
Horizontal Stereoscopic Display based on Homologous Points
Bruno Eduardo Madeira
1,3
, Carlos Frederico de S
´
a Volot
˜
ao
2
, Paulo Fernando Ferreira Rosa
1
and Luiz Velho
3
1
Departement of Computer Engineering, Instituto Militar de Engenharia, Rio de Janeiro, Brazil
2
Departement of Cartographic Engineering, Instituto Militar de Engenharia, Rio de Janeiro, Brazil
3
Visgraf Laboratory, Instituto Nacional de Matem
´
atica Pura e Aplicada, Rio de Janeiro, Brazil
Keywords:
3D Stereo, Camera Calibration, Phantograms.
Abstract:
In this paper we establish the relation between camera calibration and the generation of horizontal stereoscopic
images. After that, we introduce a new method that handles the problem of generating stereoscopic pairs
without using calibration patterns, instead we use the correspondence of homologous points. The method is
based on the optimization of a measure that we call Three-dimensional Interpretability Error, which has a
simple geometric interpretation. We also prove that this optimization problem has four global minima, one of
which corresponds to the desired solution. After that, we present techniques to initialize the problem avoiding
the convergence to a wrong global minimum. Finally, we present some experimental results.
1 INTRODUCTION
The stereoscopic technology is getting more and
more common nowadays, as a consequence this kind
of technology is becoming cheaper and widely ac-
cessible to people in general, (de la Rivire, 2010;
Yoshiki Takeoka, 2010).
Most stereoscopic applications use simple adap-
tations of non-stereoscopic concepts in order to give
the observer the sense of depth. This is true, for exam-
ple, in the case of 3D movies where two versions are
usually released, one to be watched in a stereoscopic
movie theater and other to be watched in a normal
theater.
We are exploring the use of stereoscopic technol-
ogy changing the usual paradigm that tries to give the
observer the “Sense of Depth” to the new paradigm
that gives the observer the “Sense of Reality”. We
call Sense of Reality when besides giving a sense of
depth to the image, the setting is presented in such
a way that it is compatible with real objects in the
real world. Normal 3D movies do not implement the
“Sense of Reality” because of the following reasons:
• The screen is limited, thus, points in the border
can be shown without the stereo correspondence.
It is not a problem if the whole scene is “inside”
the screen, but it is a problem if the scene is over
the screen.
• The objects presented in a movie are usually float-
ing in space, because the scene is not grounded to
the real world floor.
• Many scenes usually present a very large range of
depth, which cannot be exhibited by the current
stereoscopic technology.
• The zoom parameter of the camera is usually cho-
sen in order to capture the scene in the same way
as a regular movie, which in consequence magni-
fies portions of the scene.
The above aspects make it difficult for the ob-
server to believe that the content, although presented
in 3D, is actually real. To be physically plausible the
content presented in the screen must make sense when
viewed as part of the environment that surrounds it.
This goal can be achieved by making four changes to
the stereoscopic system:
• Presenting the 3D Stereo Content on an Hor-
izontal Support Leveling the Floor with the
Screen.
It establishes a link between virtual objects and
the screen. This link makes the result more reli-
able compared to the exhibition of virtual objects
flying in front of a vertical screen.
• Not Presenting a Scene Whose Projected Points
in the Border of the Screen are Closer to the
Observer than the Screen.
531
Madeira B., Volotão C., Rosa P. and Velho L..
Horizontal Stereoscopic Display based on Homologous Points.
DOI: 10.5220/0005299905310542
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 531-542
ISBN: 978-989-758-091-8
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

If a 3D point on the left or right border of the
screen is closer to the observer than the screen,
then one of its correspondent stereoscopic projec-
tions will not be exhibited due to the screen lim-
itation. That means that it will generate a stereo-
scopic pair that does not correspond to a 3D scene.
If the stereoscopic projections of an object cross
the top border, but do not cross the laterals, then
the scene will not be well accepted by the ob-
server either, although the stereoscopic pair cor-
responds to a 3D scene. In this case, the prob-
lem is that the border limitation corresponds to
a 3D cut in the object, that makes the top of the
projection be perfectly aligned with the top bor-
der of the screen. Besides the fact that the 3D
cut makes the scene odd, there is the fact that the
alignment between the border and the cut implies
that the observer had to be placed in a very spe-
cific position in order to be able to see it, it means
that the stereoscopic projections are images that
do not satisfies the generic-viewpoint assumption
(Marr, 1982), that can cause interpretation prob-
lems, such as presented in Figure 1-b. Finally, if
the stereoscopic projections cross the bottom bor-
der, then they will suffer from the same problems
as those that cross the top border, plus the fact that
they will correspond to floating objects.
• Constraining the Scale of the Scene Based on
Some Physical Reference.
It can be achieved by changing the cinematogra-
phy technique. For example, 3D stereo movies
adopt the classic film language used for 2D films.
As a consequence, it employs different framing
techniques, such as close-ups, medium and long
shots that cause the objects in a scene to change
size relative to the screen. This practice impairs
the sense of reality with the physical world. such
problem is avoided by establishing a fixed scaled
correspondence between the displayed scene and
the real environment.
• Restricting the Field of View to Encompass the
Objects in the Scene.
In standard 3D stereo movies, the fact that the
cameras are positioned parallel to the ground im-
plies in a wide range of depth, including elements
far from the center of interest of the scene. Con-
versely, in stereoscopic images produced for dis-
play over a table the camera will be oriented at
an oblique angle in relation to the ground, which
limits the maximum depth of the scene and favors
the use of stereoscopic techniques.
In short, in order to produce the “Sense of Reality”
it is necessary to use a stereoscopic display disposed
Figure 1: (a) An image that satisfies all requirements to pro-
duce the “Sense of Reality”. (b) An image whose border
produces a cut in the scene that affect the tridimensional
interpretation.
in a horizontal position, taking care with the scene
setup. For example, Figure 1-a illustrates a case in
which all the requirements to produce the “Sense of
Reality” are satisfied.
The idea of generating stereoscopic images for
being displayed in an horizontal surface is not new.
Many devices that use Computer Graphics for gen-
erating horizontal stereoscopic images have already
appeared in the scientific literature, such as presented
in (Cutler et al., 1997), (Leibe et al., 2000), (Ericsson
and Olwal, 2011) and (Hoberman et al., 2012). On the
other hand, the case of horizontal stereoscopic images
generated by Image Processing is a subject not much
discussed. Our bibliographic research shows that it
has firstly appeared in the patent literature in (Wester,
2002) and (Aubrey, 2003) in a not very formal treat-
ment. As far as we know, the first scientific paper
that handled this problem formally is (Madeira and
Velho, 2012). This paper shows that the generation
of horizontal stereoscopic images can be interpreted
as a problem of estimation and application of homo-
graphies, and it proposes the use of Computer Vision
techniques to estimate them. It uses the establishment
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
532
of 3D-2D correspondences between 3D points of a
calibration pattern and their respective 2D projections
over images.
