
Fast Moving Object Detection from Overlapping Cameras
Mika
¨
el A. Mousse
1,2
, Cina Motamed
1
and Eug
`
ene C. Ezin
2
1
Laboratoire d’Informatique Signal et Image de la C
ˆ
ote d’Opale, Universit
´
e du Littoral C
ˆ
ote d’Opale, Calais, France
2
Unit
´
e de Recherche en Informatique et Sciences Appliqu
´
ees, Institut de Math
´
ematiques et de Sciences Physiques,
Universit
´
e d’Abomey-Calavi, Abomey Calavi, B
´
enin
Keywords:
Motion Detection, Codebook, Homography, Overlapping Camera, Information Fusion.
Abstract:
In this work, we address the problem of moving object detection from overlapping cameras. We based on
homographic transformation of the foreground information from multiple cameras to reference image. We
introduce a new algorithm based on Codebook to get each single views foreground information. This method
integrates a region based information into the original codebook algorithm and uses CIE L*a*b* color space
information. Once the foreground pixels are detected in each view, we approximate their contours with poly-
gons and project them into the ground plane (or into the reference plane). After this, we fuse polygons in
order to obtain foreground area. This fusion is based on geometric properties of the scene and on the quality
of each camera detection. Assessment of experiments using public datasets proposed for the evaluation of
single camera object detection demonstrate the performance of our codebook based method for moving object
detection in single view. Results using multi-camera open dataset also prove the efficiency of our multi-view
detection approach.
1 INTRODUCTION
In computer vision community, the use of multi-
camera takes a lot of scope. Indeed, motivations are
multiple and concern various fields as monitoring and
surveillance of significant protected sites, control and
estimation of flows (car parks, airports, ports, and mo-
torways). Because of the fast growing of data pro-
cessing, communications and instrumentation, such
applications become possible. These kind of systems
require more cameras to cover overall field-of-view.
They reduce the effects of objects dynamic occlu-
sion and improve foreground zone estimation accu-
racy. The performance of multi-camera surveillance
systems depends on the quality of each single view
object detection algorithm and on the quality of the
fusion of the single views decision.
In single camera system, many algorithms about
object detection exist with different purposes. These
algorithms are subdivide in three categories : with-
out background modeling, with background modeling
and combined approach. Algorithms based on back-
ground modeling are recommended in case of dy-
namic background observed by a static camera. Many
research works used this approach.One of these algo-
rithms is the codebook based algorithm proposed in
(Kim et al., 2005).
1.1 Object Detection using Codebook
The method proposed by Kim et al. detects in real-
time object in dynamic background. In this method,
each pixel p
t
is represented by a codebook C =
{c
1
,c
2
,...,c
L
} and each codeword c
i
, i = 1,...,L by
a RGB vector v
i
and a 6-tuples aux
i
={
ˇ
I
i
,
ˆ
I
i
, f
i
, p
i
,
λ
i
, q
i
} where
ˇ
I and
ˆ
I are the minimum and maximum
brightness of all pixels assigned to this codeword c
i
,
f
i
is the frequency at which the codeword has oc-
curred, λ
i
is the maximum negative run length defined
as the longest interval during the training period that
the codeword has not recurred, p
i
and q
i
are the first
and last access times, respectively, that the codeword
has occurred. The codebook model is created or up-
dated using two criteria. The first criterion is based
on color distortion (1) whereas the second is based on
brightness distortion (2).
q
||p
t
||
2
−C
2
p
<= ε
1
(1)
I
low
≤ I ≤ I
hi
(2)
In (1), the autocorrelation value C
2
p
is given by equa-
tion (3) and ||p
t
||
2
is given by equation (4).
C
2
p
=
(R
i
R + G
i
G + B
i
B)
2
R
2
i
+ G
2
i
+ B
2
i
(3)
296
Mousse M., Motamed C. and Ezin E..
Fast Moving Object Detection from Overlapping Cameras.
DOI: 10.5220/0005541402960303
In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2015), pages 296-303
ISBN: 978-989-758-123-6
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

||p
t
||
2
= R
2
+ G
2
+ B
2
(4)
In relation (2), I
low
= α
ˆ
I
i
, I
hi
= min{β
ˆ
I,
ˇ
I
α
} and
I =
√
R
2
+ G
2
+ B
2
.
