An eXtended Center-Symmetric Local Binary Pattern
for Background Modeling and Subtraction in Videos
Caroline Silva, Thierry Bouwmans and Carl Fr
´
elicot
Lab. Math
´
ematiques, Images et Applications, Universit
´
e de La Rochelle, 17000 La Rochelle, France
Keywords:
Local Binary Patterns, Background Modeling, Background Subtraction.
Abstract:
In this paper, we propose an eXtended Center-Symmetric Local Binary Pattern (XCS-LBP) descriptor for
background modeling and subtraction in videos. By combining the strengths of the original LBP and the
similar CS ones, it appears to be robust to illumination changes and noise, and produces short histograms,
too. The experiments conducted on both synthetic and real videos (from the Background Models Challenge)
of outdoor urban scenes under various conditions show that the proposed XCS-LBP outperforms its direct
competitors for the background subtraction task.
1 INTRODUCTION
The background subtraction (BS) is one of the main
steps in many computer vision applications, such as
object tracking, behavior understanding and activity
recognition (Pietik
¨
ainen et al., 2011). The BS process
consists basically of: a) background model initializa-
tion, b) background model maintenance and c) fore-
ground detection. Many BS methods have been de-
veloped during the last few years (Bouwmans, 2014;
Sobral and Vacavant, 2014; Shah et al., 2013), and the
main resources can be found at the Background Sub-
traction Web Site
1
.
The BS needs to face several challenging situa-
tions such as illumination changes, dynamic back-
grounds, bad weather, camera jitter, noise and shad-
ows. Several feature extraction methods have been
developed to deal with these situations. Color fea-
tures are the most widely used, but they present sev-
eral limitations when illumination changes, shadows
and camouflage occurrences are present. A variety of
local texture descriptors recently have attracted great
attention for background modeling, especially the Lo-
cal Binary Pattern (LBP) because it is simple and fast
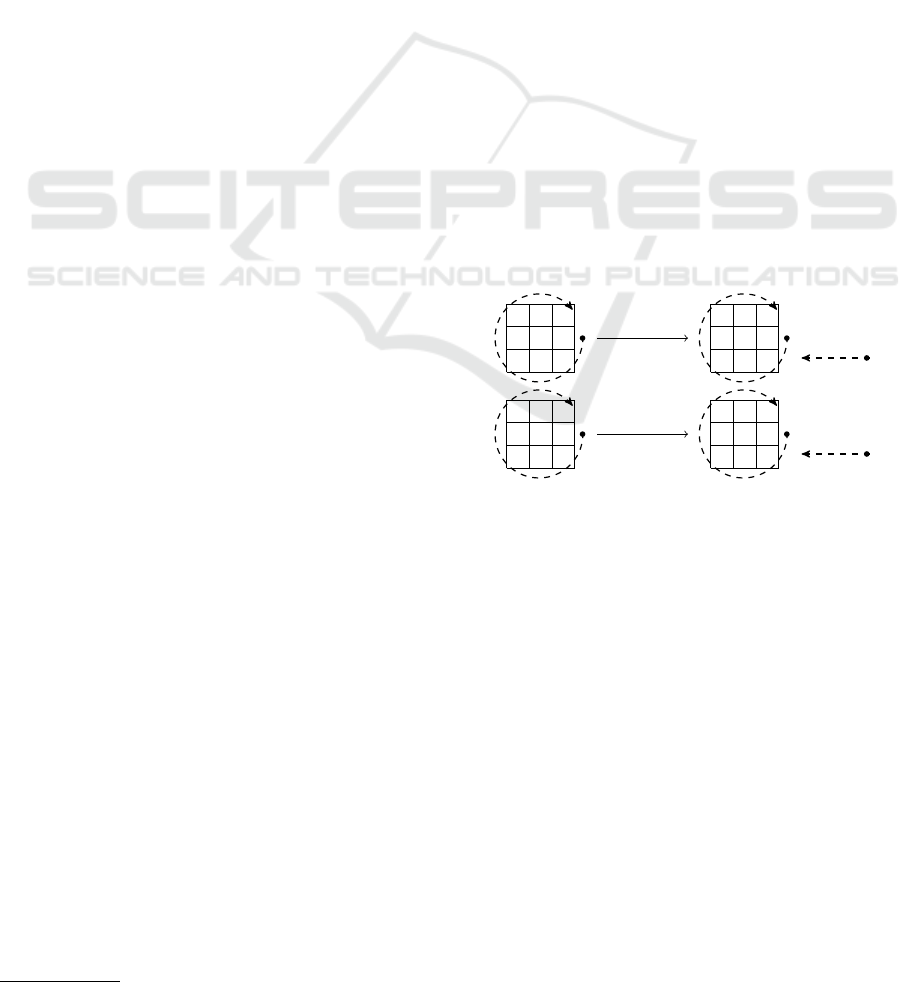
to compute. Figure 1 (top) shows how a (center) pixel
is encoded by a series of bits, accordingly to the rel-
ative gray levels of its circular neighboring pixels.
It shows great invariance to monotonic illumination
changes, do not require many parameters to be set,
and have a high discriminative power. However, the
1
https://sites.google.com/site/backgroundsubtraction/
Home
24
72
68
52
56
51
57 60 58
positive
differences
0
1 1
0 0
1 1 1
code:
11100110
24
72
68
52
59
51
57 60 58
positive
differences
0
1 1
0 0
0
1
0
code:
01000110
Figure 1: Examples of LBP encoding.
original LBP descriptor in (Ojala et al., 2002) is not
efficient for background modeling because of its sen-
sitivity to noise, see Figure 1 (bottom) where a little
change of the central value greatly affects the result-
ing code.
The LBP feature of an image consists in building a
histogram based on the codes of all the pixels within
the image. As it only adopts first-order gradient in-
formation between the center pixel and its neighbors,
see (Xue et al., 2011), the produced histogram can be
rather long. A large number of local texture descrip-
tors based on LBP (Richards and Jia, 2014) have been
proposed so far for background modeling. In order to
be more robust to noise or illumination changes, most
of them are unfortunately either very time-consuming
or produce a long feature histogram.
