
Adaptive Embedded Systems
New Composed Technical Solutions for Feasible Low-Power and Real-time Flexible
OS Tasks
Hamza Chniter
1,2,3
, Mohamed Khalgui
1,2
and Fethi Jarray
3,4
1
INSAT Institute, University of Carthage, Carthage, Tunisia
2
FST faculty, University of Elmanar, Elmanar, Tunisia
3
ISI Institute, Mednine, Tunisia
4
Laboratoire CEDRIC, CNAM, 292 rue St-Martin 75141, Paris cedex 03, France
Keywords:
Flexible Embedded System, Reconfiguration, Real-time and Low-power Scheduling, Integer Programming,
Heuristic.
Abstract:
The paper deals with low-power adaptive scheduling of synchronous and flexible real-time OS tasks. A soft-
ware reconfiguration scenario is assumed to be any run-time operation allowing the addition-removal-update
of OS tasks to adapt the system to its environment under well-defined conditions. The problem is that any
reconfiguration can push the system to an unfeasible behavior where temporal properties are violated or the
energy consumption is possibly high and unacceptable. A task in the system can change its characteristics
at any time when a reconfiguration scenario is applied, it can also be stopped or replaced by another one.
The difficulty is how to find the new temporal parameters of the systems tasks after any reconfiguration. We
use a DVS processor which is with a variable speed to support run-time solutions that re-obtain the system’s
feasibility. The challenge is how to compute the best combinations between available processor speeds for a
good compromise between execution time and energy consumption. We propose a combinatorial optimization
method based on integer programming and heuristics. We propose also a solution when the available speeds
do not allow the feasibility of the system. Both approaches include a mechanism to adjust the deadlines of
tasks to satisfy the feasibility conditions and overcome the problem of rejected tasks. This mechanism makes
the scheduling more flexible and able to react in accordance with its environment.
1 INTRODUCTION
An embedded system(ES) is a device with a dedi-
cated function including hardware and software parts
which form a unique component of a larger physical
system which is expected to run without human in-
tervention. The embedded systems should often run
under real-time constraints that determine their relia-
bility and correctness (Liu and Layland, 1973; Barr,
2007; Heath and Steve, 2003). ES are designed to
control many devices in common use today to meet
a large range of user requirements. Modern embed-
ded systems are often based on microcontrollers and
integrated in more complex systems to perform spe-
cific tasks (Heath and Steve, 2003). The goal is to
optimize it in order to reduce the size, the cost of the
product, and increase the reliability as well as perfor-
mance. Some embedded systems also have real-time
performance constraints that must be met for many
reasons such as safety and usability. Others may have
power constraints that can be violated after particu-
lar reconfiguration scenarios. A configuration sce-
nario is assumed as a runtime software intervention
which act on the system state to allow the addition-
removal-update of OS tasks and consequently adapt
the system to its environment under functional and
extra-functional requirements. A reconfiguration can
change the system behavior where temporal prop-
erties are violated or the energy consumption over-
comes its limit and push the system to a unfeasible
state. One challenge with embedded systems is de-
livering predictably good performance on monitoring
and controlling. In fact, embedded systems have hard
real-time requirements: if computations are not com-
pleted before a deadline, the system will fail, possi-
bly injuring users and can causes many side effects.
Hence the challenge for real-time system researchers
is to develop approaches to design fast systems with
92
Chniter H., Khalgui M. and Jarray F..
Adaptive Embedded Systems - New Composed Technical Solutions for Feasible Low-Power and Real-time Flexible OS Tasks.
DOI: 10.5220/0005066000920101
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 92-101
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

high predicted performance that must provide real-
time response. When a processor is running, reconfig-
urable embedded systems can undergo different dis-
turbances into their environments due to a reconfig-
uration scenario (Imran Rafiq Quadri et al., 2012).