After the training period, if an incoming pixel
matches with a codeword in the codebook, then
this codeword will be updated and this pixel will be
treated as a background pixel. If the pixel doesn’t
match, its information will be put in cache word and
this pixel will be treated as a foreground pixel. Due
to the performance of the codebook based method,
several researchers continue by exploring further (Li
et al., 2006; Cheng et al., 2010; Fang et al., 2013;
Mousse et al., 2014).
In this work, instead using HSV color space
(Doshi and Trivedi, 2006), HSL color space (Fang
et al., 2013) or YUV color space (Cheng et al., 2010),
we investigate a new color space. Then, we propose
a new approach by converting pixels to CIE L*a*b*
color space. We also use the Improved Simple Lin-
ear Iterative Clustering (Schick et al., 2012) to cluster
pixels. Finally, we build the codebook model on every
cluster. With each single view foreground informa-
tion, multi-camera object detection can be performed.
1.2 Multi-camera Object Detection
According to Xu et al., existing multi-camera surveil-
lance systems may be classified into three categories
(Xu et al., 2011).
• The system in the first category fuses low-level in-
formation. In this category, multi camera surveil-
lance systems detect and/or track in a single cam-
era view. They switch to another camera when the
systems predict that the current camera will not
have a good view of the scene (Cai and Aggarwal,
1998; Khan and Shah, 2003).
• In the second one, system extracts features and/or
even tracks targets in each individual camera. Af-
ter this, we integrate all features and tracks in or-
der to obtain a global estimate.These systems are
of intermediate-level information fusion (Kang
et al., 2003; Xu et al., 2005; Hu et al., 2006).
• The system in the third category fuses high-level
information. In these systems, individual cam-
eras don’t extract features but provide foreground
bitmap information to the fusion center. Detection
and/or tracking are performed by a fusion center
(Yang et al., 2003; Khan and Shah, 2006; Eshel
and Moses, 2008; Khan and Shah, 2009; Xu et al.,
2011).
This paper points out on the approaches in the third
category. In this category some algorithms have been
proposed. (Khan and Shah, 2006) proposed to use a
planar homographic occupancy constraint to combine
foreground likelihood images from different views.
It resolves occlusions and determines regions on the
ground plane that are occupied by people. (Khan and
Shah, 2009) extended the ground plane to a set of
planes parallel to it, but at some heights off the ground
plane to reduce false positives and missing detections.
The foreground intensity bitmaps from each individ-
ual camera are warped to the reference image by (Es-
hel and Moses, 2008). The set of scene planes are at
the height of people heads. The head tops are detected
by applying intensity correlation to align frames from
different cameras. This work is able to handle highly
crowded scenes. (Yang et al., 2003) detect objects
by finding visual hulls of the binary foreground im-
ages from multiple cameras. These methods use the
visual cues from multiple cameras and are robust in
coping with occlusion. However the pixel-wise ho-
mographic transformation at image level slows down
the processing speed. To overcome this drawback,
(Xu et al., 2011) proposed an object detection ap-
proach via homography mapping of foreground poly-
gons from multiple camera. They approximate the
contour of each foreground region with a polygon and
only transmit and project the vertices of the polygons.
The foreground regions are detected by using Gaus-
sian mixture model. These polygons are then rebuilt
and fused in the reference image. This method pro-
vides good results, but fails if a moving object is oc-
cluded by a static object.
In this work, we propose a new strategy based on
polygons projection. For each object, our strategy is
to detect the camera which has the best view of the ob-
ject and we only project the corresponding polygon in
the reference plane. A foreground polygon is obtained
by finding the convex hull of each single view fore-
ground region. This selection incorporates geometric
properties of the scene and the quality of each single
view detection in order to make better decisions. This
paper is subdivided in four sections. The second sec-
tion presents our approach. The experimental results
and performance evaluation are presented in the third
section. In the fourth section, we conclude this work.
2 OVERVIEW OF OUR METHOD
In this section we present our multi-view foreground
regions detection algorithm. Firstly we detect in each
single view the foreground maps and fuse them to ob-
tain a multi-view foreground object.
