
Social-based Forwarding of Messages in Sensor Networks
Basim Mahmood, Marcello Tomasini and Ronaldo Menezes
BioComplex Laboratory, Department of Computer Science, Florida Institute of Technology, Melbourne, U.S.A.
Keywords:
Social Networks, Social Network of Sensors, Human Mobility.
Abstract:
As we adopt the Internet of Things (IoT), the boundaries between sensor and social networks are likely to
disappear. However, to this date, the use of social networks in the design of wireless sensor network protocols
has not received much attention. In this paper, we focus on the concept of information dissemination in a
framework where sensors are carried by people who are part of a social network. We propose two social-based
forwarding approaches for what has been called Social Network of Sensors (SNoS). To this end, we exploit
two important characteristics of ties in social networks, namely strong ties and weak ties. The former is used
to achieve rapid dissemination to nearby sensors while the latter aims at dissemination to faraway sensors.
1 INTRODUCTION
Wireless Sensor Networks (WSNs) are an important
area of research because they relate to many applica-
tions in the areas of transportation, military and agri-
culture. A typical WSN consists of many small de-
vices deployed over a geographical area, where each
device is called a Sensor and can measure environ-
mental or physical conditions (e.g., temperature) in
a particular area of interest. The structure of WSNs
can be static or dynamic. In a static WSN, sensors
are stationary while in a dynamic WSN, a sensor’s
position is subject to change. In this work, we de-
sign social-based approaches for message forwarding
in SNoS (Tomasini et al., 2013) inspired by the con-
cept of strong ties and weak ties. Following the def-
inition and the hypothesis of Granovetter (Granovet-
ter, 1973), we proposed information forwarding ap-
proaches to achieve nearby spreading of information,
called Strong-Ties-Based Forwarding (STBF), and
to achieve faraway spreading of information, called
Weak-Ties-Based Forwarding (WTBF).
2 RELATED WORKS
The idea behind data forwarding in WSNs is to mini-
mize the consumption of network resources by choos-
ing appropriate receivers (relays) in the forwarding
process (Lambrou and Panayiotou, 2009). In the net-
work literature, several forwarding approaches have
been described implementing different strategies.
Epidemic forwarding was proposed by Vahdat and
Becker (Vahdat et al., 2000). Data messages are sent
to all network nodes in the communication range of
a particular node, all nodes are guaranteed to receive
all data messages in the network. This approach has a
high level of flooding due to the number of messages
exchanged which leads to waste network resources.
Yet, the Epidemic approach is widely used to bench-
mark other protocols.
PRoPHET was proposed by Lindgren et al. (Lind-
gren et al., 2003) and is based on a node’s history of
encounters, which means that if a node i encounters
another node j frequently, node i is more likely to en-
counter node j again in the future. With the encounter
ratios, a delivery predictability is calculated for each
node destination, the value of the delivery predictabil-
ity represents the chance to deliver a message to a par-
ticular destination.
Social ties in social networks have been studied by
Granovetter (Granovetter, 1973) who argued that so-
cial relations come in two kinds: strong and weak ties.
In social networks, these ties are used for different
purposes but weak ties are mostly important for indi-
viduals to receive information from faraway locations
in their network. These types can also be defined in
the context of SNoS based on the sensor’s encounter
frequencies. That is, the strong ties of sensor i are the
other sensors whose encounter frequency to i is high.
By contrast, the weak ties are formed to those sensors
that have low encounter frequencies with sensor i.
85
Mahmood B., Tomasini M. and Menezes R..
Social-based Forwarding of Messages in Sensor Networks.
DOI: 10.5220/0005327700850090
In Proceedings of the 4th International Conference on Sensor Networks (SENSORNETS-2015), pages 85-90
ISBN: 978-989-758-086-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

3 THE MODEL
We initially start with an environment that represents
a squared city of (6.2 × 6.2) sq. miles divided in
to squared blocks (100× 100 blocks). We deployed
2,040 mobile sensors in the environment, exponen-
tially distributed from the center of the city (envi-
ronment) since most metropolises follow this popula-
tion distribution (Grossman-Clarke et al., 2005). The
event that is used in the measuring of the informa-
tion dissemination is generated in a random location
which is then considered the center of the dissemina-
tion (for the purposes of measuring distances). The
communication between sensors is peer-to-peer. The
communication range of sensors (sensors’ radius) is
55 yards (50 meters) in line Wi-Fi communication
range. In the simulation environment, each sensor
moves at a fixed speed of 1 block per tick (a tick is
equal to 1.2 minute in real time considering the nor-
mal human walking speed is ≈ 3.1 miles/h (≈ 5 km/h)
(Fitzpatrick et al., 2006). Sensors move according to
the Individual Mobility model proposed by Song et
al. (Song et al., 2010) because this model has the abil-
ity to accurately describe the characteristics of human
mobility. We provide the average of 100 runs for each
approach. The simulations stop when 90% of the net-
work knows about the event.
