
Cycle-to-Cycle Transient Model of 4-stroke Combustion Engines
Madan Kumar and Tielong Shen
Department of Engineering and Applied Science, Sophia University, Tokyo, Japan
Keywords:
Modeling, Combustion Engines, Discrete-time System.
Abstract:
In 4-stroke combustion engines, managing the cycle-to-cycle transient characteristics of the mass of the air,
the fuel and the burnt gas is an important issue due to the cycle-to-cycle coupling caused by the imbalance
of cyclic combustion. This paper presents a discrete-time model that represents the cycle-to-cycle transient
behavior of in-cylinder state variables under the assumption of measurability of the total gas mass and the
residual gas fraction. It is shown that if the state variables are chosen as total fuel mass, residual unburnt
air and the burnt gas mass, then the system is modeled as a time-varying linear system. Validation results is
demonstrated which conducted on a full-scaled gasoline engine test bench.
1 INTRODUCTION
In internal combustion engine, combustion inside the
cylinder is a complex phenomena and exhibit sub-
stantial cycle-to-cycle variation. This cyclic variation
is observed to stochastic in process. Some physical
model has been developed to characterized the tran-
sient behavior of engine phenomena on cycle basis
[(Rizzoni, 1989),(Peyton Jones, 2010)]. This cyclic
variation affects the engine performance, such as air-
fuel ratio, torque generation and so on. The mainly
affecting variables are residual gas, unburned fuel and
unburned air succeeding the next cycle from previous
cycle. There are so many factors that influence the
cyclic residual gas, and it is not feasible to represent
the influence mathematically in general. Analysis and
research in this area is continue from 19th century
(Clerk,1886) and still there is some gap in satisfactory
solution. In engine research’s, researchers mainly aim
to improve the power generation and reduce the emis-
sion due to the limitation of sources of fuel and envi-
ronmental pollution effect. The engine performance
goes down with the increases of residual gas in en-
gine cylinder. However it decreases the emission as
NOx decreases in cylinder due to in-cylinder temper-
ature decreases.
On another side, a good modeling mechanism of
the engine is also a fact to improve the performance
of engine. Since the in-cylinder phenomena like in-
cylinder air, fuel and residual gas compositions are
not measurable directly except to in cylinder pressure,
model based observers are thus necessary to estimate
these quantities. This ambiguity has created a con-
tinuing challenging to find a suitable control model
to estimate the true nature of in-cylinder cycle-to-
cycle behavior [(Daw, 1996),(Daw, 1998),(Jonathan,
2008),(Yang, 2013)].
In this paper a discrete-time model that represents
the cycle-to-cycle transient behavior of in-cylinder
state variables under the assumption of measurabil-
ity of the total gas mass and the residual gas fraction
is proposed. The system is modeled as a time-varying
linear system as the state variables are chosen as to-
tal fuel mass, residual unburnt air and the burnt gas
mass.Validation results are demonstrated which con-
ducted on a full-scaled gasoline engine test bench.
The detail about the evaluation of total charge and
residual gas fraction are discussed in next section.
2 SYSTEM DESCRIPTIONS
As is well known that the in-cylinder gas and com-
bustion phenomena are difficult to measured directly
on cycle-to-cycle basis in engine dynamic systems. In
internal combustion engines, fuel and air goes inside
the engine cylinder and releases heat energy due to
the chemical reaction happened between fuel and air
and this heat energy is used to convert in mechanical
energy to produced the work. In four strokes engine,
one cycle includes the suction, compression, combus-
tion and exhaust process. In general, fresh air and
fuel mixture enters in cylinder during suction stroke
and it compressed during compression in four stroke
745
Kumar M. and Shen T..
Cycle-to-Cycle Transient Model of 4-stroke Combustion Engines.
DOI: 10.5220/0005095107450750
In Proceedings of the 4th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2014),
pages 745-750
ISBN: 978-989-758-038-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
gasoline engine. For the start of combustion, spark
is generated 30 to 40 deg. before top dead centre
(TDC) which depends upon the engine configuration
and power required. In combustion stroke due to high
pressure and temperature inside the cylinder, piston
pushed out towards bottom dead centre (BDC) by the
in-cylinder high pressure and temperature charge and
hence power transfered to crank shaft. At the end of
combustion stroke, the exhaust valve open and ex-
haust gas expelled due to the high pressure of gas
inside the cylinder. In advance research, the direct
injection gasoline is used for improved the combus-
tion phenomena and performance of engines in which
gasoline is direct injected in port or in cylinder which
is named as gasoline direct injection (GDI) engine.
Due to the limitation in engine design, the exhaust
gas in one cycle does not expelled fully during the ex-
haust stroke and it remains for the next cycle which
affects the combustion in next cycle. The engine per-
formance is affected due to this remained gas in cylin-
der.