FastMovingObjectDetectionfromOverlappingCameras
297

This section is subdivided in four parts : the first
subsection presents the foreground pixels identifica-
tion algorithm, the second shows how foreground pix-
els are grouped, the planar homography mapping is
presented in the third subsection and the fourth sub-
section presents our multi-view fusion approach.
2.1 Foreground Pixels Segmentation
In this part, we present our single view foreground
pixel extraction based on codebook. We convert all
pixel from RGB to CIE Lab color space and in-
tegrate superpixel segmentation algorithm in back-
ground modeling step. The use of superpixels be-
comes increasingly popular for computer vision ap-
plications. In this work, we adopt the algorithm pro-
posed by (Schick et al., 2012) because they proved
the efficacy of this superpixels segmentation algo-
rithm in image segmentation. After the extraction
of superpixels, we build a codebook background
model. Let P ={s
1
,s
2
,...,s
k
} represents the K su-
perpixels obtained after superpixels segmentation.
Each superpixel s
j
, j ∈{1,2,...,k} is composed by
m pixels. With each superpixel, we buid a code-
book C ={c
1
,c
2
,...,c
L
} which contains L codewords
c
i
,i ∈{1,2,...,L}. Each codewords c
i
consists on an
vector v
i
= ( ¯a
i
,
¯
b
i
) and 6-tuples aux
i
={
ˇ
L
i
,
ˆ
L
i
, f
i
, p
i
,
λ
i
, q
i
}in which
ˇ
L
i
,
ˆ
L
i
are the minimum and maximum
of luminance value, f
i
is the frequency at which the
codeword has occurred, λ
i
is the maximum negative
run length defined as the longest interval during the
training period that the codeword has not recurred, p
i
and q
i
are the first and last access times, respectively,
that the codeword has occurred.
¯
L, ¯a,
¯
b are respec-
tively the average value of component L*, a* and b*
in a superpixel. We compute the color distortion by
replacing (5) and (6) into (1). For the brightness dis-
tortion degree we use
¯
L value as the intensity of the
superpixel. Therefore in expression (2) the value of I
is given by
¯
L.
p
t
= ¯a
2
+
¯
b
2
(5)
C
2
p
=
( ¯a
i
¯a +
¯
b
i
¯
b)
2
¯a
2
i
+
¯
b
2
i
(6)
After the learning phase, we detect foreground pixel
by subtracting the current image from the background
model. The substraction method is based on superpix-
els. The proposed algorithm is detailed in Algorithm
2.
1
BGS(p
k
) is a procedure which subtracts an incoming pixel
p
k
from the background. It’s defined as Algorithm 3.
Algorithm 1: Foreground objects segmentation.
1 l ← 0,t ← 1
2 for each frame F
t
of input sequence S do
3 Segment frame F
t
into k-superpixels
4 for each superpixels Su
k
of frame F
t
do
5 p
t
(
¯
L, ¯a,
¯
b)
6 for i = 1 to l do
7 if (colordist (p
t
,v
i
)) and
(brightness (
¯
L,
ˇ
L
i
,
ˆ
L
i
)) then
8 Select a matched codeword c
i
9 Break
10 if there is no match then
11 l ← l + 1
12 create codeword c
L
by setting
parameter v
L
← ( ¯a,
¯
b) and aux
L
←{
¯
L,
¯
L, 1, t −1, t, t}
13 else
14 update codeword c
i
by setting
v
i
← (
f
i
¯a
i
+ ¯a
f
i
+1
,
f
i
¯
b
i
+
¯
b
f
i
+1
) and
aux
i
←{min(
¯
L,
ˇ
L
i
), max(
¯
L,
ˆ
L
i
),
f
i
+ 1, max(λ
i
,t −q
i
), p
i
, t}
15 for each codeword c
i
do
16 λ
i
←max{λ
i
,((m×n×t)−q
i
+ p
i
−1)}
17 if t > N then
18 for each pixels p
k
of frame F
t
do
19 BGS(p
k
)
1
20 t ←t +1
Algorithm 2: procedure BGS(p
k
)
1 for all codewords do
2 find the codeword c
m
matching to p
k
based
on color and brightness distortions.
