
Traditional vs Agile Development
A Comparison Using Chaos Theory
Doaa M. Shawky
Engineering Mathematics Department, Faculty of Engineering, Cairo University, Giza 12613, Egypt
Keywords: Agile Development, Waterfall Method, Software Metrics, Chaos Theory.
Abstract: Agile software development describes those methods with iterative and incremental development. This
development method came into view to overcome the drawbacks of traditional development methods.
Although agile development methods have become very popular since the introduction of the Agile
Manifesto in 2001, however, there is an ongoing debate about the strengths and weakness of these methods
in comparison with traditional ones. In this paper, a new dimension for the comparison between the two
methods is presented. We postulate that, since both methods are based mainly on human activity, the two
methods can be modeled using Chaos Theory. Source codes that are produced by the two methods in
subsequent versions are characterized by a set of software metrics. Modeling and analysis of these metrics
are performed using the Chaos Theory. Initial results show that the metrics sequences of both methods are
chaotic sequences. Furthermore, agile methods produce more chaotic metrics sequences. However, is being
chaotic a good or a bad feature? We argue that sometimes being chaotic is not a weakness, on the contrary,
it is a strength.
1 INTRODUCTION
Since the invention of the traditional waterfall
method by Royce in 1970 (Sommerville, 1996), it
has been used as a de facto standard for software
development processes. It is often described as the
stereotypical traditional method. Using this method,
the software development lifecycle is divided into
seven sequential stages: Conception, Initiation,
Analysis, Design, Construction, Testing, and
Maintenance. Traditional waterfall software
development approaches are usually considered
incapable of handling the development complexity
(Highsmith, 2013). Since the software industry,
software technology, and customers’ expectations
were moving very quickly and the customers were
becoming increasingly less able to fully state their
needs up front. As a result, agile methodologies and
practices emerged as an explicit attempt to more
formally embrace higher rates of requirements
change. Thus, in the past few years, agile software
development has emerged as a promising
methodology to complexity. Various agile
approaches have been proposed. Among the
methods which have gained a lot of popularity, the
eXtreme Programming (XP) (Beck and Andres,
2004) and Scrum (Schwaber and Beedle, 2002).
There is an ongoing debate about agile and
traditional methods and usually they are considered
opposition to each other. The waterfall model is
especially used for large and complex engineering
projects. However, it has some drawbacks, like
inflexibility in the face of changing requirements
(Sommerville and Kotonya, 1998), where the
requirements design absorbs a large amount of
project resources. In addition, well documentation is
necessary in all phases of the project life cycle. On
the other hand, agile methods deal well with
unstable and volatile requirements by employing
short iterations, early testing, and customer
collaboration (Martin, 2003). These characteristics
enable agile methods to deliver business value early
and improve it continuously throughout the life of
the project (Larman, 2003). In (Huo et al., 2004), the
authors conducted a study to compare between agile
and waterfall methods using software quality
assurance (QA) practices. They mentioned that in
agile methods, static and dynamic quality assurance
practices are combined in the short iterative phases
of the life cycle. Meanwhile in waterfall methods,
only static QA practices are possible in the analysis
109
Shawky D..
Traditional vs Agile Development - A Comparison Using Chaos Theory.
DOI: 10.5220/0005096501090114
In Proceedings of the 9th International Conference on Software Paradigm Trends (ICSOFT-PT-2014), pages 109-114
ISBN: 978-989-758-037-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

phase. On the other hand, dynamic QA are used in
the Test phase, and they are combined in the Design
and Implementation phases. However, they
concluded that it is very difficult to compare the
software quality resulting from the two approaches
as they have different initial development
conditions.
Chaos refers to systems which are at an
intermediate point between the completely
predictable and the totally random ones. Examples
of chaotic systems in nature include tornadoes, stock
markets, turbulences, and weather (Casdagli, 1989).
Chaos theory is the one that deals with such systems.
At the heart of chaos theory is the notion that
complex systems can often be characterized by fairly
simple mathematical equations (Mandel, 1995).