This can lead to the violation of temporal constraints
such as deadlines, increasing in energy consumption
and following a non-feasible system. Configuration
scenarios can be a result of the addition-removal-
update of the tasks in the system. To reach a sys-
tem that gather between providing real-time responses
and low-power consumption, modern embedded sys-
tems integrate new processor technology called DVS
(Dynamic Voltage Scaling)(PARAIN et al., 2000) al-
lowing to dynamically change the processor speed of
OS tasks to make tradeoff between the energy con-
sumption and the execution time. Each processor
will have a set of available operating speeds which
it can operate with. This technology tries to change
the voltage of the chip which is related with the pro-
cessor speed and the duration of tasks execution (He
et al., 2012). The difficulty lies in determining the
best scaling factor of voltage for the whole system at
any instant when a reconfiguration occurs in order to
achieve a new behavior or implementation of the sys-
tem that meets all timing constraints and consumes
less energy. To overcome the problem, we propose a
combinatorial optimization approach based on integer
programming (Hladik et al., 2008), and fast heuristic
(Jeannenot et al., 2004)). The objective is to find the
optimal scaling factor in order to obtain a new fea-
sible system after any reconfiguration such as adding
new tasks to the system. The approach tries to give
additional solutions when the processor drains all the
available scaling factors and the system lies unfeasi-
ble. Those solutions try to adjust the deadlines of the
tasks by using fast optimization approaches to provide
a more flexible system that can properly be adapted to
its environment when any overload condition occurs.
The remainder of this paper is organized as follows.
In Section 2, we discuss the originality of this paper
by studying the state of the art. In section 3, we ex-
pose the problem. We present in Section 4 some ter-
minologies and the contribution dealing with integer
program formulation and proposed heuristic to find
the optimal scaling factors and adjusted deadlines. Fi-
nally, numerical results are presented and discussed in
Section 5.
2 RELATED WORKS
Nowadays, real-time reconfigurable systems need
more and more solutions for flexible and adaptive
scheduling of their tasks under power constraints. The
problem of real-time scheduling is classically to en-
sure the execution of all the tasks at run-time with-
out missing the deadlines where the total energy con-
sumption is minimized (Letters, 1996). The use of
maximum scaling factor of the processor can acceler-
ate the execution time of all tasks and meet the tem-
poral constraints. This can produce significant en-
ergy consumption that exceeds the system capacity,
hence the fact to vary the scaling factor during ex-
ecution becomes a need. A new technology known
as DVS(Dynamic Voltage Scaling) (PARAIN et al.,
2000) is integrated in the new processors for this
purpose to dynamically change the processor speed.
Choosing the suitable scaling factor for the tasks
to ensure the best compromise between the execu-
tion time and the energy consumption remains the
most desired constraint. Several studies have been
performed in this context such as integer program-
ming (Hladik et al., 2008), graph traverse (Heilmann,
2003), branch and bound (Xu, 1993). In (Fang and
Lin, 2013), the authors presented a linear integer pro-
gram to solve the problem by applying DVS tech-
nique for mobile computing platforms. In (cic¸ek and
Celik, 2011) and (Fidanova, 2006), the low-power
scheduling problem was studied for parallel proces-
sors architecture, a simulated annealing and a tabu
search approaches were proposed to solve the prob-
lem. Each task can be divided into a number of parts
called sub-tasks, and each part must be executed on
a separate processor. In (Ying and Cheng, 2010), it
was assumed that all the processors are available and
each processor can handle work on time without pre-
emption. In addition, each arriving job can be pro-
cessed properly. The author in (He et al., 2012) tries
to solve the problem by breaking down the processor
to active and inactive state. He presents a mechanism
to adjust the supply voltage depending on the load
working system for low-power energy consumption.
Genetic algorithms have been also applied to solve
the scheduling problems for multiprocessor schedul-
ing periodic dependent tasks such as in (Nossal, 1998;
Dalfard and Mohammadi, 2012). Two approaches
was proposed in (Chniter et al., 2014) to solve the
scheduling problem in a reconfigurable real-time sys-
tem. The objective is to determine the suitable pro-
cessor scaling factor which meet the corresponding
deadlines and to decrease the energy consumption. In
another way and to reach a flexible system that react
correctly with it environment, (Chantem et al., 2009;
Dwivedi, 2012) present an elastic real-time model
based on period and deadline adjustment. The objec-
tive is to find a solution for rejected tasks in the sys-
tem by changing the period or deadline of OS tasks.
AdaptiveEmbeddedSystems-NewComposedTechnicalSolutionsforFeasibleLow-PowerandReal-timeFlexibleOS
Tasks
93

Among this category, there are those which try to
solve the problem of real-time scheduling by fixing
the adequate scaling factor of processor for a fea-
sible system with a low-power energy consumption.
Nevertheless, no one in related works addresses this
problem by using integer programming and heuristics
to allow optimal reconfiguration real-time scheduling
with power constraints. In addition, they did not con-
sider the case when all the available scaling factors
with which the processor can operate, may not guar-
antee a solution for violated temporal constraints. In
this case, the system may not react in accordance with
its environment and can miss interesting tasks. Other
works like (Buttazzo et al., 1998; Chantem et al.,
2009; Dwivedi, 2012) try this problem but they did
not take into account the energy constraints. They try
to find the adjusted parameters without fixing the ex-
ecution sequence of tasks.