3
BGS(p
k
) =
foreground if there is no match
background otherwise
2.2 Foreground Pixels Grouping
After the foreground pixels in each view are detected,
these pixels need to be grouped into foreground re-
gion. The region is obtained by finding the con-
vex hull of all contours detected in threshold image.
Then, all region can be approximated by a polygon
and each polygon is convex. To use the polygon ver-
tices in the information fusion module, we have de-
cided to assign an unique identifier id to each polygon
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
298

and each polygon is characterized by a vector V
id
=
(v
1 id
,v
2 id
,...,v
k id
) in which each v
j id
, j = 1,...,k
represents a vertex of the polygon.
2.3 Planar Homography Mapping
Homographies are usually estimated between a pair
of images by finding feature correspondence in these
images. The most commonly used feature is corre-
sponded points in different images, though other fea-
tures such as lines or conics in the individual images
may be used. These features are selected and matched
manually or automatically from 2D images to com-
pute the homography between two camera views or
the homography between one camera view and the
top view. The homography transformation is a spe-
cial variation of the projective transformation. Let us
consider the point x = (x
s
,y
s
,1) in the image with-
out distortion and the point X = (X
w
,Y
w
,Z
w
,1) in the
3D world. The projection transformed from X to x is
given by equation (7).
x
s
y
s
1
=
f /s
x
s C
x
0
0 f /s
y
C
y
0
0 0 1 0
r
11
r
12
r
13
t
x
r
21
r
22
r
23
t
y
r
31
r
32
r
33
t
z
0 0 0 1
X
w
Y
w
0
1
(7)
If X is limited on the ground plane, therefore Z
w
will
be 0 and the projection transformed from X to x be-
comes:
x
s
y
s
1
=
f /s
x
s C
x
0 f /s
y
C
y
0 0 1
r
11
r
12
r
13
t
x
r
21
r
22
r
23
t
y
r
31
r
32
r
33
t
z
X
w
Y
w
1
(8)
x
s
y
s
1
=
h
11
h
12
h
13
h
21
h
22
h
23
h
31
h
32
h
33
X
w
Y
w
1
(9)
Planar homography mapping consists in finding 3×3
matrix which correspond a point pt(x,y) to an other
point pt
0
(x
0
,y
0
) on the ground plane in two different
views.
2.4 Fusion Approach
After the detection of each foreground map, we need
to fuse these regions to get a multi-view information.
The aim of our approach is to detect the camera which
provides the best view of each object in the scene. The
union of the selected objects views gives an overview
of the scene. This selection is based on geometric
properties of the scene and on the quality of each cam-
era detection. Let us consider a scene being observed
Figure 1: Illustration of scene observed by two cameras.
by cameras with overlapping views as shown in Fig-
ure 1. In Figure 1, the scene is observed by two cam-
eras.
Each camera observes the scene differently and it
is necessary to choose the camera which provides the
best view of an object.
Based on each single foreground polygons infor-
mation about the coverage area, we identify three
cases :
1. a polygon from the view of a camera is not asso-
ciated with any polygon from the view of another
camera;
2. a polygon from the view of a camera is associated
with only one polygon from the view of another
camera;
3. a polygon from the view of a camera is associated
with more than one polygon from the view of an-
other camera;
A polygon P1 will be considered associated with a
polygon P2 from another camera if the projection of
one of the P1 vertex into the plane of the second cam-
era view belongs to P2. The projection of the ver-
tex is performed by using the principles of planar ho-
mography mapping. Thus, a calibration of the stage
must be carried out for obtaining the projection ma-
trix. The ray casting algorithm proposed in (Suther-
land et al., 1974) has been used in order to resolve
point-in-polygon problem.
In the first case, we remark that only one camera
detect the object and we assume that this camera has
the best possible view of the object. Then the ver-
tices of the corresponding polygon are projected in
the ground plane (or the reference plane). The corre-
sponding multi-view foreground map is then obtained
by filling in the projected polygon.
In the second case, the object is detected by more
than one camera. For the selection of the best camera,
firstly we prioritize the cameras that detect the largest
FastMovingObjectDetectionfromOverlappingCameras
299
number of the lowest points of each polygon associ-
ated to the object as foreground pixels. For each poly-
gon the lowest point is the point nearest of the ground.
