
Defect Prediction over Software Life Cycle in Automotive Domain
State of the Art and Road Map for Future
Rakesh Rana
1
, Miroslaw Staron
1
, Jörgen Hansson
1
and Martin Nilsson
2
1
Computer Science & Engineering, Chalmers, University of Gothenburg, Gothenburg, Sweden
2
Volvo Car Group, Gothenburg, Sweden
Keywords: Defect Prediction, Software Life Cycle, Automotive Software, Test Resource Allocation, Release
Readiness.
Abstract: Software today provides an important and vital role in providing the functionality and user experience in
automotive domain. With ever increasing size and complexity of software together with high demands on
quality and dependability, managing software development process effectively is an important challenge.
Methods of software defect predictions provide useful information for optimal resource allocation and
release planning; they also help track and model software and system reliability. In this paper we present an
overview of defect prediction methods and their applicability in different software lifecycle phases in the
automotive domain. Based on the overview and current trends we identify that close monitoring of in-
service performance of software based systems will provide useful feedback to software development teams
and allow them to develop more robust and user friendly systems.
1 INTRODUCTION
Software is now an important part of automotive
products, over 2000 software functions running on
up to 70 Electronic Control Units (ECUs) provide a
range of functionality and services in modern cars
(Broy, 2006). With premium segment cars today
carrying about 100 million lines of code, which is
more than fighter jets and airliners (Charette, 2009).
Automotive software development projects at full
EE (Electronics & Electrical System) level usually
are large and span several months. Given the size,
complexity, demands on quality and dependability,
managing such projects efficiently and tracking the
software evolution and quality over the project
lifecycle is important.
Defects in software provide observable
indicators to track the quality of software
project/product under development. Different
methods for analysis of software defect data have
been developed and evaluated, these methods have
also been used to provide a range of benefits such as
allowing early planning and allocation of resouces to
meet the desried goals of projects. The different
methods of software defect analysis and predictions
have different characterstics. They need different
types of input data, are only appropriate to be
applied at specific granularity levels and for certain
applications. In this paper we summarize the state of
the art methods for software defect predicitons. We
place these methods where these are applicable on
the automotive software development life . The
methods are mapped to their appropriate level of
granularity and application type. We also contend
for the position that with technology enabling
collection and analysis of in-operations data
efficently will enable software designers and
developers to use this information to design more
robust and user friendly features and functions.
2 BACKGROUND
2.1 Automotive Software Development
Life Cycle
Most automotive Original Equipment Manufacturers
(OEMs) follow Model Driven Development (MDD).
And since car/platform projects are often large and
spread over several months, they are executed in
number of iterations. Software development in this
domain has been illustrated as variants of iterative
development based on spiral process model (Boehm
377
Rana R., Staron M., Hansson J. and Nilsson M..
Defect Prediction over Software Life Cycle in Automotive Domain - State of the Art and Road Map for Future.
DOI: 10.5220/0005099203770382
In Proceedings of the 9th International Conference on Software Engineering and Applications (ICSOFT-EA-2014), pages 377-382
ISBN: 978-989-758-036-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
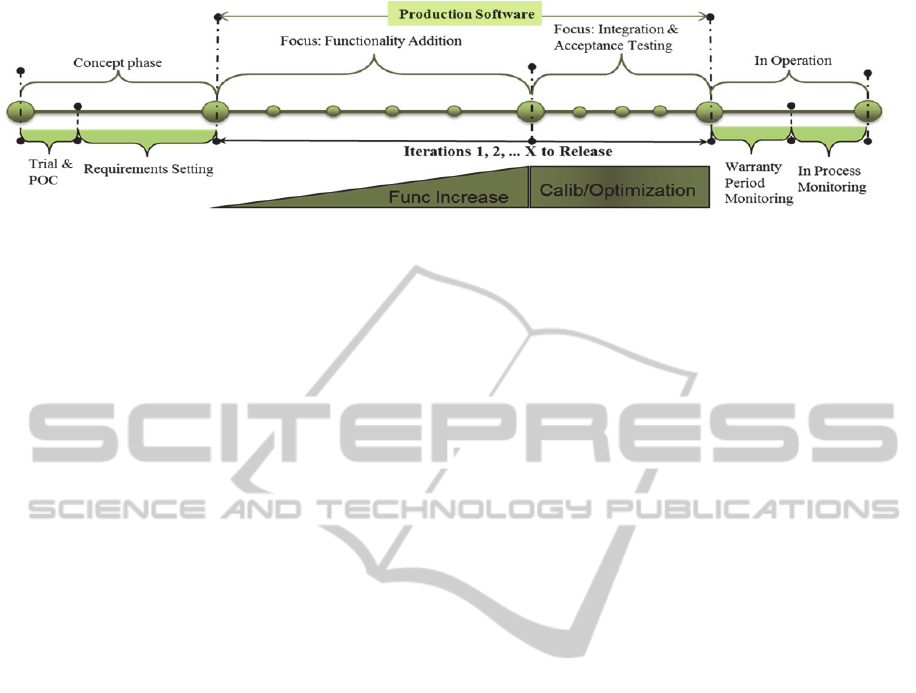
Figure 1: Time Line of Automotive Software Development Life Cycle.