In this paper, we propose to extend the variant by
Heikkil
¨
a et al. (2009) by introducing a new neighbor-
ing pixels comparison strategy that allows the descrip-
tor to be less sensitive to noisy pixels and to produce
a short histogram, while preserving robustness to il-
395
Silva C., Bouwmans T. and Frélicot C..
An eXtended Center-Symmetric Local Binary Pattern for Background Modeling and Subtraction in Videos.
DOI: 10.5220/0005266303950402
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 395-402
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

lumination changes and slightly gaining in time con-
sumption when compared to its direct competitors.
The rest of this paper is organized as follows. Sec-
tion 2 provides quite an exhaustive overview of LBP-
based descriptors. The new descriptor that we pro-
pose is described in Section 3. Comparative results
obtained on both synthetic and real videos are given
in Section 4. Finally, concluding remarks and some
perspectives are drawn in Section 5.
2 RELATED WORK
One of the first descriptors based on the LBP for
background modeling can be found in (Heikkil
¨
a and
Pietik
¨
ainen, 2006). It improves the original LBP in
image areas where the gray values of the neighboring
pixels are very close to the center pixel one, e.g. sky,
grass, etc.
Shimada and Taniguchi (2009) propose a Spatial-
Temporal Local Binary Pattern (STLBP) which is ro-
bust to short-term illumination changes by using some
temporal information. Two variants of LBP, called
εLBP and Adaptive εLBP, are developed in (Wang
and Pan, 2010; Wang et al., 2010). They are fast to
compute and less sensitive to the illumination varia-
tion or some color similarity between foreground and
background. Heikkil
¨
a et al. (2009) propose the Center
Symmetric Local Binary Pattern (CS-LBP) descrip-
tor which generates more compact binary patterns by
working only with the center-symmetric pairs of pix-
els. In (Xue et al., 2010), a Spatial Extended Center-
Symmetric (SCS-LBP) is presented. It improves the
CS-LBP by better capturing the gradient information
and hence, making it more discriminative. The au-
thors explain that their SCS-LBP produces a relatively
short feature histogram with low computationally
complexity. Liao et al. (2010) propose the Scale In-
variant Local Ternary Pattern (SILTP) which is more
efficient for noisy images. The Center-Symmetric
Local Derivative Pattern descriptor (CS-LDP) is de-
scribed in (Xue et al., 2011). It extracts more detailed
local information while preserving the same feature
lengths than the CS-LBP, but with a slightly lower
precision than the original LBP. Zhou et al. (2011)
develop a Spatial-Color Binary Pattern (SCBP) that
fuse color and texture information. The SCBP out-
performs LBP and SCS-LBP for background subtrac-
tion tasks. In (Lee et al., 2011), the authors propose
an Opponent Color Local Binary Pattern (OCLBP)
that uses color and texture information. The OCLBP
extracts several pixel’s pieces of information, but the
length of the produced histogram makes it useless for
some applications. An Uniform LBP Patterns with a
new thresholding method can be found in (Yuan et al.,
2012). It appears to be tolerant to the interference
of the sampling noise. Yin et al. (2013) propose a
Stereo LBP on Appearance and Motion (SLBP-AM)
which uses information from a set of frames of three
different planes. This texture descriptor is not only
robust to slight noise, but it also adapts quickly to
the large-scale and sudden light changes. A Local
Binary Similarity Patterns (LBSP) descriptor is de-
veloped in (Bilodeau et al., 2013). Based on abso-
lute absolute differences, it applies on small areas and
is calculated inside one image and between two im-
ages. This allows LBSP to capture both texture and
intensity changes. Noh and Jeon (2012) propose to
improve the SILTP (Liao et al., 2010) thanks to a
codebook method. The derived descriptor gain in ro-
bustness when segmenting moving objects from dy-
namic and complex backgrounds. Wu et al. (2014)
extend SILTP by introducing a novel Center Symmet-
ric Scale Invariant Local Ternary Patterns (CS-SILTP)
descriptor which explores spatial and temporal rela-
tionships within the neighborhood. The LBP descrip-
tors present a significant drawback as it ignores the in-
tensity information. Because of this, there could be a
wrong pixel comparison result when intensity values
of pixels differ drastically, but their LBP values are
identical. To overcome this drawback, Vishnyakov
et al. (2014) propose an intensity LBP (iLBP) to build
a fast background model is proposed in (Vishnyakov
et al., 2014). It is defined as a collection of LBP de-
scriptor values and intensity values of the image. The
main characteristics of all the above reviewed LBP
variants, including those we will compare our new de-
scriptor to, are summarized in Table 1.
3 THE XCS-LBP DESCRIPTOR
The original LBP descriptor introduced by Ojala et al.
(2002) has proved to be a powerful local image de-
scriptor. It labels the pixels of an image block by
thresholding the neighbourhood of each pixel with the
center value and considering the result as a binary
number. The LBP encodes local primitives such as
curved edges, spots, flat areas, etc. In the context of
BS, both the current image and the image represent-
ing the background model are encoded such that they
become a texture-based representation of the scene.
Let a pixel at a certain location, considered as the
center pixel c = (x
c
,y
c
) of a local neighborhood com-
posed of P equally spaced pixels on a circle of radius
R. The LBP operator applied to c can be expressed as:
LBP
P,R
(c) =
P−1
∑
i=0
s(g
i
− g
c
) 2
i
(1)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
396
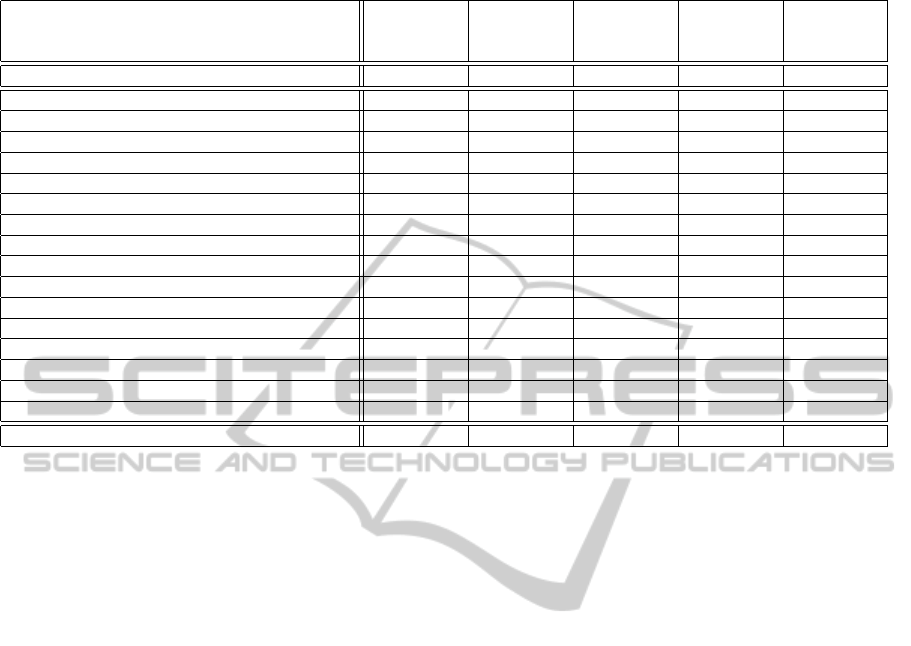
Table 1: Comparison of LBP and variants.