We proposed two novel forwarding approaches,
namely Strong-Ties-Based Forwarding (STBF) and
Weak-Ties-Based Forwarding (WTBF). These ap-
proaches are used for information dissemination,
where the spreading process is based on relation type
between sender and receiver(strong or weak relation).
Our proposal is that sensors can maintain the strength
of ties to use the strength to achieve different dissem-
ination patterns.
Each sensor in the simulation has to be able to
keep track of encounters with other sensors. For each
sensor, all encounters are memorized in a dynamic list
T
i
, where i represents a particular sensor in the en-
vironment. The items in this list represent the IDs
(e.g. MAC addresses) of the encountered sensors.
Each sensor has another dynamic list which is derived
from the T
i
list: the CST
i
list (the list of cumulative
strong ties) contains the sensors (candidates sensors)
that have strong ties with sensor i while the CWT
i
list
(the list of cumulativeweak ties) contains this list con-
tains the sensors (candidates sensors) that have weak
ties with sensor i. These derived lists are used respec-
tively by the STBF and WTBF approaches.
In STBF, we extract the strong ties for each sen-
sor from the T
i
list. As mentioned, the strong ties
emerge with people we associate with frequently and
frequency does not correlate with friendship. This
means, the strength of a tie represents frequency and
not affinity between two individuals. The friendship
relation between two individuals may be derived from
the strength of the relation, but the distribution of
these encounters and their regularity also play a role
(Bulut and Szymanski, 2010; Vaz de Melo et al.,
2013; Bai and Helmy, 2004). For the purposes of
this work, friendship definition is not important, but
rather frequency; most of us meet many people fre-
quently without considering them as friends (e.g., at
work). The strong ties of a sensor can be extracted
by taking the higher frequency sensors in its history
of encounters (T
i
list). This process can be performed
based on the so-called “80/20” rule (Newman, 2005).
This rule states that for many observations, approxi-
mately 80% of the effects caused by the other 20%.
This rule is common in economical and natural pro-
cesses, for example, 80% of a company’s sales come
from 20% of its clients. Statistically, this rule is ap-
plicable to the applications that follow a power law
distribution (Newman, 2005). Based on this statistical
phenomenon(since the degree distribution of nodes in
our model follows a power law distribution), for each
sensor i we take the higher 20% frequencies items of
the T
i
list at time t, and inserting the corresponding
sensor ID into the CST
i
in which contains the ID’s of
the sensors that have the higher frequencies (strong
ties) of the T
i
list.
In WTBF, we insert the sensor ID of the lower
80% frequencies items of the T
i
list into the CWT
i
list
(weak ties). This process is performed by each sen-
sor at every time step of the simulation. In order to
have values that are statistically significant, we em-
ploy (i) atraining procedure where we let all sensors
freely move in the environment in the absence of any
event for 100 time steps—this procedure represents a
proactive step before executing any of the approaches
we used in this work aiming to create a history of en-
counters and initiating the T
i
list for each sensor; then
we execute a (ii) checking procedure, at every time
step t and for each sensor i, the decision of insert-
ing an items into the CST
i
and CWT
i
lists is based on
Algorithm 1 which describes whether an element is
included in the CST
i
or in the CWT
i
of a particular
sensor. In our algorithm, we take into considerations
that a weak tie may, in the future, become a strong
tie. In this case, we remove this item from CWT
i
and
insert it into the CST
i
.
