A Parallel Hierarchical Finite State Machine Approach to UAV Control
for Search and Rescue Tasks
Vitor de Araujo, Ana Paula G. S. Almeida, Ciro T. Miranda and Flavio de Barros Vidal
Department of Computer Science, University of Brasilia, Brasilia-DF, Brazil
Keywords:
UAV Control, Paralell Finite State Machine, Hierarchical.
Abstract:
The process of developing a system for an Unnamed Aerial Vehicle (UAV) control is a complex task that we
should be able to implement a set of elaborated algorithms with specific features as fast response for non-linear
inputs, fault tolerance and easy maneuvering procedures. These features define the reachability and quality
of the UAV overall control system. In this position paper, we propose a solution for the UAV control process
using a Parallel Hierarchical Finite State Machine (PHFSM) that results in a high level system including all
features required by an complex UAV control to search and rescue tasks. Following in this approach we can
achieve many improvements than other usual implementations. Initials simulation experiments, using data
from a simple UAV model, indicate in direction that many issues can be solved by this approach.
1 INTRODUCTION
Unnamed Aerial Vehicle (UAV) control is a com-
plex challenge to artificial intelligence and robotic
research areas, due to the singular involved features
(Cavett et al., 2007)(Jeon et al., 2013)(Dayuan et al.,
2013). Nowadays, there are many problems that can
be solved using these vehicles in military and civilian
fields(Ping et al., 2012), consequently the institutions
and the researchers have made great efforts to offer
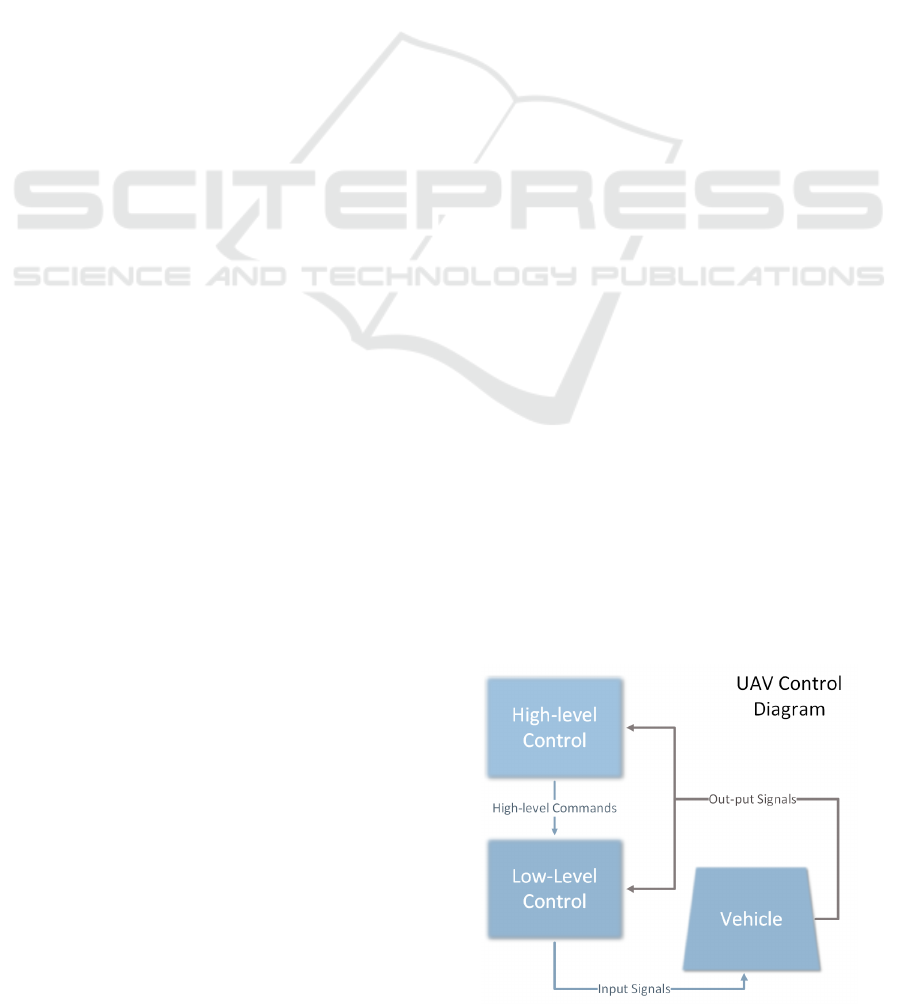
better solutions to fulfill this need. The UAV control
design is divided in two main groups: High-Level and
Low-Level.