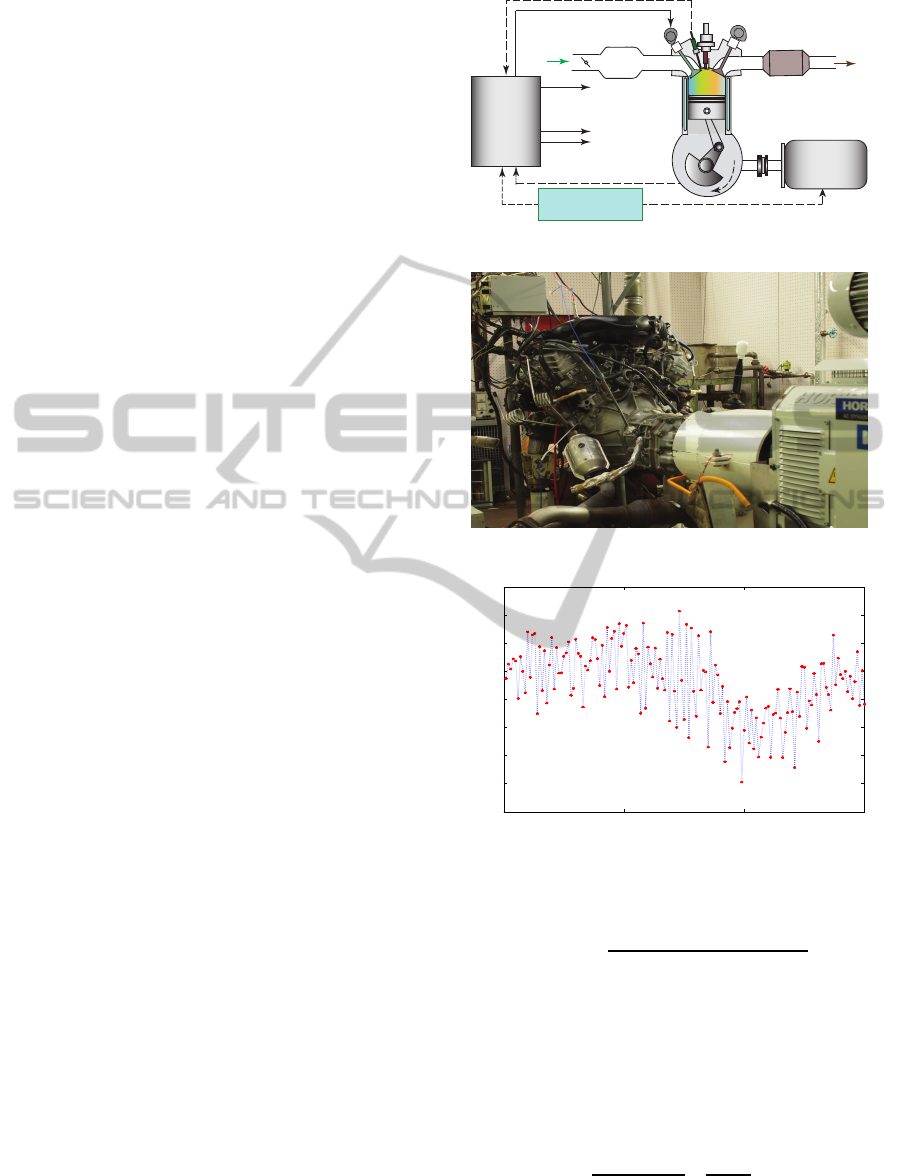
In engine, variable valve timing (VVT) system,
engine speed and load also affects the cycle to cy-
cle variation. A schematic diagram of experimental
setup with VVT control system is shown in Fig.1. A
gasoline 3.5L engine is used for the experiment which
is supported by Toyota Motors Corporation (Fig.2).
This engine having port and direct injection system
and engine is well instrumented to get almost full data
to analyze the engine behavior. In this engine, VVT
system is also in-build for the analysis of the effects
of VVT on in-cylinder gas contains during cycle-to-
cycle fluctuation. For control and capturing the data,
ECU and dSPACE are used.
In this experimental test bench, experiment is con-
ducted for the measurement of total charge and resid-
ual gas estimation on the cycle basis keeping the fixed
spark advance and torque and varying the VVT. The
variation in the magnitude of total charge and residual
gas is observed to fluctuate on cycle to cycle basis. A
sample of variation in residual gas fraction (RGF) on
cycle basis is shown in Fig.3. From figure 3, it is ob-
served that the cyclic variation of residual gas fraction
is in stochastic process which cannot be predicted eas-
ily for the next cycle.
