
Empirical Models as a Basis for Synthesis of Large Spiking Neural
Networks with Pre-Specified Properties
Mikhail Kiselev
Department of Applied Mathematics, Chuvash State University, Universitetskaya 38/1, Cheboxary, Russia
Keywords: Spiking Neural Network, Empirical Model, Dynamic Threshold, Short Term Synaptic Depression, Decision
Tree, Multiple Adaptive Regression Splines.
Abstract: Analysis of behaviour of large neuronal ensembles using mean-field equations and similar approaches was
an important instrument in theory of spiking neural networks during almost all its history. However, it often
implies dealing with complex systems of integro-differential equations which are very hard not only for
obtaining explicit analytical solution but also for simpler tasks like stability analysis. Building empirical
models on the basis of experimental data gathered in process of simulation of small size networks is
considered in the paper as a practical alternative to these traditional methods. A methodology for creation
and verification of such models using decision trees, multiple adaptive regression splines and other data
mining algorithms is discussed. This idea is illustrated by the two examples – prediction of probability of
avalanche-like excitation growth in the network and analysis of conditions necessary for development of
strong firing frequency oscillations.
1 INTRODUCTION
At present, large spiking neural networks (SNN)
(Gerstner and Kistler, 2002) are considered not only
as plausible models of neuronal ensembles in
various sections of mammalian brain but also as a
technological basis for creation of intelligent robots,
learnable automated control systems, biometric and
multimedia processing devices as well as for many
other breakthrough technologies of near future.
Probably, even in this decade it will be possible to
build computational systems capable of real time
simulating populations of 10
7
– 10
8
(or even 10
9
)
neurons that is close to size of human brain. At least,
the ambitious all-European Human Brain Project
declares it as one of its main targets. Impressive
advances of neuromorphic hardware (Monroe, 2014)
(see, for example, the SpiNNaker project
http://apt.cs.manchester.ac.uk/projects/SpiNNaker/)
also make believe that it is quite realistic. However,
availability of these powerful computers with
massive parallelism is only necessary but not
sufficient condition. It would be unreasonable to
expect that building huge neural network with
certain (even biologically realistic) parameters and
pressing the button “Start” we will observe some
desired or interesting (or even simply non-trivial)
network behaviour. Therefore, the second crucial
and still unsolved problem is synthesis of network
with required characteristics for realization on these
future super-parallel computers. Since these
networks are very big, the exact specification of
their detailed structure is absolutely impossible.
Instead, only general statistics determining
distribution of synaptic weights, delays, interneuron
connection probabilities and other structural
properties of network as a whole will be specified,
while exact detailed network configuration will be
generated randomly accordingly to these distribution
laws. Therefore, the discussed problem can be
formulated as follows. How, knowing parameters of
the neuron model used, the distribution laws of
network structural characteristics and the general
properties of input signal, could we predict
properties of the whole network in terms of neuron
firing frequency, firing correlations, reaction to input
signal variation and other values determining target
behaviour of the network? This problem is very
difficult even for simplest neuron models and
completely homogenous networks.
The most popular approach to its solution is
based on mean-field equations (Baladron et al.,
2012). Undoubtedly, the mean-field approach has
264
Kiselev M..
Empirical Models as a Basis for Synthesis of Large Spiking Neural Networks with Pre-Specified Properties.
DOI: 10.5220/0005134102640269
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2014), pages 264-269
ISBN: 978-989-758-054-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

proven to be a valuable tool for theoretical analysis
of correlated and chaotic network activity, stability
and other large-scale network properties. However,
in my opinion, its application to the above
mentioned problem will be very limited for the
following reasons:
Even for relatively simple neuron models the
mean-field equations may take form of system
of complex integro-differential equations, which
cannot be solved analytically (for example,
when synaptic delays are non-zero and vary
from synapse to synapse). Although their
general solution is not required for some
purposes (e. g. for stability analysis) in most
cases it has to be obtained by numeric methods.