It is the vertex which has the largest value on the or-
dinate component in the camera coordinate system. If
at least two associated polygons satisfy this criterion,
then the selection is made with respect to the position
of the object relative to the camera. Indeed, this po-
sition has an influence on the rendering in the homo-
graphic plan. For performing this selection, for each
camera we calculate the distance between the projec-
tion of the highest vertex of the polygon in the ground
plane (or the reference plane) and the projection of
the lowest vertex of the polygon in the ground plane
(or the reference plane). The best camera is the cam-
era which has the smallest distance. Then the ver-
tices of the corresponding polygon are projected in
the ground plane (or the reference plane). The corre-
sponding multi-view foreground map is then obtained
by filling in the projected polygon.
In the third case,we conclude that this is dynamic
n occlusion between objects. According to this, the
best camera is the camera in which more than one
polygon is associated. Then the vertices of the corre-
sponding polygons are projected in the ground plane
(or the reference plane). The corresponding multi-
view foreground map is then obtained by filling in the
projected polygons.
3 EXPERIMENTAL RESULTS
AND PERFORMANCE
In this section, we present the performance of the pro-
posed approach by comparing it with other state of
the art method. Firstly we present the experimental
environment and results. After that we present and
analyze the performance of our system.
3.1 Experimental Results
We present experimental results at two levels. For
the validation of our single view algorithm, We have
selected two public benchmarking datasets (available
from http://www.changedetection.net) which are
covered under the work done in (Goyette et al.,
2012). They are “fall” and “boats” datasets. In order
to test our multi-view object localization algorithm,
we used video sequence which contains significant
lighting variation, dynamic occlusion and scene
activity. We selected “ Dataset 1” (available from
http://ftp.pets.rdg.ac.uk/pub/PETS2001/DATASET1/
sequence which has been used for testing several
multi view detection/tracking algorithms. These
datasets are made available to researchers for the
evaluation of moving object detection algorithms.
The experiment environment is Intel Core i7 CPU
L 640 @ 2.13GHz ×4 processor with 4GB memory
and the programming language is C++. The param-
eters of superpixels segmentation algorithm is given
by (Schick et al., 2012). In our implementation if the
size of input frame is (M ×N) then we construct
M×N
50
superpixels. The single view segmentation results are
presented in Figure 2 and Figure 3 whereas the multi-
view segmentation results are presented in Figure 4.
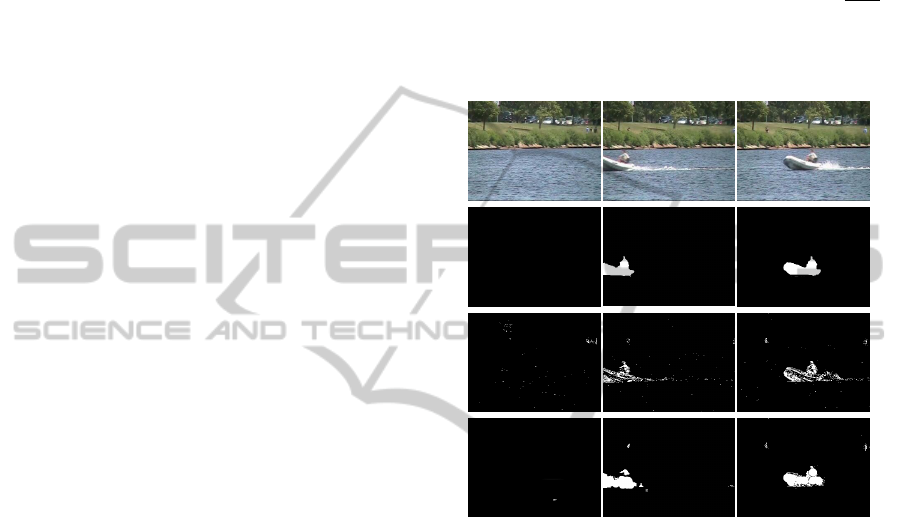
Figure 2: “boats” dataset segmentation results. The first
row shows the original images. The second row shows the
ground truth. The third row shows the detected results by
(Kim et al., 2005), and the last row shows the detected re-
sults by our proposed algorithm.
