
Crowd Event Detection in Surveillance Video
An Approach based on Optical Flow High-frequency Feature Analysis
Ana Paula G. S. de Almeida, Vitor de Azevedo Faria and Flavio de Barros Vidal
Department of Computer Science, University of Brasilia, Brasilia, Distrito Federal, 70.910-900, Brazil
Keywords:
Crowd Event Detection, Optical Flow, High-frequency Feature.
Abstract:
Many real-world actions occur often in crowded and dynamic environments. Video surveillance application
uses crowd analysis for automatic detection of anomalies and alarms. In this position paper we propose a
crowd event detection technique based on optical flow high-frequency feature analysis to build a robust and
stable descriptor. The proposed system is designed to be used in surveillance videos to automatic violence acts
detection. Preliminary results show that the proposed methodology is able to perform the detection process
with success and allows the development of an efficient recognition stage in further works.
1 INTRODUCTION
Many real-world actions occur often in crowded and
dynamic environments. Video surveillance applica-
tion uses crowd analysis for automatic detection of
anomalies and alarms (Ke et al., 2007). In order, be-
havior of the crowd attracts many researchers interest
because of its complexity and abstraction (Husni and
Suryana, 2010). There are several obstacles, such as,
occlusion, illumination changes and other obstacles
that could influence detecting process, also there are
some difficulties in analyzing crowd event.
Nowadays, the use of surveillance systems are
higher in outside and inside environments, in pub-
lic or private buildings, to maintain the safety of the
users. But, considering this increase of equipment
(cameras in general), it is difficult to check up all im-
ages captured from the many cameras and it requires
many people to monitor all these images. Therefore,
techniques that develop an accurate and efficient ap-
plication to perform crowd event detection are very
important for this high-growth market.
Supported by previous arguments, in this position
paper we propose a initial development of a robust
system able to crowd event detection based on fea-
tures analysis from optical flow high-frequency com-
ponents. The Section 2 describes the main related
works about crowd event detection. In Section 3 and 4
the proposed methodology and initial results are pre-
sented, respectively. Conclusions and further work
are discussed in Section 5.
2 CROWD EVENT DETECTION
In according to (Liao et al., 2011; Ke et al., 2007),
crowd event detection is an important task in public
security. It has become a major issue in public places
such as subway stations, banks, squares, etc. (Li et al.,
2012) describes that in crowd surveillance videos,
event analysis is a critical research point. In this area,
it mainly contains the following issues: Firstly, it is
difficult to detect and track every identity indepen-
dently, because huge numbers of motion objects are
seriously occluded; Secondly, it is difficult to describe
the spatial relations of the objects.
In (Garate et al., 2009), when a single object is
difficult to be precisely detected and tracked in the
crowd scene, the common solutions directly depend
on the low-level video features analysis, through mo-
tion region detection and motion feature extraction.
For crowd event detection, there are some recent
works that describe automatic techniques to detect ex-
act timing when an event (as violence actions) occurs.
For example, in (Xu et al., 2014) it is proposed a Bag-
of-Words (BoW) classification model and a fusion be-
tween BoW and Motion SIFT (MoSIFT) algorithm to
improvethe previous method results showed in (Wang
et al., 2012). In (Esen et al., 2013), a new model of
motion feature, called Motion Co-Occurrence Feature
(MCF) and an energy model based, using informa-
tion from the velocity of the moving target estimated
by optical flow and entropy approach for the disorder
features.
629
G. S. de Almeida A., de Azevedo Faria V. and de Barros Vidal F..
Crowd Event Detection in Surveillance Video - An Approach based on Optical Flow High-frequency Feature Analysis.