1988) and approaches based on V-model (Dieterle,
2005; ISO 2011).
The full EE (Electronics & Electrical System)
development constitutes the complete development
of software and hardware (Electronic Control Units).
Different stages of software development process in
the automotive domain (illustrated by Figure 1) are:
1. Concept Phase: Where a new functionality is
designed and tested on prototypes and Proof of
Concept (POC) is demonstrated.
2. Production Software: The main requirements (on
vehicle level) are set for the upgrade and new
functions approved for market introduction.
Software and hardware intended to be included
in production automobiles is developed in
iterative manner following V-model or spiral
development process.
The first part of developing production
software is dominated by the addition of the new
functionality. Unit, integration and function
testing are also part of each iteration. In the
second part, also carried out in number of
iterations – the focus is shifted to integration and
acceptance testing.
3. In Operation: Once the new vehicle model is
released into the market, the performance of
software and hardware is monitored (through
diagnostics) during its operation.
2.2 Methods for Software Defect
Predictions (SDP)
Early estimations of software defects can be used
effectively to do better resource planning and
allocations. It can also help to track the progress of
given software project and improve release planning.
A number of methods have been used for
predicting software defects. These methods differ
from one another based on the type of input
required; the amount of data needed, prediction
made and sensitivity to give stable predictions
varies. Based on their characteristics, the models can
be categorized as:
Causal Models,
Using Expert Opinions,
Analogy Based Predictions,
Models based on Code and Change Metrics,
Software Reliability Growth Models
(SRGMs), etc.
2.3 Related Work
Expert opinions were used and their performance
compared to other data based models in a study by
Staron and Meding (Staron and Meding, 2008).
Long term predictive power of SRGMs within the
automotive domain was studied in authors earlier
works (Rana, Staron, Mellegård, et al. 2013; Rana,
Staron, Berger, et al., 2013), demonstrating their
usefulness in making defect and reliability
predictions.
Number of software metrics based on code
characteristics such as size, complexity etc., has
been successfully used to classify defect prone
software modules or estimate software defect
densities. Khoshgoftaar and Allen (Khoshgoftaar
and Allen, 1999) used logistic regression for
classifying modules as fault-prone, while Menzies,
Greenwald and Frank (Menzies, Greenwald, and
Frank 2007) used static code attributes to make
defect prone forecasts. Methods that use code and
change metrics as inputs and use machine learning
methods for classification and forecasting have also
been studied by Iker Gondra (Gondra, 2008) and
(Ceylan, Kutlubay, and Bener 2006).
Fenton and Neil (N. E. Fenton and Neil, 1999)
critique the use of statistical based software defect
prediction models for their lack of causal link
modelling and proposes use of Bayesian Belief
Networks (BBNs). Bayesian Nets have been used to
show their applicability for defect forecasting at very
early stages of software projects (N. Fenton et al.,
2008).