In the present paper we propose an elastic method to
determine the appropriate scaling factor of processor
for a feasible reconfigurable system with a low-power
energy consumption. If the system lies unfeasible,
a proposed solution based in deadline adjustment is
used to meet the new requested constraints after re-
configuration. The proposed method produces the op-
timal scaling factor of processor, new adjusted dead-
lines and the execution sequence of tasks.
3 PROBLEM AND NOTATIONS
We assume a reconfigurable real-time system to
be composed of periodic independent synchronous
tasks. A reconfiguration scenario is any run-time
operation allowing the addition-removal-update
of tasks to adapt the system to its environment.
Nevertheless, the application of a scenario can
increase the energy consumption or push some tasks
to violate the corresponding deadlines. Our goal is to
provide some solutions that will optimize the energy
consumption and guarantee the respect of deadlines
after each reconfiguration scenario. We propose an
Integer Programming model and a heuristic to find
the required solution by changing the scaling factor
of the processor. We construct also a mechanism
that will be applied when no available scaling factor
can fulfill the system requirements. This mechanism
is based on the deadlines adjustment to meet the
corresponding constraints and it presents a solution
for a more flexible and relaxed system which can
react properly with its environment .
Notation:
Let us assume a reconfigurable system to be initially
composed of n periodic tasks T
i
,i = 1 . . . n. We
assume a reconfiguration scenario to add m new
tasks. Each task is characterized by four parameters
according to (Liu and Layland, 1973). Firstly by its
release (or arrival) time r
i
, i.e each task T
i
cannot
begin execution before r
i
. Secondly by its absolute
deadline constraint d
i
, i.e. each task should finish
before d
i
. Thirdly by its computation time at the nor-
malized processor frequency C
ni
. Finally by its period
which is equal to the deadline. It is assumed that the
WCET(Worst Case Execution Time) is constant and
that the tasks will be executed on a single processor
with a variable operating frequency according to
the EDF scheduling policy. We denote respectively
by f
n
and V
n
the normalized frequency and the
voltage of the system. the actual execution time
(i.e. computational delay) of the task is prolonged
when the voltage is decreased to save the energy.
The reason is that the frequency of the processor is
approximately linearly proportional to the supply
voltage(Zhu, 2005). We see that reducing voltage
cuts down the energy dissipation, but the operating
frequency will decrease accordingly. We can see that
the task execution time is inversely proportional to
the voltage. In order to provide the required system
performance, the supply voltage should be scaled as
low as possible to minimize the energy consumption,
while guaranteeing the temporal properties. We
suppose that each task T
i
is executed at frequency
F
i
and at voltage V
i
. We denote by η
i
the reduction
factor of voltage when T
i
is executed, V
i
=
V
n
η
i
. So the
WCET is equal to C
i
= C
ni
η
i
.The power consumption
is P = CV
2
F where C is a constant related to the
circuit type of the processor ensuring that P
i
has
the dimension of a power(He et al., 2012). Hence,
if the system is running over x times, the energy
consumption is E = Px. The problem is then to
allow a low-power and real-time optimal scheduling
of reconfigurable tasks after each reconfiguration
scenario. We assume a simplified model of power,
i.e. The power P
i
consumed by the task T
i
is :
P
i
= CV
i
2
F
i
= C
V
n
f
n
η
i
3
.
The energy E
i
consumed by the task T
i
is:
E
i
= P
i
C
i
= C
V
n
f
n
C
ni
η
i
2
= K
C
ni
η
i
2
with K = CV
n
F
n
.
So the total energy consumption of the system is:
E =
n
∑
i=1
E
i
= K
n
∑
i=1
C
ni
η
i
2
(1)
the CPU charge factor U is calculated by:
U =
n
∑
i=1
C
i
d
i
.
(2)
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
94

where we remember that n denotes the number of
tasks in the system and C
i
, d
i
are respectively the ex-
ecution time and the deadline of the task i.
4 CONTRIBUTION: FLEXIBLE
RECONFIGURABLE
REAL-TIME SCHEDULING
WITH DEADLINE
ADJUSTMENT
This section deals with the proposed methods to com-
pute the scaling factor and estimate the deadline ad-
justment for the tasks after any reconfiguration sce-
nario. The originality of our contribution consists in
finding not only the optimal scaling factors to ensure
temporal constraints but also the adjusted deadlines
which represent a flexible proposed solution when the
processor drains all the available scaling factors and
the system lies unfeasible.