The Chaos model and Chaos life cycle can be
used to define a concise framework for exploring,
interpreting, and assessing software development. In
this context, only few studies were found. For
instance, Wang et al. (Wang and Vidgen, 2007) have
analyzed the roles of structuring and planning in the
software development process using edge of chaos
concept from complex adaptive systems theory.
They have performed empirical studies of two
software development teams in the same IT
company where one of them is developed using an
agile methodology, XP, and the other using the
waterfall approach. Both software development
processes are analyzed using the “edge of chaos”
from the complex adaptive system theory. The
authors found that structuring and planning are
essential to agile processes and take different forms
from the waterfall model. In addition, they
concluded that the prescribed structures of the
waterfall method makes it chaotic. Also in (Wang
and Vidgen, 2007), the authors have proposed a
framework for the study of agile approaches using
complex adaptive system theory (CAS). Several
agile practices have been identified and linked to the
relevant CAS principles. The CAS framework was
applied to a case study that used XP. A strong
correspondence between CAS theory and the
practice of agile approaches was found. Moreover,
Raccoon (Raccoon, 1995) has used the principles of
chaos to study the relationships between a line of
code and the entire project. The author described the
development process from a developer’s point of
view. He used the Chaos model that combines a
linear problem solving loop with fractals to describe
the complexity of software development. Using
chaos theory, a linear problem-solving loop is
combined with fractals to suggest that a project
consists of many interrelated levels of problem
solving. In addition, the chaos model shows how
users, developers, and technologies interact during a
project. Although these works have provided a
framework that maps some agile principles to Chaos
theory, none of these works show how to apply the
power of Chaos theory in analysing the final product
of this chaotic process which is the source code
itself.
A software metric is a measure that generates a
numerical value for a piece or a specification of the
software (Cem Kaner, 2013). Some common metrics
include source lines of code (SLOC), cyclomatic
complexity, Function Point Analysis (FPA), etc.
Previously, we have used software metrics in re-
engineering and maintenance activities (Shawky,
2008a, Shawky, 2008b), clone detection (Shawky
and Ali, 2010b, Shawky and Ali, 2010c) and in
defining a measure for software agility (Shawky and
Ali, 2010a). In this paper, the final product of a
software development process which is the source
code, is characterized by a set of software metrics.
The subsequent versions of analyzed systems are
characterized by a set of software metrics. These
sequences of values are then analyzed and modelled
by the Chaos Theory. This analysis allows for
prediction or forecasting of the system’s behaviour
in the near future (Tsoukas, 1998).
In the first step of the proposed approach, we
statically scan implementation files using the static
analysis and metrics generation tool Understand
(www.scitools.com). Although we used only the two
metrics SLOC and Cyclomatic Complexity which
both can be used to represent the complexity
characteristics of the analyzed system, however, the
analysis can be extended to include other metrics. In
the second step, we analyzed the two sequences that
were generated for the two metrics in the subsequent
versions of the studied systems. Chaos theory is used
in modelling and analysing these sequences.
Obtained results show that both sequences are
chaotic and that the sequence of metrics values for
the system that was developed using agile methods
is more “chaotic” than the other sequence.
The rest of this paper is organized as follows.
Section 2 presents a background on Chaos Theory.
In Section 3, the proposed approach is presented in
detail. Section 4 summarizes the results. Finally
Section 5 introduces conclusions and future work.
2 CHAOS THEORY
Chaos is a property of some deterministic systems.
A deterministic system is one in which future states
depend on the current conditions. They can be
ICSOFT-PT2014-9thInternationalConferenceonSoftwareParadigmTrends
110

modelled by dynamical systems. Historically the
idea has been that all processes occurring in the
universe are deterministic, and that if we knew
enough of the rules governing the behaviour of the
universe and had measurements about its current
state we could predict what would happen in the
future.