Descriptor
Robust to
noise
Robust to
illumination
changes
Uses
color
information
Uses
temporal
information
Histogram
size with 8
neighbors
Original LBP (Ojala et al., 2002) • 256
Modified LBP (Heikkil
¨
a and Pietik
¨
ainen, 2006) • • 256
CS-LBP (Heikkil
¨
a et al., 2009) • 16
STLBP (Shimada and Taniguchi, 2009) • • 256
εLBP Wang and Pan (2010) • 256
Adaptive εLBP (Wang et al., 2010) • 256
SCS-LBP (Xue et al., 2010) • • 16
SILTP (Liao et al., 2010) • 256
CS-LDP (Xue et al., 2011) • 16
SCBP (Xue et al., 2011) • 64
OCLBP (Lee et al., 2011) • 1536
Uniform LBP (Yuan et al., 2012) • 59
SALBP (Noh and Jeon, 2012) • 128
SLBP-AM (Yin et al., 2013) • • 256
LBSP (Bilodeau et al., 2013) • • 256
iLBP (Vishnyakov et al., 2014) • 256
CS-SILTP (Wu et al., 2014) • • 16
XCS-LBP (in this paper) • • 16
where g
c
is the gray value of the center pixel c and g
i
is the gray value of each neighboring pixel, and s is a
thresholding function defined as:
s(x) =
1 if x ≥ 0
0 otherwise.
(2)
From (1), it is easy to show that the number of binary
terms to be summed is
∑
P−1
i=0
2
i
= 2
P
− 1, so that the
length of the resulting histogram (including the bin-
0 location) is 2
P
. The underlying idea of CS-LBP in
(Heikkil
¨
a et al., 2009) is to compare the gray levels
of pairs of pixels in centered symmetric directions in-
stead of comparing the central pixel to its neighbors.
Assuming an even number P of neighboring pixels,
the CS-LBP operator is given by:
CS − LBP
P,R
(c) =
(P/2)−1
∑
i=0
s(g
i
− g
i+(P/2)
)2
i
(3)
where g
i
and g
i+(P/2)
are the gray values of center-
symmetric pairs of pixels, and s is the thresholding
function defined as:
s(x) =
1 if x > T
0 otherwise
(4)
where T is a user-defined threshold. Since the gray
levels are normalized in [0,1], the authors recommend
to use of a small value. We will set it to 0.01 in the ex-
periments presented in Section 4. By construction, the
length of the histogram resulting from the CS-LBP
descriptor falls down to 1 +
∑
P/2−1
i=0
2
i
= 2
P/2
. For BS,
the CS-LBP encodes the two images to be compared
as texture-based images with a lower quantization that
slightly favors robustness.
We propose to extend the CS-LBP operator
by comparing the gray values of pairs of center-
symmetric pixels so that the produced histogram are
short as well, but considering the central pixel also.
This combination makes the resulting descriptor less
sensitive to noise for the BS application. The new
LBP variant, called XCS-LBP (eXtended CS-LBP),
expresses as:
XCS − LBP
P,R
(c) =
(P/2)−1
∑
i=0
s(g
1
(i,c) + g
2
(i,c))2
i
(5)
where the threshold function s, which is used to deter-
mine the types of local pattern transition, is defined as
a characteristic function:
s(x
1
+ x
2
) =
1 if (x
1
+ x
2
) ≥ 0
0 otherwise.
(6)
and where g
1
(i,c) and g
2
(i,c) are defined by:
g
1
(i,c) = (g
i
− g
i+(P/2)
) + g
c
g
2
(i,c) = (g
i
− g
c
) (g
i+(P/2)
− g
c
)
(7)
with the same notation conventions than in equations
(1) and (3). It is worth noting that the threshold
function does not need a user-defined threshold value,
contrary to CS-LBP.