4.1 Mixed Integer Programming Model
The model tries to find the optimal scaling factors and
minimize the total energy consumption of the system
under various operating constraints. We assume that
the tasks will be executed in a single processor sys-
tem with variable scaling factors. It is assumed that
the processor has a set of p available scaling factor.
we denote by m
k
: k = 1..p the k
th
available scaling
factors. We introduce a binary variable to describe the
combination between the scaling factor k and tasks i.
Y
ik
=
1 If the task i is executed with the scaling factor k
i = 1 ...n,k = 1 ... p
0 Otherwise
(3)
Let t
i
be the effective starting time of the task T
i
. Our
goal is to minimize the total consumed energy under
the following operating constraints:
a) No simultaneously executed tasks:
To ensure a single executed task in a time,
we should have either t
j
− t
i
− Cn
i
m
k
Y
ik
≥ 0
or t
i
− t
j
− Cn
j
m
k
Y
jk
≥ 0 or for every pair
of tasks T
i
and T
j
. This condition can be
rewritten as t
i
− t
j
≥ Cn
j
m
k
Y
ik
− Mα
i j
and
t
j
− t
i
≥ Cn
i
m
k
Y
jk
− M(1 − α
i j
) where α
i j
is a
binary variable and M is a big constant. α
i j
= 1
means that T
j
is executed before T
i
.
b) The deadline of each task should be respected
t
i
+Cn
i
m
k
Y
ik
≤ d
i
∀ k (4)
c) The the release time should be respected: t
i
≥
r
i
∀ i.
Thus the basic model is the following:
PS
Minimize α
i
+ K
n
∑
i=1
Cn
i
f
i
2
s.t.
t
i
−t
j
≥ Cn
i
m
k
Y
ik
− Mα
i j
t
j
−t
i
≥ Cn
i
m
k
Y
ik
− M (1 − α
i j
)
αi (t
i
+Cn
i
Y
i j
m
k
) ≤ d
i
∀ i
t
i
≥ r
i
∀ i
α
i
≤ 1
n
∑
i=1
Cn
i
m
k
Y
ik
α
i
dn
i
≤ 1
d
i
=
dn
i
α
i
p
∑
k=1
Y
ik
= 1 ∀ i
t
i
≥ 0 ∀ i
α
i j
∈ {0,1} ∀ i < j
(5)
With f
i
=
p
∑
k=1
(m
k
Y
ik
) is the scaling factor of the
processor to execute the task i.
Case Study
We assume a real-time embedded system to be
composed of 5 tasks as depicted in table 1. The
Table 1: Current system configuration.
Tasks Release time WCET deadline period
T
1
0 13 80 80
T
2
0 6 70 70
T
3
0 30 90 90
T
4
0 13 110 110
T
5
0 26 100 100
current system is feasible since the CPU charge is
equal to 0.959. The energy consumption is equal
to 2.112J = 2112mW . The CPU charge factor U
was calculated by equation (2) and the energy by
the equation (1) previously presented. We assume
a reconfiguration scenario by adding 3 additional
tasks (table 2). The new system becomes infeasible
because the tasks (T
5
,T
8
,T
4
) miss their deadlines
and the CPU charge factor is equal to 1.327. The
energy consumption is also increased and becomes
2,952J = 2952mW .
The goal is to ensure that the feasibility of the
eight tasks while satisfying the energy constraints. So
AdaptiveEmbeddedSystems-NewComposedTechnicalSolutionsforFeasibleLow-PowerandReal-timeFlexibleOS
Tasks
95
Table 2: New system configuration.
Tasks Release time WCET deadline period
T
1
0 13 80 80
T
2
0 6 70 70
T
3
0 30 90 90
T
4
0 13 110 110
T
5
0 26 100 100
T
6
0 10 85 85
T
7
0 11 94 94
T
8
0 14 105 105
Table 3: Applied model for WCET reconfiguration.
Tasks WCET New
WCET
Start
time
Finish
time
Deadline Scaling
factor
T
1
13.00 10.40 0.00 10.40 80.00 0.80
T
2
6.00 4.80 10.40 15.20 70.00 0.80
T
3
39.00 31.20 36.20 67.40 90.00 0.80
T
4
13.00 10.40 99.60 110.00 110.00 0.80
T
5
26.00 20.80 15.20 36.00 100.00 0.80
T
6
10.00 10.00 67.40 77.40 85.00 1.00
T
7
11.00 11.00 77.40 88.40 94.00 1.00
T
8
14.00 11.20 88.40 99.60 105.00 0.80
Table 4: New system configuration.