Chaotic systems must have some characteristics
(Mandel, 1995, Wang et al., 2008). These include
the following. Most complex systems exhibit what is
called attractors which are the states or patterns the
system eventually settles into. Some systems tend
toward traditional fixed points or limit cycles. On
the other hand, chaotic systems have strange
attractors which are unrepeated patterns. Also, long-
term prediction is mostly impossible due to
sensitivity to initial conditions. The lack of long-
term predictability in chaotic systems does not imply
that short-term prediction is impossible. In
counterpoint to purely random systems, chaotic
systems can be predicted for a short interval into the
future.
The first step in the analysis of a chaotic time
series data was introduced in (Packard et al., 1980)
in which state-space reconstruction of time series
data was proposed for the first time. The
mathematical justification of this approach was
presented in (Takens, 1981) where the reconstructed
state space is proved to be one-to-one equivalent to
the original state space of the real-life system. The
reconstruction of state space can be summarized as
follows: Given s (t); a scalar function describing the
system, sampled at time interval τ
s
, and starting at
some time t0, the nth sample can be represented as:
s
n
= s (t
0
+ (n − 1) τ
s
), n = 1, 2, . . . (1)
A delay-coordinate reconstruction can be formed
by plotting the time series versus one or more time-
delayed version(s) of it. For a 2-dimensional
reconstruction, we plot the delay vector y(n) = [s
n
,
s
n
−L ], n =L +1, L +2, . . ., where L is the lag or
sampling delay, i.e., the difference between the
adjacent components of the delay vector in number
of samples. For a d-dimensional reconstruction, the
delay vector, y(n) can be written as given by (2):
y(n) = [s
n
, s
n−L
, · · · , s
n−(d−2)L
, s
n−(d−1)L
] (2)
It was proved by Taken’s theory (Takens, 1981)
that if d is large enough, the vector series y(n)
reproduces many of the important dynamical
characteristics of the original series. Thus, one does
not need the original vector series in order to analyze
many of the system properties of the data series.
Specifically, if the dimension of the reconstructed
space, d, is larger than twice m which is the number
of active degrees of freedom, the equivalence of the
spaces is guaranteed. From a mathematical point of
view, the selection of L has no effect on the
embedding of a noise-free time series. However, in
practical applications and for data contaminated with
noise, a good choice of L has an important impact on
the analysis (Casdagli et al., 1991). If L is too small
in comparison with the dynamic variation of the
system, successive elements of the delay vectors are
strongly correlated. If L is too large, successive
elements are almost independent. In delay-
coordinate reconstruction, the selection of time delay
and dimension are the most important issues (Fraser
and Swinney, 1986). For the calculation of time lag,
different approaches are proposed in the literature
(Fraser and Swinney, 1986, Shinbrot et al.,
1993).Among them, the autocorrelation function and
mutual information approach are the most general
and common. In our approach, we will use the
mutual information method which can account for
any nonlinear dynamical correlation in contrast to
the use of the autocorrelation function (Shinbrot et
al., 1993).
The mutual information for sampling delay L
can be defined as:
I (L) =
∑
Ps
,s
log
,
(3)
where P
s
,s
is the probability that the signal
has a value in the histogram representing the mutual
information function. Informally, this function
quantifies the information that we have about s
n+L
given that we know sn. Usually, the sampling lag
related to the first minimum of the mutual
information function specifies the point where the
information about s
n+L
given knowledge of s
n
or the
redundancy has a local minimum.
Another important concept in chaos theory is the
fractal dimension. Fractal dimensions quantify the
self-similarity of a geometrical object (Liebert and
Schuster, 1989). One of the most used dimensions is
the correlation dimension which is non integer for
chaotic data indicating the presence of strange
attractors. It can be calculated using correlation
integral, which is an estimate of the probability that
two points on the attractor lay less than a distance R
from each other. Given the N values of the series
and for fixed embedding dimension d and time lag L
, we calculate the percentage of points within a
certain distance R from one another, for increasing
values of R, through the correlation integral (C(R)).