DOI: 10.5220/0005355306290634
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 629-634
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
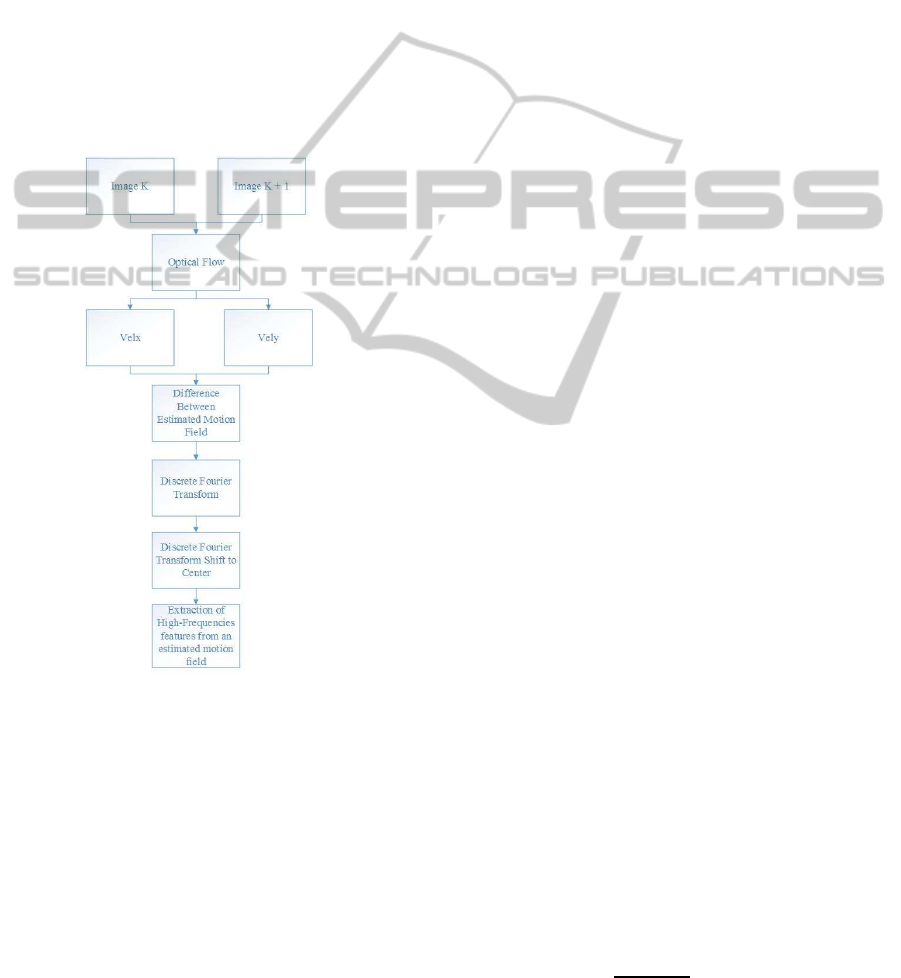
3 PROPOSED METHODOLOGY
For fight detection process in surveillance videos, we
performed to each frame form of the video theses
steps, as described in Figure 1: First, the Horn and
Schunck optical flow (Horn and Schunck, 1981) is ap-
plied; From the dense estimated optical flow, the ver-
tical and horizontal components are evaluated; The
two-dimensional Discrete Fourier Transform is used
in the estimated motion field (horizontal and vertical).
The Discrete Fourier Transform divides motion field
into components of low and high frequencies in spe-
cific regions.; Knowing that information, we propose
two different spatial slicing methods (rectangular and
squared) to extract the high and low frequencies com-
ponents from the estimated motion field.
Figure 1: Proposed Methodology fluxogram.
In the following Sections the main ideas are de-
scribed for each stage of the proposed methodology
to be able to achieve results from the proposed ap-
proach.
3.1 Image Sequence Input
In this approach, it was used only images from a gen-
eral surveillance video. A general surveillance video
is captured from a fixed camera found at many cities
nowadays (Kruegle, 2011). No other a priori infor-
mation about the scenes is used and all image infor-
mation processing is made in current video frame, de-
fined in temporal index by k + 1 and compared with
the anterior frame in time k.
3.2 Optical Flow
The optical flow approximates the image motion field
by representing the apparent motion of the image
brightness pattern on the image plane. In determin-
ing the optical flow, two aspects must be taken into
account. One is related to the accuracy level of data
concerning motion direction and intensity. The other
aspect encompasses certain properties related to the
computational load required for optical flow determi-
nation under minimal conditions of accuracy. The
compromisebetween these aspects depends on the sit-
uation and the expected results. The trade-offs be-
tween efficiency and accuracy in optical flow algo-
rithms are discussed by (Liu et al., 1998).