We have not found any reference about a method
for generating horizontal stereoscopic pairs without
using calibration patterns, so we decided to attack this
problem just using homologous points, giving more
flexibility to the user. We solved it minimizing a mea-
sure that we call by Three-dimensional Interpretabil-
ity Error, which has a simple geometric interpretation.
We also prove that this optimization problem has four
global minima, one of which corresponds to the de-
sired solution. After that, we present techniques to
initialize the optimization process avoiding the con-
vergence to a wrong global minimum.
We have tested the method and achieved good re-
sults.
2 HOMOGRAPHIES AND
CAMERA PARAMETERS
Lets consider the problem of generating a stereo-
scopic pair designed for being presented over an hor-
izontal surface.
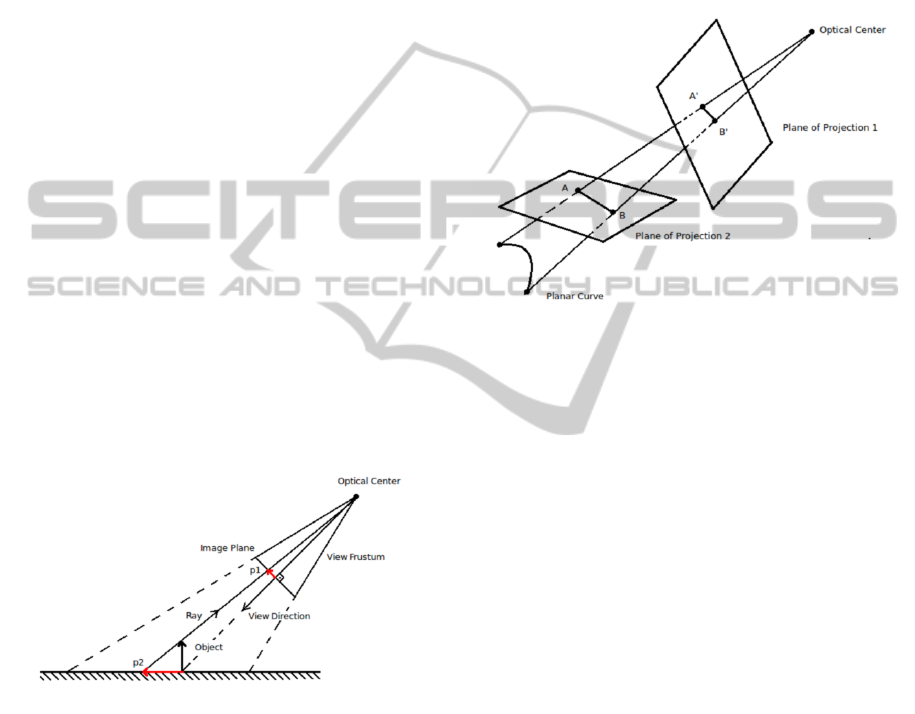
Suppose that there is a camera in an oblique posi-
tion capturing the projection p1 of an object over an
horizontal surface ( Figure 2 ). We need to find a way
Figure 2: The rays emitted by the object and passing
through the eye have the same color as the correspondent
point in the horizontal surface.
to compute the projection p2, that corresponds to the
projection of the object using the same optical center
as the one used for capturing p1 but replacing the pro-
jective plane by the horizontal surface. It makes the
rays emitted by the object and passing through the eye
have the same color as the correspondent point in the
horizontal surface, thus the eye sees the same image
whether it came from the real object or from p2.
It is easy to notice, by examining Figure 3, that
if a set of points in a scene is projected by a cam-
era over a set of collinear projections, then they keep
collinear if we maintain the optical center in the same
place and change the position of the projection plane.
It happens because the rays whose intersection gen-
erate these projections must be coplanar, and if the
optical center is unchanged they still have to be used
for defining the projections over the plane in the new
position. Since the rays are coplanar, the intersection
of them with any plane must be collinear.
Figure 3: This example shows a curve whose projection
over a projection plane is collinear. As a consequence, it
is also collinear if we change the projection plane and keep
the optical center unchanged.
This result implies that there is a homography re-
lating the coordinates of projections, measured over
the images captured by the cameras pointed to the ob-
ject to be captured, and the coordinates of the projec-
tions, made by using the same optical center as center
of projection and using the planar support as projec-
tion plane. It means that, the projections p1 and p2,
presented in Figure 2, are related by a homography.
Lets suppose that there is a 3D coordinate system
located on the horizontal plane, such that the x-axis
and y-axis are on the plane. Lets consider that the
camera used for capturing the image of the object over
the plane is defined in this coordinate system by a pro-
jective transform T : RP
3
→ RP
2
given by
T = K
r
11
r
12
r
13
t
1
r
21
r
22
r
23
t
2
r
31
r
32
r
33
t
3
,
where K is the matrix of intrinsic parameters.
We can establish a homography H between the
horizontal plane and the image plane by restricting
the domain of T to the xy-plane. More specifically,
H = K
r
11
r
12
t
1
r
21
r
22
t
2
r
31
r
32
t
3
.
HorizontalStereoscopicDisplaybasedonHomologousPoints
533
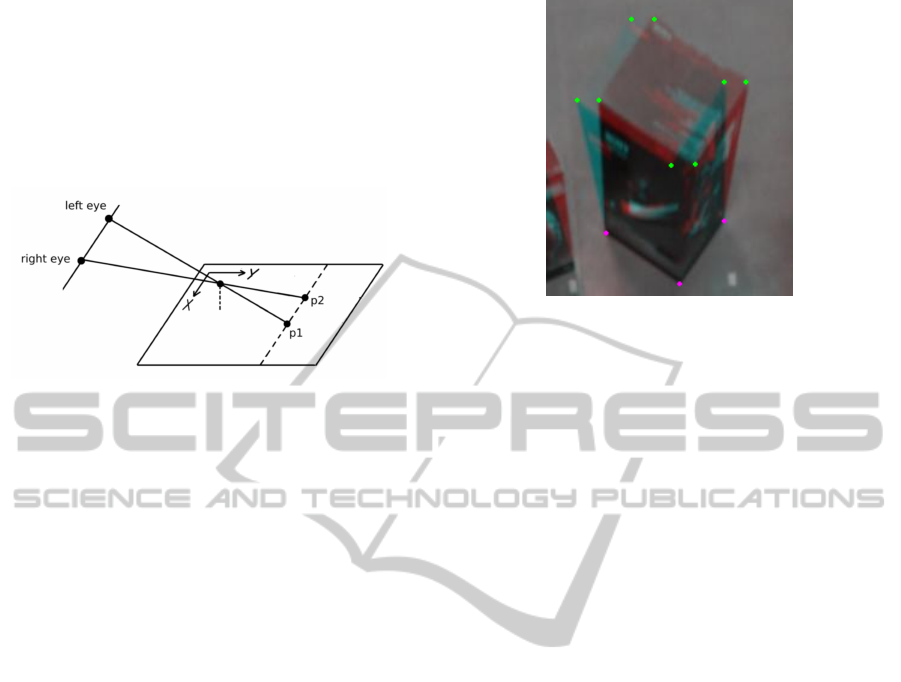
Each possible choice of x-axis and y-axis on
the horizontal plane will define a different homogra-
phy. The choices that are adequate for generating the
stereoscopic effect are the ones that will make homol-
ogous points have the same y-coordinate. It happens
when the x-axis is parallel to the line passing through
the eyes of the observer and the y-axis is orthogonal (
Figure 4 ).