The mean-field approach is based on the
assumptions which are often unrealistic. It is
assumed that number of neurons is infinite. But
consequences of network size finiteness, so
called finite size effects, may be very significant
even for large networks making estimations
obtained by classic mean-field equations
imprecise (Touboul & Ermentrout, 2011). There
are other situations violating basic conditions
for application of this method – for example,
presence of numerous small populations of
neurons with highly correlated activity like in
Izhikevich’s models of neural information
processing and memory based on
polychronization effect (Izhikevich, 2006).
As a rule, creation and analysis of mean-field
equations require substantial research efforts. In
fact, it is a small (or even large) research project
in every case. A minor complication of explored
problem – say, addition of some correlations in
originally Poisson external signal may lead to
dramatic complication of the equations
analyzed. If demand for this kind of study will
be great then much simpler alternative methods
will be required.
The main idea of this paper is that the basic
instrument for creation of networks with specified
required parameters should be empirical models –
formulae expressing dependences of the parameters
describing network activity (the output parameters)
on the variables controlled by network designers –
such as number of excitatory and inhibitory neurons
and synapses, constants in distribution laws for
synaptic weights and delays, individual neuron
parameters etc. (the input parameters). These models
are obtained as a result of automated analysis of
experimental data by data mining algorithms. It is
assumed that the routine semi-automated procedure
for finding these empirical dependences should
include the following steps:
1. Determination of input and output parameters
which could enter the sought models. For the input
parameters it is also necessary to set their possible
variation ranges. The input parameters should not
include extensive variables directly depending on
network size. For example, percent of inhibitory
neurons should be used instead of absolute number
of inhibitory neurons. It is necessary in order to
make the built models scalable.
2. Performing experiments with moderate size
networks and various combinations of the input
parameter values. Number of these experiments
should be sufficient to cover all interesting regions
of the input parameter space and to avoid possible
model overfitting. The good starting point for this
choice is the rule that number of experiments should
be at least 2 orders of magnitude greater than
number of model degrees of freedom. The very
important factor is size of networks used in these
experiments. Since many interesting processes in
SNNs are statistical by their nature it is senseless to
experiment with small networks and expect that the
obtained results will be valid for large SNNs as well.
On the other side, the network should be much
smaller than the target simulated network –
otherwise the whole process would not make sense.
Probably, networks consisting of thousands neurons
would be a good trade-off in many cases. Input
parameter values in these experiments can be set in
accordance with various strategies – random setting,
placement on a grid and so on.
3. Analysis of the tables consisting of input
parameter values and corresponding output
parameter magnitudes measured in the experiments.
It can be done using various data mining algorithms
– this step is considered in next sections.
4. Model scalability verification. Even in case
when the models do not include variables directly
depending on network size, it may be that size of
networks used in these experiments series is
insufficient to reveal important statistical effects or
causes too strong fluctuations distorting the
dependencies sought. In order to test model
scalability a limited number of experiments with
larger networks should be carried out.
This scheme has a number of obvious
advantages. It is semi-automatic and can be
routinely used for a great variety of network
architectures, input signals etc., it produces the
results in the explicit analytical form which can be
used for further analysis (possible by means of
symbolic math software because the found empirical
EmpiricalModelsasaBasisforSynthesisofLargeSpikingNeuralNetworkswithPre-SpecifiedProperties
265

formulae may be huge). Besides, in many cases the
found dependencies can be interpreted by a
researcher and can improve her or his intuitive
understanding of the processes in SNNs.
In the rest of the paper I present an example of
application of this methodology for solution of the
following quite general problem. It is natural that
SNNs performing different functions should behave
differently. However there are at least 3 network
behavior patterns which are useless in any situation:
complete silence – when neurons do not fire at all;
spike avalanche – when firing frequency
demonstrates explosive growth to its maximum
possible level; and strong global oscillations – when
(almost) all neurons fire inside short time intervals
separated by periods of (almost) complete silence.
Our task is to find conditions under which network
has good chances to avoid these negative scenarios
and, therefore, has a chance to demonstrate some
non-trivial reaction to external signal.