The High-Level approach encloses path planning
(Changqing and Zhurong, 2013), mission aims (He
et al., 2010)(Wang et al., 2009), swarm control (Mc-
Cune et al., 2013)(Rabbath, 2013a) and orientation
strategies. These approaches usually need more pro-
cessing time and they have a slow response time to
environment changes and complex design. Being di-
rectly the main influence to the efficiency and perfor-
mance of the control process. In order to evaluate the
requirements of each group, the High-level approach
is mission dependent, because it needs to be coded to
specific properties. For example, the concepts of in-
door and outdoor environments have completely dif-
ferent control strategies.
The Low-Level approach is regulated by the hard-
ware. Its main responsibility is to offer an Applica-
tion Programming Interface (API) to high-level con-
trol layer. They are composed of small blocks of
code and they need to have a fast response time to
the environment changes. The relationship between
these approaches and the control is described in Fig-
ure 1. The Low-level control must be more robust,
compact and involving the vehicle model. These de-
velopments are complex, considering the constraints
of a fast response time to compute uncountable asyn-
chronous and non-linear inputs of the system. This
response can be a simple arithmetic calculation or it
can demand complicated calculations as evaluation of
a stochastic filtering process.
Approaches based on Finite State Machine (FSM)
are commonly applied to digital systems designs and
Figure 1: UAV control diagram.
410
de Araújo V., Paula G. S. Almeida A., T. Miranda C. and de Barros Vidal F..
A Parallel Hierarchical Finite State Machine Approach to UAV Control for Search and Rescue Tasks.
DOI: 10.5220/0005121104100415
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 410-415
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

in many situations(Ercegovac, 2000). The main fea-
tures are: forced modularization defined by the states,
and easy response to the environment changes.
In according to (Sklyarov and Skliarova, 2008),
(FSM, a) and (FSM, b) the FSM paradigm is divided
into three basic models: sequential, hierarchical and
parallel. Although, these are not the only way to solve
UAV control issues. For example, a sequential FSM
is not enough to a hybrid implementations using high-
level and low-level approaches. An interesting de-
velopment is by mixture of parallel and hierarchical
models, as described in (Girault et al., 1999).
This propose is well adequate to solve all UAV
control problems and even has the capability to in-
clude all advantages of the parallel paradigm. Other
features are: the fast time response to asynchronous
inputs, a system layer division and increase system
failure robustness.
Supported by previous arguments, this paper
presents a proposal for UAV control based on a par-
allel hierarchical finite state machine. The Section 2
describes the main related works about UAV control
strategies. In Section 3 and 4 the proposed method-
ology and initial results are presented, respectively.
Conclusions and further work are discussed in Sec-
tion 5.
2 RELATED WORKS
Nowadays, many paradigms are discussed in order to
design an UAV system(Devaud et al., 2012). Each of
these have their advantages and disadvantages, earned
from specific features that perform better results than
others, affected by many conditions, for example the
amount of available budget.
However, these development sometimes depends
of a specific application and environment features that
involves an UAV (Branco et al., 2011). In this case,
it can result in expensive and slow development pro-
cess, causing unfeasibility of some applications, due
to economic restrictions.
Another issue comes from the necessity of using
an expensive hardware with fault tolerance capability,
as multiprocessors, to design the UAV control model
((Trimble, 1987), (Branco et al., 2011)).