Once sensors have their CST
i
and CWT
i
lists (can-
didates lists), they can be used in the forwarding pro-
cess of STBF and WTBF respectively. This means a
sensor forwards data only to other sensors that are in
their candidates list. Furthermore, to carry out the for-
warding process, three conditions must be validated:
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
86
Algorithm 1: Algorithm for inserting a sensor ID into the
CST
i
and CWT
i
. Note that t represents time.
for all ID ∈ higher 20% frequencies in T
i
(t) do
if ID 6∈ CST
i
then
add ID to CST
i
end if
if ID ∈ CWT
i
then
remove ID from CWT
i
end if
end for
for all ID ∈ lower 80% frequencies in the T
i
(t) do
if ID 6∈ CWT
i
then
add ID to CWT
i
end if
end for
• The receiver must not have the event.
• The forwarder and the receiver must be in the
communication range of each other.
• The receiver must be in the candidates list of the
forwarder.
The two approaches described (STBF and WTBF)
are designed to work in two modes:
Full Mode. In this mode, a sensor, i, forwards data
to all sensors in its candidates list (CST
i
and CWT
i
lists in STBF and WTBF respectively).
Partial Mode. A sensor has a predefined number of
sensor(s) to forward data to (we used 1 to 5 re-
ceivers). These receivers must be selected from
sensor’s candidates list (CST
i
and CWT
i
).
4 EXPERIMENTAL RESULTS
We benchmark the proposed approaches by highlight-
ing their behavior according to two criteria: data-
spreading distance and data-spreading coverage area.
Moreover, for a deeper evaluation, we considered dif-
ferent scenarios for the Epidemic and PRoPHET ap-
proaches. In Epidemic forwarding, we forced it to
work in multiple mode in addition to its default work-
ing mode (all). In the default mode a sensor spreads
data randomly to all other sensors in its communica-
tion range, while in the multiple mode, we involve 1
to 5 receivers instead of considering all sensors as re-
ceivers. In PRoPHET, we involved 2 to 5 receivers
rather than 1 (the default working mode).
4.1 Spreading Distance
The control of the spread distance is the main contri-
bution of our approaches. We have proposed the two
approaches aiming at having some control of the dis-
tance the event generated in a sensor will travel. The
hypothesis that we adapted from social networks is
that strong ties will restrict the forwarding to nearby
sensors while the use of weak ties will spread the
information to the farthest distances; spread to far
distances may be useful to certain applications (e.g.,
emergency warnings).
The findings show that the farthest possible dis-
tance from the center of the simulation environment
can be obtained using the default mode of Epidemic
(up to 2.85 miles), followed by the full mode of
WTBF (up to 2.67 miles), and then by the full mode
of STBF (up to 2.26 miles), and finally, the default
mode of PRoPHET (up to 2.05 miles). This means
that WTBF can disseminate information to locations
as far as the ones done by a full Epidemic model.
For a detailed view to their behavior, we tested the
partial mode of STBF and WTBF, and the multiple-
message mode of the benchmarking approaches un-
der different number of receivers. It should be clar-
ified that in Epidemic, when spreading to 1 sensor,
this sensor may have a strong tie to the forwarder be-
cause Epidemic discards the type of ties during the
spreading process. Therefore, this case may limit the
forwarding process to include only the surrounded
area (e.g., same group or community). Whereas in
WTBF, when spreading to 1 receiver, the receiver
will definitely have a weak tie to the forwarder. For
this reason, the partial mode version of WTBF with
1 receiver outperforms Epidemic and the other ap-
proaches as shown in Figure 1; this is a very inter-
esting result because it demonstrates that if we want
to maintain a low message overhead, WTBF can be a
better alternative for message dissemination to far lo-
cations than even Epidemic. Moreover, being able to
replicate such behavior in the context of mobile sen-
sor networks (or SNoS) confirms the idea that a weak
tie plays a significant role in data flowing to different
social communities by acting as a bridge or a broker
(Granovetter, 1973).