The total charge is calculated in compression
stroke before start of combustion and residual gas
fraction (RGF) at the end of exhaust stroke on cycle
to cycle basis. The total charge in-cylinder can be
calculated by two method. (a). Using the direct mea-
surement of fresh inducted air, fresh injected fuel and
estimated RGF using pressure sensor. (b). Using the
in-cylinder pressure data. The total charge estimated
by direct measurement of fresh inducted air, fuel in-
Exhaust Gas
6. Exhaust VVT
2. Intake Manifold
Air ow
5. Spark Plug
dSPACE
+
ECU
Dynamometer
Control Panel
1
5
2
3
4
6
7
3. Intake VVT
4. Pressure Sensor
1. Throttle
7. Ehxaust Muer
Dynamometer
Figure 1: Schematic diagram of experimental setup.
Figure 2: Engine Setup.
0 50 100 150
0.03
0.035
0.04
0.045
0.05
0.055
0.06
0.065
0.07
Cycle
RGF
Figure 3: Cyclic residual gas fraction (RGF) sample.
jected and RGF is as given below,
M
ts
(k) =
m
ind
(k− 1) + m
fn
(k− 1)
(1− r(k))
(1)
where m
ind
(k − 1) and m
fn
(k − 1) are the fresh in-
ducted air charge and injected fuel respectively from
the previous cycle for the combustion of present cycle
on the basis of cycle definition as shown in Fig.5.
In the second method, total charge is calcu-
lated using the in-cylinder pressure data [(Arsie,
2013),(Desantes, 2010)] as given below,
M
tp
(k) =
∆P(k)V
1
(k)
RT
1
(k)
{(
V
1
(k)
V
2
(k)
)
n
− 1}
−1
(2)
where ∆P is the difference of pressure P
2
(k) and
P
1
(k).
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
746
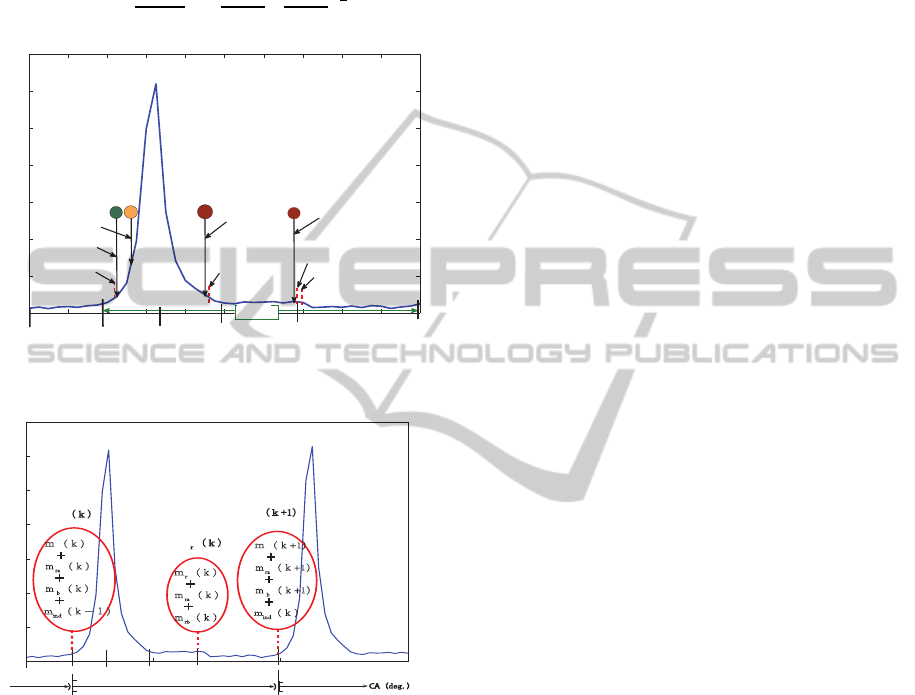
Similarly, the residual gas fraction r(k) at the end
of exhaust stroke can also be calculated using in-
cylinder pressure data as given in equation 3 (Yang,
2013). A figure for suitable measurement points for
pressure and volume is shown in Fig.4.
r(k) =
M
r
(k)
M
t
(k)
= (
V
4
(k)
V
3
(k)
)(
P
4
(k)
P
3
(k)
)
1
n
(3)
0
0
5
10
15
20
25
30
35
CA (deg.)
Cylinder Pressure
BDC
i
BDC
i
P
2
P
4
P
3
P
1
K
th
cycle
BDC
e
TDC
e
40
0
aIVC
i
2
0
aIVC
i
IVC
i
(71
0
aBDC
i
)
EVO
e
(64
0
bBDC
e
)
2
0
bEVO
e
2
0
b TDC
e
EVC
e
0
0
aTDC
e
IVO
i
−3
0
bTDC
i
TDC
i
TDC
c
Figure 4: Pressure measurement points indication in pres-
sure vs crank angle plot.