The computation of the original LBP for a neigh-
borhood of size P = 8 is illustrated in Figure 2 and
the computation of the proposed XCS-LBP is shown
AneXtendedCenter-SymmetricLocalBinaryPatternforBackgroundModelingandSubtractioninVideos
397
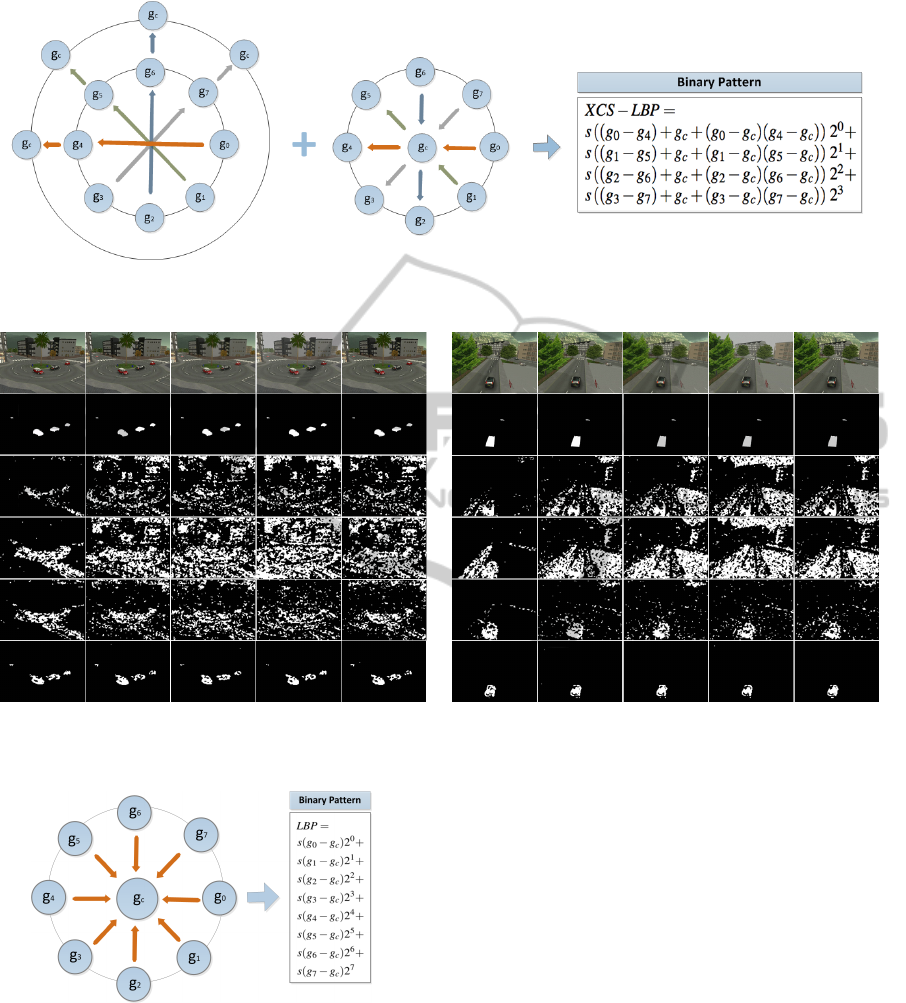
Figure 3: The XCS-LBP descriptor.
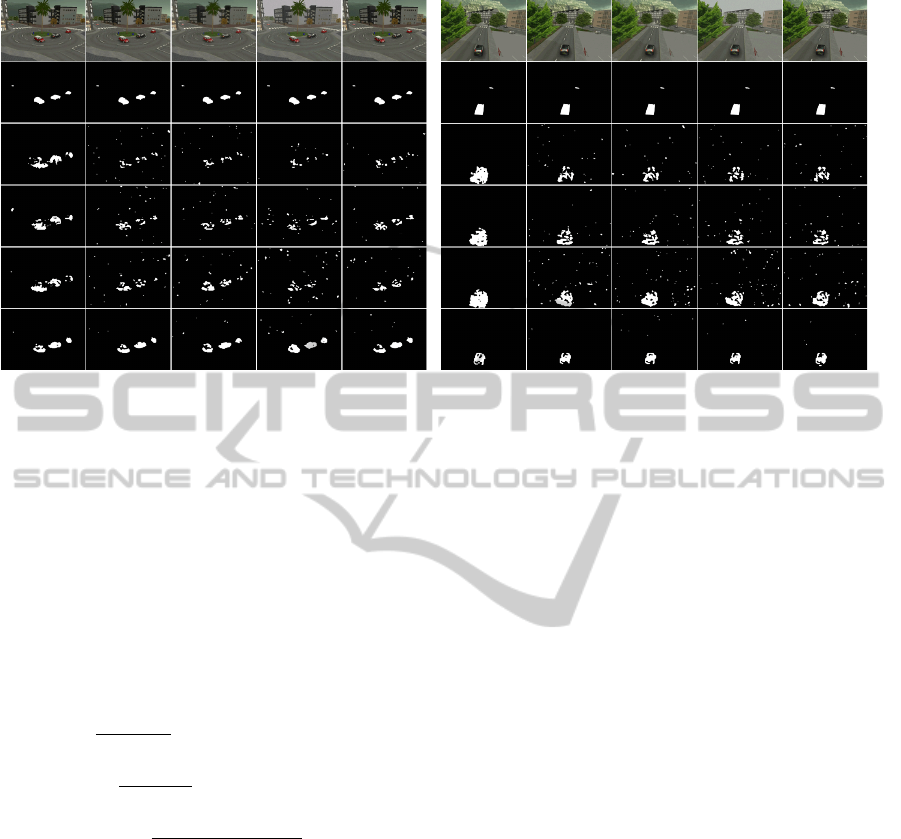
Rotary (frame #1140) – scenes 122, 222, 322, 422 and 522 Street (frame #301) – scenes 112, 212, 312, 412 and 512
(a)
(b)
(c)
(d)
(e)
(f)
Figure 4: Background subtraction results using the ABL method on synthetic scenes – (a) original frame, (b) ground truth, (c)
LBP, (d) CS-LBP, (e) CS-LDP and (f) proposed XCS-LBP.
Figure 2: The LBP descriptor.
in Figure 3 in order to make the comparison more un-
derstandable for the reader. Note the respective code
lengths of 8 and 4 that lead to respective image com-
pressions.
The proposed XCS-LBP produces a shorter his-
togram than LBP, as short as CS-LBP, but it extracts
more image details than CS-LBP because (i) it takes
into account the gray value of the central pixel, and
(ii) it relies on a new strategy for neighboring pix-
els comparison. Since it is also more robust to noisy
images than both LBP and CS-LBP, the proposed
descriptor appears to more efficient for background
modeling and subtraction.