In case of UAVs used to swarm control applica-
tions, there is an exponential growth of these issues
due to the dependency of the software low-level layer.
One solution proposed by (Rabbath, 2013b) uses the
finite state machine (FSM) paradigms to improve the
swarm control. If it is possible to determinate that the
paradigm is implemented, then the sequence of the
states has only impact on the mission task. In short
terms, the implementation does not affect the appli-
cation reliability. Although, (Rabbath, 2013b) pro-
posed the use of FSM only for mission control, be-
cause it cannot individually solve these issues under
implementation layer. This approach combines all in-
volved algorithms using a FSM, avoiding the depen-
dency between application and implementation lay-
ers. This strategy results in others advantages to the
system, as volatility, robustness and a natural modu-
larization (Sklyarov and Skliarova, 2008).
A pure sequential FSM approach in all application
levels carries out control problem attributes, turning
the implementation more complex, and occasionally,
impossible.
Many of these problems need a fast time response
to the input in low-level control and high-level pro-
cessing. When these two features are combined, there
is an implication of using too many state transitions,
resulting in an increase of the cpu-time. One way to
make this strategy still in according to these require-
ments is choosing a parallel hierarchical finite state
machine (PHFSM) (Sklyarov and Skliarova, 2008).
This paradigm has many advantages of a simple se-
quential FSM, considering that the main idea is clas-
sify the states and synthesize different FSMs to run in
parallel. This feature results in many advantages to
the overall system, as parallelism, hierarchy and the
capacity of using FSM as a procedure. Summariz-
ing, it is feasible to apply the hierarchical and parallel
paradigm to solve the UAV control problem.
3 PROPOSED METHODOLOGY
This position paper proposes an abstract UAV control
strategy based on a parallel hierarquical finite state
machine. In this case, we develop all control inspired
on use an UAV for search and rescue mission, that
consists in to finding a specific target location and re-
turning to base. For initial approach we have started
building a simple FSM with reduced set of steps as
described in Figure 2.
The high-level diagram of Figure 2 has the first
state (Start), that is defined to takeoff procedures. In
this approach, it is important to denote that all states
have many sublayers to allow right task execution.
After all takeoff procedures are ended, the next state
transitions are related to search and rescue the target.
In this case the control module should be able to lo-
cate the target and control all low-level processes, as
well. These features are needed to keep the UAV in a
safe flight and still search for the target. These states
are described in Figure 2 by Move to Search and Look
for the target respectively.
AParallelHierarchicalFiniteStateMachineApproachtoUAVControlforSearchandRescueTasks
411

Figure 2: A simple FSM for Search and Rescue mission.
After target detection, the next transition is to
Track state that starts the target tracking procedures.
In this stage, the UAV control should be able to run
the tracking algorithm, follow the target and still in a
safe flight. In the end, after reaching all task require-
ments, return to base and landing states respectively.
To reach all these features, we need to change a
simple FSM, described in Figure 2, to a new FSM
based on a parallel and hierarquical approach.
The parallel approach is necessary to allow all
processes to run correctly in the same time, avoiding
process deadlocks. The hierarchical approach has the
function to handle all asynchronous inputs, that can
affect the whole system control performance and al-
lows a safe flight.
3.1 FSM with Hierarquical Stage
To include the Hierarchical Stage (HFSM), all states
were divided in the high-level layer as groups, and
setup a priority level in according to UAV control ex-
ecution, restricted by the task to be performed. In
this implementation, each state has a priority level,
reflected to all low-level sublayers that belong to this
respective state. Using this approach, it becomes able
to handle all asynchronous inputs, since these inputs
have a defined priority level.
In the Figure 3, we modified all FSM design,
where all states are assigned with the same priority
level, because each state is defined in a specific time,
i.e., in this design the UAV control is not allowed to
have two defined states, on the same level. We include
an Emergency State, defined as an asynchronous input
and assigned higher level priority for emergency situ-
ations.