As proposed in (Hilborn, 2000), C(R) can be
calculated as given by (4) for a fixed time lag L:
C
R
∑∑
HR
‖
y
i
yj
‖
,
(4)
Where H(x) is the Heaviside step function with
H(x) =1 for x>0, and H(x) =0 for x≤0. A log/log
TraditionalvsAgileDevelopment-AComparisonUsingChaosTheory
111

plot of the output and an estimate of the slope of the
linear region of this graph gives the correlation
dimension dc due to the fact that, by increasing the
value of R, C(R) should increase as R
dc
, or, after
taking the logarithm of both sides, Log (C(R)) = dc
Log (R) + constant. We repeat these calculations for
increasing values of embedding dimensions d while
keeping the value of the time lag L fixed. The value
of dc should eventually converge, by increasing d, to
the true value of the fractal dimension of the
attractor. Usually, the proper embedding dimension
must be an integer greater than or equal to twice d
plus one (Hilborn, 2000).
A common method for the identification of
chaos in state-space systems is to calculate the
largest Lyapunov exponent (LLE) (Shinbrot et al.,
1993, Mandel, 1995). The calculation of this
exponent from time series data has been extensively
considered in the literature (Ramasubramanian and
Sriram, 2000). Lyapunov exponents represent the
average exponential rates of divergence or
convergence of nearby orbits in phase space
(Shinbrot et al., 1993). Any system containing at
least one positive Lyapunov exponent is defined to
be chaotic, with the magnitude of the exponent
reflecting the time scale on which system dynamics
become unpredictable (Wolf et al., 1985). To
calculate Lyapunov exponent, a step by step
evolution of a pair of points, a reference one and a
candidate one is done. Each time the distance
between these two points becomes too long, a
replacement procedure of the candidate is applied in
such a way that the orientation between the new pair
of points is as close as possible to that of the original
pair. The details of the used algorithm for
calculating Lyapunov exponent can be found in
(Wolf et al., 1985). Another method for detecting the
presence of chaos is the calculation of correlation
dimension as given in (4). The non-integer value
indicates the existence of chaos (Packard et al.,
1980).
3 AN EXPERIMENTAL STUDY
3.1 Subject Systems
To evaluate our approach we used as case studies
two open source systems. The first one is FileZilla
(http://filezilla-project.org/) which is an open source,
cross-platform, and FTP client. This system was