4 EXPERIMENTAL RESULTS
Several experiments were conducted to illustrate both
the qualitative and quantitative performances of the
proposed descriptor XCS-LBP. We use datasets from
the BMC (Background Models Challenge) which
comprises synthetic and real videos of outdoor situ-
ations (urban scenes) acquired with a static camera,
under different weather variations such as: wind, sun
or rain (Vacavant et al., 2012). We compare XCS-
LBP with three other texture descriptors among the
reviewed ones, namely:
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
398
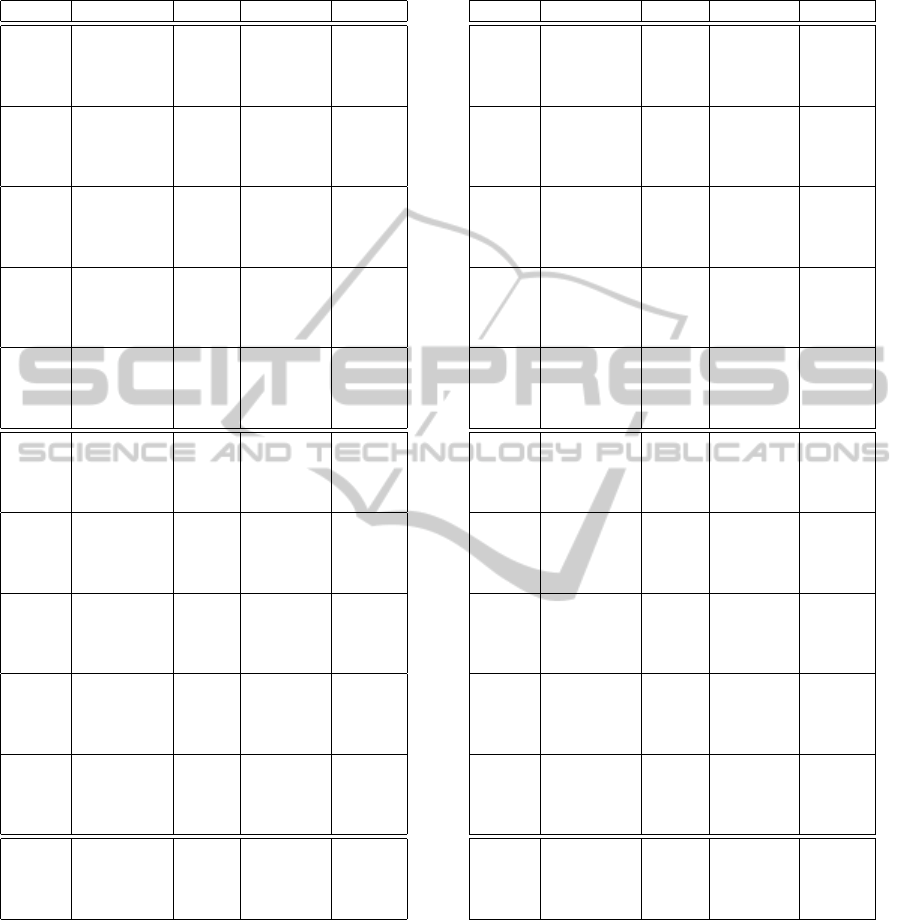
Table 2: Performance of the different descriptors on syn-
thetic videos of the BMC using the ABL method.
Scenes Descriptor Recall Precision F-score
Rotary
122
LBP 0.682 0.564 0.618
CS-LBP 0.832 0.520 0.640
CS-LDP 0.809 0.523 0.635
XCS-LBP 0.850 0.784 0.816
Rotary
222
LBP 0.611 0.505 0.553
CS-LBP 0.673 0.504 0.577
CS-LDP 0.753 0.510 0.608
XCS-LBP 0.852 0.782 0.815
Rotary
322
LBP 0.603 0.505 0.550
CS-LBP 0.647 0.504 0.566
CS-LDP 0.733 0.507 0.600
XCS-LBP 0.829 0.793 0.810
Rotary
422
LBP 0.573 0.502 0.535
CS-LBP 0.609 0.503 0.550
CS-LDP 0.733 0.508 0.600
XCS-LBP 0.751 0.780 0.765
Rotary
522
LBP 0.610 0.505 0.553
CS-LBP 0.663 0.504 0.573
CS-LDP 0.745 0.509 0.605
XCS-LBP 0.852 0.732 0.787
Street
112
LBP 0.702 0.530 0.604
CS-LBP 0.839 0.512 0.636
CS-LDP 0.826 0.525 0.642
XCS-LBP 0.803 0.793 0.798
Street
212
LBP 0.636 0.504 0.562
CS-LBP 0.716 0.503 0.591
CS-LDP 0.798 0.513 0.624
XCS-LBP 0.808 0.790 0.799
Street
312
LBP 0.627 0.504 0.558
CS-LBP 0.699 0.503 0.585
CS-LDP 0.801 0.511 0.624
XCS-LBP 0.800 0.796 0.798
Street
412
LBP 0.580 0.501 0.558
CS-LBP 0.599 0.501 0.546
CS-LDP 0.754 0.507 0.607
XCS-LBP 0.748 0.781 0.764
Street
512
LBP 0.628 0.503 0.559
CS-LBP 0.677 0.503 0.577
CS-LDP 0.771 0.508 0.612
XCS-LBP 0.800 0.575 0.669
Average
scores
LBP 0.625 0.512 0.565
CS-LBP 0.695 0.506 0.584
CS-LDP 0.772 0.512 0.616
XCS-LBP 0.809 0.761 0.782
• original LBP (Ojala et al., 2002),
• CS-LBP (Heikkil
¨
a et al., 2009) and
• CS-LDP(Xue et al., 2011).
We choose these two last descriptors on fair com-
parison purpose. Indeed, among those who rely on the
same construction principle, i.e. Center Symmetric
(CS), they are the only ones that use neither color nor
temporal information, see Table 1. For all descriptors,
the neighborhood size is empirically selected so that
P = 8 and R = 1, and we evaluate the performance
Table 3: Performance of the different descriptors on syn-
thetic videos of the BMC using the GMM method.