The methods of determining the optical flow can
be divided (Barron et al., 1994) in: a) differen-
tial techniques; b) region-based matching; c) energy-
based methods; and d) phase-based techniques. In
this approach we considered the differential tech-
niques. Among them, one has a particular interest;
it uses spatiotemporal derivatives of the image bright-
ness intensity defined by (Horn and Schunck, 1981).
3.2.1 Horn & Schunck Optical Flow Method
According to (Horn and Schunck, 1981), the optical
flow cannot be calculated at a point in the image inde-
pendently of neighboring points without introducing
additional constraints. This happens because the ve-
locity field at each image point has two components
while the change in brightness at that point due to mo-
tion yields only one constraint. Before describing the
method, certain conditions must be satisfied.
For convenience, it is assumed that the apparent
velocity of brightness patterns can be directly identi-
fied with the movement of surfaces in the scene. This
implies that, according the object surface that moves,
it does not exist (or there is a little) brightness varia-
tion. This happens, for example, with objects of radial
symmetry, low global contrast and high specular re-
flectance level. It is further assumed that the incident
illumination is uniform across the surface.
Denoting I(x, y, t) as the image brightness at time t
of the image point (x, y). During motion, it is assumed
that the brightness of a particular point is constant,
that means
dI(x, y, t)
dt
= 0 (1)
Expanding and rewriting the equation 1
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
630
I
x
u+ I
y
v+ I
t
= 0 (2)
where: I
x
, I
y
and I
t
represent partial derivatives of
brightness in x, y and t respectively; u and v are the
x− and y−velocity components.
Considering that, the brightness pattern can move
smoothly and independently of the rest of the scene,
there is a possibility to recover velocity information.
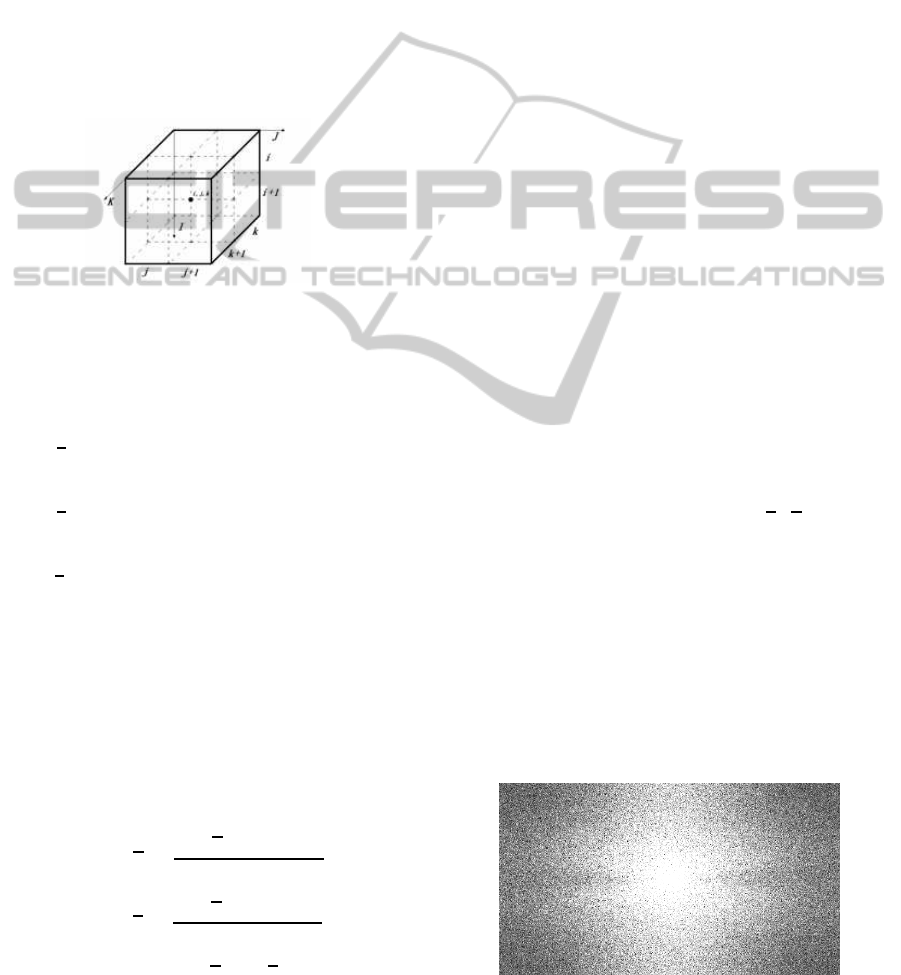
The partial derivatives of image brightness are es-
timated from the discrete set of image brightness mea-
surements. To avoid problems caused by zero values
for the derivatives in the spatio-temporal directions,
the point of interest is located at the center of a cube
formed by eight measurements as shown in figure 2
(Horn and Schunck, 1981).