developed using traditional methods. The second
system is Suneido (http://sourceforge.net/
projects/suneido/) which is an open source system
for developing and deploying applications across
networks using an object-oriented programming
language IDE. Both systems are written in C++. We
used 20 subsequent versions of each system. The
used versions of FileZilla have the time span from 3-
11-2004 to 30-11-2007. Meanwhile, the used
versions of Suneido cover the time span from 29-9-
2001 to 28-10-2007.
3.2 Experimental Analysis
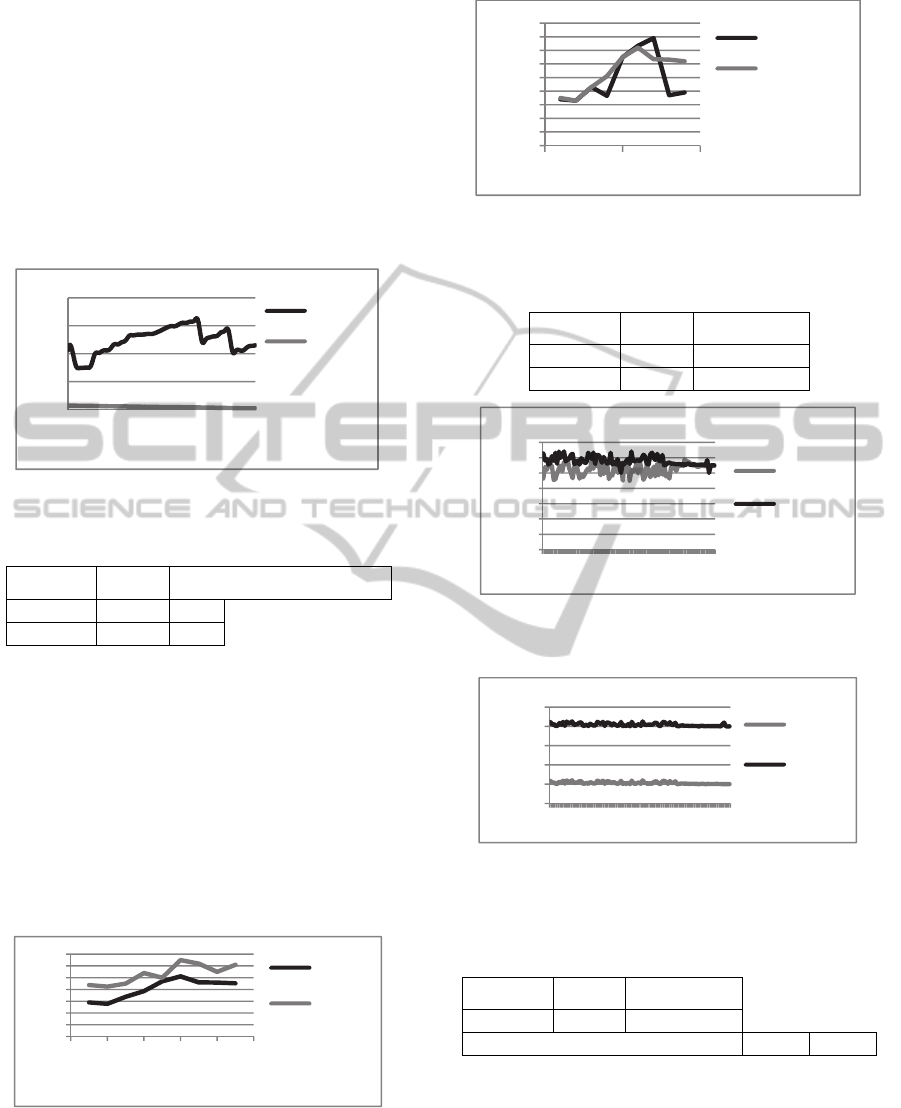
Figures 1 and 2 show the SLOC and Complexity
values in the two sequences for FileZilla and
Suneido respectively. Before starting the modelling
process, we interpolated the sequences of metrics
values for the two systems. This step is necessary for
sampling more data points to make the next analysis
steps feasible. For instance, Figure 3 shows the
interpolated time series for FileZilla. The time step
is calculated as the difference between the release
date of the last and the first version studied divided
by the number of points. Thus it was set to 1.4 day
(4x12x30/1000) approximately
.
Figure 1: SLOC Sequences for the two systems.
Figure 2: Complexity Sequences for the two systems.
Mutual information is calculated for each set of
data points using (3). The first minimum of mutual
information is used to determine the optimal time
delays. Table 1 indicates the calculated optimum
time delays for each data set.
We then calculate the correlation dimension for
each of the used datasets. Then using (4), we
calculated logC(R) and log(R) for different
0
50
100
150
0 5 10 15 20
KSLOC
FileZilla
KSLOC
Suneido
KSLOC
0
2
4
6
8
01020
Cyclomatic Complexity
FileZilla
Complexity
Suneido
Complexity
ICSOFT-PT2014-9thInternationalConferenceonSoftwareParadigmTrends
112
embedding dimensions d ranging from 1 to 10 for
the four sequences. The slope of the linear part
approximates dc. Figure 4 and Figure 5 show the
correlation dimension (dc) vs. the embedding
dimension (d) for the used sequences. It should be
mentioned that as d increases dc saturates at a non-
integer value (ds) which indicates chaos. Correlation
dimensions for the used sequences are presented in
Table 2. As shown in the table, correlation
dimensions are non-integers which also indicates
chaos.
Figure 3: Interpolated time series for FileZilla.
Table 1: Time delays for the used systems.
Syste
m
SLOC Complexity
FileZilla 29 21
Suneido 33 28
Another indication of chaos is the positive LLE.
