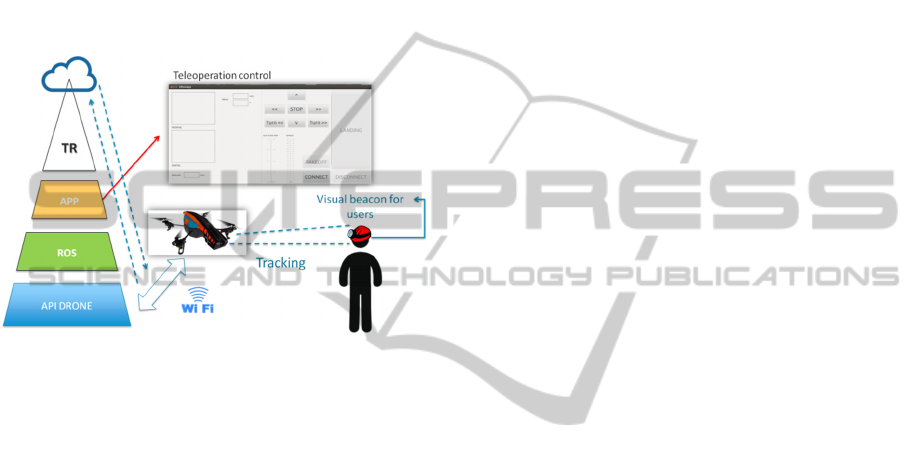
This Single Board Computer (SBC) is connected to
the Internet by using a 4G USB dongle. Therefore,
data can be stored in the cloud and evaluated by the
TR approach.
As figure 3 shows, the user carries out a passive
visual beacon that could be detected by the HD
frontal camera. This images as other sensor data are
sent to the cloud by using the C++ application
running in the SBC. This application provides
several high level commands (UP, DOWN,
FORWARD, among others) which are executed by
the implemented TR algorithm.
Figure 3: Scenario 1.
5 CONCLUSIONS
RAC aims to design, build, and validate a new
generation of cloud robotic platforms that enable
agent-based intelligent control of robots deployed in
unknown and dynamic environments. The system
will consider: (1) state-of-the-art resources to control
physical robots; (2) state-of-the-art simulation
techniques to define a 3D simulation environment
which can be used to simulate TR mission
execution; (3) state-of-the-art Artificial Intelligence
and Knowledge Representation techniques to realize
high-level robotic cognitive abilities; (4) novel
techniques for programming reactive plans and
robotic behaviours through missions and novel
mechanisms for building new behaviours from
existing ones, both for experienced and non-expert
users; (5) novel multi-layered cloud platform as the
infrastructure to maintain a continuous link between
the robots acting on a physical environment and
their agent counterparts, to provide sensor data from
robots to agents, and to provide high-level
autonomous decisions from agents to robots.
RAC seeks to develop robots with the capability
to interact with humans and operate dynamically in a
constantly changing robotic-mission environment.
As the notion of robotics often refers to a very broad
term, encompassing such diverse capabilities as low-
level perception and action, network connectivity
and decision making, the focus of RAC’s effort is to
close the innovation gap between by extending these
different technologies in the civil robotics market
and its associated stakeholders.
Among the expected benefits of the proposal, we
want to highlight that we expect RAC to
significantly improve the level of development of
service robots; to exploit the results in civil markets;
to provide a holistic robotic system development
process, facilitating validation and deployment; to
share knowledge and to harmonise the design of
software for robots; to get a novel action planning
technique to increase both flexibility and
programming easiness of robotic missions; to
improve upon the cognitive tasks of robots using
goal-oriented reactive approaches, their autonomy
and ability to react to changes in the environment; to
leverage the use of knowledge representation and
reasoning methods; and to get the resources for
enabling a culture of robot programming for
everyone, among others.
ACKNOWLEDGEMENTS
This work has been partially funded by the Spanish
Ministry of Economy and Competitiveness under the
CICYT Projects cDrone (ref.~TIN2013-45920-R)
and ViSelTR (ref.~TIN2012-39279).
REFERENCES
Russell, S. J., Norvig, P., 2003. Artificial Intelligence: A
Modern Approach, Pearson Education.
Thrun, S., Burgard, W., Fox, D., 2005. Probabilistic
Robotics, MIT Press.
Murphy, R., Tadokoro, S., Nardi, D., Jacoff, A., Fiorini,
P., Choset, H., Erkmen, A. M., 2008. Search and
Rescue Robotics, Springer Handbook of Robotics,
pp. 1151-1173.
Kaminka, G. A., 2012. Autonomous Agents Research in
Robotics: A Report from the Trenches, 2012 AAAI
Spring Symposium: Designing Intelligent Robots.
Dipsis, N., Stathis, v, 2010. EVATAR - A Prototyping
Middleware Embodying Virtual Agents to
Autonomous Robots. Ambient Intelligence and Future
Trends-International Symposium on Ambient
Intelligence (ISAmI 201.). pp. 167-175.
Benson, S., Nilsson, N., 1995. Reacting, Planning and
Learning in an Autonomous Agent, Machine
Intelligence. Machine Intelligence 14, pp. 29-64.
TowardsaUnifiedPlatformforAgent-basedCloudRobotics
63

Nilsson N. J., 2001. Teleo-reactive programs and the
triple-tower architecture. Electronic Transactions on
Artificial Intelligence, vol. 5, pp. 99-11.
Clark, K. L., Robinson, P. J., 2014. Programming Robotic
Agents: A Multi-tasking Teleo-Reactive Approach, in
preparation for publication, Springer.
Resnick, M., 2009. Scratch: Programming for All.
Communications of the ACM, vol. 52, pp. 60-67.
EUROP, 2010. Robotic Visions to 2020 and beyond, The
strategic research agenda for robotics in Europe. IEEE,
vol. 17, pp. 15-16.
Nilsson, N. J., 1994. Teleo-reactive programs for agent
control, Journal of Artificial Intelligence Research,
vol. 1, pp. 139-158.
Gubisch, G., Steinbauer, G., Weiglhofer, M., Wotawa, F.,
2008. A Teleo-Reactive architecture for fast, reactive
and robust control of mobile robots. New Frontiers in
Applied Artificial Intelligence, pp. 541-550.
Clark, K. L., Robinson, P. J., 2015. QuLog: Engineered
for Agent Applications, in preparation for publication,
Springer.
Roboearth, 2013. www.roboearth.org, funded by the
European Union Seventh Framework Programme
FP7/2007-2013.
Chen, Y., Du. Z., Garcia-Acosta, M., 2010. Robot as a
Service in Cloud Computing. 2010 Fifth IEEE
International Symposium on Service Oriented System
Engineering.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., & Ng, A. Y., 2009. ROS: an open-source
Robot Operating System. ICRA workshop on open
source software, vol. 3, pp. 5.
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
64