Tasks Release time WCET deadline period
T
1
0 73 80 80
T
2
0 65 70 70
T
3
0 83 90 90
T
4
0 103 110 110
T
5
0 96 100 100
T
6
0 75 85 85
T
7
0 81 94 94
T
8
0 100 105 105
we need to modify the scaling factor of the proces-
sor to find an optimal combination for the execution
of the corresponding tasks. Our model was applied to
the system recently presented to resolve the problem.
It computes for each task, the start time, the finish
time, the scaling factor of the processor , the previ-
ous deadline, the new deadline and the new WCET
after changing the scaling factors. The results are pre-
sented in table 6. Now let us study the case when no
available scaling factor can fulfill the needs. We as-
sume that a reconfiguration scenario has been applied
and the parameters of the tasks have been updated as
depicted in Table 4. Our model tries to adjust the
deadlines of tasks as a flexible solution to meet the
corresponding requested constraints with a minimum
energy consumption. The model was solved with the
CPLEX solver Version 12.0. The computational re-
sults are shown in table 5.
4.2 Heuristic Approach
In this section, we present another method based
on heuristic optimization approach that aim to find
Table 5: Applied model for WCET reconfiguration.
Tasks WCET Start
time
Finish
time
scaling
factor
Last
dead-
line
New
dead-
line
New
WCET
T
1
73.00 95.40 110.00 0.2 80.00 119.80 14.60
T
2
65.00 53.20 79.20 0.4 70.00 104.80 26.00
T
3
83.00 00.00 33.20 0.4 90.00 134.80 33.20
T
4
103.00 144.20 164.80 0.2 110.00 164.80 20.60
T
5
96.00 125.00 144.20 0.2 100.00 149.80 19.20
T
6
75.00 110.00 125.00 0.2 85.00 125.30 15.00
T
7
81.00 79.20 95.40 0.2 94.00 140.80 16.20
T
8
100.00 33.20 53.20 0.2 105.00 157.3 20.00
the appropriate scaling factor and meet a feasible
system if possible, if not, the heuristic tries to adjust
the deadlines of the tasks so that all the temporal
constraints are respected without any energy lost.
The processor has a set of available operating speeds
such that each task can be executed with its own
speed.
Definition1:
Let S be a system of n periodic tasks. We denote
by V = (V
i
)
1≤i≤n
the vector of speeds where: V
i
the
execution speed of the task i.
Definition2:
Let A and B be two vectors of size n. We denote
A ≤ B (reads A is smaller than B) if A
i
≤ B
i
∀i.
Proposition1 :
Let V and V
0
be two vectors of speeds such as V ≤ V
0
.
If S is feasible with V then it is necessarily feasible
with V
0
.
Proof :
Let A be the feasible schedule of S under V that meets
the following three constraints:
• Release time r
i
of the task i,
• The worst execution time c
i
of the task i,
• The deadline d
i
of the task i.
A is also feasible under V
0
because firstly, S under
V and S under V
0
have the same release times and
secondly, the execution times of the tasks of S in
V
0
are smaller than those in V. We assume that the
processor has m levels of speeds V
1
< V
2
< · · · < V
m
.
We denote by V
max
= (V
1
,...,V
m
) the maximum
execution speed of all the tasks.
Proposition2 :
If S is not feasible under V
max
, then S is not feasible
under any speed. We assume that all the tasks are
activated at the time t = 0 i.e r
i
= 0∀i.
The heuristic is based on the following idea: first, we
set a maximum speed for all the n tasks, if the system
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
96
is feasible (the CPU charge is equal or less than
1), we move to a lower speed and the operation is
repeated until the system becomes unfeasible. In this
case, the last value of the speed at which the system
is feasible is fixed for the first task and the procedure
is repeated with n − 1 remaining tasks. If the system
remains unfeasible (the CPU charge is greater than
1), the algorithm tries to increment the deadlines of
all the tasks and repeat the last process until reaching
the feasibility conditions.
Algorithm 1: Scheduling with deadline adjustment.