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
378
Our study complements earlier studies in defect
predictions by illustrating when different methods of
SDP are most appropriate over a software
development life cycle.
3 DEFECTS PREDICITON OVER
AUTOMOTIVE SOFTWARE
LIFE CYCLE
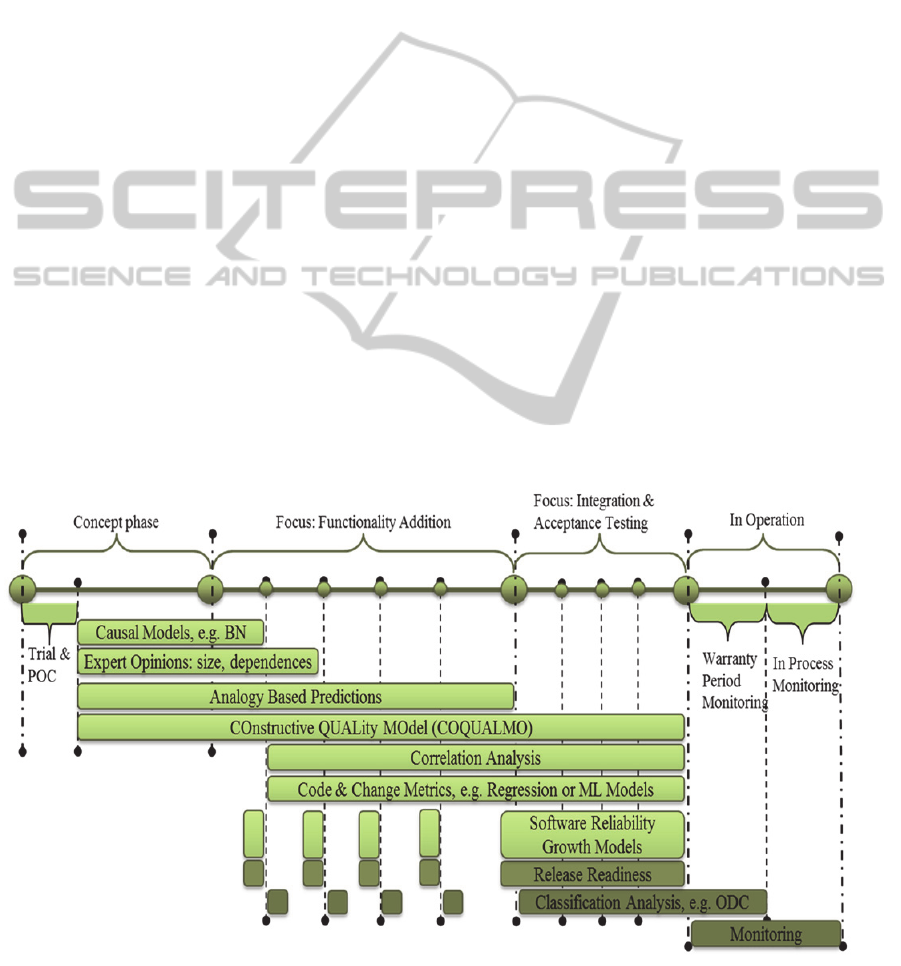
Applicability of various methods for software defect
predictions over the life cycle phases of automotive
software development is represented in Figure 2 and
the characteristics of each method are summarized in
Table 1. At earliest (concept) phase models that can
be applied (given the availability of data about
requirements, designs and implementation) are:
Causal Models
Using Expert Opinions
Analogy Based Predictions
COnstructive QUALity MOdel (COQUALMO)
Models applied at this (concept) phase usually
also use information from similar historical projects.
Experts in the company draw on their experience to
make such forecasts, while data based models
require the data to be supplied as inputs. The larger
the amount of information available on similar
historical projects, the higher is the likelihood for
these models to make accurate and stable
predictions.
Other SDP methods require data from the
development/testing phase. Examples of such
methods are:
Correlation Analysis
Methods based on Code & Change Metrics
Software Reliability Growth Models (SRGM)
Correlation analysis models uses number of
defects discovered in given iteration (and possibly
more attributes) to predict number of defects for
following iterations or defect count at project level.