3.2 HFSM with Parallel Stage
The Parallel Stage works directly with all sublayers
Figure 3: FSM to Search and Rescue task with Hierarquical
Stage (HFSM).
interface, using and respecting commands from the
high-level layer, even information from all highest
priorities asynchronous inputs. Each sublayer has a
HFSM controlled by a procedure from the high-level
main UAV control and synchronized by the specific
layer clock time. This clock time can be the same
of the highest level or defined by the sublayer task.
When using this approach, we can find some control
hazards problems: For example, if an asynchronous
input from Emergency State turns on. In this case, af-
ter hazard handling process the system should be able
to return for the last state in all sublayers.
Based on modifications from HFSM (Figure 3),
we include the parallel stage as described in Figure 4
to achieve the PHFSM approach. In order to improve
the proposed control design, we include the vehicle
model information to aid in the navigation process
and all states are grouped in according to specific task.
Each group is described with a specific color. Under
each state has a sublayer with a FSM that is capable
to aid the UAV control auxiliary tasks.
In the end, the proposed UAV control design has
been developed to allow using an UAV for several
tasks, not only to search and rescue tasks.
4 RESULTS
In this section, we will show some partial results
achieved from the proposed methodology described
in Section 3. These partial results are based on a
search and rescue task in which the UAV control steps
are: UAV’s take-off; find and track a person(target);
return to home; and; landing.
The Figure 5 shows the simulation structure used
to evaluate the achieved results so far. The computer
simulation framework is build using resources from
a small UAV system (Parrot AR.Drone) available in
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
412
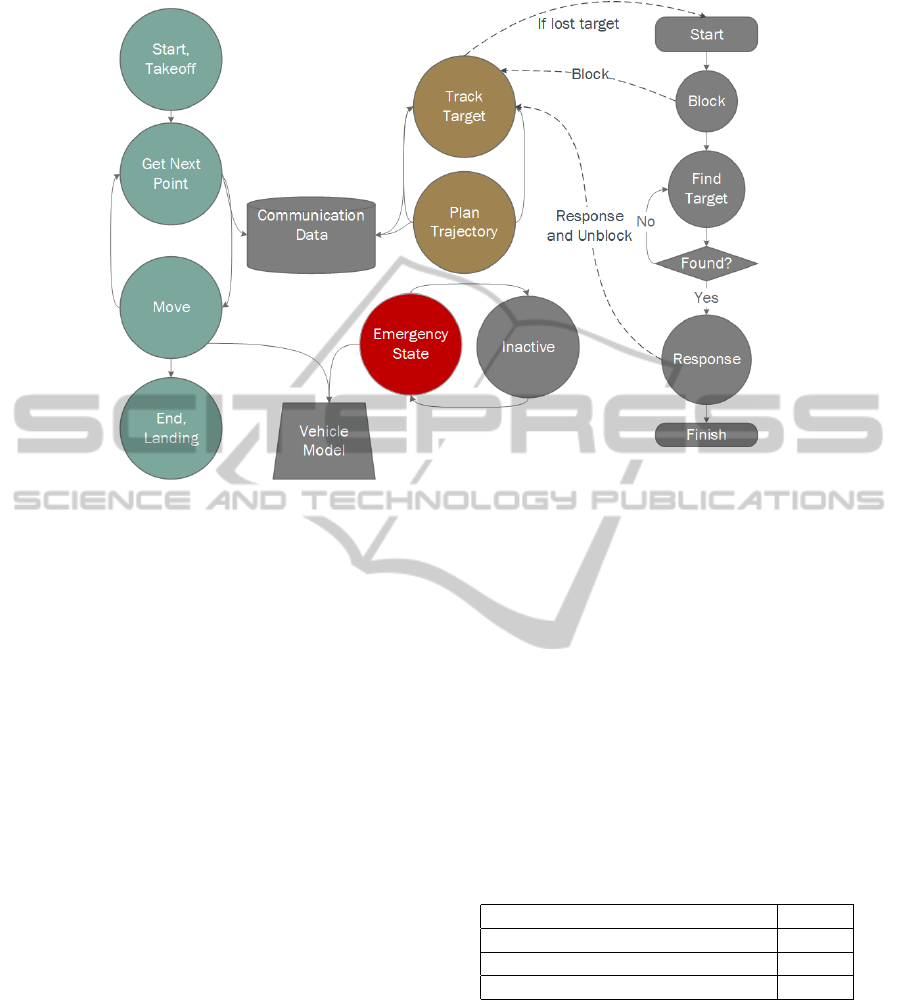
Figure 4: HFSM of Search and Rescue task with Paralell Stage.