Figure 4: An adequate choice of x and y axis. The x-axis
is parallel to the line passing through the eyes of the ob-
server, and the homologous points p1 and p2 have the same
y-coordinate.
This link between the camera model and homo-
graphies shows that the problem of finding the ho-
mographies appropriated for generating horizontal
stereoscopic pairs can be solved by calibrating the
camera using an adequate coordinate system over the
horizontal plane.
3 THE THREE-DIMENSIONAL
INTERPRETABILITY ERROR
It is easy to notice that any stereoscopic pair prepared
for being observed in a horizontal position must sat-
isfy the following constraints.
1. homologous points that are leveled to the horizon-
tal surface must be coincident.
2. homologous points that are not leveled to the hor-
izontal surface must have the same y-coordinate.
In order to fix notation, we assume that the ho-
mologous pairs of points that correspond to 3D points
leveled to the horizontal surface are points of Type I,
and the ones that are not leveled are points of Type
II. And we also assume that the 3D point is classified
in the same group as its respective homologous pair.
The Figure 5 illustrates the constraints related to each
type.
We define the Three-dimensional Interpretability
Error as a measure of how the constraints related to
points of Types I and II are being satisfied. More
precisely, lets suppose that {(p
1
,
ˆ
p
1
),...,(p
n
,
ˆ
p
n
)}
is a set of homologous pairs of Type I and
Figure 5: An anaglyph of a cube prepared for being pre-
sented in horizontal position. The green dots are homolo-
gous pairs of Type II. Each pair is formed by points with
the same y-coordinate. The pink dots are coincident homol-
ogous points, they are homologous pairs of Type I.
{(q
1
,
ˆ
q
1
),...,(q
m
,
ˆ
q
m
)} is a set of homologous pairs
of Type II. We define the Three-dimensional Inter-
pretability Error as
α
n
∑
i=1
kp
i
−
ˆ
p
i
k
2
+ β
m
∑
j=1
(q
i
−
ˆ
q
i
)
2
y
,
where α ∈ R defines the importance of the con-
straints of Type I, and β ∈ R defines the importance
of the constraints of Type II.
4 THE IMPORTANCE OF THE
INTRINSIC PARAMETERS
It is obvious that any stereoscopic pair presented
horizontally must have the Three-dimensional Inter-
pretability Error equals to zero, for any considered set
of homologous point. A non obvious question is:
If we find homographies that make a pair of
captured images have the Three-dimensional Inter-
pretability Error equals to zero, can we assume that
the generated stereoscopic pair represents the 3D
scene correctly ?
The answer is: No. If H
1
and H
2
produce a stereo-
scopic pair with Three-dimensional Interpretability
Error equal to zero, then MH
1
and MH
2
also gener-
ate a stereoscopic pair with Three-dimensional Inter-
pretability Error equal to zero, if
M =
α
1
0 0
0 α
2
0
0 0 1
,
with α
1
∈ R − {0}, α
2
∈ R − {0} and α
1
6= α
2
.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
534
As presented in Section 2, the correct estimation
of homographies corresponds to the correct calibra-
tion of the camera pair, but the possibility of assigning
α
1
and α
2
to different values means that the intrinsic
parameters of the camera are not well defined, such
as presented in the Figure 6. It means that we cannot
calibrate the intrinsic parameters by minimizing the
Three-dimensional Interpretability Error.
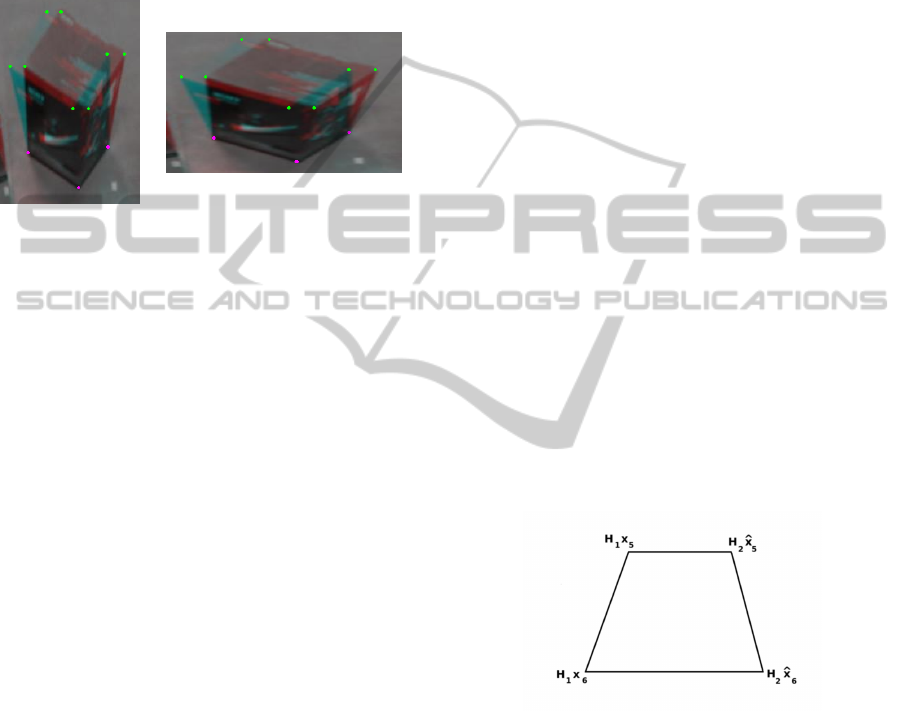
Figure 6: Both pictures present stereoscopic pairs whose
Three-dimensional Interpretability Error is zero. The dif-
ference between them is the intrinsic parameters of the cam-
eras related to each applied homography.
5 FOUR GLOBAL MINIMA
In the previous section we concluded that it is not suf-
ficient to find the pair of homographies that makes the
Three-dimensional Interterpretability Error equal to
zero in order to generate the correct horizontal stereo-
scopic pair, because we can find different results re-
lated to different choices of intrinsic parameters.
Now we present a Theorem that shows that if we
fix the correct intrinsic parameters, there are just 4
different pairs of homographies that make the Three-
dimensional Interterpretability Error equal to zero. It
is important because it means that, if we know the
intrinsic parameters, and if we choose a parametriza-
tion for the cameras that fix them, we can estimate
the homographies minimizing the Three-dimensional
Interterpretability Error. We just have to initiate the
optimization process sufficiently close to the correct
minimum in order to avoid the convergence to one of
the 3 incorrect solutions.