0
0
5
10
15
20
25
30
35
Cylinder Pressure
BDC
i
BDC
e
TDC
e
BDC
i
TDC
c
K th cycle
TDC
i
K-1 th cycle K+1th cycle
CA㸦GHJ
㸧 㸧
㹫
f
㹫
f
㹫
Uf
M
t
㸦㹩㸧
M
t
㸦㹩㸧
M
㹰
㸦㹩㸧
Figure 5: Gas exchange phenomena between cycle.
3 MODELING
For the development of model, cycle is defined from
BDCi (k) to BDCi(k+1) as kth cycle in which data at
BDCi (k) is included in k
th
cycle and data at BDCi
(k+1) is included in k + 1
th
cycle as shown in Fig.5.
In this model, next cycle (k+ 1
th
cycle) variables can
be estimated using the present cycle (k
th
cycle) vari-
ables using the input control as fresh fuel injection
u
f
. From Fig.5, It can be observe that the total mass
of charge M
t
(k) including fresh charge of present cy-
cle and residual gas mass, unburned air and fuel mass
from previous cycle will be involved for the present
cycle combustion process. A cyclic representation of
gas exchange phenomena during cycle to cycle and in
cycle is shown in Fig.5.
According to cycle definition as shown in Fig.5
and with the assumptions of mass conservation during
the gas exchange in cycle to cycle process, the total
mass of fuel, mass of unreacted air (residual air) and
residual burned gas present for the combustion in k+
1
th
cycle is derived as,
a). The total mass of fuel available at the start of
combustion for k + 1
th
cycle is equal to the summa-
tion of mass of unreacted fuel in k
th
cycle and fresh
fuel injected in k
th
cycle as cycle definition. In math-
ematical form, the equation can be represented as,
m
f
(k+ 1) = m
fur
(k) + m
fn
(k)
= (1−C
f
(k)(r(k))m
f
(k) + u
f
(k)
(4)
b). The unreacted air (residual air) at the start of
combustion in k+ 1
th
cycle is equal to the residual air
which is remained at the end of k
th
cycle and repre-
sented as,
m
ra
(k+ 1) = r(k){ [m
ra
(k) + m
ind
(k− 1)]
−λ
d
C
f
(k)m
f
(k)}
= r(k)m
ra
(k)−λ
d
r(k)C
f
(k)m
f
(k)
+r(k)m
ina
(k− 1)
(5)
c). The burned gas at the start of combustion in k+1
th
cycle is equal to the residual burned gas at the end of
k
th
cycle and is represented as,
m
b
(k+ 1) = r(k)[m
b
(k) +C
f
(k)m
f
(k)
+λ
d
C
f
(k)m
f
(k)]
= r(k)m
b
(k)
+r(k)C
f
(k)(1+ λ
d
)m
f
(k)
(6)
And total mass of charge M
t
(k) before start of
combustion in kth cycle assuming mass conservation
during process is as,
M
t
(k) = m
f
(k) + m
ra
(k) + m
b
(k) + m
ind
(k− 1)
(7)
where, m
f
(k) is the total mass of fuel (= m
fn
(k) +
m
fur
(k − 1)) available in the cylinder at the start
of combustion, m
fur
is unreacted fuel from pre-
vious cycle which is available for the combustion
in present cycle, C
f
is the combustion efficiency,
(u
f
(k) = m
fn
(k)) is fresh fuel injected, r(k) is resid-
ual gas fraction(RGF), m
ra
is unreacted air mass, λ
d
is the stoichiometric air fuel ratio, m
ind
(k− 1) is fresh
air inducted in cylinder during suction stroke and m
b
is burned gas mass.