Figure 2: Estimating image partial derivates.
Each of the partial derivatives is estimated as the
average of the four first differences taken over adja-
cent measurements
I
x
≈
1
4
I
i, j+1,k
− I
i, j,k
+ I
i+1, j+1,k
− I
i+1, j,k
+
I
i, j+1,k+1
− I
i, j,k+1
+ I
i+1, j+1,k+1
− I
i+1, j,k+1
I
y
≈
1
4
I
i+1, j,k
− I
i, j,k
+ I
i+1, j+1,k
− I
i, j+1,k
+
I
i+1, j,k+1
− I
i, j,k+1
+ I
i+1, j+1,k+1
− I
i, j+1,k+1
I
t
≈
1
4
I
i, j,k+1
− I
i, j,k
+ I
i+1, j,k+1
− I
i+1, j,k
+
I
i, j+1,k+1
− I
i, j+1,k
+ I
i+1, j+1,k+1
− I
i+1, j+1,k
(3)
The additional constraint for the velocity calcula-
tion results from the assumption of smoothness of the
velocity field.
A weighting factor α
2
is introduced to associate
the error magnitude with quantization errors and
noise.
The estimated values for velocities components to
u
k+1
and v
k+1
are obtained from
u
k+1
=
u
k
−
I
x
I
x
u
k
+ I
y
v
k
+ I
t
α
2
+ I
2
x
+ I
2
y
(4)
v
k+1
=
v
k
−
I
y
I
x
u
k
+ I
y
v
k
+ I
t
α
2
+ I
2
x
+ I
2
y
(5)
In equations (4) and (5)
u
k
and v
k
are the average
velocities estimated from the Laplacian of the bright-
ness pattern in iteration k, in which the neighboring
pixels values are weighted with the mask shown in
(Horn and Schunck, 1981).
3.3 Difference Between Estimated
Motion Field
After evaluating the Horn and Schunck optical
flow, two velocities components are estimated in
horizontal(Vel
x
) and vertical(Vel
y
) direction. These
components have the same size as the input image and
describe the motion field in the image domain.
To crowd fight detection process, we choose to
use the absolute difference between estimated flow
in k + 1 and k because in many situations, high lu-
minance changes in the surveillance camera systems
affect directly the proposed optical flow technique.
3.4 Discrete Fourier Transform
For high-frequency feature extraction we introduce
information from two-dimensional Discrete Fourier
Transform. The Discrete Fourier transform (DFT)
(Oppenheimet al., 1999) represents any discrete func-
tion with sums of sines and cosines. Using the inverse
discrete Fourier transform, it is possible to return to
the original function without losing information. In
image domain, it changes the domains from spatial
to frequency domain. The two-dimensional Discrete
Fourier Transform is described in Equation 6.