Theorem 1. Lets suppose that at least 4 pairs of ho-
mologous points of Type I and 2 pairs of homologous
points of Type II are known. If there is a pair of homo-
graphies H
1
and H
2
that makes the points of Type I be
coincident and that makes the points of Type II have
the same y-coordinate then, keeping the intrinsic pa-
rameters unchanged, there are exactly other 3 pairs
of homographies, defined with an ambiguity of trans-
lation, that also do it. Moreover, these pairs have the
form W H
1
and W H
2
, where W can be:
1 0 ∗
0 −1 ∗
0 0 1
!
,
−1 0 ∗
0 1 ∗
0 0 1
!
or
−1 0 ∗
0 −1 ∗
0 0 1
!
.
Proof
H
1
and H
2
are homographies that make the homolo-
gous points satisfy their constraints. Lets suppose that
W
1
H
1
and W
2
H
2
also do this.
Lets suppose that {(x
1
,
ˆ
x
1
), ..., (x
4
,
ˆ
x
4
)} are 4 pairs
of homologous points of Type I. Since H
1
e H
2
make
the homologous points of Type I be coincident we
have that, ∃y
1
, ..., y
4
∈ RP
2
such that:
H
1
x
i
= H
2
ˆ
x
i
= y
i
, where i ∈ {1, 2, 3, 4}. (1)
W
1
H
1
and W
2
H
2
also make the homologous points
of Type I be coincident thus:
W
1
y
i
= W
2
y
i
, where i ∈ {1, 2, 3, 4}. (2)
Since the range of 4 points by W
1
and W
2
are
equals we have, by the Fundamental Theorem of Pro-
jective Geometry, that W
1
= W
2
.
In order to fix the notation, lets define the homog-
raphy W by:
W = W
1
= W
2
. (3)
Lets (x
5
,
ˆ
x
5
) and (x
6
,
ˆ
x
6
) be two pairs of homolo-
gous points of Type II.
Because H
1
and H
2
map homologous points of
Type II over points with the same y-coordinate we
have that {H
1
x
5
, H
1
x
6
, H
2
ˆ
x
5
, H
2
ˆ
x
6
} define the ver-
tices of a trapezium with two sides parallel to the x-
axis, as shown in Figure 7.
Figure 7: Trapezium whose sides defined by the vertices
H
1
x
5
and H
2
ˆ
x
5
and the side defined by the vertices H
1
x
6
and H
2
ˆ
x
6
are parallel to the x-axis.
Since W H
1
and W H
2
also map homologous points
of Type II over points with the same y-coordinate, it
is necessary that W maps the trapezium over other
trapezium with sides parallel to the x-axis. It means
that, ∃λ ∈ R such that
W (1, 0, 0)
T
= (λ, 0, 0)
T
. (4)
Therefore, W has the form
W =
λ a d
0 b e
0 c f
. (5)
HorizontalStereoscopicDisplaybasedonHomologousPoints
535

W H
1
and W H
2
must be homographies that cor-
respond to cameras whose intrinsic parameters are
the same as the one related to the homographies H
1
and H
2
. In other words, lets consider the vectors
t, t
0
∈ R
3
and the rotation matrices R = (r
1
r
2
r
3
) and
R
0
= (r
0
1
r
0
2
r
0
3
) such that
H
−1
1
= K(r
1
r
2
t) (6)
and
H
−1
2
= K(r
0
1
r
0
2
t
0
), (7)
it must exist vectors
ˆ
t,
ˆ
t
0
∈ R
3
and rotation matrices
ˆ
R = (
ˆ
r
1
ˆ
r
2
ˆ
r
3
) and
ˆ
R
0
= (
ˆ
r
0
1
ˆ
r
0
2
ˆ
r
0
3
) such that
H
−1
1
W
−1
= K(
ˆ
r
1
ˆ
r
2
ˆ
t) (8)
and
H
−1
2
W
−1
= K(
ˆ
r
0
1
ˆ
r
0
2
ˆ
t
0
). (9)
Thus, we have
(r
1
r
2
t) = (
ˆ
r
1
ˆ
r
2
ˆ
t)
λ a d
0 b e
0 c f
(10)
and
(r
0
1
r
0
2
t
0
) = (
ˆ
r
0
1
ˆ
r
0
2
ˆ
t
0
)
λ a d
0 b e
0 c f
. (11)
From the equations 10 and 11 we have
r
1
= λ
ˆ
r
1
(12)
and
r
0
1
= λ
ˆ
r
0
1
, (13)
from which we conclude that λ = 1 or λ = −1.
Lets consider the case λ = 1. The case λ = −1 can
be analyzed analogously. In this case we have that
r
1
=
ˆ
r
1
(14)
and
r
0
1
=
ˆ
r
0
1
. (15)
The vector
ˆ
r
2
is orthogonal to
ˆ
r
1
, as a conse-
quence, from the equation 14 we have that it is also
orthogonal to the vector r
1
. That means, ∃m
1
, m
2
∈ R
such that
ˆ
r
2
= m
1
r
2
+ m
2
r
3
. (16)
Analogously, ∃m
0
1
, m
0
2
∈ R such that
ˆ
r
0
2
= m
0
1
r
0
2
+ m
0
2
r
0
3
. (17)
We have that {r
1
, r
2
, r
3
} is a base to R
3
, as well as
{r
0
1
, r
0
2
, r
0
3
}. So ∃k
1
, k
2
, k
3
, k
0
1
, k
0
2
, k
0
3
∈ R such that:
ˆ
t = k
1
r
1
+ k
2
r
2
+ k
3
r
3
(18)
and
ˆ
t
0
= k
0
1
r
0
1
+ k
0
2
r
0
2
+ k
0
3
r
0
3
. (19)
From the equations 10 and 11 we have
r
2
= ar
1
+ b(m
1
r
2
+ m
2
r
3
) + c(k
1
r
1
+ k
2
r
2
+ k
3
r
3
)
(20)
and
r
0
2
= ar
0
1
+ b(m
0
1
r
0
2
+ m
0
2
r
0
3
) + c(k
0
1
r
0
1
+ k
0
2
r
0
2
+ k
0
3
r
0
3
).
(21)
As a consequence, we have that
a + ck
1
= 0, (22)
a + ck
0
1
= 0, (23)
bm
1
+ ck
2
= 1, (24)
bm
0
1
+ ck
0
2
= 1, (25)
bm
2
+ ck
3
= 0 (26)
and
bm
0
2
+ ck
0
3
= 0. (27)
Now we will show that m
2
= 0 and m
0
2
= 0.
Lets suppose, by contradiction, that m
2
6= 0. From
the equations 22 and 23 we conclude that
ck
1
= ck
0
1
, (28)
thus c = 0 or k
1
= k
0
1
.
If c = 0, we have from the equation 26 that b = 0,
which contradicts the equation 24, which states that
bm
1
= 1.