2 LIF NEURON WITH DYNAMIC
THRESHOLD AND
SHORT-TERM SYNAPTIC
DEPRESSION
At first, let us consider the neuron model used in this
study. It is a simple generalization of the commonly
used leaky integrate-and-fire (LIF) neuron model. It
has two additional features, whose purpose is to help
keeping firing frequency in necessary limits. These
are dynamic threshold (Benda et al, 2010) and short-
term synaptic depression (Rosenbaum et al., 2012)
(although, I utilize a simpler realization of this
mechanism than models considered there and in
many other works). This model has efficient
computational realization due to its simplicity but
can reproduce many interesting non-linear effects. I
have been used the similar neuron models in several
simulation experiments (Kiselev, 2009, 2011)
however include here only its short formal
description because it is used only for illustration of
the proposed idea.
Neuron state includes two components: dynamic
part of threshold
)0( hh and contributions of
individual synapses to current membrane potential
value
i
v ( niv
i
1,10 , where n is the total
number of synapses). If we denote weight of ith
synapse as w
i
then the actual value of membrane
potential can be written as
ii
vwu . Membrane
potential is rescaled so that its rest value equals to 0
while the firing threshold value after long period of
inactivity is taken equal to 1. Beside
w
i
, neuron
properties are described by the two time constants:
h
and
v
- the time constants of exponential decay
of
h and
i
v , respectively.
Thus, neuron dynamics obeys the rules:
v
ii
h
v
dt
dv
h
dt
dh
, ;
1
i
v when the ith synapse receives spike;
if
hvw
ii
1 the neuron fires and
0,1
i
vhh .
(1)
We see that effect of a presynaptic spike received
by the synapse on membrane potential is less than w
i
if the same synapse received a presynaptic spike
recently. All synapses are non-plastic.
3 NETWORK
We study completely homogenous and chaotic
network consisting of excitatory and inhibitory
neurons. Their amounts always correspond to the
ratio 10:3 – relative strength of excitation and
inhibition in the network is controlled by
modification of numbers of excitatory and inhibitory
synapses and their weights. All excitatory (E) and
inhibitory (I) neurons have the same parameters.
Thus, there are 4 kinds of synapses:
IIEIIEEE ,,,
. Every excitatory
neuron has the same number of EE and IE synapses.
The similar rule is valid for inhibitory neurons. All
synapses of the same type have the same weight.
Synaptic delays are distributed randomly using
lognormal distribution with standard deviation of
logarithm of delay equal to 1. Excitatory
connections are slow (mean delay = 5 msec) while
inhibitory connections are much faster (mean delay
= 1.5 msec) – it is known that inhibitory connections
are really faster in the brain. Set of presynaptic
neurons is absolutely random for every neuron in the
network.
Thus, the network is characterized by the twelve
parameters: the time constants
vIvEhIhE
,,, , the
numbers of synapses n
EE
, n
EI
, n
IE
, n
II
, and the
synaptic weights w
EE
, w
EI
, w
IE
, w
II
.
4 EXTERNAL SIGNAL
We explore the situation when network receives
pure Poisson external signal. Its source is a set of
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
266

network input nodes emitting spikes with certain
constant mean frequency uniform for all input
nodes. All excitatory neurons are connected to
randomly selected subsets of input nodes via
excitatory synapses (we will call them afferent
synapses). We set number of the afferent synapses
equal to 30 in all experiments – we vary the total
external stimulation strength using the mean external
signal frequency.
5 GOAL: AVOIDING NEGATIVE
SCENARIOS
The preliminary experiments show that if all the
parameters are set randomly then with great
probability one of the three things happens: network
does not react on stimulation at all; neurons begin
firing with maximum possible frequency; “zebra-
like” activity when network switches between short
periods of collective hyperactivity and periods of
almost complete silence. The network cannot
perform any useful task in any of these states so that
our aim is to find the conditions when they are
impossible or at least unlikely.
Avoiding the first situation is easy – it is only a
question of sufficient stimulation strength so that let
us consider the 2
nd
one. We will study satisfaction of
the stronger condition, namely, it is required that
network reaction to any stimulation would either
fade away completely after stimulation end or return
to certain not very high baseline firing frequency
level – let it be 30Hz. To test it the experiments are
designed in the following way. The network
received the constant stimulation during some time
interval which was significantly longer than any of
vEhIhE
,, or
vI
. After that the external signal is
switched off and network activity is monitored
during next long interval. If the mean firing
frequency in this period does not exceed 30 Hz (for
any value of stimulation strength) then the network
is declared as “good” or belonging to the class
S
+
.