Methods based on code and change metrics require
access to source code/functional models to measure
characteristics such as size, complexity,
dependencies etc., which are then used to make the
defect proneness classification or forecasting of
defect counts/densities. Thus methods based on code
and change metrics can only be applied when access
to source code/functional models is available. After
end of iteration 1, such data is usually available and
can be used for making such forecasts. In some
cases which is often the situation in automotive
software development, access to source code may be
an issue when software is sourced through a sub-
supplier. Further since the software development in
automotive domain pre-dominantly uses MDD,
functional/behavioural model metrics alternatives to
code metrics may need to be used where their
applicability and performance is currently not well
investigated/documented.
Figure 2: Methods for software defect predictions, applicability over SW life cycle in automotive domain.
DefectPredictionoverSoftwareLifeCycleinAutomotiveDomain-StateoftheArtandRoadMapforFuture
379
SRGMs on the other hand do not need access to
source code/model metrics data; these are black-box
techniques that only use defect inflow data during
development/testing to model the reliability of
software systems. While these models can be
applied when the software is under
development/testing – they need substantial data
points (defect inflow) to make stable predictions.
Analysing defects data over software life cycle
Another characteristic of defect analysis methods is
at what level they can be applied. Based on the type
of method and input data needed different models
provide optimal results at different granularity
levels. They can also be used for variety of different
purposes. Table 2 summarizes the levels and
appropriate applications for each model type. The
granularity level at which analysis can be done are:
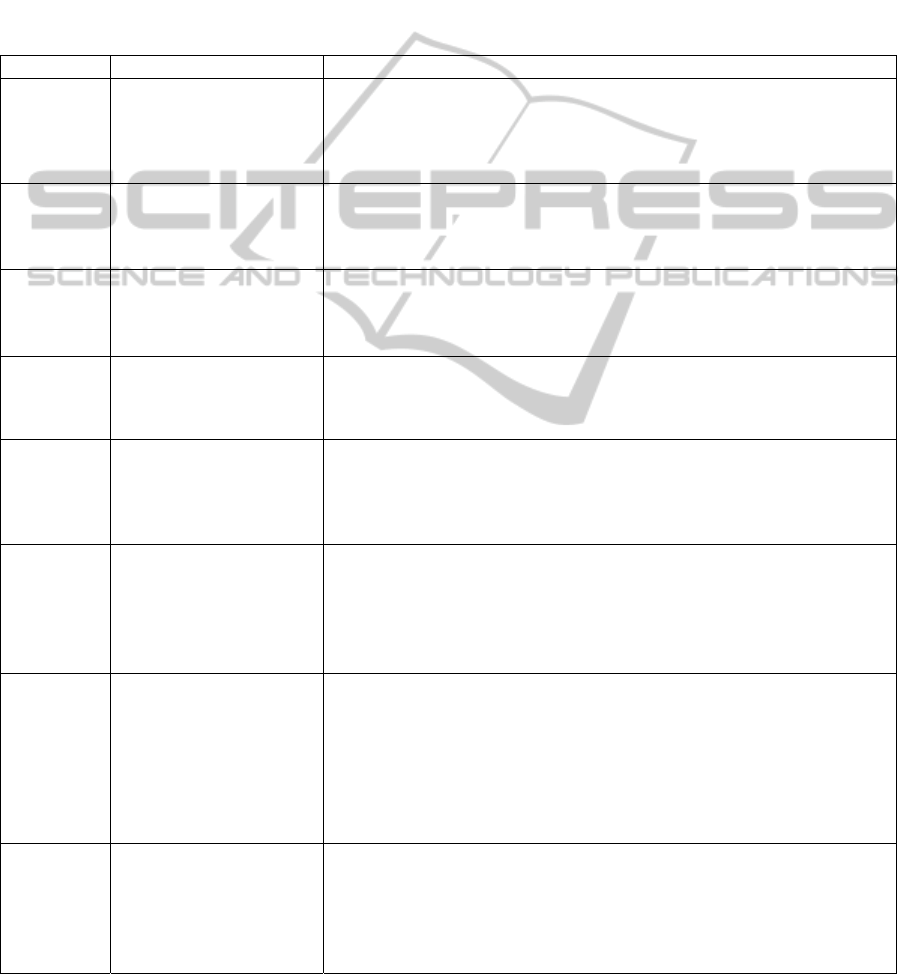
Table 1: Software defect prediction models, characteristics and applicability over Automotive SW life cycle.