If k
1
= k
0
1
then
h
ˆ
t, r
1
i = k
1
= k
0
1
= h
ˆ
t
0
, r
0
1
i. (29)
Lets assume that c
1
∈ R
3
is the optical center
of the camera related to the homography W H
1
, and
c
2
∈ R
3
is the optical center related to the homogra-
phy W H
2
. We have that
h
ˆ
t, r
1
i = h
ˆ
t,
ˆ
r
1
i = h−
ˆ
Rc
1
,
ˆ
r
1
i = h−c
1
,
ˆ
R
T
ˆ
r
1
i =
= h−c
1
, (1, 0, 0)
T
i = (−c
1
)
x
.
(30)
We can rewrite the equation 29 as
(c
1
)
x
= (c
2
)
x
. (31)
Since two points of Type II are mapped over
points with the same y-coordinate, it is necessary that
(c
1
)
y
= (c
2
)
y
and (c
1
)
z
= (c
2
)
z
, then we conclude that
c
1
= c
2
. (32)
Because the optical centers are equal, it follows
that the images of the stereoscopic pair captured by
the cameras must be related by a homography, which
is a contradiction with the fact that the images have
been captured by cameras whose optical centers were
located in different places. It means that m
2
= 0. A
similar reasoning can be used to show that m
0
2
= 0.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
536

From the equations 16 and 17 we conclude that
ˆ
r
2
= r
2
or
ˆ
r
2
= −r
2
(33)
and
ˆ
r
0
2
= r
0
2
or
ˆ
r
0
2
= −r
0
2
. (34)
From the equations 12 and 13 we have, because λ
can be assigned to 1 or −1, that
ˆ
r
1
= r
1
or
ˆ
r
1
= −r
1
(35)
and
ˆ
r
0
1
= r
0
1
or
ˆ
r
0
1
= −r
0
1
. (36)
So W must have one of the following formats:
1 0 ∗
0 1 ∗
0 0 1
,
1 0 ∗
0 −1 ∗
0 0 1
,
−1 0 ∗
0 1 ∗
0 0 1
or
−1 0 ∗
0 −1 ∗
0 0 1
.
Moreover, it is clear that, if H
1
and H
2
satisfy the
constraints of point of Type I and II, then all these four
options for W make WH
1
and WH
2
also do it. Thus,
it is necessary and sufficient that W takes one of these
four formats.
6 THE LEAST SQUARE
PROBLEM
Lets assume that the matrix of intrinsic parameters
K is known. In this section we define a least square
problem for finding the extrinsic parameters that min-
imize the Three-dimensional Interterpretability Error.
Lets suppose that two images I
1
and
I
2
are captured by a pair of cameras, and
{(u
1
, v
1
),...,(u
n
, v
n
)} is a set of points of Type I
and {(u
n+1
, v
n+1
), (u
n+2
, v
n+2
),...,(u
m
, v
m
)} is a set
of points of Type II, such that u
i
∈ I
1
and v
i
∈ I
2
.
Lets assume that the extrinsic parameters of the
camera used for capturing I
1
is R
1
and t
1
and for cap-
turing I
2
is R
2
and t
2
where
R
1
=
r
11
r
12
r
13
r
21
r
22
r
23
r
31
r
32
r
33
,
t
1
= (β
1
, β
2
, β
3
)
T
,
R
2
=
r
0
11
r
0
12
r
0
13
r
0
21
r
0
22
r
0
23
r
0
31
r
0
32
r
0
33
and
t
2
= (δ
1
, δ
2
, δ
3
)
T
.
We define the objective function by
α
n
∑
i=1
kW
1
u
i
−W
2
v
i
k
2
+ β
m
∑
i=n+1
(W
1
u
i
−W
2
v
i
)
2
y
where
W
−1
1
= K
r
11
r
12
β
1
r
21
r
22
β
2
r
31
r
32
β
3
and
W
−1
2
= K
r
0
11
r
0
12
δ
1
r
0
21
r
0
22
δ
2
r
0
31
r
0
32
δ
3
.
We can solve this problem using the Levenberg-
Marquardt algorithm. We find the extrinsic parame-
ters R
1
, R
2
and t
2
fixing the vector t
1
. If we did not
fix t
1
neither t
2
then the value of the objective function
would reduce to zero when (t
1
)
z
→ ∞ and (t
2
)
z
→ ∞.
Besides that, by fixing t
1
we do not reduce the gen-
erality of the solution, because we just define the po-
sition and the scale of one image of the stereoscopic
pair.
We highlight that an appropriate parametrization
of the space of rotations is required for solving this
problem. In our experiments we chose a parametriza-
tion based on an axis-angle representation.
7 FINDING THE INITIAL
PARAMETERS
We can find the initial extrinsic parameters for the
least square problem defined in the previous section
using the following process:
1. Take two samples R
1
and R
2
from the space of
rotations.
2. Use R
1
and R
2
and two pairs of homologous
points to find the translations t
1
and t
2
.
We repeat this process with different choices for
R
1
and R
2
, and we select the extrinsic parameters
{R
1
,R
2
,t
1
,t
2
} that make the Three-dimensional Intert-
erpretability Error have the minimum value. This pro-
cess explores the fact that the space of rotation is lim-
ited, thus it can be sampled.
We must avoid getting samples R
1
and R
2
that
are too far from the expected correct solution. We
must keep in mind that, by the Theorem 1, there are 3
wrong pairs of rotations that also minimize the Three-
dimensional Interterpretability Error. Fortunately the
wrong rotations are far away from the correct ones (
180 degrees ).
In the next section we explain how to find t
1
and t
2
using two pairs of homologous points, and assuming
that R
1
and R
2
are defined.
HorizontalStereoscopicDisplaybasedonHomologousPoints
537

8 USING HOMOLOGOUS POINTS
TO FIND THE TRANSLATIONS
Lest suppose that I
1
and I
2
are images, (a, b)
T
∈ I
1
and (c, d)
T
∈ I
2
are the coordinate in pixels of the ho-
mologous points of Type I that correspond to a point
m
1
on the horizontal plane, and that (e, f )
T
∈ I
1
and
(g, h)
T
∈ I
2
are another pair of homologous points of
Type I that correspond to a point m
2
on the horizontal
plane.
We want to find the vectors t = (t
1
, t
2
, t
3
)
T
∈ R
3
and t’ = (t
0
1
, t
0
2
, t
0
3
)
T
∈ R
3
that correspond to the trans-
lations used for capturing I
1
and I
2
.