Otherwise, it belongs to the class
S
-
.
Situation with super-strong oscillations is not so
evident because firing frequency oscillation strength
can be evaluated in many different ways. I chose the
following measure (which will be referred to as
Relative Oscillation Strength – ROS).
1. For every discrete time step t the number of
emitted spikes F(t) is fixed.
2. The autocorrelation function A(t) is calculated
for F(t).
3. Let T be the least value of t for which A(t)
becomes negative. Then the dominating oscillation
period T
OSC
corresponds to maximum of A(t) on
),(
T .
4. Assume that the total experiment time equals
to nT
OSC
, where n is integer. Then, the function
n
i
OSC
iTtFtC
1
)()(
is calculated for 0 < t <
T
OSC
.
5. The interval (0, T
OSC
) is broken to 10 equal
parts; the mean values of C(t) are calculated in each
of these 10 parts. If the minimum of these 10 values
is c
min
, and the maximum is c
max
, then ROS = (c
max
-
c
min
) / c
max
.
Thus, we have the two problems to solve:
to classify a network to S
+
/S
-
or, better, to
evaluate conditional probability P(A|
S
-
) that
for the given vector of input parameters A the
network belongs to
S
-
;
to predict its ROS value.
6 MAIN SERIES OF
EXPERIMENTS
I performed main series of experiments with
networks consisting of 1000 excitatory neurons and
300 inhibitory neurons. The input parameters were
varied in the following ranges: 3 – 100 msec – for all
time constants, 10 – 300 – for number of excitatory
synapses, 3 – 100 - for number of inhibitory
synapses, 0.03 – 0.3 – for weights of excitatory
synapses, 0.1 – 10 - for weights of inhibitory
synapses. Values of stimulation intensity and
afferent synapse weights were selected to satisfy the
requirement that mean firing frequency of isolated
neuron should lay in the range 2 – 300 Hz.
The stimulation duration was 3 sec that is at least
30 times greater than any neuron time constant.
Network activity was also monitored during next 3
sec after stimulation end – in order to place the
network in class
S
+
or S
-
. Also, ROS value was
calculated in every experiment.
The whole series contained 202332 experiments
– it took about 1 day of computation on a powerful
multi-core PC. 27572 different combinations of
network parameters were tested for different
stimulation intensity values.
EmpiricalModelsasaBasisforSynthesisofLargeSpikingNeuralNetworkswithPre-SpecifiedProperties
267
7 CREATION OF EMPIRICAL
MODELS
7.1 S
+
/S
-
Classification
Thus, we have 27572 training cases, 9255 of them
belong to
S
-
. Since the result should obviously
depend on total strength of excitation and inhibition
in the network, the following useful derivative
parameters
ABABAB
wns are produced, where A
and B belong to {E, I}.
Having experimented with different
classification methods I discovered that the best
results are obtained by one of the most popular data
mining algorithms, decision tree. I tested only those
methods which are able to represent their results in
an explicit analytical form – for this reason, such
methods as support vector machines or neural
networks were not considered. The resulting tree-
like classification model has 105 non-terminal nodes
and gives 7.21% classification error. It is important
that decision tree can also estimate P(A|
S
-
).