For the sake of simplicity, the assumptions for
C
f
(k) and r(k) variations for the simulation are con-
sidered as,
1). C
f
(k) = C
0
(1+σ(k)) = C
0
+ e(k),
e(k) ∈ N(0, σ
2
)
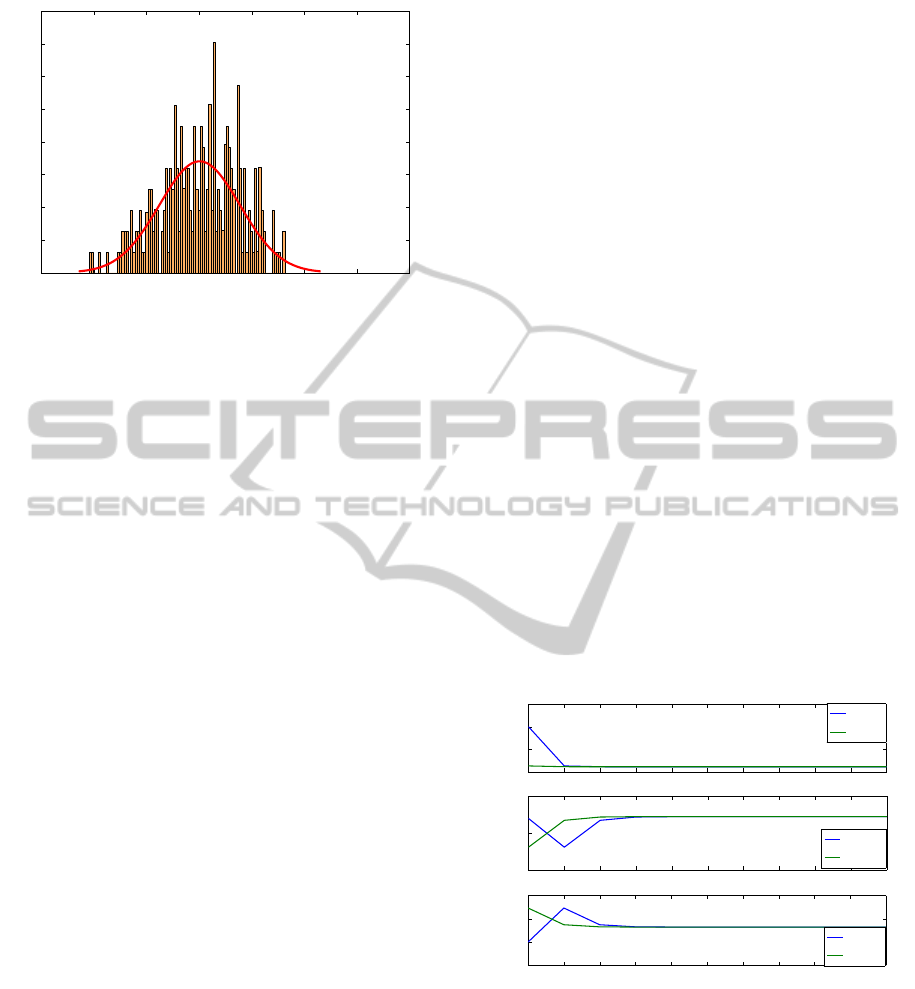
2). r(k) is measurable using equation 3 and a dis-
tribution sample is given in below Fig 6.
Cycle-to-CycleTransientModelof4-strokeCombustionEngines
747
0.04 0.045 0.05 0.055 0.06 0.065 0.07 0.075
0
50
100
150
200
250
300
350
400
r(k)
Probability
Figure 6: r(k) distribution sample.
where, e(k) is the variance of the distribution.
Equation number 4, 5 and 6 can be written in ma-
trix form as given below,
m
f
(k+ 1)
m
ra
(k+ 1)
m
b
(k+ 1)
=
(1−C
f
(k))r(k) 0 0
−λ
d
r(k)C
f
(k) r(k) 0
r(k)C
f
(k)(1+ λ
d
) 0 r(k)
m
f
(k)
m
ra
(k)
m
b
(k)
+
1
0
0
u
f
(k) +
0
r(k)
0
(∆+ ζ(k))
(8)
For the modeling and control systems, two assump-
tions are consider as follows,
1). m
ind
(k− 1) = ∆ + ζ(k)
2). y(k) = M
t
(k) − ∆
where, y(k) = Σx(k), ∆ is constant and assumed
to measurable (= m
ind
(k − 1)), ζ(k) is variance (
ζ(k) ∈ N(0, σ
2
).
Then finally from equation 8, the discrete time
model for estimation of cycle to cycle behaviors and
its control is represented as,
x(k+ 1) = A(k)x(k) + B
1
u
f
(k)
+B
2
(k)(∆+ ζ(k))
(9)
y
mod
(k) = Cx(k) + ζ(k)
(10)
where x(k) is the state variables and A(k), B
1
(k),B
2
(k)
and C are constants as given below,
x(k) =
m
f
(k)
m
ra
(k)
m
b
(k)
, C =
1 1 1
,
A(k) =
(1−C
f
(k))r(k) 0 0
−λ
d
r(k)C
f
(k) r(k) 0
r(k)C
f
(k)(1+ λ
d
) 0 r(k)
,
B
1
=
1
0
0
and B
2
(k) =
0
r(k)
0
4 VALIDATION
Validation of model is done on the static state using
fixed input and variables and also on the actual ex-
perimental data. The influence of variables are also
found out in this section adding some noise in fixed
input variables and parameters.