Inputs :
n number of tasks in the system
m Number of available levels of speed
Outputs :
A schedulable system
Begin :
repeat
V ← {V
1
,V
2
,. .. ,V
m
}: set of available speeds
T
init
← {T
1
,T
2
,. .. ,T
n
}: initial set of tasks
T ← T
init
Sort the tasks by increasing order of the priorities
i ← 1; j ← 1
while T is not empty do
repeat
Assign speed V
i
to all tasks in T
Compute the total charge U of the processor
Calculate the consumed energy E of the system
i ← i + 1
until (U > 1
if (i > 2) then
Assign V
i−2
to T
j
i ← i − 1
T ← T /{T
j
}
j ← j + 1
else
System can not be schedulable
T ←
/
0
end if
end while
Increase the deadline of all tasks
until (System is feasible)
End
Case Study
Let we have a processor with the following set of
scaling factor : {0.2,0.4,0.6,0.8,1} and the nominal
speed is equal to 1. The processor is charged to exe-
cute the following tasks (Table 6). The goal is to af-
fect the suitable processor speed to execute each task
in order to achieve a feasible system with low-power
energy consumption according to the proposed algo-
rithm. We compute in each iteration, the CPU charge
of the processor and the consumed energy. If the
available scaling factors of the processor cannot push
to a feasible system, the algorithm tries to change the
deadlines of the tasks as proposed solution.
Table 6: System configuration.
Tasks Release time WCET deadline period
T
1
0 73 80 80
T
2
0 65 70 70
T
3
0 83 90 90
T
4
0 103 110 110
T
5
0 96 100 100
T
6
0 75 85 85
T
7
0 81 94 94
T
8
0 100 105 105
Iteration1: We affect the maximum speed V
1
= 5 for all
the assumed tasks (scaling factor=0.2).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5 5 5 5 5 5 5 5
U
1
=
1
5
(
13
80
+
6
70
+
30
90
+
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
0.265 ≤ 1
I feasible system E
1
= 67.800mW
Iteration2: We affect the speed V
2
=
5
2
to all the
tasks : (scaling factor=0.4 ).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
2
5
2
5
2
5
2
5
2
5
2
5
2
5
2
U
2
=
2
5
(
13
80
+
6
70
+
30
90
+
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
0.530 ≤ 1 I feasible system E
2
= 16.950J
Iteration3: We affect the speed V
3
=
5
3
to all the
tasks: (scaling factor=0.6 ). V
3
=
5
3
for all task :
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
5
3
5
3
5
3
5
3
5
3
5
3
U
3
=
3
5
(
13
80
+
6
70
+
30
90
+
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
0.769 ≤ 1
I feasible system
E
3
= 7.533J
Iteration4: We affect the speed V
4
=
5
4
to all the
tasks: (scaling factor=0.6).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
4
5
4
5
4
4
2
5
4
5
4
5
4
5
4
U
4
=
4
5
(
13
80
+
6
70
+
30
90
+
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
1.061 ≥ 1
I unfeasible system, I we allocate the speedV
3
=
5
3
to T
1
E
4
= 4.237J
AdaptiveEmbeddedSystems-NewComposedTechnicalSolutionsforFeasibleLow-PowerandReal-timeFlexibleOS
Tasks
97
Iteration5: We affect the speed V
4
=
5
4
to the tasks
{T
2
,. .. ,T
8
}(scaling factor=0.8).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
4
5
4
4
2
5
4
5
4
5
4
5
4
U
5
=
3
5
13
80
+
4
5
(
6
70
+
30
90
+
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
1.029 ≥ 1
I unfeasible system, I we allocate speed V
3
=
5
3
to T
2
,
E
5
= 4.200J
Iteration6: We affect the speed V
4
=
5
4
to the tasks
{T
3
,. .. ,T
8
}(scaling factor=0.8).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
5
4
4
2
5
4
5
4
5
4
5
4
U
6
=
3
5
(
13
80
+
6
70
) +
4
5
(
30
90
+
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
1.0119 ≥ 1
I unfeasible system, I we affect the speed V
3
=
5
3
to T
3
,
E
6
= 4.207J
Iteration7: We the affect speed V
4
=
5
4
to the tasks
{T
4
,. .. ,T
8
}(scaling factor=0.8)
V
4
=
5
4
for tasks {T
4
,. .. ,T
8
}
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
5
3
4
2
5
4
5
4
5
4
5
4
U
7
=
3
5
(
13
80
+
6
70
+
30
90
) +
4
5
(
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
0.945 ≤ 1
I feasible system, E
7
= 4.243J
Iteration8: We affect the speed V
5
= 1 to the tasks
{T
4
,. .. ,T
8
}(scaling factor=1).