3.2 Performance Evaluation and
Discussion
Firstly, we evaluate the performance of our proposed
single view object detection and compare it to other
research works which extend the original codebook
by exploiting other color space (RGB, HSV, HSL,
YUV) information. In order to perform this compari-
son, we use an evaluation based on ground truth. The
ground truth has been obtained by manually labeling
foreground objects in the original frame. The ground
truth based metrics are : true negative (TN), true pos-
itive (TP), false negative (FN) and false positive (FP).
We use these metrics to compute other parameters
for the evaluation of the algorithm. These parame-
ters are false positive rate (FPR), true positive rate
(TPR), precision (PR) and F-measure (FM).These pa-
rameters are respectively computed using expressions
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
300
(10), (11), (12) and (13).
FPR = 1 −
T N
T N + FP
(10)
PR =
T P
T P + FP
(11)
T PR =
T P
T P + FN
(12)
FM =
2 ×PR ×T PR
PR + T PR
(13)
Results are presented in Table 1 and Table 2. In these
tables, CB refers to the method proposed by (Kim
et al., 2005), CB HSV refers to the method suggested
by (Doshi and Trivedi, 2006), CB HSL refers to the
algorithm proposed by (Fang et al., 2013), CB YUV
refers to the algorithm suggested by (Cheng et al.,
2010) and CB LAB refers to our proposed algorithm.
Table 1: Different metrics according to experiments with
“boats” dataset.
Metrics CB CB HSV CB HSL CB YUV CB LAB
FPR 0.23 0.25 0.21 0.27 0.21
PR 0.87 0.86 0.89 0.80 0.91
TPR 0.46 0.48 0.50 0.55 0.53
FM 0.60 0.62 0.64 0.65 0.66
According to results presented in Table 1 and Ta-
ble 2, we can conclude that our modified codebook
works better than standard codebook. The proposed
method reduces the percentage of false alarms and in-
creases the precision of object detection. According
Figure 3: “fall” dataset segmentation results. The first
row shows the original images. The second row shows the
ground truth. The third row shows the detected results by
(Kim et al., 2005), and the last row shows the detected re-
sults by our proposed algorithm.
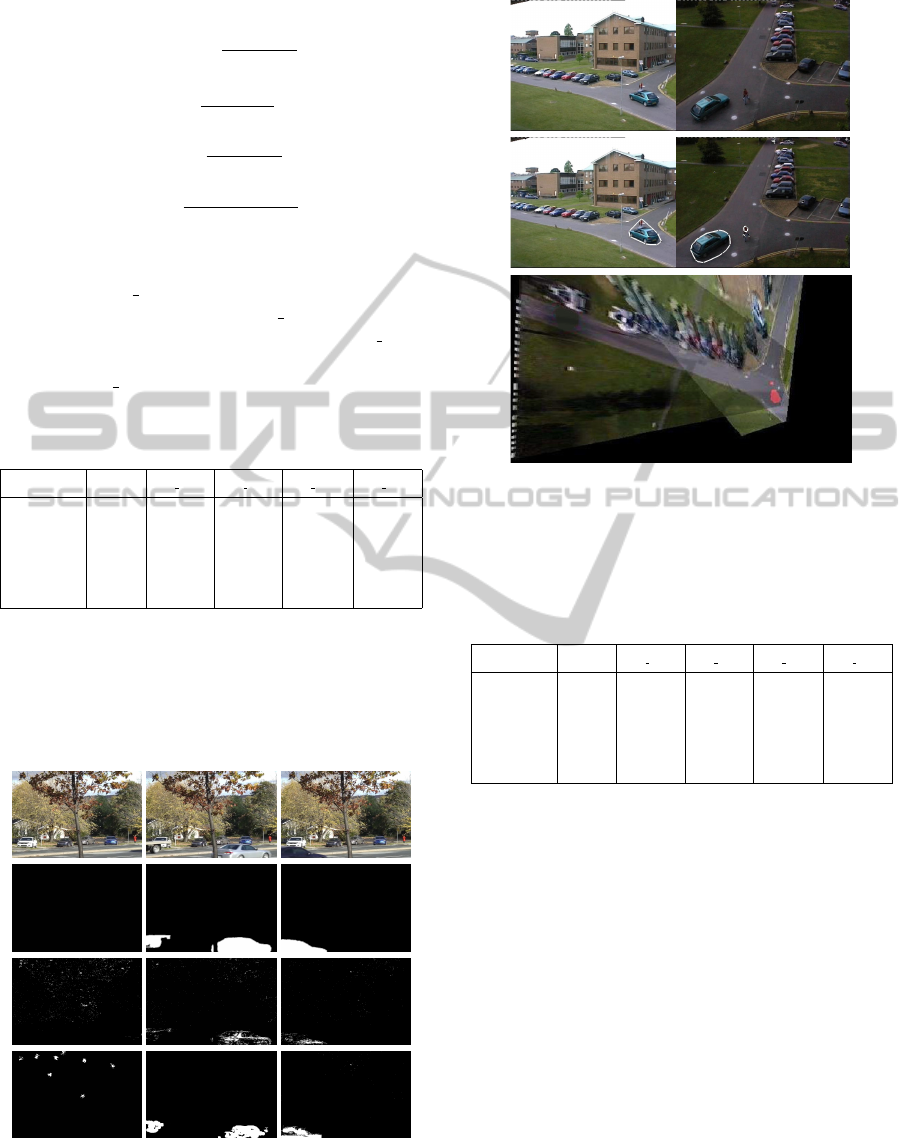
Figure 4: The first row shows the original 2 single views.
The second rows shows the foreground region detected in
single view. The third row shows the segmentation result
using a multi view informations.
Table 2: Different metrics according to experiments with
“fall” dataset.
Metrics CB CB HSV CB HSL CB YUV CB LAB
FPR 0.31 0.33 0.25 0.38 0.23