4.1 Simulation Results
In this case, initially fixed input data is used for
the validation of model is as, C
f
(k) = 0.8 , r(k)
= 0.1, ∆ =15 mg, u
f
(k) = ∆/14.6 and x(0) =
1 1.5 0.8
T
.
Using the above initial input data in model, the
equilibrium points of initial value of x(0) are cal-
culated by simulation and thereafter this equilibrium
data is used as initial value of x(0) for further analysis.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1.0484
1.0484
1.0484
1.0484
x 10
−6
m
f
m
f
(k)
m
f
(k+1)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
3.0605
3.061
3.0615
x 10
−7
m
ra
m
ra
(k)
m
ra
(k+1)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1.4537
1.4537
1.4538
1.4538
x 10
−6
Time (s)
m
b
m
b
(k)
m
b
(k+1)
Figure 7: x(k) and x(k+1).
A variation in state variables x(k) and x(k+ 1) are
shown in Fig.7. In this graph, it can be observe that
the both signals are able to merged after some delay
of time during simulation. The input signal C
f
(k) and
r(k) have added 20 percent noise in signal and also
input value of u
f
(k) is changed by magnitude of 15
percent for 10 second during the simulation time for
the observing the influence of fuel injection on x(k)
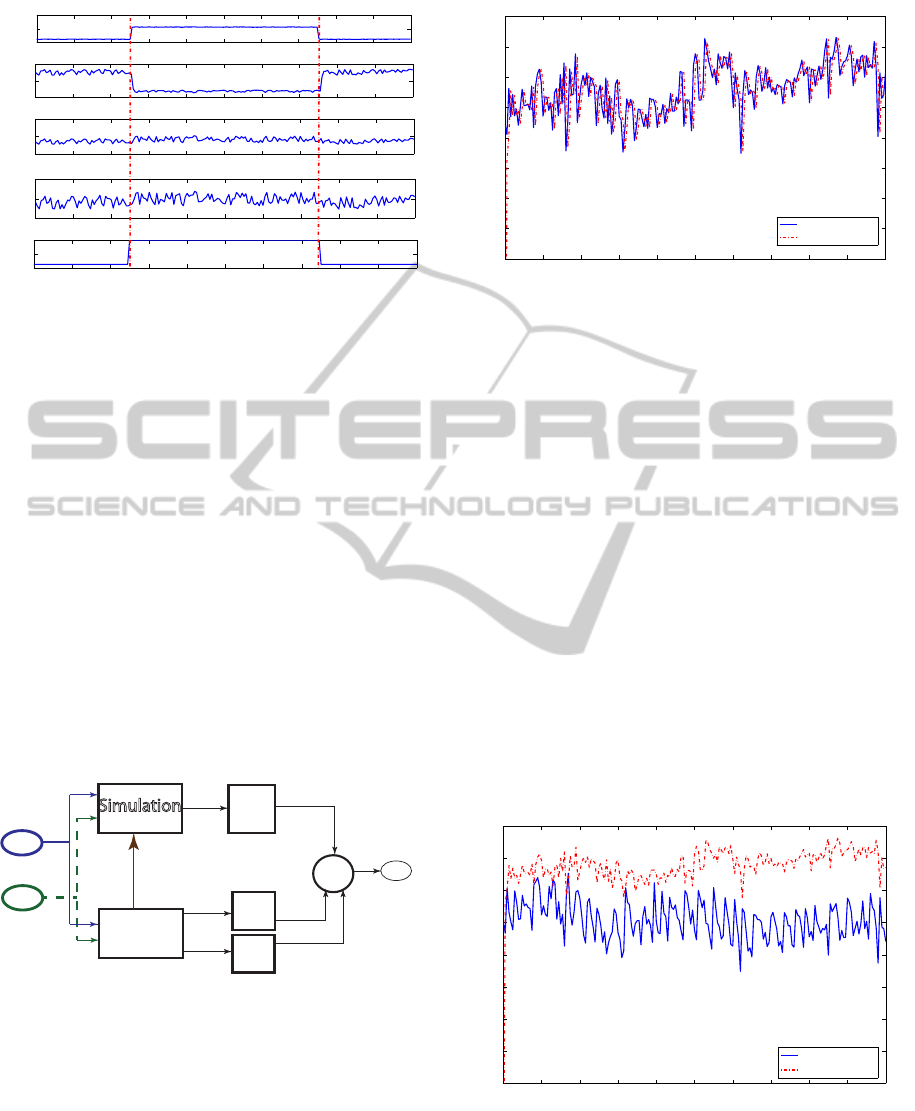
and y(k). The result is as shown in Fig.8. From figure,
it can be seen that due to changes of u
f
(k), m
f
(k)
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
748
0 2 4 6 8 10 12 14 16 18 20
1
1.2
1.4
x 10
−6
m
f
0 2 4 6 8 10 12 14 16 18 20
0
2
4
x 10
−7
m
ra
0 2 4 6 8 10 12 14 16 18 20
0
2
4
x 10
−6
m
b
0 2 4 6 8 10 12 14 16 18 20
2
3
4
x 10
−6
y
mod
(k)
0 2 4 6 8 10 12 14 16 18 20
1
1.1
1.2
x 10
−6
Time (s)
u
f
(k)
Figure 8: Influence of u
f
(k) on x(k) and y(k).