U
8
=
3
5
(
13
80
+
6
70
+
30
90
) + (
13
110
+
26
100
+
10
85
+
11
94
+
14
105
) =
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
1 1 1 1 1 1
1.095 ≥ 1
I system unfeasible, I we affects the speed V
4
=
5
4
to T
4
,
E
8
= 3.522J
Iteration9: We affect the speed V
5
= 1 to the tasks
{T
5
,. .. ,T
8
}(scaling factor=1).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
5
3
5
4
1 1 1 1
U
9
=
3
5
(
13
80
+
6
70
+
30
90
) +
5
4
13
110
+ (
26
100
+
10
85
+
11
94
+
14
105
) =
1.0713 ≥ 1
I system unfeasible, I we affect the speed V
4
=
5
4
to T
5
,
E
9
= 4.730J
Iteration10: We affect the speed V
5
= 1 to the tasks
{T
6
,. .. ,T
8
}(scaling factor=1).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
5
3
5
4
5
4
1 1 1
U
10
=
3
5
(
13
80
+
6
70
+
30
90
)+
5
4
(
13
110
+
26
100
)+(
10
85
+
11
94
+
14
105
) =
1.0193 ≥ 1
I unfeasible system, I we affect the speed V
4
=
5
4
to T
6
,
E
10
= 4.745J
Iteration11 : We affect the speed V
5
= 1 to the tasks
{T
7
,. .. ,T
8
}(scaling factor=1).
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
5
3
5
4
5
4
5
4
1 1
U
10
=
3
5
(
13
80
+
6
70
+
30
90
)+
5
4
(
13
110
+
26
100
+
10
85
)+(
11
94
+
14
105
) =
0.9958 ≤ 1
I feasible system, I we affect the speed V
5
= 1 to
T
7
andT
8
, E
10
= 4.710J. I Final solution:
T
1
T
2
T
3
T
4
T
5
T
6
T
7
T
8
5
3
5
3
5
3
5
4
5
4
5
4
1 1
Table 7: System configuration.
Tasks WCET deadline period
T
1
18 100 100
T
2
18 100 100
T
3
18 100 100
T
4
18 100 100
T
5
18 100 100
5 NUMERICAL RESULTS
We note that the implemented approaches in this pa-
per to solve the problem of non feasibility of a recon-
figurable real-time embedded system, provides more
efficient results compared to those in (Chetto and
Chetto, 1990; Dwivedi, 2012). Our models allow
to compute the scaling factor more than the execu-
tion sequence of tasks, the start and the finish time of
each task. Our approaches give also good results in
the case when no available scaling factor can fulfill
the system requirements. To compare our developed
approaches(Integer programming approaches IP and
Heuristic) to theme presented in (Chetto and Chetto,
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
98
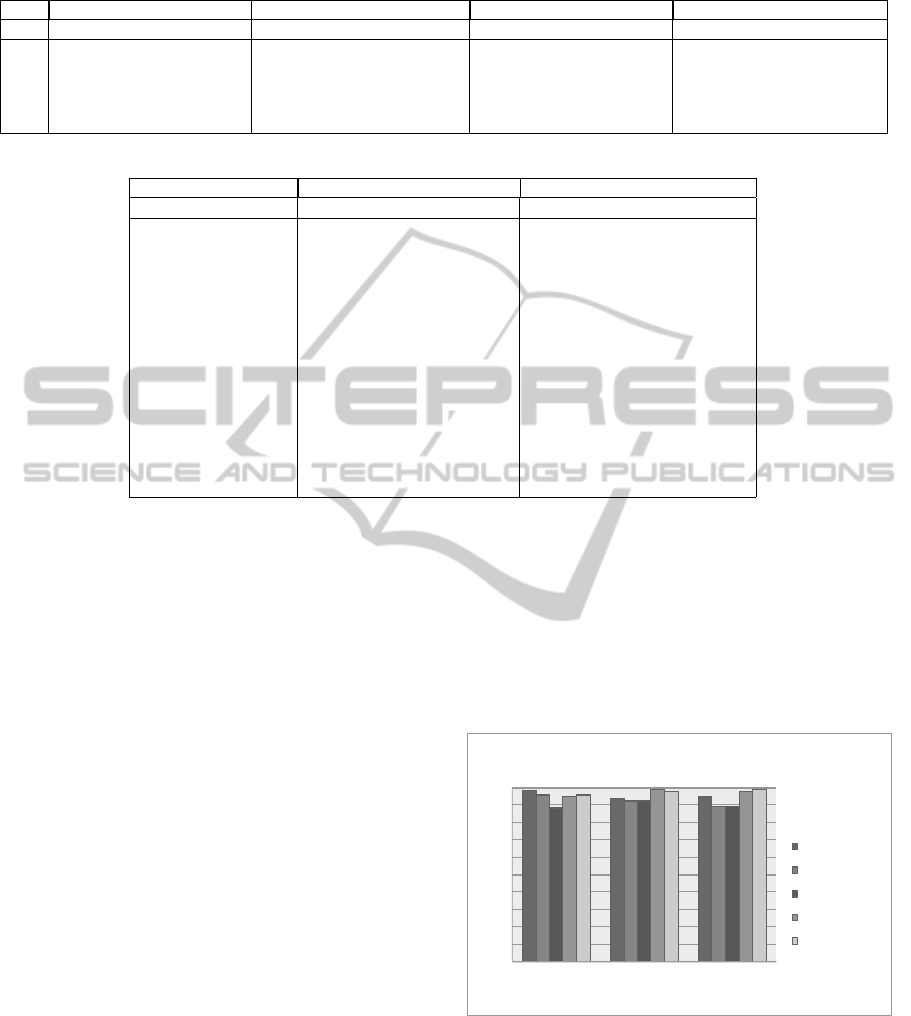
Table 8: Comparation between IP ,Heuristic and (Dwivedi, 2012) models for Deadline adjustment.