Figure 6 and Figure 7 show that LLE’s for SLOC
and Complexity sequences of the two systems are
positive. Meanwhile, Table 3 represents the final
value of LLE’s for the four sequences which are the
saturated LLE’s in Figure 6 and 7. As shown in the
table, Suneido’s sequences have larger LLE’s
values. This indicates that the source code and
complexity of Suneido are less predictable than
FileZilla and that it has a larger rate of information
change than that of FileZilla.
Figure 4: Correlation dimension (dc) vs. embedding
dimension (d) for SLOC sequences.
Figure 5: Correlation dimension (dc) vs. embedding
dimension (d) for Complexity sequences.
Table 2: Correlation dimensions for the used systems.
Syste
m
SLOC Complexity
FileZilla 1.62 1.19
Suneido 1.86 1.41
Figure 6: Largest Lyaponuv exponent (LLE) for SLOC
sequences.
Figure 7: Largest Lyaponuv exponent (LLE) for
Complexity sequences.
Table 3: Largest Lyapunov Exponents for the used
systems.
Syste
m
SLOC Complexity
FileZilla 0.455 0.10
Suneido 0.457 0.13
4 CONCLUSIONS
This paper presents a comparison between agile and
waterfall development methods using the Chaos
Theory. Two open source systems that were
developed using the two development methods are
0
50
100
150
200
1 201 401 601 801
Time steps ( x 1.4 day)
SLOC
Complexity
0,8
1
1,2
1,4
1,6
1,8
2
2,2
0246810
d
c
Embedding dimension (d)
FileZilla
SLOC
Suniedo
SLOC
0,8
0,9
1
1,1
1,2
1,3
1,4
1,5
1,6
1,7
0510
d
c
Embedding dimension (d)
FileZella
Complexity
Suneido
Complexity
0,4
0,41
0,42
0,43
0,44
0,45
0,46
0,47
1
11
21
31
41
51
61
71
81
91
LLE
Time Steps
FileZilla
KSLOC
Suneido
KSLOC
0,09
0,1
0,11
0,12
0,13
0,14
1
11
21
31
41
51
61
71
81
91
LLE
Time Step
FileZilla
Complexity
Suneido
Complextiy
TraditionalvsAgileDevelopment-AComparisonUsingChaosTheory
113

used as case studies. The analyses of subsequent
versions of the two systems show that both systems
have chaos. Furthermore, the system developed
using agile methods is more chaotic than the one that
was developed using traditional methods. Although
being chaotic has several drawbacks, for instance,
complex undetermined behaviour and high
sensitivity to changes in initial conditions, however,
a chaotic system has many advantages e.g.,
flexibility, creativity and stability. In addition, for
chaotic systems with large LLE, a quick settlement
to the steady state is expected. Thus, agile
development results in a more chaotic system with
varying and constantly changing elements that settle
down more quickly than those developed using
waterfall methods.
As a future work, more systems need to be
analyzed to be able to generalize the findings.
Another set of interesting questions include the
following. What quality attributes of the software
are more chaotic when agile methods are used?
What agile
approaches produce more chaotic
systems, and why?
REFERENCES
Beck, K. & Andres, C. 2004. Extreme Programming
Explained: Embrace Change, Addison-Wesley
Professional.
Casdagli, M. 1989. Nonlinear Prediction Of Chaotic Time
Series. Physica D: Nonlinear Phenomena, 35,335-356.
Casdagli, M., Eubank, S., Farmer, J. D. & Gibson, J. 1991.
State Space Reconstruction In The Presence Of Noise.
Physica D: Nonlinear Phenomena, 51, 52-98.
Cem Kaner, S. M., Walter P. Bond. Software Engineering
Metrics: What Do They Measure And How Do We
Know? In Metrics 2004. Ieee Cs, 2013.
Fraser, A. M. & Swinney, H. L. 1986. Independent
Coordinates For Strange Attractors From Mutual
Information. Physical Review A, 33, 1134.
Highsmith, J. 2013. Adaptive Software Development: A
Collaborative Approach To Managing Complex
Systems, Addison-Wesley.