and m
ra
(k) are changes significantly but there are less
influence on m
b
(k) and y
mod
(k) is noted.
4.2 Experimental Validation
For the model validation in realistic condition of en-
gine behavior, the experimental data of RGF and total
charge from engine experiment are used for simula-
tion. The value of y(k) calculated from the model and
from the engine data are compared in this section. A
block diagram of simulation is shown in Fig.9. From
the block diagram, it can be seen that the m
ind
and
u
f
are the input variables for the engine and simula-
tion both. From simulation, we can find the value of
y
mod
(k) using the RGF data from the engine experi-
ment. On another side, the y
cal
(k) can also be calcu-
lated from the engine experimental data.
Simulation
ENGINE
m
ind
u
f
RGF
x(k)
M
tp
(k)
M
ts
(k)
equ-
(10)
equ-
(11)
equ-
(12)
y
cal
(k)
y
mod
(k)
Error
+
-
Figure 9: Block diagram of simulation.
4.2.1 Validation using M
ts
(k)
In this case, y
cal
(k) is calculated using the below
given formula and compared with the y
mod
(k) model,
y
cal
(k) = M
ts
(k) − ∆
(11)
where M
ts
(k) can be calculated using equation (1) and
∆ can be measured by sensor. A comparison graph of
y
cal
(k) and y
mod
(k) is shown in Fig.10. From graph
0 2 4 6 8 10 12 14 16 18 20
1.05
1.1
1.15
1.2
1.25
1.3
1.35
1.4
x 10
−4
Time (s)
y(k)
y
cal
using M
ts
y
mod
(k) using model
Figure 10: y
cal
(k) and y
mod
(k).
it can be observed that the y
cal
(k) and y
mod
(k) are ap-
proximately equal after some delay of simulation cy-
cle.
4.2.2 Validation using M
tp
(k)
In this case, y
cal
(k) is calculated using the below
given formula and compared with the y
mod
(k) model,
y
cal
(k) = M
tp
(k) ∗ r(k) + m
fn
(k− 1)
(12)
where M
tp
(k) can be calculated using equation
(2). A comparison graph of y
cal
(k) and y
mod
(k) is
shown in Fig.11. Form this graph it can be observed
that the error between y
cal
(k) and y
mod
(k) is more
compared to previous method which is due to the
propagation of error in M
tp
(k), r(k) and m
fn
(k − 1)
measured by the pressure and fuel sensors.
0 2 4 6 8 10 12 14 16 18 20
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
x 10
−4
Time (s)
y(k)
y
cal
(k) using M
tp
y
mod
(k) using model
Figure 11: y
cal
(k) and y
mod
(k)
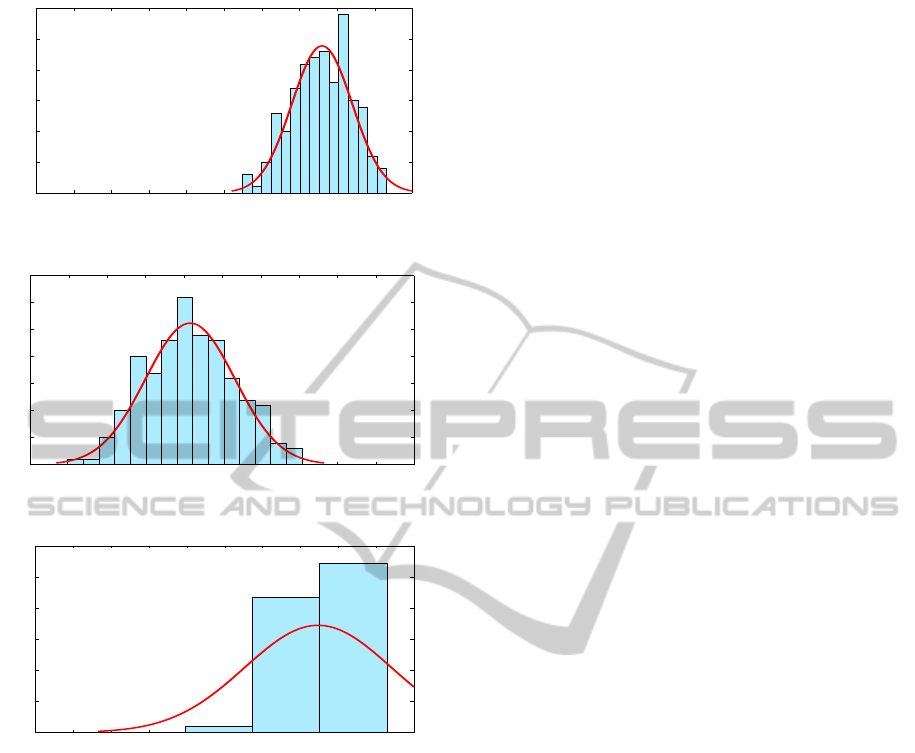
The distribution of y
cal
for the simulation time of
20 second are plotted in Figures 12 ,13 and 14. In fig-
ures 12 and 14, the distribution of y
cal
measured by
M
ts
and y
mod
respectively is plotted in which mean
Cycle-to-CycleTransientModelof4-strokeCombustionEngines
749
0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
x 10
−4
0
5
10
15
20
25
30
y(k) [M
ts
]
Probability
Figure 12: Probability distribution of y
cal
(k) using M
ts
.