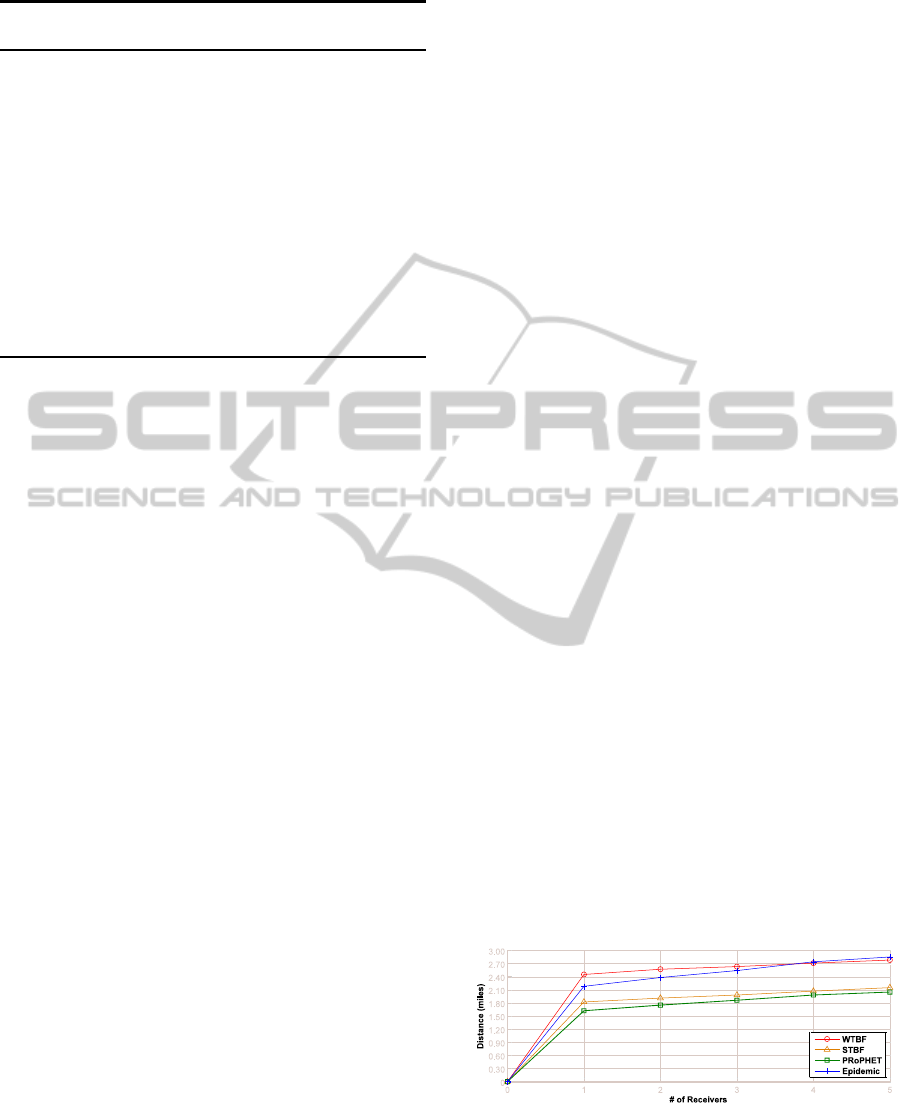
Figure 1: Overall behavior in terms of spreading distance
when varying the number of receivers in each approach.
Furthermore, the results also show that the partial
mode of STBF underperforms the multiple mode of
Epidemic, and outperforms PRoPHET. Yet, the goal
Social-basedForwardingofMessagesinSensorNetworks
87
of STBF is to restrict the dissemination to nearby lo-
cations so the “underperforming” is actually the de-
sired outcome for STBF. In more details, Figure 1 ex-
hibits the average spreading distance that can be ob-
tained for each approach using different number of
receivers. We noticed that each approach reaches the
equilibrium when the number of receivers approxi-
mates 4 sensors, this can be interpreted as an indicator
of the convergence between both modes of the pro-
posed approaches at this level of receivers. However,
this exact level may vary depending on sensor density
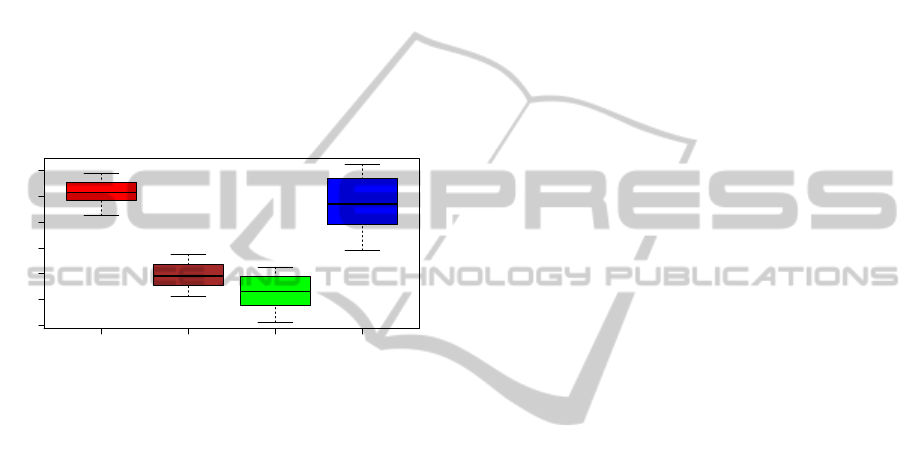
within the simulation environment. In Figure 2 we
show the range of the distances that can be reached
for each approach. This figure also shows the lowest
and highest distances, the lower and upper quartiles,
and the median for each approach.