Lets define H
1
and H
2
as the homographies that
map points with coordinates measured on the hori-
zontal surface into pixels in the images I
1
and I
2
, re-
spectively. That means
H
1
= (h
1
h
2
h
3
) = K
r
11
r
12
t
1
r
21
r
22
t
2
r
31
r
32
t
3
(37)
and
H
2
= (h
0
1
h
0
2
h
0
3
) = K
r
0
11
r
0
12
t
0
1
r
0
21
r
0
22
t
0
2
r
0
31
r
0
32
t
0
3
. (38)
We can choose any point over the horizontal plane
to be the origin of the coordinate system used for
defining the camera parameters. Lets assume that m
1
is this point. By doing this, the point whose coor-
dinates are (0, 0)
T
is mapped by H
1
over the pixel
(a, b)
T
in the image I
1
, and is mapped by H
2
over the
pixel (c, d)
T
in the image I
2
. It means that
(h
1
h
2
h
3
)
0
0
1
= λ
1
a
b
1
(39)
and
(h
0
1
h
0
2
h
0
3
)
0
0
1
= λ
2
c
d
1
, (40)
where λ
1
, λ
2
∈ R are scalars that must be found.
Thus
h
3
= λ
1
(a, b, 1)
T
and
h
0
3
= λ
2
(c, d, 1)
T
.
It means that, t and t
0
are defined up to the scale
factors λ
1
and λ
2
, because
t = K
−1
h
3
(41)
and
t
0
= K
−1
h
0
3
. (42)
We use the other pair of homologous points to cal-
culate λ
1
and λ
2
. Since t and t’ are defined with an
ambiguity of one scale factor (Hartley and Zisserman,
2004), we just expect to calculate
λ
2
λ
1
.
Lets define
P =
p
T
1
p
T
2
p
T
3
(43)
as the inverse of the homography
h
1
h
2
a
b
1
,
and lets
Q =
q
T
1
q
T
2
q
T
3
(44)
be the inverse of the homography
h
0
1
h
0
2
c
d
1
.
It is easy to notice that P and Q can be calculated,
because we are assuming that the matrix of intrinsic
parameters K and the rotations related to each camera
are known.
We have that
H
−1
1
=
p
T
1
p
T
2
1
λ
1
p
T
3
(45)
and
H
−1
2
=
q
T
1
q
T
2
1
λ
2
q
T
3
. (46)
Applying the homography H
−1
1
over (e, f )
T
and
H
−1
2
over (g, h)
T
we must obtain the same point on
the horizontal plane. This means that, there is a scalar
λ
3
∈ R such that
p
T
1
p
T
2
1
λ
1
p
T
3
e
f
1
= λ
3
q
T
1
q
T
2
1
λ
2
q
T
3
g
h
1
.
(47)
There follows from the equation in the first line
that
λ
3
=
hp
1
, (e, f , 1)
T
i
hq
1
, (g, h, 1)
T
i
. (48)
From the equation in the third line we have that
1
λ
1
hp
3
, (e, f , 1)
T
i =
λ
3
λ
2
hq
3
, (g, h, 1)
T
i. (49)
Replacing the equation 48 in the equation 49 we
find that
λ
2
λ
1
=
hp
1
, (e, f , 1)
T
i
hp
3
, (e, f , 1)
T
i
hq
3
, (g, h, 1)
T
i
hq
1
, (g, h, 1)
T
i
. (50)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
538

9 FINDING THE SIZE OF THE
OUTPUT
We know that any calibration process performed us-
ing just the information of homologous points has an
ambiguity of scale (Hartley and Zisserman, 2004). As
a consequence, in the previous section we just could
find homographies that generate stereoscopic pairs
with an ambiguity of size.
This problem can be solved, for example, if the
following extra information is available:
• The distance l between the optical centers of the
cameras, in both poses, used for capturing the
stereoscopic pair.
• The distance between two points m
1
and m
2
in the
horizontal plane, that correspond to two identifi-
able pixels p
1
and p
2
.
The scale of the output must be chosen in such a
way that the ratio of the distance between p
1
and p
2
and the distance between the eyes becomes equal to
the ratio of the distance between the points m
1
and m
2
and the distance l.
For example, lets suppose that the distance l is
65m, and the distance between m
1
and m
2
is 20m.
Since the distance between the eyes of a person is
about 6.5cm, there follows that the output scale must
be chosen in such a way that that the distance between
p
1
and p
2
become 2cm.
If any geometric information about the scene is
available, the scale can be adjusted by a trial and error
method until a good perceptual result be achieved.
10 EXPERIMENTS WITH
SYNTHETIC DATA
We made 630 experiments in order to find the ho-
mographies, minimizing the Three-dimensional Inter-
pretability Error, using synthetic cameras and points.
It means that the projections used were perfectly cal-
culated by the computer. The initialization method
used for the Levenberg-Marquardt algorithm was the
one described in the previous sections.
The experiments were divided into 15 groups
whose poses of the synthetic cameras used in the cal-
culation of projections were the same.
In each group, we calculated the distance between
a pair of reference homographies, found using 10
points of Type I and 10 points of Type II, and ho-
mographies calculated by using combinations with a
smaller number of points.
We know that the reference homographies were
found by a determined optimization problem, because
they were calculated using more points than the suf-
ficient condition defined by the Theorem 1. In order
to guarantee that the the Levenberg-Marquardt algo-
rithm converges to the correct global minimum, we
limited the rotations used in the sampling processes
of synthetic cameras and the rotations used during
the initialization of the optimization. We did this,
because we need to be confident that the sector of
the space of rotations considered contains only one
pair of cameras with Three-dimensional Interpretabil-
ity Error equals to zero.
We measured the distance between the pairs of ho-
mographies using the formula
||H
1
− H
0
1
|| + ||H
2
− H
0
2
||,
were H
1
and H
2
are the homographies that are being
compared to the references homographies H
0
1
and H
0
2
.
The norm considered to a matrix is its largest eigen-
value. Since the matrix representation of homogra-
phies are defined up to a scale factor, we put all the
homographies in the form
∗ ∗ ∗
∗ ∗ ∗
∗ ∗ 1
before applying the formula.
The results of the 15 experiments are presented in
the tables of the Appendix. In each table, the cells’
values are the distance between the reference homo-
graphies and the solution calculated using a different
combination of points of Type I and II defined by the
cell’s position. The number of points of Type I is pre-
sented in the left of the table, and the number of points
of Type II is presented in the top.
We joined the information of all 15 tables in the
Table 1. Each cell of this table correspond to the
amount of tables from the Appendix whose corre-
spondent cell’s value is below 10
−4
, which is the
threshold chosen to consider that the the solution
agrees with the reference homographies.
We read the number of points of Type I and II in
the border of the Table 1 following the same logic of
the tables in the Appendix.
In order to analyze the Table 1 we must take into
a count that:
1. If there is a 0 in a cell, it means that any of the
15 considered solutions agrees with the reference
solution. Thus, the amount of points of Type I
and II related to the cell’s position is, probably,
not enough for making the optimization problem
well defined.
2. It there is a number different from 0 in a cell, it
means that there is an agreement between a so-
lution and the reference. If this number is large,
HorizontalStereoscopicDisplaybasedonHomologousPoints
539
we can conclude that it happened in many tables,
meaning that probably the solution of the opti-
mization problem is well defined for the amount
of points of Type I and II related to the cell’s po-
sition. This number can be different from 15, be-
cause a local minimum can be found, once we are
using a sparse sampling in the initialization, since
we had to solve hundreds of optimization prob-
lems.