F(k, l) =
N−1
∑
i=0
N−1
∑
j=0
f(i, j)e
−i2π(
ki
N
+
l j
N
)
(6)
In according to Equation 6 whole frequencies (low
and high) spectrum are evaluated after transformation
and achieved from each sinusoidal components and
invariant from spatial image information. The high
frequencies are mostly concentrated in the borders,
while the low frequencies are in the center. For im-
proved classification purposes stage, after DFT trans-
formation all Vel
x
and Vel
y
are shifted to the center
(see Figure 3).
Figure 3: An example of vertical (Vel
y
) magnitude compo-
nents from DFT of estimated motion field.
CrowdEventDetectioninSurveillanceVideo-AnApproachbasedonOpticalFlowHigh-frequencyFeatureAnalysis
631
When shifting all magnitudes to the center, it al-
lows to invert the positions of high frequencies and
low frequencies spatially. In this way, high frequen-
cies components are in the borders of the magnitude
spectrum and low frequencies are in the middle of the
magnitude spectrum. The DFT shift procedure is a
very important stage for the classification based on
spatial feature from high-frequencies component.
3.5 Extraction of High-frequencies
Features from an Estimated Motion
Field
To perform crowd fighting detection in surveillance
video systems, we assume an hypothesis that when
in case of crowd fight occurrences many high-
frequencies components from the motion field have
amplitude changes (or have detectable amplitude
changes) in spatial dispersion, if compared to the orig-
inal spatial dispersion of theses components.
So in this stage we propose a spatial feature ap-
proach based on analysis only of the spatial disper-
sion, accounting in preliminary attempt changes in re-
gions where the high-frequency is located, discarding
regions that have elements of low frequencies proba-
bly are located in the spectrum.
In order to perform that, one method for spatial
high-frequencies features analysis is prepared based
on a division of the amplitude spectral region, is in
Vel
x
and Vel
y
directions, in an odd number of slices,
as described in Figure 4.
When great agitation (or any abnormal behav-
ior), high-frequencies amplitude coefficients should
increase and low-frequencies ones would became
weaker.
Figure 4: Vertical Slice Method.
For the vertical slice proposed method, Figure 4,
we have H for image height, W that indicates im-
age width, and NoS represents the quantity of desired
slices, or the number of slices.
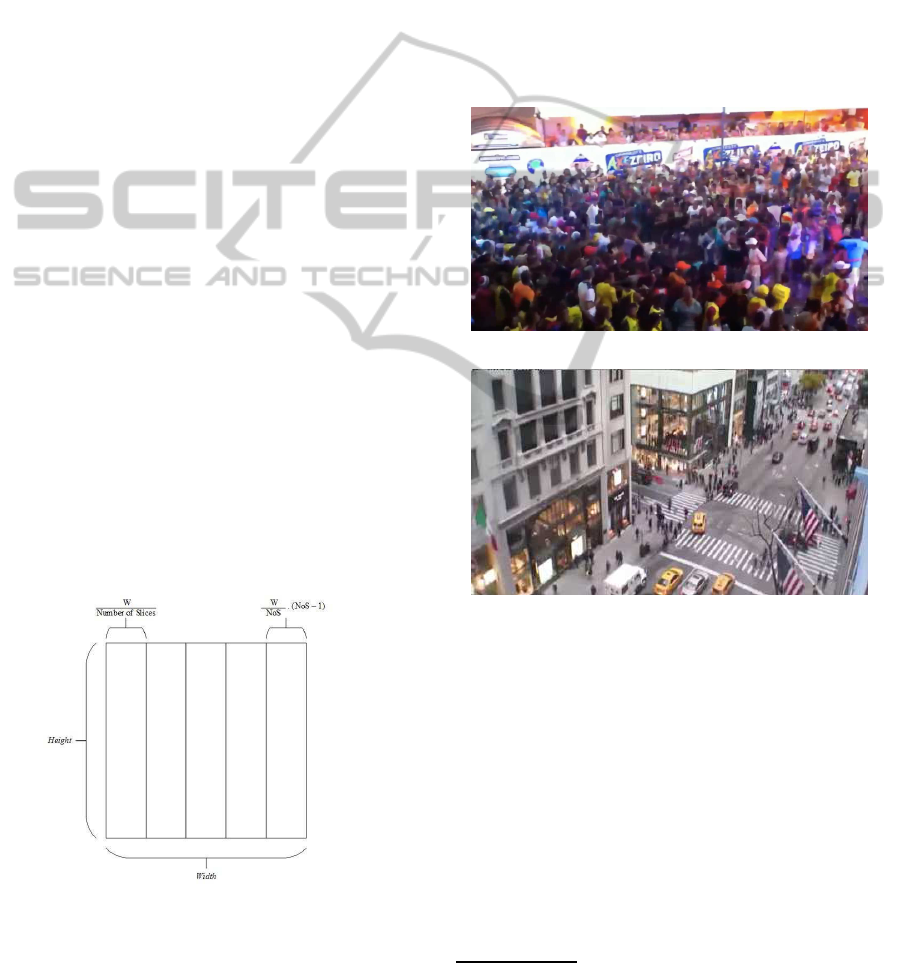
4 PRELIMINARY RESULTS
The proposed methodology was tested in twenty dif-
ferent video files, lasting thirty seconds each, in two
classes: A class called violence acts (ten videos); A
class called non-violence acts (ten videos). For exam-
ple, a non-violence class is a situation in which there
are many people crossing the street. Ten videos con-
taining both class types, violence and non-violence
acts, are used to validate the proposed methodology.
The Figures 5-(a) and (b) are screenshots images from
a violence and non-violence acts videos, respectively,
used to build the video database. All files were cap-