Hilborn, R. C. 2000. Chaos And Nonlinear Dynamics: An
Introduction For Scientists And Engineers, Oxford
University Press.
Huo, M., Verner, J., Zhu, L. & Babar, M. A. Software
Quality And Agile Methods. Computer Software And
Applications Conference, 2004. Compsac 2004.
Proceedings Of The 28th Annual International, 2004.
Ieee, 520-525.
Larman, C. 2003. Agile And Iterative Development: A
Manager's Guide, Addison-Wesley Professional.
Liebert, W. & Schuster, H. 1989. Proper Choice Of The
Time Delay For The Analysis Of Chaotic Time Series.
Physics Letters A, 142, 107-111.
Mandel, D. R. 1995. Chaos Theory, Sensitive Dependence,
And The Logistic Equation.
Martin, R. C. 2003. Agile Software Development:
Principles, Patterns, And Practices, Prentice Hall Ptr.
Packard, N., Crutchfield, J., Farmer, J. & Shaw, R. 1980.
Geometry From A Time Series.
Raccoon, L. 1995. The Chaos Model and The Chaos Cycle.
Acm Sigsoft Software Engineering Notes, 20, 55-66.
Ramasubramanian, K. & Sriram, M. 2000. A Comparative
Study Of Computation Of Lyapunov Spectra With
Different Algorithms. Physica D: Nonlinear
Phenomena, 139, 72-86.
Schwaber, K. & Beedle, M. 2002. Gilè Software
Development With Scrum.
Shawky, D. M. 2008a. The Application Of Rough Sets
Theory As A Tool For Analyzing Dynamically
Collected Data. Journal Of Engineering And Applied
Science, 55, 473-490.
Shawky, D. M. 2008b. Towards Locating Features Using
Digital Signal Processing Techniques. Journal Of
Engineering And Applied Science, 50, 1-20.
Shawky, D. M. & Ali, A. F. A Practical Measure For The
Agility Of Software Development Processes. Computer
Technology And Development (ICCTD), 2010 2nd
International Conference On, 2-4 Nov. 2010 2010a.
230-234.
Shawky, D. M. & Ali, A. F. An Approach For Assessing
Similarity Metrics Used In Metric-Based Clone
Detection Techniques. Computer Science And
Information Technology (ICCSIT), 2010 3rd IEEE
International Conference On, 9-11 July 2010 2010b.
580-584.
Shawky, D. M. & Ali, A. F. Modeling Clones Evolution In
Open Source Systems Through Chaos Theory.
Software Technology And Engineering (Icste), 2010
2nd International Conference On, 3-5 Oct. 2010 2010c.
V1-159-V1-164.
Shinbrot, T., Grebogi, C., Ott, E. & Yorke, J. A. 1993.
Using Small Perturbations To Control Chaos. Nature,
363, 411-417.
Sommerville, I. 1996. Software Process Models. Acm
Computing Surveys (Csur), 28, 269-271.
Sommerville, I. & Kotonya, G. 1998. Requirements
Engineering: Processes And Techniques, John Wiley &
Sons, Inc.
Takens, F. 1981. Detecting Strange Attractors In
Turbulence. Dynamical Systems And Turbulence,
Warwick 1980. Springer.
Tsoukas, H. 1998. Introduction: Chaos, Complexity And
Organization Theory. Organization, 5, 291-313.
Wang, L. & Vidgen, R. 2007. Order and Chaos In Software
Development: A Comparison of Two Software
Development Teams In a Major It Company.
Wang, L., Xing, X. & Chu, Z. On Definitions Of Chaos In
Discrete Dynamical System. Young Computer
Scientists, 2008. Icycs 2008. The 9th International
Conference for, 2008. Ieee, 2874-2878.
Wolf, A., Swift, J. B., Swinney, H. L. & Vastano, J. A.
1985. Determining Lyapunov Exponents From A Time
Series. Physica D: Nonlinear Phenomena, 16, 285-317.
ICSOFT-PT2014-9thInternationalConferenceonSoftwareParadigmTrends
114