Table 1: Each cell of this table corresponds to the amount of
tables from the Appendix whose correspondent cell’s value
is below 10
−4
, which is the threshold chosen to consider
that the the solution agrees with the reference homogra-
phies.
0 1 2 3 4 5 6
2 0 0 0 0 0 11 15
3 0 0 0 10 12 13 13
4 0 10 11 12 14 14 14
5 0 12 14 14 14 13 13
6 0 12 13 14 14 13 13
7 0 14 15 15 15 14 15
By analyzing the Table 1, we conclude that the
experimental result is in agreement with the Theorem
1. But we discover that, probably, 4 points of Type I
an 2 points of Type II is not a minimal combination
for solving the problem of finding the correct homo-
graphies by minimizing the Three-dimensional Inter-
pretability Error. Moreover, we establish the Conjec-
ture 1.
Conjecture 1. The minimal combinations of points
that make the Theorem 1 still valid are:
• 2 points of Type I and 5 points of Type II;
• 3 points of Type I and 3 points of Type II;
• 4 points of Type I and 1 point of Type II.
11 EXPERIMENT WITH REAL
IMAGES
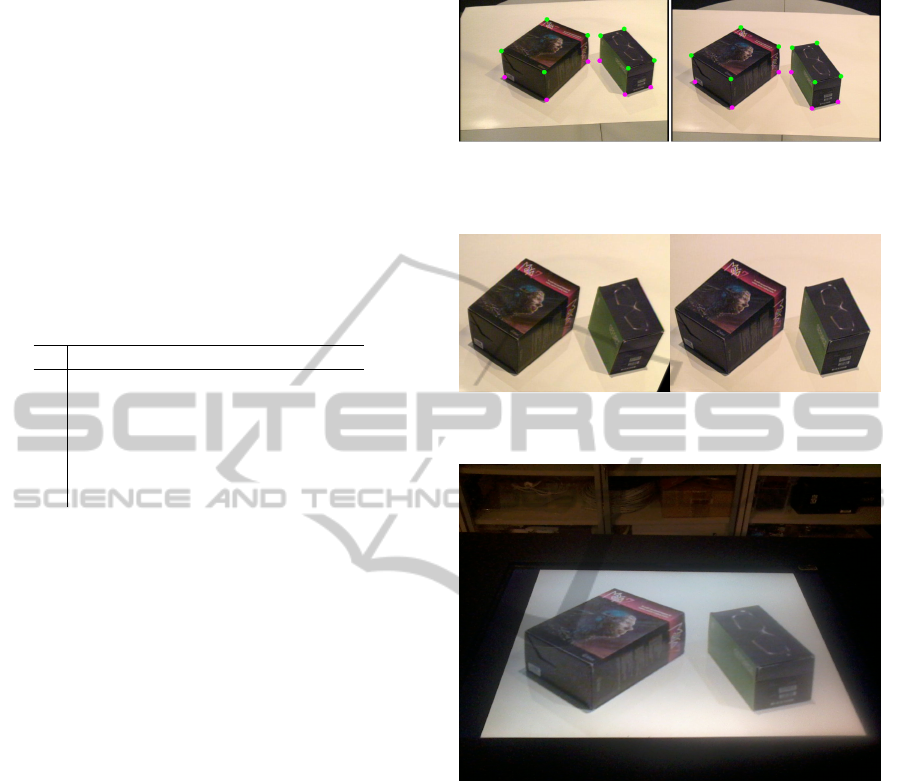
We made some experiments using real images. In Fig-
ure 8 we present a pair of images captured by two
cameras. We use colored dots to identify the homol-
ogous points used for estimating the homographies.
The pink dots correspond to points of Type I and the
green dots are points of Type II.
Figure 9 shows the stereoscopic pair generated by
the application of the homographies estimated using
the methodology described in the previous sections.
And Figure 10 shows the result presented over a hori-
zontal display. It gives the idea of the user perception
Figure 8: Two pictures used for generating an horizontal
stereoscopic pair. There are pink dots over the homologous
points of Type I, and green dots over the points of Type II.
Figure 9: Stereoscopic pair generated using the method de-
scribed in this paper.
Figure 10: One image of a stereoscopic pair being presented
over an horizontal display. This picture gives the idea of the
user perception.
( only one image of the stereoscopic pair is being pre-
sented ).
The scale of the output images was adjusted by the
user using a trial and error method.
12 CONCLUSION AND FUTURE
WORKS
We presented a new method for generating horizon-
tal stereoscopic pairs using images captured by cam-
eras. Our method is not based on the use of calibration
patterns, such as the method presented in (Madeira
and Velho, 2012). It is based on the establishment of
correspondences between homologous points, which
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
540

gives more flexibility to the user.
An important property of our method is that
it finds the best solution considering a metric that
has an intuitive geometric interpretation, the Three-
dimensional Interpretability Error, which is defined in
this paper.
We also proved a theorem that establishes a suffi-
cient condition to the use of our method, and a con-
jecture that support other conditions.
Finally, we believe that this paper and (Madeira
and Velho, 2012) show that it may be possible to build
a new and interesting theory of horizontal stereoscopy
based on the deformation of images, instead of using
a rendering process. This theory would be made of re-
sults from Computer Vision, such as done in (Madeira
and Velho, 2012), or by new results, inspired in Com-
puter Vision, established using Projective Geometry
and Optimization, such as the ones presented in this
paper. Some problems that this new theory could
treats are:
1. Find good methods to initiate the Levenberg-
Marquardt algorithm that minimize the Three-
dimensional Interpretability Error.
2. Prove or disprove the Conjecure 1.
3. Find methods to estimate the 3D error of the scene
presented to the user when the capture process is
not perfect. For example, if the camera centers
are not parallel to the horizontal surface used as
reference.
4. Find the best deformation that the stereoscopic
pair must suffer in order to try to compensate the
movement of the user’s head, although this prob-
lem does not have an exact solution.
5. Define new metrics different from the Three-
dimensional Interpretability Error.
REFERENCES
Aubrey, S. (2003). Process for making stereoscopic images
which are congruent with viewer space. United States
Patent, (6,614,427).
Cutler, L. D., Fr
¨
ohlich, B., and Hanrahan, P. (1997). Two-
handed direct manipulation on the responsive work-
bench. In Proceedings of the 1997 symposium on In-
teractive 3D graphics, I3D ’97, pages 107–114, New
York, NY, USA. ACM.
de la Rivire, J.-B. (2010). 3d multitouch: When tactile ta-
bles meet immersive visualization technologies. SIG-
GRAPH Talk.
Ericsson, F. and Olwal, A. (2011). Interaction and render-
ing techniques for handheld phantograms. In CHI ’11
Extended Abstracts on Human Factors in Computing
Systems, CHI EA ’11, pages 1339–1344, New York,
NY, USA. ACM.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521540518, second edition.