WTBF STBF PRoPHET Epidemic
1.6 2.0 2.4 2.8
Distance (miles)
Figure 2: The average distances for the full modes and par-
tial modes (using 1, 2, 3, 4, and 5 receivers) of the proposed
approaches and the single and multiple message modes of
the benchmarking approaches (using 1 to 5 receivers).
Figure 2 also allows us to observe that the varia-
tions achieved in WTBF and STBF are smaller than
the competition. WTBF can be said to be more re-
liable with the range of distance the event will reach
than Epidemic because the variance is smaller. Con-
versely, although PRoPHET can limit the spread to
very short distances, the variance is quite high when
compared to STBF.
4.2 Coverage Area
Data forwarding approaches try to cover as much area
as possible in the network environment. The effi-
ciency of these approaches in terms of coverage area
depends on the size of the area they cover which
in general should be maximized, and the consump-
tion of network resources which should be minimized
(Gaudette et al., 2014). Recall that our simulation en-
vironment is 38.61 sq. miles (or a square of 6.2× 6.2
miles). In this evaluation, we calculate the minimum
and the maximum areas that can be covered by the
event during the spreading process, these areas can be
defined as follows:
Minimum Coverage Area: part of the area that is
always under the coverage of data spreading.
Maximum Coverage Area: part of the area which is
not always under the coverage of data spreading
but has been reached at least once.
As mentioned, we have 100 runs for each ap-
proach in our experiments, each run gives a particular
coverage area. The intersection region of these ar-
eas represents the minimum coverage area, while the
union of all the runs represents the maximum cover-
age area. We can clearly see that the disparity in the
areas between the minimum and the maximum is very
small (Figure 3). Table 1, illustrates the obtained re-
sults and their proportion to the environment area for
each approach. We observe the following points:
• Minimum and maximum areas that can be cov-
ered using WTBF and Epidemic are very close.
• WTBF outperforms PRoPHET and STBF. This is
expected since we want STBF to dissimulate the
event around the location where it appeared.
• The intensity of data spreading is very high in Epi-
demic and very low in WTBF.
• STBF covers more area than PRoPHET in both
the maximum and the minimum coverage area.
However, STBF has higher intensity in data
spreading than PRoPHET.
Given that STBF is proposed to avoid the spread-
ing of information to faraway places, we had to inves-
tigate a little more what was taking place as the result
above seems to negate our hypothesis of strong ties
being useful for information dissemination to nearby
locations. However, results in Figure 3 can be a side-
effect of the settings of our model which stops when
90% of the network knows about the event.
Hence, we changed the stop condition to be in-
dependent of the number of sensors knowing about
the event. We provide two other tests (each of 100
runs) with different stop conditions. First, running
the simulator for 100 time ticks (Test 2) and then for
50 time ticks (Test 3). Figures 4 and 5 show mini-
mum and maximum coverage area for each approach.
We can observe that the disparity between the mini-
mum and the maximum areas is more prominent than
what we see in Figure 3. These new results reflect
better the behavior of both WTBF and STBF confirm-
ing the hypothesis that weak ties spread events farther
than strong ties. Tables 2 and 3 show the results of
100 ticks and 50 ticks respectively, and their propor-
tion to the environment area. Lastly, we measured the
proportion of the minimum to the maximum cover-
age area of each approach for every test. Clearly, the
proportions for 100 ticks and 50 ticks resemble Gra-
novetter’s work better than the experiment using 90%
of the sensors as shown in Table 4.