PR 0.56 0.60 0.63 0.41 0.67
TPR 0.32 0.39 0.43 0.45 0.45
FM 0.41 0.47 0.51 0.43 0.54
to F-measure values, we can claimed that the accu-
racy of object detection by using static camera is also
improved by using our proposed model. When we
compare our approach to other enhancement of code-
book based algorithm, we show that our method has
the best accuracy of object detection. With “boats”
dataset, the method proposed in (Cheng et al., 2010)
detects more true positive pixels than our proposed
method. But it also emits more false positive alarm
than our approach. The use of superpixel segmenta-
tion reduces the complexity of the modeling process
using codebook model. Secondly, we evaluate the
performance of our multi view detection approach.
The results high lightly that our approach provides
a good moving object location and provide good ac-
curacy in a dynamic occlusion case. It has similar
performance in moving object detection to other ap-
proaches of the state of the art such as (Xu et al.,
2011). However our approach detects less false pos-
FastMovingObjectDetectionfromOverlappingCameras
301

itive than the approach proposed by Xu et al. mainly
due to the fact that our single view detection algo-
rithm emits less false positive alarm than MoG which
is used in (Xu et al., 2011). Our proposed algorithm
is also faster than state of the art multi-view approach.
Indeed, comparing our method to Xu et al. algorithm
which is known as been 40 times faster than the exist-
ing algorithms, we note that our method improves the
execution time by 22%.
4 CONCLUSIONS
In this paper, we have proposed a fast algorithm
for object detection by using overlapping cameras
based on homography. In each camera, we propose
an improvement of codebook based algorithm to get
foreground pixels. The multi-view object detection
that we proposed in this work algorithm is based on
the fusion of multi camera foreground informations.
We approximate the contour of each foreground
region with a polygon and only project the vertices of
the relevant polygons. The experiments have shown
that this method can run in real time and generate
results similar to those warping foreground images.
ACKNOWLEDGEMENTS
This work is partially funded by the Association
AS2V and Fondation Jacques De Rette, France.
We also appreciate the help of Mr L
´
eonide Sinsin
and Mr Patrick A
¨
ınamon for proof-reading this ar-
ticle. Mika
¨
el A. Mousse is grateful to Service de
Coop
´
eration et d’Action Culturelle de Ambassade de
France au B
´
enin.