ROS library (Quigley et al., 2009) with the TUM
package (Huang and Sturm, 2014).
In this experiment, we define a set of sequential
and parallel processes working together. For exam-
ple, a sublayer is responsible to keep the UAV flying
on safe mode, that runs in parallel with the sublayer
tracking target. A sublayer tracking the target is hi-
erarchically higher than the sublayer of human face
detection.
As a way to evaluate the control system reliability,
the preliminary results will be assigned assessment
strategies: ability to perform the search and rescue
task. Based on this approach we can clearly indicate,
but is not enough, that the proposed methodology is
able to achieve its main objectives.
To assess the ability of the proposed control
methodology in accomplishing the task of search and
rescue, we decided to use the Fault Tree Analysis
(FTA) techinique (Ericson, 1999). In according to
(Ericson, 1999) a Fault tree analysis is defined as a
top down deductive failure analysis in which an un-
desired state of a system is analyzed using Boolean
logic and lower-level events.
This analysis method is used in safety and reli-
ability engineering to define how and when systems
can fail. Therefore, this technique is very important
in the parallel and sequential stages analysis, because
it is able to measure influences of parallel paradigm
when it works together with a sequential FSM. For
example, the Figure 6 describes how the FTA analy-
sis works with a sequential stage in the human face
detection.
For the sequential approach (Figure 6) when the
current state fails, the next state is not reached, caus-
ing the UAV control to return to the previous state.
However, for the parallel approach when the current
state fails, the system follows the execution task flow,
before reaching the overall system failure.
Besides, when using the FTA it is possible to mea-
sure the number of failures on parallel and sequential
stages. In Table 1 are described the number of state
transitions measured in track and human face detec-
tion sublayers respectively. It is clearly observed that
the fault number in parallel approach is reduced, when
compared to the sequential approach.
Table 1: Example of system faults evaluation with FTA.
Sublayer Faults
Sequential Human Face Detection 145
Sequential Tracking 243
Both algorithms in parallel 42
These preliminaries values reinforce that the pro-
posed methodology provides a significant reduction
of the number of state transitions or indirectly a re-
duction of computational cust of the UAV control.