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
88
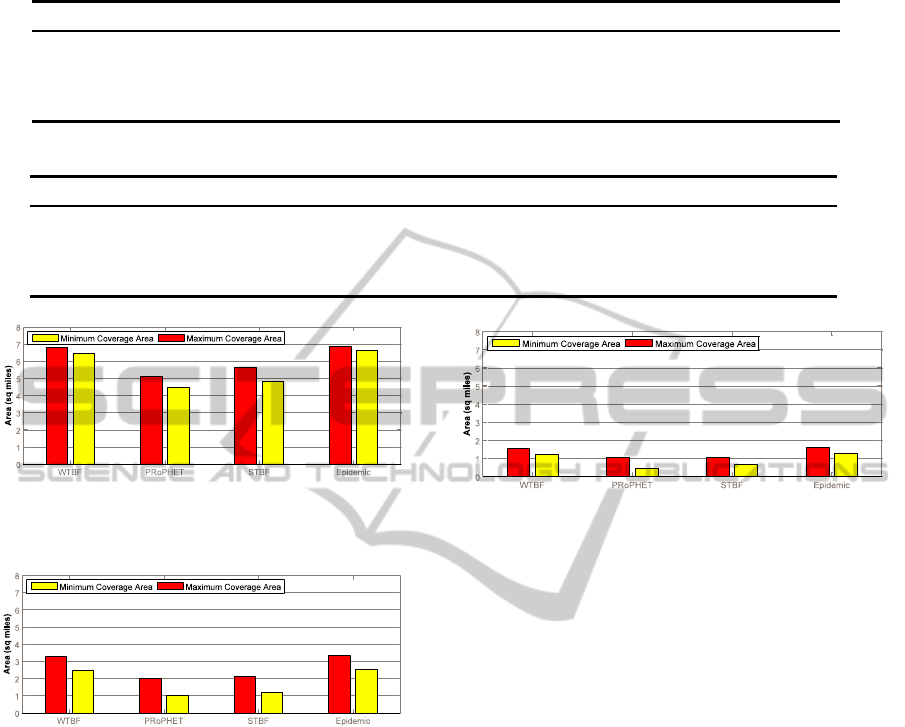
Table 1: Minimum and maximum coverage areas with the experiment runs until 90% of the sensors know about the event.
Epidemic PRoPHET STBF WTBF
Maximum Coverage Area Area (sq. mile) 6.87 5.09 5.62 6.80
the proportion to the total area 17.80% 13.20% 14.55% 17.60%
Minimum Coverage Area Area (sq. mile) 6.62 4.49 4.82 6.43
the proportion to the total area 17.15% 11.64% 12.50% 16.65%
Table 2: Minimum and maximum coverage area when the simulation runs for 100 ticks.
Epidemic PRoPHET STBF WTBF
Maximum Coverage Area Area (sq. mile) 3.36 2.01 2.13 3.27
the proportion to the total area 8.72% 5.20% 5.51% 8.47%
Minimum Coverage Area Area (sq. mile) 2.55 1.04 1.21 2.48
the proportion to the total area 6.60% 2.70% 3.13% 6.42%
Figure 3: Minimum and the maximum coverage area when
using the simulator with a condition to stop based on 90%
of the sensors knowing about the event.
Figure 4: minimum and maximum coverage area when us-
ing the settings of the experiment in which the sensors are
allowed to work for 100 ticks of the simulation.
5 CONCLUSIONS AND FUTURE
WORKS
We analyzed the proposed protocols based on two
criteria: data-spreading distance and data-spreading
coverage area. Furthermore, we measured the inten-
sity of message-spreading in the environment and de-
livery time for all the approaches in this work. We
can summarize STBF and WTBF approaches by giv-
ing some recommendations when designing a SNoS:
• If the goal is to forward data to the farthest dis-
tance, the best option is to use the partial mode
of WTBF, because its results reflect a good per-
formance in terms of distance and the number of
messages exchanged. However, we should not ig-
Figure 5: minimum and maximum coverage area when us-
ing the settings of the experiment in which the sensors are
allowed to work for 50 ticks of the simulation.
nore the fact that WTBF approach spends more
time than the other approaches.
• If we are looking to forward data to a wider cover-
age area with low data spreading intensity we can
choose WTBF.
• If the goal is reducing the number of messages
exchanged within the network, we recommend
WTBF approach.
In this work, we did not investigate the issue
spreading direction. However, as the future work, we
are planning to investigate this issue using our pro-
posed approaches. It is important to find whether the
social network reconstructed from IM models lead to
a bias towards certain directions in the environment.