REFERENCES
Cai, Q. and Aggarwal, J. (1998). Automatic tracking of hu-
man motion in indoor scenes across multiple synchro-
nized video streams. In Proc. of IEEE International
Conference on Computer Vision.
Cheng, X., Zheng, T., and Renfa, L. (2010). A fast
motion detection method based on improved code-
book model. Journal of Computer and Development,
47:2149–2156.
Doshi, A. and Trivedi, M. M. (2006). Hybrid cone-
cylinder codebook model for foreground detection
with shadow and highlight suppression. In Proceed-
ings of the IEEE International Conference on Ad-
vanced Video and Signal Based Surveillance, pages
121–133.
Eshel, R. and Moses, Y. (2008). Homography based multi-
ple camera detection and tracking of people in a dense
crowd. In Proc. of 18th IEEE International Confer-
ence on Computer Vision and Pattern Recognition.
Fang, X., Liu, C., Gong, S., and Ji, Y. (2013). Object de-
tection in dynamic scenes based on codebook with su-
perpixels. In Proceedings of the Asian Conference on
Pattern Recognition, pages 430–434.
Goyette, N., Jodoin, P. M., Porikli, F., Konrad, J., and Ish-
war, P. (2012). Changedetection.net: A new change
detection benchmark dataset. In Proceedings of the
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition Workshops.
Hu, W., Hu, M., Zhou, X., Tan, T., Lou, J., and Maybank, S.
(2006). Principal axis-based correspondence between
multiple cameras for people tracking. In IEEE Trans.
on Pattern Analysis and Machine Intelligence, vol. 29.
Kang, J., Cohen, I., and Medioni, G. (2003). Continuous
tracking within and across camera streams. In Proc.
of International Conference on Pattern Recognition.
Khan, S. and Shah, M. (2003). Consistent labeling of
tracked objects in multiple cameras with overlapping
fields of view. In IEEE Trans. on Pattern Analysis and
Machine Intelligence, vol. 23.
Khan, S. M. and Shah, M. (2006). A multi-view approach to
tracking people in crowded scenes using a planar ho-
mography constraint. In Proc. of 9th European Con-
ference on Computer Vision.
Khan, S. M. and Shah, M. (2009). Tracking multiple oc-
cluding people by localizing on multiple scene planes.
In IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, vol. 31.
Kim, K., Chalidabhonse, T. H., Harwood, D., and Davis,
L. (2005). Real-time foreground-background segmen-
tation using codebook model. In Elsevier Real-Time
Imaging, 11(3) : 167-256.
Li, Y., Chen, F., Xu, W., and Du, Y. (2006). Gaussian-based
codebook model for video background subtraction. In
Lecture Notes in Computer Science.
Mousse, M. A., Ezin, E. C., and Motamed, C. (2014).
Foreground-background segmentation based on code-
book and edge detector. In Proc. of International Con-
ference on Signal Image Technology & Internet Based
Systems.
Schick, A., Fischer, M., and Stiefelhagen, R. (2012). Mea-
suring and evaluating the compactness of superpix-
els. In Proc. of International Conference on Pattern
Recognition, pages 930–934.
Sutherland, I. E., Sproull, R. F., and Schumacker, R. A.
(1974). A characterization of ten hidden surface al-
gorithms. In ACM Computing Surveys (CSUR).
Xu, M., Orwell, J., Lowey, L., and Thirde, D. (2005). Ar-
chitecture and algorithms for tracking football players
with multiple cameras. In IEE Proc. of Vision, Image
and Signal Processing.
Xu, M., Ren, J., Chen, D., Smith, J., and Wang, G. (2011).
Real-time detection via homography mapping of fore-
ground polygons from multiple. In Proc. of 18th IEEE
International Conference on Image Processing.
ICINCO2015-12thInternationalConferenceonInformaticsinControl,AutomationandRobotics
302

Yang, D. B., Gonzalez-Banos, H. H., and Guibas, L. J.
(2003). Counting people in crowds with a real-time
network of simple image sensors. In Proc. 9th IEEE
International Conference on Computer Vision.
FastMovingObjectDetectionfromOverlappingCameras
303