5 CONCLUSIONS
In this position paper we presented new strategies for
UAV control, that uses a parallel hierarquical finite
AParallelHierarchicalFiniteStateMachineApproachtoUAVControlforSearchandRescueTasks
413
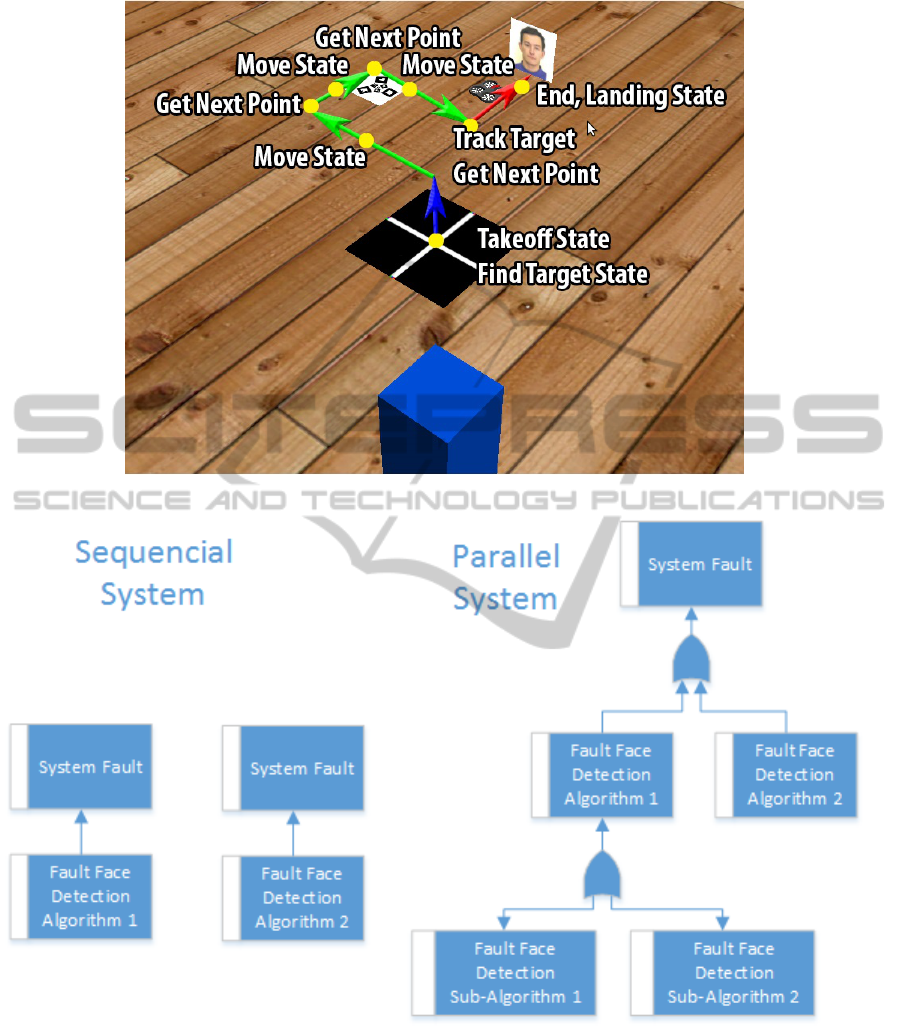
Figure 5: Example of a complete task execution.
Figure 6: FTA for sequential and paralell implementation.
state machine in order to improve search and res-
cue tasks. The partial tests show that the proposed
methodology (PHFSM) achieved better results when
compared to the classical techniques of FSM UAV
control, especially in improve the overall system fail-
ure (by FTA) and evidence of a significant reduction
in the computational cost of the control process.
The proposed approach could provide improve-
ments for UAV control due to the fact that the algo-
rithm also offers flexibility in situations where there is
no previous informations about the task to be tracked,
increasing the system robustness to task failures.
Further works may include the implementation
of the proposed strategies on a high level program-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
414

ming language in order to enable its operation in real
time scenarios (including timing analysis) using a real
UAV and also perform more comparisons with the lat-
est techniques available in UAV control literature.
REFERENCES
G. De Micheli, Synthesis and Optimization of Digital Cir-
cuits, McGraw- Hill, Inc., 1994.
T.Villa, T.Kam, R.K.Brayton, A.Sangiovanni-Vincentelli,
Synthesis of Finite State Machines: Logic Optimiza-
tion, Kluwer Academic Publishers, 1997.
Branco, K., Pelizzoni, J., Oliveira Neris, L., Trindade, O.,
Osorio, F., and Wolf, D. (2011). Tiriba - a new ap-
proach of uav based on model driven development and
multiprocessors. In Robotics and Automation (ICRA),
2011 IEEE International Conference on, pages 1–4.
Cavett, D., Coker, M., Jimenez, R., and Yaacoubi, B.
(2007). Human-computer interface for control of un-
manned aerial vehicles. In Systems and Information
Engineering Design Symposium, 2007. SIEDS 2007.