Scenes Descriptor Recall Precision F-score
Rotary
122
LBP 0.817 0.701 0.755
CS-LBP 0.830 0.705 0.763
CS-LDP 0.819 0.677 0.741
XCS-LBP 0.831 0.800 0.815
Rotary
222
LBP 0.636 0.653 0.644
CS-LBP 0.741 0.687 0.713
CS-LDP 0.651 0.616 0.633
XCS-LBP 0.825 0.794 0.809
Rotary
322
LBP 0.661 0.646 0.653
CS-LBP 0.741 0.656 0.696
CS-LDP 0.674 0.613 0.642
XCS-LBP 0.821 0.767 0.793
Rotary
422
LBP 0.611 0.585 0.598
CS-LBP 0.673 0.575 0.620
CS-LDP 0.611 0.548 0.578
XCS-LBP 0.748 0.702 0.724
Rotary
522
LBP 0.636 0.627 0.631
CS-LBP 0.743 0.672 0.706
CS-LDP 0.605 0.650 0.627
XCS-LBP 0.825 0.760 0.791
Street
112
LBP 0.940 0.674 0.785
CS-LBP 0.924 0.675 0.780
CS-LDP 0.938 0.656 0.772
XCS-LBP 0.844 0.755 0.808
Street
212
LBP 0.676 0.642 0.659
CS-LBP 0.752 0.658 0.702
CS-LDP 0.694 0.577 0.630
XCS-LBP 0.833 0.760 0.795
Street
312
LBP 0.684 0.633 0.657
CS-LBP 0.742 0.627 0.680
CS-LDP 0.729 0.581 0.647
XCS-LBP 0.821 0.713 0.763
Street
412
LBP 0.619 0.566 0.591
CS-LBP 0.705 0.567 0.628
CS-LDP 0.659 0.539 0.593
XCS-LBP 0.751 0.619 0.679
Street
512
LBP 0.662 0.566 0.610
CS-LBP 0.727 0.568 0.638
CS-LDP 0.689 0.551 0.612
XCS-LBP 0.828 0.629 0.715
Average
scores
LBP 0.694 0.629 0.658
CS-LBP 0.758 0.639 0.693
CS-LDP 0.707 0.601 0.648
XCS-LBP 0.813 0.730 0.769
with two popular background subtraction methods,
see (Bouwmans, 2014):
• Adaptive Background Learning (ABL) and
• Gaussian Mixture Models (GMM).
First, we present results of background subtraction
on individual frames of five different scenes from two
video sequences: Rotary (frame #1140) and Street
(frame #301). Figures 4 and 5 show the foreground
detection results using the ABL and the GMM meth-
ods, respectively. Our descriptor clearly appears to be
less sensitive to the background subtraction method,
AneXtendedCenter-SymmetricLocalBinaryPatternforBackgroundModelingandSubtractioninVideos
399
Rotary (frame #1140) – scenes 122, 222, 322, 422 and 522 Street (frame #301) – scenes 112, 212, 312, 412 and 512
(a)
(b)
(c)
(d)
(e)
(f)
Figure 5: Background subtraction results using the GMM method on synthetic scenes – (a) original frame, (b) ground truth,
(c) LBP, (d) CS-LBP, (e) CS-LDP and (f) proposed XCS-LBP.
whereas the three others are very useless in detecting
the moving objects when using the ABL method, un-
less a strong post-processing procedure.
Next, we give quantitative results on the same
data. We use three classical measures based on the
numbers of true positive T P pixels (correctly detected
foreground pixels), false positive FP pixels (back-
ground pixels detected as foreground ones), false neg-
ative pixels FN (foreground pixels detected as back-
ground ones), and true negative pixels (correctly de-
tected background pixels):
• Recall =
T P
T P + FN
,
• Precision =
T P
T P + FP
, and
• F −score = 2 ×
Recall × Precision
Recall + Precision
.
Tables 2 and 3 shows the scores of the different de-
scriptors obtained on the Rotary and Street entire
scenes when using the ABL and the GMM method,
respectively. Best scores are in bold. The pro-
posed XCS-LBP gives the highest value for each
score on almost all scenes, except for scene Street-
[112, 312,412], for which CS-LBP and CS-LDP has
achieved the best Recall using ABL, and scene Street-
112 for which LBP gives the best Recall using GMM.
Note that both CS-LBP and CS-LDP gives lower
scores (Precision and F-score) than LBP for some
scenes, while our XCS-LBP descriptor takes always
the advantage on the others, as shown by the average
scores reported at the bottom of each Table.
Finally, we evaluate the proposed descriptor on
nine long duration (about one hour) real outdoor
video scenes from BMC. Each video sequence shows
different challenging situations of real world: mov-
ing trees, casted shadows, the presence of a contin-
uous car flow near to the surveillance zone, general
climatic conditions (sunny, rainy and snowy condi-
tions), fast light changes and the presence of big ob-
jects. The scores obtained using the ABL and the
GMM methods are given in Table 4 and 5, respec-
tively. Once again, our descriptor achieved the best
scores on almost always scenes, even when using the
simple ABL method whereas it dramatically compro-
mises the other descriptors. The average scores re-
ported at the bottom of each Table show that our XCS-
LBP outperforms the original LBP and both the simi-
lar construction-based CS-LBP and CS-LDP descrip-
tors, the latter one being less performant than the LBP
using GMM method. We use Matlab R2013a on a
MacBook Pro (OS X 10.9.4) equipped with 2.2 GHz
Intel Core i7 and 8 GB - 1333 MHz DDR3.
We collected the elapsed CPU times needed to
segment the foregrounds using the ABL and the
GMM methods, averaged over the nine real videos
of BMC. Since the reference is the (fastest) LBP de-
scriptor, the times are divided by LBP ones. Table 6
reports the resulting ratios for the compared CS de-
scriptors. Our XCS-LBP shows slightly better time
performance than both CS-LBP and CS-LDP.