Examples of its dependence on the strength of
positive feedback in the network for 3 different
combinations of other parameters are depicted on
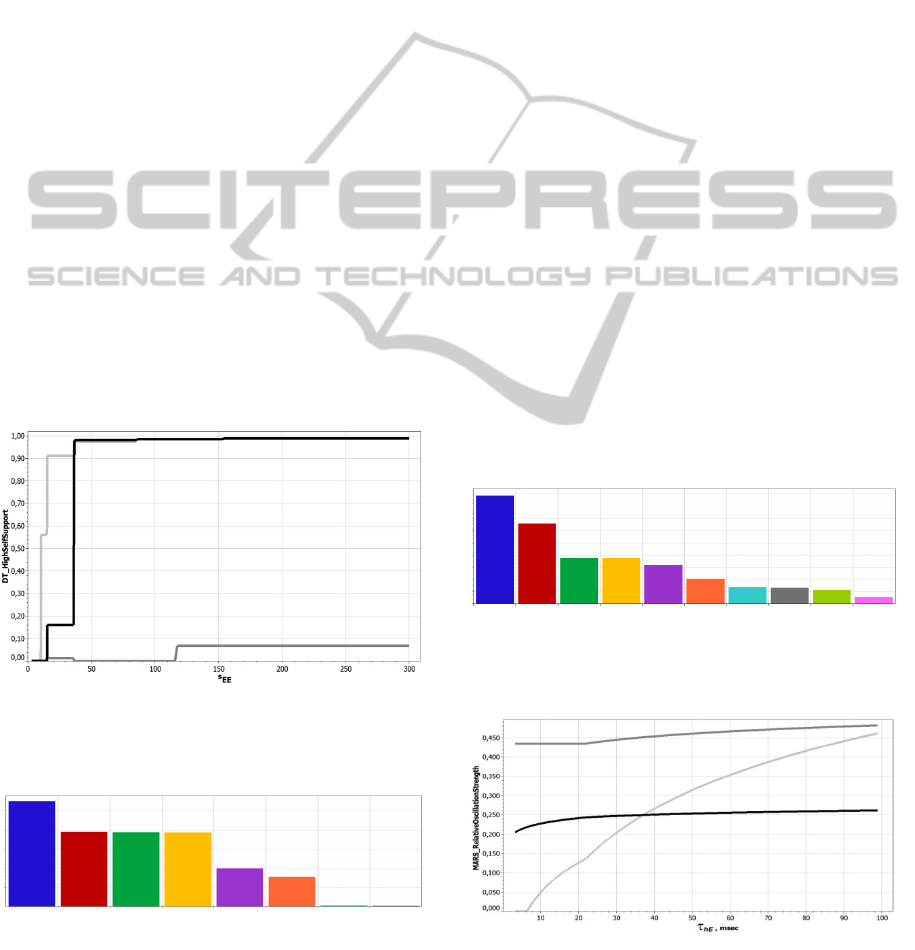
Figure 1. The good model quality is illustrated by
the sharp transition of this probability from 0 to 1.
Figure 1: Examples of dependence of P(A| S
-
) on strength
of positive feedback in the network for 3 different
combinations of its other parameters.
s
EE
hE
s
EI
s
IE
vE
s
II
n
II
n
IE
Figure 2: Relative importance of network parameters for
its classification into S
+
or S
-
.
The model can be represented in symbolic form or
as C code (they can be obtained from me by
request). Moreover, the used implementation of
decision tree algorithm is able to evaluate the
relative influence of different network parameters on
classification result. It is presented in form of
histogram on Figure 2.
7.2 ROS Value Prediction
This time we had to use data mining algorithms
finding numeric interdependencies. In this case the
multiple adaptive regression splines algorithm
(Friedman, 1991) was found to be a champion
among all methods which express obtained model in
a symbolic form. This algorithm represents found
dependence in form of piecewise continuous
polynomials. In our case the built model includes 59
degrees of freedom. Its accuracy estimation
(standard deviation = 0.28, R
2
= 0.45) is not very
impressive. Nevertheless, it happened to be quite
useful. For example, the condition ROS < 0.1
guarantees with high probability that time course of
firing intensity in the network will not take form of
strong oscillations. Similar to decision tree, the
considered algorithm evaluates relative contributions
of independent variables. They are shown on Figure
3. Examples of dependence of ROS on the main
factor,
hE
, for various combinations of other
factors are displayed on Figure 4.
hE
w
IE
n
IE
vE
n
EE
n
II
w
II
n
EI
w
EE
w
EI
Figure 3: Relative contribution of network parameters in
ROS value prediction model variability.
Figure 4: Examples of dependency of ROS value on
hE
for various combinations of other network parameters.
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
268

8 SCALABILITY TEST
Since the created models do not contain explicitly
absolute amounts of excitatory and inhibitory
neurons, it is reasonable to hope that their results
may be valid for much larger networks.