IEEE, pages 1–6.
Changqing, Y. and Zhurong, W. (2013). Uav path plan-
ning using gso-de algorithm. In TENCON 2013 - 2013
IEEE Region 10 Conference (31194), pages 1–4.
Dayuan, G., Zheng, M., and Hai, Z. (2013). Modeling
and control of unmanned aerial vehicle using self-
organizing map multiple models. In Control and De-
cision Conference (CCDC), 2013 25th Chinese, pages
4177–4182.
Devaud, J., Najko, S., Le Nahedic, P., Maussire, C., Zante,
E., and Marzat, J. (2012). Full design of a low-cost
quadrotor uav by student team. In System Engineering
and Technology (ICSET), 2012 International Confer-
ence on, pages 1–6.
Ercegovac, M. (2000). Introducao aos Sistemas Digitais.
Bookman.
Ericson, C. A. (1999). Fault Tree Analysis A History. In
Proceedings of The 17th International System Safety
Conference.
Girault, A., Lee, B., and Lee, E. A. (1999). Hierarchical
finite state machines with multiple concurrency mod-
els. IEEE Transactions on Computer-aided Design of
Integrated Circuits and Systems, 18:742–760.
He, R., Bachrach, A., Achtelik, M., Geramifard, A., Gur-
dan, D., Prentice, S., Stumpf, J., and Roy, N. (2010).
On the design and use of a micro air vehicle to track
and avoid adversaries. Int. J. Rob. Res., 29(5):529–
546.
Huang, H. and Sturm, J. (2014). Tum package.
Jeon, J., Lee, H., Han, S., Lee, H., Lee, C., Kim, Y. B.,
and Choi, H. R. (2013). Design and control of an
unmanned aerial vehicle (uav) based on the coanda
effect. In Ubiquitous Robots and Ambient Intelli-
gence (URAI), 2013 10th International Conference
on, pages 129–129.
McCune, R., Purta, R., Dobski, M., Jaworski, A., Madey,
G., Madey, A., Wei, Y., and Blake, M. (2013). In-
vestigations of dddas for command and control of uav
swarms with agent-based modeling. In Simulation
Conference (WSC), 2013 Winter, pages 1467–1478.
Ping, J., Ling, A. E., Quan, T. J., and Dat, C. Y. (2012).
Generic unmanned aerial vehicle (uav) for civilian
application-a feasibility assessment and market survey
on civilian application for aerial imaging. In Sustain-
able Utilization and Development in Engineering and
Technology (STUDENT), 2012 IEEE Conference on,
pages 289–294.
Quigley, M., Conley, K., Gerkey, B. P., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). Ros: an
open-source robot operating system. In ICRA Work-
shop on Open Source Software.
Rabbath, C. (2013a). A finite-state machine for collabo-
rative airlift with a formation of unmanned air vehi-
cles. Journal of Intelligent & Robotic Systems, 70(1-
4):233–253.
Rabbath, C. (2013b). A finite-state machine for collabo-
rative airlift with a formation of unmanned air vehi-
cles. Journal of Intelligent & Robotic Systems, 70(1-
4):233–253.
Sklyarov, V. and Skliarova, I. (2008). Design and im-
plementation of parallel hierarchical finite state ma-
chines. In Communications and Electronics, 2008.
ICCE 2008. Second International Conference on,
pages 33–38.
Trimble, G. (1987). A multiprocessor system for auv appli-
cations. In Unmanned Untethered Submersible Tech-
nology, Proceedings of the 1987 5th International
Symposium on, volume 5, pages 208–219.
Wang, Y., Yan, W., and Yan, W. (2009). A leader-follower
formation control strategy for auvs based on line-of-
sight guidance. In Mechatronics and Automation,
2009. ICMA 2009. International Conference on, pages
4863–4867.
AParallelHierarchicalFiniteStateMachineApproachtoUAVControlforSearchandRescueTasks
415