5 CONCLUSION
In this paper, a new texture descriptor for background
modeling is proposed. It combines the strengths
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
400
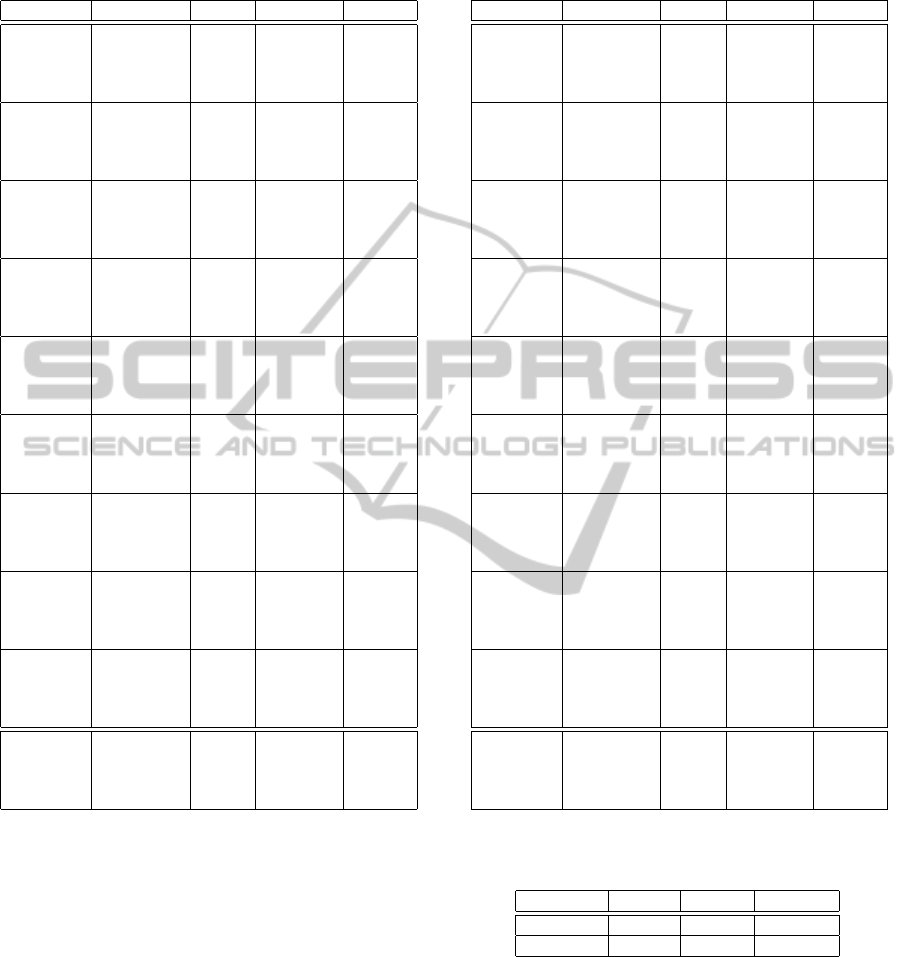
Table 4: Performance of the different descriptors on real-
world videos of the BMC using the ABL method.
Videos Descriptor Recall Precision F-score
Boring
parking,
active
bkbg
LBP 0.555 0.512 0.533
CS-LBP 0.663 0.539 0.595
CS-LDP 0.712 0.556 0.624
XCS-LBP 0.673 0.628 0.650
Big trucks
LBP 0.456 0.490 0.473
CS-LBP 0.664 0.583 0.621
CS-LDP 0.675 0.673 0.674
XCS-LBP 0.623 0.788 0.696
Wandering
students
LBP 0.500 0.500 0.500
CS-LBP 0.632 0.525 0.573
CS-LDP 0.691 0.566 0.622
XCS-LBP 0.854 0.714 0.778
Rabbit in
the night
LBP 0.562 0.515 0.537
CS-LBP 0.657 0.515 0.577
CS-LDP 0.742 0.561 0.639
XCS-LBP 0.818 0.706 0.758
Snowy
christmas
LBP 0.568 0.516 0.541
CS-LBP 0.640 0.508 0.567
CS-LDP 0.684 0.513 0.586
XCS-LBP 0.719 0.557 0.628
Beware of
the trains
LBP 0.542 0.511 0.526
CS-LBP 0.608 0.556 0.581
CS-LDP 0.711 0.618 0.662
XCS-LBP 0.780 0.674 0.723
Train in
the tunnel
LBP 0.524 0.505 0.514
CS-LBP 0.636 0.640 0.638
CS-LDP 0.668 0.659 0.663
XCS-LBP 0.655 0.688 0.672
Traffic
during
windy day
LBP 0.491 0.497 0.494
CS-LBP 0.597 0.528 0.560
CS-LDP 0.589 0.515 0.550
XCS-LBP 0.572 0.529 0.550
One rainy
hour
LBP 0.536 0.508 0.521
CS-LBP 0.563 0.504 0.532
CS-LDP 0.658 0.520 0.581
XCS-LBP 0.694 0.649 0.671
Average
scores
LBP 0.526 0.506 0.515
CS-LBP 0.629 0.544 0.583
CS-LDP 0.681 0.576 0.558
XCS-LBP 0.710 0.659 0.681
of the original Local Binary Pattern (LBP) and the
Center-Symmetric (CS) LBPs. Thus, the new vari-
ant XCS-LBP (eXtended CS-LBP) produces a shorter
histogram than LBP, by its CS-construction. It is also
tolerant to illumination changes as LBP and CS-LBP
are whereas CS-LDP is not, and robust to noise as CS-
LDP is whereas LBP and CS-LBP are not. We com-
pared the XCS-LBP to the original LBP and to its two
direct competitors on both synthetic and real videos
of the Background Modeling Challenge (BMC) using
two popular background subtraction methods. The
experimental results show that the proposed descrip-
tor qualitatively and quantitatively outperforms the
mentioned descriptors, making it a serious candidate
for the background substation task in computer vision
applications.
Table 5: Performance of the different descriptors on real-
world videos of the BMC using the GMM method.
Videos Descriptor Recall Precision F-score
Boring
parking,
active
bkbg
LBP 0.684 0.587 0.632
CS-LBP 0.716 0.593 0.649
CS-LDP 0.674 0.579 0/623
XCS-LBP 0.680 0.607 0.641
Big trucks
LBP 0.695 0.778 0.734
CS-LBP 0.698 0.773 0.733
CS-LDP 0.649 0.758 0.699
XCS-LBP 0.630 0.792 0.702
Wandering
students
LBP 0.704 0.667 0.685
CS-LBP 0.700 0.640 0.668
CS-LDP 0.654 0.634 0.643
XCS-LBP 0.826 0.742 0.782
Rabbit in
the night
LBP 0.767 0.659 0.709
CS-LBP 0.826 0.626 0.712
CS-LDP 0.706 0.619 0.659
XCS-LBP 0.805 0.684 0.740
Snowy
christmas
LBP 0.750 0.519 0.614
CS-LBP 0.734 0.516 0.606
CS-LDP 0.625 0.510 0.562
XCS-LBP 0.726 0.538 0.618
Beware of
the trains
LBP 0.657 0.685 0.671
CS-LBP 0.699 0.664 0.681
CS-LDP 0.641 0.642 0.642
XCS-LBP 0.759 0.731 0.744
Train in
the tunnel
LBP 0.724 0.711 0.717
CS-LBP 0.710 0.675 0.692
CS-LDP 0.679 0.697 0.688
XCS-LBP 0.695 0.680 0.687
Traffic
during
windy day
LBP 0.523 0.509 0.516
CS-LBP 0.553 0.520 0.536
CS-LDP 0.527 0.510 0.518
XCS-LBP 0.532 0.518 0.525
One rainy
hour
LBP 0.867 0.574 0.691
CS-LBP 0.774 0.589 0.669
CS-LDP 0.797 0.556 0.655
XCS-LBP 0.761 0.628 0.688
Average
scores
LBP 0.708 0.632 0.663
CS-LBP 0.712 0.622 0.661
CS-LDP 0.661 0.612 0.632
XCS-LBP 0.713 0.658 0.681
Table 6: Elapsed CPU times (averaged on the nine real-
world videos of the BMC) over LBP times.