Method
Input Data Required
Advantages and Limitations
Causal
Models
Inputs about estimated
size, complexity,
qualitative inputs on
planned testing and
quality requirements.
Causal models biggest advantage is that they can be applied very early in
the development process.
Possible to analyse what-if scenarios to estimate output quality or level of
testing needed to meet desired quality goals.
Expert
Opinions
Domain experience
(software development,
testing and quality
assessment).
This is the quickest and most easy way to get the predictions (if experts are
available).
Uncertainty of predictions is high and forecasts may be subjected to
individual biases.
Analogy
Based
Predictions
Project characteristics and
observations from large
number of historical
projects.
Quick and easy to use, the current project is compared to previous project
with most similar characteristics.
Evolution of software process, development tool chain may lead to
inapplicability or large prediction errors.
COnstructiv
e QUALity
MOdel
Software size estimates,
product, personal and
project attributes; defect
removal level.
Can be used to predict cost, schedule or the residual defect density of the
software under development.
Needs large effort to calibrate the model.
Correlation
Analysis
Number of defects found
in given iteration; size and
test effort estimates can
also be used in extended
models.
This method needs little data input which is available after each iteration.
The method provides easy to use rules that can be quickly applied.
The model can also be used to identify modules that show higher/lower
levels of defect density and thus allow early interventions.
Regression
Models
Software code (or model)
metrics as measure of
different characteristics of
software code/model;
Another input can be the
change metrics.
Uses actual code/models characteristic metrics which means estimates are
made based on data from actual software under development.
Can only be applied when code/models are already implemented and
access to the source code/model is available.
The regression model relationship between input characteristics and output
can be difficult to interpret – do not map causal relationship.
Machine
Learning
based
models
Software code (or model)
metrics as measure of
different characteristics of
software code/model;
Another input can be the
change metrics.
Similar to regression models, these can be used for either classification
(defective/not defective) or to estimate defect count/densities.
Over time as more data is made available, the models improvise on their
predictive accuracy by adjusting their value of parameters (learning by
experience).
While some models as Decision Trees are easy to understand others may
act like a black box (for example Artificial Neural Networks) where their
internal working is not explicit.
Software
Reliability
Growth
Models
Defect inflow data of
software under
development (life cycle
model) or software under
testing.
Can use defect inflow data to make defect predictions or forecast the
reliability of software based system.
Reliability growth models are also useful to assess the maturity/release
readiness of software close to its release
These models need substantial data points to make precise and stable
predictions.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
380
Product Level (PL),
System Level (SL),
Sub-System level (SSL),
Functional Unit level (FU),
MOdule (MO), or at the
File Level (FL)
And the applications where analysis of software
defect data can be useful are:
Resource Planning and Allocations (RPA),
What-IF analysis (WIF),
Release Readiness Assessment (RR),
Root Cause Analysis (RCA), or for
Identification of Defect Prone units (IDP)
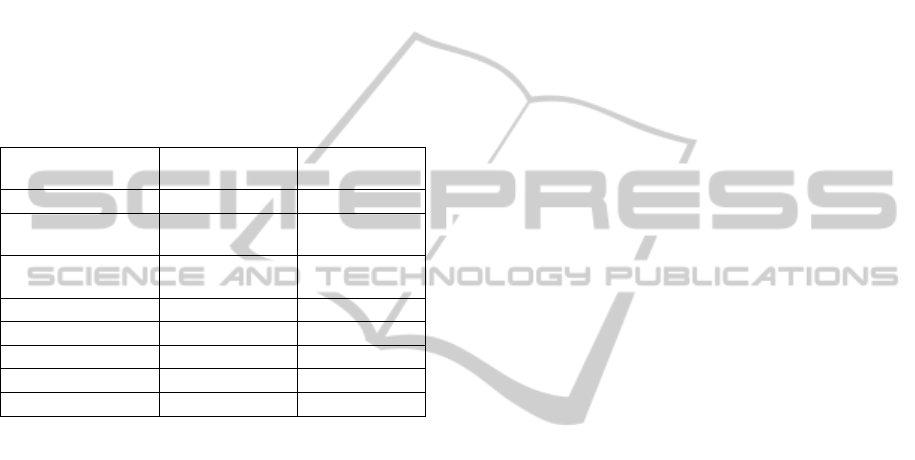
Table 2: Application level and useful purposes.