As a practical criterion to classify a network to
S
+
I use the rule that decision tree estimation of P(A|
S
-
) should not exceed 0.3. For small networks (1300
neurons) it gives about 3% of errors. This rule was
tested on 114 10 times greater networks with
combinations of parameters randomly selected in
accordance with the same distribution laws but
retaining only the networks satisfying this criterion.
Surprisingly, none of these networks belonged to
S
-
.
Probably, the greater accuracy of this classification
rule for larger networks can be explained by lower
relative magnitude of statistical fluctuations.
The situation with ROS value prediction is
similar. From my experience I selected critical value
of ROS equal to 0.3. For small networks 15% of
parameter combinations with predicted ROS less
than 0.3 show real value of ROS greater than 0.3.
This error for the greater networks drops to 10.5%.
Although the performed tests may be
insufficient, they can be considered as evidence that
empirical models obtained for smaller size networks
may be at least equally accurate for larger ones and
possibly even more accurate due to weaker impact
of statistical fluctuations.
9 CONCLUSIONS
By the present paper I would like to remind
researchers working in the field of SNN simulation
that empirical models obtained from experiments
with small size networks can be a valuable tool for
design, analysis and monitoring of large (and even
huge) SNNs realized on massively parallel
supercomputers. The term “monitoring” is used here
in relation to the stability problems typical for many
synaptic plasticity models. For example, it is known
that STDP mechanism can easily lead network to an
uncontrolled hyperactivity state because of its
inherent positive feedback. In this case, the
parameters calculated on the basis of empirical
models could signal that network is approaching the
dangerous regions.
This approach is a practical alternative to
complicated theoretical analysis based on mean-field
equations because these equations (also being only
more or less realistic approximation) often take form
of complex integro-differential equations excluding
possibility of their analytical solution. Attractiveness
of the proposed methodology is especially evident in
circumstances when great number of various
network models in combination with changing
external signal properties should be analysed in a
limited time.
The typical strategy of creation of such models is
considered in the paper and illustrated by simple but
practically applicable examples. The reported
empirical dependences were found using
PolyAnalyst™ data mining system developed by
Megaputer Intelligence Ltd.
REFERENCES
Gerstner, W., Kistler, W., 2002. Spiking Neuron Models.
Single Neurons, Populations, Plasticity. Cambridge
University Press.
Monroe, D., 2014. Neuromorphic computing gets ready
for the (really) big time. Communications of the ACM,
57 (6): 13–15. doi:10.1145/2601069.
Baladron, J., Fasoli, D., Faugeras, O., and Touboul, J.,
2012. Mean-field description and propagation of chaos
in networks of Hodgkin-Huxley and FitzHugh-
Nagumo neurons. The Journal of Mathematical
Neuroscience, 2:10 doi:10.1186/2190-8567-2-10.
Touboul, J., Ermentrout, G., 2011 Finite-size and
correlation-induced effects in mean-field dynamics.
Journal of Computational Neuroscience 31 (3): 453-
484. DOI:10.1007/s10827-011-0320-5.
Izhikevich, E. 2006. Polychronization: Computation With
Spikes. Neural Computation, 18: 245-282.
Benda, J., Maler, L., Longtin, A. 2010. Linear versus
nonlinear signal transmission in neuron models with
adaptation currents or dynamic thresholds. Journal of
Neurophysiology. 104: 2806-2820.
Rosenbaum, R., Rubin, J., Doiron, B. 2012. Short Term
Synaptic Depression Imposes a Frequency Dependent
Filter on Synaptic Information Transfer. PLoS Comput
Biol 8(6): e1002557. doi:10.1371/journal.pcbi.
1002557.
Kiselev, M. 2009. Self-organized Spiking Neural Network
Recognizing Phase/Frequency Correlations. In
Proceedings of IJCNN’2009, Atlanta, Georgia, 1633-
1639.
Kiselev, M. 2011. Self-organized Short-Term Memory
Mechanism in Spiking Neural Network. In
Proceedings of ICANNGA 2011 Part I, Ljubljana,
120-129.
Friedman, J. 1991. Multivariate Adaptive Regression
Splines. Annals of Statistics. 19(1): 1-141.
EmpiricalModelsasaBasisforSynthesisofLargeSpikingNeuralNetworkswithPre-SpecifiedProperties
269