tured from public videos available on internet
1
.
(a) Violence acts video sequence.
(b) Non-violence acts video sequence.
Figure 5: Screenshot images from the used video database.
In this work it is easily noticed that the proposed
methodology, for a complete crowd event detection
in surveillance video, requires to develop a method-
ology of detecting and recognition. Therefore, the
preliminary results reported in this Section cover only
the minimum necessary conditions in towards to build
a stable feature descriptor able to be useful for the
recognition process.
Applying the methodology proposed in the pre-
vious Section 3, we can see variations in the high-
frequencycomponents from videos with violence acts
when compared to non-violence videos.
1
The videos used in Figure 5-(a) are available in https://
www.youtube.com/watch?v=dGGvCL9x6m8 and Figure 5-
(b) in https://www.youtube.com/watch?v=8Q6NmFb0KuU.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
632

(a) Original non-violence video (screenshot).
(b) Horizontal DFT amplitude components in
non-violence video.
(c) Vertical DFT amplitude components in
non-violence video.
Figure 6: Frequencies component extracted from a non-
violence video.
In order, when comparing the two Figures 6 and
7 (violence and non-violence), occurs many ampli-
tude variations and spatial dispersion of the high-
frequencycoefficients (border regions of the DFT am-
plitude image).
As indicated in Figures 6 and 7 that the high-
frequency components from the motion field can be
used to perform detection, and after the event recogni-
tion in crowds, two approaches are developed: One by
evaluate the relation about number of slices are used
and another by slices shape (rectangular and square).
4.1 Slice Number Tests
To evaluate the number of slices test, we calculate the
mean of high-frequency energy (horizontal and verti-
cal directions) of DFT components using 3, 5 and 11
rectangular slices, as described in Figure 8.
In Figure 8 the blue-mark is non-violence and red-
mark is violence video classes. The x and y axes de-
scribe the horizontal and vertical directions, respec-
tively.
Due to the spatial distribution feature of high-
frequency components of the motion field, after DFT
shift process, it is the main indicative information for
(a) Original violence video (screenshot).
(b) Horizontal DFT amplitude components in
violence video.
(c) Vertical DFT amplitude components in vi-
olence video.
Figure 7: Frequencies component extracted from a violence
video.
the event detection in crowds. The results in Figure
8 describes clearly a grouped cloud of points of the
same class (non-violence), while the other cloud of
points are spread in the graphic (violence class).
It is observed that in according to the slices shape
are obtained (rectangular), we can build a descriptor
that allows to discriminate videos between the vio-
lence and non-violence acts class in crowds. From
this evaluated descriptor we have evidences to be able
to classify using simple classifiers, as a Support Vec-
tor Machine or using an Artificial Neural Network.