Model Application level
Application
area
Causal Models PL, SL, SSL RPA, WIF
Expert Opinions PL, SL, SSL, FU
RPA, RRA,
RCA, WIF
Analogy Based
Predictions
PL, SL, SSL, FU RPA, RRA
COQUALMO PL, SL, SSL, FU RPA
Correlation Analysis SSL, FU, MO, FL RRA, IDP, WIF
Regression Models SSL, FU, MO, FL RRA, IDP, WIF
ML based models SSL, FU, MO, FL RRA, IDP, WIF
SRGMs PL, SL RPA, RR, RCA
4 ROADMAP FOR INCREASING
EFFICIENCY IN COMBINING
DEFECT PREDICTION
METHODS WITH FIELD DATA
In the software domain, the post release monitoring
have been fairly limited as software is not regarded
same as hardware (software do not degrade or break
down with age). Another major reason for lack of
monitoring of software in-operation performance in
the past has been the un-availability of necessary
skills at the service end to retrieve the data and
easily feed it back to OEMs for analysis.
But with the advancements of new technology
such as high speed data transfer, cloud storage and
highly automated computer based diagnostics
equipment’s available across most of the service
points - offers unprecedented opportunity to collect
and retrieve the data from the in-operations phase.
This feedback information can further enhance the
capabilities to design and develop even better,
higher quality and safe automotive software.
We contend that the current technologies make it
possible for OEMs to collect and analyse in-
operations performance of software based systems
very much like it has been the case for hardware
components in the past. And much like how such
monitoring helped design better hardware
components, increase their life and reliability –
monitoring the in-operations data of software
systems performance will help design more robust,
reliable and user friendly software functions in the
future.
For example, following and analysing detailed
performance metrics of software based system
during their life-time operations will:
Provide in-operations performance metrics of
software based systems.
The qualitative and quantitative robustness
and reliability measures from in-operations
data will provide input (feedback) for experts
and causal models on which software
characteristics lead to most reliable
performance.
The current evaluation of performance of code
& change metrics SDP models is based on
their performance compared to defects found
during development and testing. Using in-
operations performance data and using code &
change metrics data from their source code
will help identify “best practices” for the
software designers and developers to avoid
actions that may lead to sub-optimal
performance during operations.
Insights from the in-operation phase are
already used by certain OEMs for effective
optimization/calibration. For example
functional units such as powertrain use in-
operations data to calibrate engines for
achieving optimal balance between power and
efficiency.
Active monitoring and analysis of in-
operations performance (of software based
systems) will help isolate any potential
performance related issues and offer quick
updates whenever needed. This will further
enhance the overall dependability of
automotive products.
Further in future where in-operation
monitoring and feedback cycle is shortened
would also enable OEMs to identify user
satisfaction and usefulness of different
features within their cars. This will allow for
design and development of more user friendly
features that will benefits the end customers.
DefectPredictionoverSoftwareLifeCycleinAutomotiveDomain-StateoftheArtandRoadMapforFuture
381

5 CONCLUSIONS
The role and importance of software in automotive
domain is rapidly increasing. The size, complexity
and value software provides in modern automotive
products is ever increasing and expected to grow
further. With trends moving towards more software
enabled functions, autonomous vehicles and active
safety systems – ensuring dependability of software
based systems is highest priority.
Software development in automotive domain is a
long and complex process, various software defect
predictions models offer possibilities to predict
expected defects thus providing early estimations
that are useful for resource planning and allocations,
release planning and enabling close monitoring of
progress of given project.