Hoberman, P., Gotsis, M., Sacher, A., Bolas, M., Turpin,
D., and Varma, R. (2012). Using the phantogram
technique for a collaborative stereoscopic multitouch
tabletop game. In Creating, Connecting and Collab-
orating through Computing (C5), 2012 10th Interna-
tional Conference on, pages 23–28.
Leibe, B., Starner, T., Ribarsky, W., Wartell, Z., Krum,
D., Weeks, J., Singletary, B., and Hodges, L. (2000).
Towards spontaneous interaction with the perceptive
workbench, a semi-immersive virtual environment.
IEEE Computer Graphics and Applications, 20:54–
65.
Madeira, B. and Velho, L. (2012). Virtual table – tele-
porter: Image processing and rendering for horizontal
stereoscopic display. In Virtual and Augmented Real-
ity (SVR), 2012 14th Symposium on, pages 1–9.
Marr, D. (1982). Vision: A Computational Investigation
into the Human Representation and Processing of Vi-
sual Information. Henry Holt and Co., Inc., New
York, NY, USA.
Wester, O. C. (2002). Anaglyph and method. United States
Patent, (6,389,236).
Yoshiki Takeoka, Takashi Miyaki, J. R. (2010). Z-touch:
A multi-touch system that detects spatial gesture near
the tabletop. SIGGRAPH Talk.
APPENDIX
There follows the 15 tables generated by the experi-
ments made using synthetic data described in the Sec-
tion 10.
Table 2.
0 1 2 3 4 5 6
2 1.4003 0.7885 0.2338 0.2883 0.2766 0.0000 0.0000
3 0.3507 0.2133 0.1625 0.0000 0.0000 0.0000 0.0000
4 0.4124 0.1775 0.2610 0.2837 0.0000 0.0000 0.0000
5 0.2216 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.1871 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.0759 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 3.
0 1 2 3 4 5 6
2 0.3246 0.3358 0.1134 0.1088 0.1270 0.0000 0.0000
3 0.1132 0.1134 0.0593 0.0000 0.0000 0.0000 0.0000
4 0.0388 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.0464 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.0218 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.0718 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 4.
0 1 2 3 4 5 6
2 0.4397 0.4398 0.2474 0.2468 0.2138 0.0000 0.0000
3 0.2942 0.1217 0.0953 0.0000 0.0000 0.0000 0.0000
4 0.2262 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.2652 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.2412 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.2355 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
HorizontalStereoscopicDisplaybasedonHomologousPoints
541
Table 5.
0 1 2 3 4 5 6
2 0.2615 1.0214 0.3444 0.3502 0.2016 0.0000 0.0000
3 0.1957 0.0951 0.3514 0.3514 0.0000 0.0000 0.0000
4 0.6002 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.1848 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.2007 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.1914 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 6.
0 1 2 3 4 5 6
2 0.6248 0.4991 0.5126 0.5434 0.0463 0.0000 0.0000
3 0.4613 0.4961 0.6431 0.0000 0.0000 0.0000 0.0000
4 0.8455 0.4403 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.4626 0.4934 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.7626 0.4005 0.6388 0.0000 0.0000 0.0000 0.0000
7 0.8050 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 7.
0 1 2 3 4 5 6
2 0.4310 0.4333 0.2562 0.3135 0.1940 0.5502 0.0000
3 0.3730 0.3674 0.6479 0.0000 0.0000 0.0000 0.0000
4 0.1067 0.7464 0.7723 0.0000 0.0000 0.0000 0.0000
5 0.1345 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.1487 0.7467 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.1093 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 8.
0 1 2 3 4 5 6
2 0.7874 0.3198 0.3140 0.3392 0.1825 0.0000 0.0000
3 0.1879 0.1711 0.7936 0.8844 0.7696 0.7654 0.6834
4 0.1550 0.0000 0.7679 0.7452 0.5967 0.6757 0.6654
5 0.5634 0.5935 0.6346 0.6295 0.4998 0.5237 0.6706
6 0.1909 0.6858 0.6874 0.6871 0.4199 0.4277 0.5338
7 0.0024 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 9.
0 1 2 3 4 5 6
2 0.8925 0.4310 0.5367 0.2543 0.2095 0.0000 0.0000
3 0.2532 0.1614 0.1681 0.2341 0.3068 0.0000 0.0000
4 0.1835 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.2148 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.2102 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.1822 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 10.
0 1 2 3 4 5 6
2 0.7426 0.8303 0.3292 0.3646 0.2573 0.0000 0.0000
3 0.4350 0.2784 0.5071 0.4037 0.4607 0.4367 0.4211
4 0.0307 0.0000 0.3957 0.3928 0.0000 0.0000 0.0000
5 0.2708 0.0000 0.0000 0.0000 0.0000 0.3964 0.4045
6 0.0613 0.0000 0.0000 0.0000 0.0000 0.3962 0.4069
7 0.4015 0.4405 0.0000 0.0000 0.0000 0.3949 0.0000
Table 11.
0 1 2 3 4 5 6
2 0.6068 0.3028 0.4622 0.1847 0.1440 0.0000 0.0000
3 0.4653 0.4556 0.4395 0.0000 0.0000 0.0000 0.0000
4 0.6014 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.4418 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.4010 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.4034 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 12.
0 1 2 3 4 5 6
2 0.9409 0.1904 0.3584 0.2534 0.0562 0.4134 0.0000
3 0.3599 0.3445 0.3425 0.0000 0.0000 0.0000 0.0000
4 0.1694 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.2569 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.2307 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.2254 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 13.
0 1 2 3 4 5 6
2 0.6323 0.8084 0.3247 0.4999 0.1544 0.3315 0.0000
3 0.3686 0.3772 0.5905 0.0000 0.0000 0.0000 0.0000
4 0.0112 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.0355 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.0395 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.0333 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 14.
0 1 2 3 4 5 6
2 2.2263 0.3821 0.5053 0.2740 0.2094 0.0000 0.0000
3 0.2677 0.2671 0.2695 0.0000 0.0000 0.0000 0.0000
4 0.6059 0.4744 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.0126 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.0281 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.1253 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 15.
0 1 2 3 4 5 6
2 0.6504 0.4855 0.2401 0.2383 0.0609 0.0000 0.0000
3 0.0698 0.0594 0.0452 0.0000 0.0000 0.0000 0.0000
4 0.0480 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.0375 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.0739 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.0564 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
Table 16.
0 1 2 3 4 5 6
2 1.2309 0.1480 0.1603 0.1065 0.0950 0.2002 0.0000
3 0.2407 0.3813 0.1260 0.2328 0.0000 0.0000 0.0000
4 0.0807 0.2838 0.0000 0.0000 0.0000 0.0000 0.0000
5 0.4762 0.5174 0.0000 0.0000 0.0000 0.0000 0.0000
6 0.0086 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
7 0.0059 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
542