5 CONCLUSIONS AND FURTHER
WORK
In this position paper we presented new strategies to
analyze howthe high-frequenciesof estimated motion
field and Discrete Fourier transform can give informa-
tion about crowd event detection. Using the graphics
and information showed in section 4, there are many
evidences that it is possible to create a stable and reli-
able classifier to solve the proposed problem.
The next research steps will be given in towards
of the exploration of slices shape and slice quantities
CrowdEventDetectioninSurveillanceVideo-AnApproachbasedonOpticalFlowHigh-frequencyFeatureAnalysis
633

(a) 3 rectangular slices energy.
(b) 5 rectangular slices energy.
(c) 11 rectangular slices energy.
Figure 8: Slice number test - Horizontal and vertical DFT
energy.
to achieve better results for the proposed descriptor.
Then all efforts will be concentrate on designing a ro-
bust and efficient classifier for a full crowd event de-
tection system.
Others works may include the implementation
of the proposed strategies on a high level program-
ming language in order to enable its operation in real
time scenarios (including timing analysis) using a real
videos and also perform more comparisons with the
latest techniques available in crowd event detection
and recognition.
REFERENCES
Barron, J. L., Fleet, D. J., and Beauchemin, S. S. (1994).
Performance of optical flow techniques. In Inter-
national Journal of Computer Vision, number 12:1,
pages 43–77.
Esen, E., Arabaci, M., and Soysal, M. (2013). Fight
detection in surveillance videos. In Content-Based
Multimedia Indexing (CBMI), 2013 11th International
Workshop on, pages 131–135.
Garate, C., Bilinsky, P., and Bremond, F. (2009). Crowd
event recognition using hog tracker. In Performance
Evaluation of Tracking and Surveillance (PETS-
Winter), 2009 Twelfth IEEE International Workshop
on, pages 1–6.
Horn, B. K. P. and Schunck, B. G. (1981). Determining op-
tical flow. In Artificial Intelligence, number 17, pages
185–204.
Husni, M. and Suryana, N. (2010). Crowd event detec-
tion in computer vision. In Signal Processing Systems
(ICSPS), 2010 2nd International Conference on, vol-
ume 1, pages V1–444–V1–447.
Ke, Y., Sukthankar, R., and Hebert, M. (2007). Event de-
tection in crowded videos. In Computer Vision, 2007.
ICCV 2007. IEEE 11th International Conference on,
pages 1–8.
Kruegle, H. (2011). CCTV Surveillance: Video Practices
and Technology. CCTV Surveillance Series. Elsevier
Science.
Li, G., Chen, J., Sun, B., and Liang, H. (2012). Crowd
event detection based on motion vector intersection
points. In Computer Science and Information Pro-
cessing (CSIP), 2012 International Conference on,
pages 411–415.
Liao, H., Xiang, J., Sun, W., Feng, Q., and Dai, J. (2011).
An abnormal event recognition in crowd scene. In
Image and Graphics (ICIG), 2011 Sixth International
Conference on, pages 731–736.
Liu, H., Hong, T., Herman, M., Camus, T., and Chellappa,
R. (1998). Accuracy vs efficiency trade-offs in opti-
cal flow algorithms. In Computer Vision and Image
Understanding, number 72:3, pages 271–286.
Oppenheim, A. V., Schafer, R. W., and Buck, J. R. (1999).
Discrete-time Signal Processing (2Nd Ed.). Prentice-
Hall, Inc., Upper Saddle River, NJ, USA.
Wang, D., Zhang, Z., Wang, W., Wang, L., and Tan, T.
(2012). Baseline results for violence detection in still
images. In Advanced Video and Signal-Based Surveil-
lance (AVSS), 2012 IEEE Ninth International Confer-
ence on, pages 54–57.
Xu, L., Gong, C., Yang, J., Wu, Q., and Yao, L. (2014).
Violent video detection based on mosift feature and
sparse coding. In Acoustics, Speech and Signal Pro-
cessing (ICASSP), 2014 IEEE International Confer-
ence on, pages 3538–3542.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
634