0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
x 10
−4
0
5
10
15
20
25
30
35
y(k)[M
tp
]
Probability
Figure 13: Probability distribution of y
cal
(k) using M
tp
.
0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
x 10
−4
0
20
40
60
80
100
120
y(k)[model]
Probability
Figure 14: Probability distribution of y
mod
(k) using model.
value of data distribution seems to be equal. That
shows the model and experimental results are seems
to be satisfactory. In figures 12 and 13, the distribu-
tion of y
cal
measured by M
tp
and y
mod
are observed to
be different mean value.
5 CONCLUSIONS
A discrete-time model is developed and validated
with the static and transient mode. The model is also
validated using the real engine experimental data. The
y(k) calculated using the two methods of total charge
estimation and y (k) from model are compared. The
error in y(k) in case of M
tp
(k) is higher than the cal-
culated by M
ts
(k) due to the propagation of error in
different measured variables. In further continuing of
this research work, validation of model will be done
based on the y(k) measured using M
tp
by the adding
of some correction factor to minimized the error at
different operating condition of engine data. A ob-
server will be established to control the air-fuel ratio,
torque and RGF using above model on cycle basis.
ACKNOWLEDGEMENTS
The authors wish to acknowledge the Toyota Motors
Corporation for the supporting in this research and
helpful discussions and Mr. Mingxin Kang for the
helping in conduct the experiment:
REFERENCES
Rizzoni G. (1999). A stochastic model for the indicated
pressure process and the dynamics of internal com-
bustion engine. IEEE Trans. Veh. Technol., vol.38, no.
3, pp.180-192, Aug. 1989.
Peyton Jones, J. C., Roberts J. B., and Landsborough K.J.
(2010). A cumulative-summation-based stochastic
knock controller. Proc. Inst. Mech. Eng., vol.224, no.
7, pp. 969-983, 2010.
Clerk, D. (1886). The gas engine. 1st ed., Longmans, Green
and Co., 1886.
Daw, C. S., Finney, C. E. A., Green, J. B., Kennel, M. B.,
and Thomas, J. F. (1996). A simple model for cyclic
variations in a spark-ignition engine. SAE Warrendale,
PA,.962086, May 1996.
Daw, C. S., Finney, C. E. A., Kennel, M. B., and Connolly,
F. T. (1998). Observing and modeling nonlinear dy-
namics in an internal combustion engine. Phys. Rev.
E., vol.57, no.3, pp. 2811-2819, 1998.
Arsie, I., Rocco, D., L., Pianese, C., and Cesare, M., D.
(2013). Estimation of in-cylinder mass and AFR by
cylinder pressure measurement in automotive Diesel
engines. IFAC World Congress, 2013.
Desantes, J. M., Galindo, J., Guardiola, C., and Dolz, V.
(2010). Air mass flow estimation in turbocharged
diesel engines from in-cylinder pressure measure-
ment. Experimental Thermal and Fluid Science, vol.
34, pp. 37-47, 2010.
Yang, J., Shen, T., and Jiao, X. (2010). Model-based
stochastic optimal air-fuel ratio control with Residual
gas fraction of spark ignition engine IEEE, 2013.
Jonathan, B. V., Brian, C. K., Jagannathan, S., and
Drallmeier, J.,M (2008). Optput feedback controller
for operation of spark ignition engines at lean con-
ditions using neural networks. IEEE, vol. 16, no. 2,
March 2008.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
750