In the paper we reviewed that different methods
for SDP need different forms of input data, they also
have different capabilities and limitations when it
comes to their ability to make accurate and stable
forecasts. Thus given at what phase of software
development life cycle we are in and what kind of
data is available, certain defect prediction models
may be more appropriate than others and thus should
be preferred.
We also show that unlike past, the present
technology enables close monitoring, collection and
analysis of detailed performance data of software
based system during in-operations phase. This data
now and in future will be much easy to collect, store,
retrieve and analyse. We contend that analysis of
such data will lead to development of more robust
software based systems that will further help to
enhance the reliability of automotive products and
aid in development of features that provide superior
overall user experience.
ACKNOWLEDGEMENTS
The research presented here is done under the
VISEE project which is funded by Vinnova and
Volvo Cars jointly under the FFI programme
(VISEE, Project No: DIARIENR: 2011-04438).
REFERENCES
1044-2009-IEEE Standard Classification for Software
Anomalies. 2010.
Boehm, Barry W. 1988. “A Spiral Model of Software
Development and Enhancement.” Computer 21
(5): 61–72.
Broy, Manfred. 2006. “Challenges in Automotive
Software Engineering.” In Proceedings of the
28th International Conference on Software
Engineering, 33–42.
Ceylan, Evren, F. Onur Kutlubay, and Ayse Basar Bener.
2006. “Software Defect Identification Using
Machine Learning Techniques.” In 32nd
EUROMICRO Conference on Software
Engineering and Advanced Applications,
SEAA’06., 240–47. IEEE.
Charette, Robert N. 2009. “This Car Runs on Code.” IEEE
Spectrum 46 (3): 3.
Dieterle, Werner. 2005. “Mechatronic Systems:
Automotive Applications and Modern Design
Methodologies.” Annual Reviews in Control 29
(2): 273–77.
Fenton, N.E., and M. Neil. 1999. “A Critique of Software
Defect Prediction Models.” IEEE Transactions
on Software Engineering 25 (5): 675–89.
doi:10.1109/32.815326.
Fenton, Norman, Martin Neil, William Marsh, Peter
Hearty, Łukasz Radliński, and Paul Krause.
2008. “On the Effectiveness of Early Life Cycle
Defect Prediction with Bayesian Nets.”
Empirical Software Engineering 13 (5): 499–
537. doi:10.1007/s10664-008-9072-x.
Gondra, Iker. 2008. “Applying Machine Learning to
Software Fault-Proneness Prediction.” Journal
of Systems and Software 81 (2): 186–95.
ISO. 2011. “International Standard-ISO 26262-Road
Vehicles-Functional Safety”. International
Organization for Standardization.
Khoshgoftaar, Taghi M., and Edward B. Allen. 1999.
“Logistic Regression Modeling of Software
Quality.” International Journal of Reliability,
Quality and Safety Engineering 6 (04): 303–17.
Menzies, Tim, Jeremy Greenwald, and Art Frank. 2007.
“Data Mining Static Code Attributes to Learn
Defect Predictors.” IEEE Transactions on
Software Engineering 33 (1): 2–13.
Rana, Rakesh, Miroslaw Staron, Christian Berger, Jörgen
Hansson, Martin Nilsson, and Fredrik Törner.
2013. “Evaluating Long-Term Predictive Power
of Standard Reliability Growth Models on
Automotive Systems.” In Pasadena, CA, USA.
Rana, Rakesh, Miroslaw Staron, Niklas Mellegård,
Christian Berger, Jörgen Hansson, Martin
Nilsson, and Fredrik Törner. 2013. “Evaluation
of Standard Reliability Growth Models in the
Context of Automotive Software Systems.” In
Product-Focused Software Process
Improvement, 324–29. Springer.
Staron, Miroslaw, and Wilhelm Meding. 2008. “Predicting
Weekly Defect Inflow in Large Software
Projects Based on Project Planning and Test
Status.” Information and Software Technology
50 (7): 782–96.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
382