Finally, the environment we currently use does not
assume the existence of barriers or obstacles which
may be common in urban environments. It may be
interesting to investigate how the proposed forward-
ing mechanisms perform under configurations with
obstacles (representing, for instance, buildings in a
city). We believe the results will not change because
the mobility model used has been shown to approxi-
mate human mobility in urban areas. In fact, the data
used to evaluate the IM model comes from real cellu-
lar data in large cities.
Social-basedForwardingofMessagesinSensorNetworks
89
Table 3: Minimum and maximum coverage area when the simulation runs for only 50 ticks.
Epidemic PRoPHET STBF WTBF
Maximum Coverage Area Area (sq. mile) 1.62 1.05 1.06 1.56
the proportion to the total area 4.21% 2.73% 2.74% 4.04%
Minimum Coverage Area Area (sq. mile) 1.30 0.47 0.68 1.22
the proportion to the total area 3.37% 1.22% 1.76% 3.15%
Table 4: proportion of the minimum to the maximum coverage area for all the approaches using all three experiments.
Epidemic PRoPHET STBF WTBF
90% of the sensors reached 96.3% 88.2% 85.7% 94.5%
Simulation runs for 100 ticks 75.8% 51.7% 56.8% 75.8%
Simulation runs for 50 ticks 80.2% 44.7% 64.1% 78.2%
REFERENCES
Bai, F. and Helmy, A. (2004). A survey of mobility mod-
els. Wireless Adhoc Networks. University of Southern
California, USA, 206.
Bulut, E. and Szymanski, B. K. (2010). Friendship based
routing in delay tolerant mobile social networks.
In Global Telecommunications Conference (GLOBE-
COM 2010), 2010 IEEE, pages 1–5. IEEE.
Fitzpatrick, K., Brewer, M. A., and Turner, S. (2006). An-
other look at pedestrian walking speed. Transporta-
tion Research Record: Journal of the Transportation
Research Board, 1982(1):21–29.
Gaudette, B., Hanumaiah, V., Krunz, M., and Vrudhula, S.
(2014). Maximizing quality of coverage under con-
nectivity constraints in solar-powered active wireless
sensor networks. ACM Trans. Sen. Netw., 10(4):59:1–
59:27.
Granovetter, M. S. (1973). The strength of weak ties. Amer-
ican journal of sociology, pages 1360–1380.
Grossman-Clarke, S., Zehnder, J. A., Stefanov, W. L., Liu,
Y., and Zoldak, M. A. (2005). Urban modifications in
a mesoscale meteorological model and the effects on
near-surface variables in an arid metropolitan region.
Journal of Applied Meteorology, 44(9):1281–1297.
Lambrou, T. P. and Panayiotou, C. G. (2009). A survey on
routing techniques supporting mobility in sensor net-
works. In Mobile Ad-hoc and Sensor Networks, 2009.
MSN’09. 5th International Conference on, pages 78–
85. IEEE.
Lindgren, A., Doria, A., and Schel´en, O. (2003). Proba-
bilistic routing in intermittently connected networks.
ACM SIGMOBILE Mobile Computing and Communi-
cations Review, 7(3):19–20.
Newman, M. E. (2005). Power laws, pareto distributions
and zipf’s law. Contemporary physics, 46(5):323–
351.
Song, C., Koren, T., Wang, P., and Barab´asi, A.-L. (2010).
Modelling the scaling properties of human mobility.
Nature Physics, 6(10):818–823.
Tomasini, M., Zambonelli, F., and Menezes, R. (2013). Us-
ing patterns of social dynamics in the design of social
networks of sensors. In 2013 IEEE and Internet of
Things (iThings/CPSCom), pages 685–692. IEEE.
Vahdat, A., Becker, D., et al. (2000). Epidemic routing for
partially connected ad hoc networks. Technical report,
Technical Report CS-200006, Duke University.
Vaz de Melo, P. O., Viana, A. C., Fiore, M., Jaffr`es-Runser,
K., Le Mou¨el, F., and Loureiro, A. A. (2013). Recast:
Telling apart social and random relationships in dy-
namic networks. In Proceedings of the 16th ACM in-
ternational conference on Modeling, analysis & simu-
lation of wireless and mobile systems, pages 327–334.
ACM.
SENSORNETS2015-4thInternationalConferenceonSensorNetworks
90