Descriptor CS-LBP CS-LDP XCS-LBP
ABL 1.10 1.12 1.09
GMM 1.06 1.07 1.05
Future works will explore how to extend the pro-
posed descriptor to include temporal relationships be-
tween neighboring pixels for dynamic texture classi-
fication or human action recognition.
REFERENCES
Bilodeau, G.-A., Jodoin, J.-P., and Saunier, N. (2013).
Change detection in feature space using local binary
AneXtendedCenter-SymmetricLocalBinaryPatternforBackgroundModelingandSubtractioninVideos
401

similarity patterns. In Int. Conf. on Computer and
Robot Vision, pages 106–112.
Bouwmans, T. (2014). Traditional and recent approaches
in background modeling for foreground detection: An
overview. In Computer Science Review, pages 31–66.
Heikkil
¨
a, M. and Pietik
¨
ainen, M. (2006). A texture-based
method for modeling the background and detecting
moving objects. IEEE Trans. on Pattern Analysis and
Machine Intelligence, 28:657–662.
Heikkil
¨
a, M., Pietik
¨
ainen, M., and Schmid, C. (2009). De-
scription of interest regions with local binary patterns.
Pattern Recognition, 42:425–436.
Lee, Y., Jung, J., and Kweon, I.-S. (2011). Hierarchical on-
line boosting based background subtraction. In Korea-
Japan Joint Workshop on Frontiers of Computer Vi-
sion (FCV), pages 1–5.
Liao, S., Zhao, G., Kellokumpu, V., Pietikainen, M., and Li,
S. (2010). Modeling pixel process with scale invariant
local patterns for background subtraction in complex
scenes. In IEEE Int. Conf. on Computer Vision and
Pattern Recognition, pages 1301–1306.
Noh, S. and Jeon, M. (2012). A new framework for back-
ground subtraction using multiple cues. In Asian Conf.
on Computer Vision, LNCS 7726, pages 493–506.
Springer.
Ojala, T., Pietik
¨
ainen, M., and M
¨
aenp
¨
a
¨
a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans.
on Pattern Analysis and Machine Intelligence, pages
971–987.
Pietik
¨
ainen, M., Hadid, A., Zhao, G., and Ahonen, T.
(2011). Computer vision using local binary pat-
terns, volume 40 of Computational Imaging and Vi-
sion. Springer-Verlag.
Richards, J. and Jia, X. (2014). Local binary patterns: New
variants and applications, volume 506 of Studies in
Computational Intelligence. Springer-Verlag.
Shah, M., Deng, J., and Woodford, B. (2013). Video back-
ground modeling: Recent approaches, issues and our
solutions. In Machine Vision and Applications, pages
1–15.
Shimada, A. and Taniguchi, R.-I. (2009). Hybrid back-
ground model using spatial-temporal lbp. In IEEE Int.
Conf. on Advanced Video and Signal Based Surveil-
lance, pages 19–24.
Sobral, A. and Vacavant, A. (2014). A comprehensive re-
view of background subtraction algorithms evaluated
with synthetic and real videos. Computer Vision and
Image Understanding, 122:4–21.
Vacavant, A., Chateau, T., Wilhelm, A., and Lequievre,
L. (2012). A benchmark dataset for outdoor fore-
ground/background extraction. In Asian Conf. on
Computer Vision, pages 291–300.
Vishnyakov, B., Gorbatsevich, V., Sidyakin, S., Vizilter, Y.,
Malin, I., and Egorov, A. (2014). Fast moving objects
detection using ilbp background model. International
Archives of the Photogrammetry, Remote Sensing and
Spatial Information Sciences, XL-3:347–350.
Wang, L. and Pan, C. (2010). Fast and effective back-
ground subtraction based on εLBP. In IEEE Int. Conf.
on Acoustics, Speech, and Signal Processing, pages
1394–1397.
Wang, L., Wu, H.-Y., and Pan, C. (2010). Adaptive εLBP
for background subtraction. In Kimmel, R., Klette, R.,
and Sugimoto, A., editors, Asian Conf. on Computer
Vision, LNCS 6494, pages 560–571. Springer.
Wu, H., Liu, N., Luo, X., Su, J., and Chen, L. (2014). Real-
time background subtraction-based video surveillance
of people by integrating local texture patterns. Signal,
Image and Video Processing, 8(4):665–676.
Xue, G., Song, L., Sun, J., and Wu, M. (2011). Hy-
brid center-symmetric local pattern for dynamic back-
ground subtraction. In IEEE Int. Conf. on Multimedia
and Expo, pages 1–6.
Xue, G., Sun, J., and Song, L. (2010). Dynamic back-
ground subtraction based on spatial extended center-
symmetric local binary pattern. In IEEE Int. Conf. on
Multimedia and Expo, pages 1050–1054.
Yin, H., Yang, H., Su, H., and Zhang, C. (2013). Dynamic
background subtraction based on appearance and mo-
tion pattern. In IEEE Int. Conf. on Multimedia and
Expo Workshop, pages 1–6.
Yuan, G.-W., Gao, Y., Xu, D., and Jiang, M.-R. (2012). A
new background subtraction method using texture and
color information. In Advanced Intelligent Computing
Theories and Applications, LNAI 6839, pages 541–
548. Springer.
Zhou, W., Liu, Y., Zhang, W., Zhuang, L., and Yu,
N. (2011). Dynamic background subtraction using
spatial-color binary patterns. In Int. Conf. on Graphic
and Image Processing, pages 314–319. IEEE Com-
puter Society.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
402