Last WCET New WCET Last Deadline New Deadline
Task IP & Heuristic & (Dwivedi, 2012) IP Heuristic (Dwivedi, 2012) IP & Heuristic & (Dwivedi, 2012) IP Heuristic (Dwivedi, 2012)
T
1
18 7.2 7.2 18 50 90 85 50
T
2
18 7.2 10.8 18 50 90 93 80
T
3
18 7.2 10.8 18 50 90 102 110
T
4
18 7.2 7.2 18 50 90 64 138
T
5
18 7.2 7.2 18 50 90 108 150
Table 9: Comparation between integer programming and Heuristic approach.
Heuristic approach Integer programming approach
basic system+added tasks Time Energy CPU charge Time Energy CPU charge
5+5 54ms 63.31 0,9853 2.77s 24.075 0,9776
15+5 68ms 121.78 0,8821 11.76s 43.74 0,9799
20+10 71ms 169.26 0,99703 34.11s 54.18 0,9991
30+10 56ms 257.72 0,9885 387.52s 63.19 0,9836
40+10 87ms 269.13 0,9867 1706.09s 153.04 0,9831
45+15 97ms 364.05 0,9714 1787.23s 168.17 0,9362
50+20 124ms 353.25 0,9809 1792.42s 167.11 0,8929
60+20 142ms 451.93 0,9794 1801.65s 163.68 0,9652
70+20 178ms 467.49 0,9744 1831.46s 239.24 0,9310
80+20 193ms 557.91 0,9827 1807.96s 315.62 0,9440
150+50 308ms 1181.43 0,9720 1973.39s 756,81 0,9915
250+50 742ms 1737.40 1 2051.71s 1244.15 0,8791
300+100 3s 2201.21 0,9251 2408.15s 1423.52 0,8636
1990; Dwivedi, 2012), we consider a period selection
with da deadline to be equal to the corresponding pe-
riod. The parameters of the task system are depicted
in Table 7: By applying our developed approaches to
this task system, we obtain the following results: Ta-
ble 8 shows that our approaches (IP and Heuristic)
give results better than works presented in (Dwivedi,
2012) according to the deadline adjustment. In fact,
the gap between the last deadlines and the new dead-
lines is less for our applied methods. In addition, our
approaches try to modify the WCET by acting on the
scaling factor of the processor. In our experimenta-
tion, we have also randomly generated instances with
10 to 400 jobs. The numerical results are depicted
in table 9. The first column shows the size of the
problem i.e the number of jobs. The sub-column la-
beled ”time” indicates the running time in millisec-
onds for each method. The sub-column labeled ”En-
ergy” gives the total energy consumption. The sub-
column labeled ”CPU charge” gives the total charge
of the processor. For example in Table 9 line 1, for
a system composed of 10 tasks(5 initial tasks with
other 5 added after a reconfiguration scenario) we ob-
tain 63.31J as a consumed energy and a CPU charge
equal to 0,9853 in a time of 54ms by using the heuris-
tic approach. According to the integer programming
approach, we obtain for the same OS tasks 24.075
as the consumed energy and a CPU charge equal to
0,9776 in a time of 2.77s. Table 9 shows that the
energy consumption result of the applied integer pro-
gram is lower than that of the heuristic. However for
the large size instances, the heuristic is much faster.
We conclude that the integer programming is more
efficient for the small instances. Moreover the two
approaches guarantee that all the constraints are re-
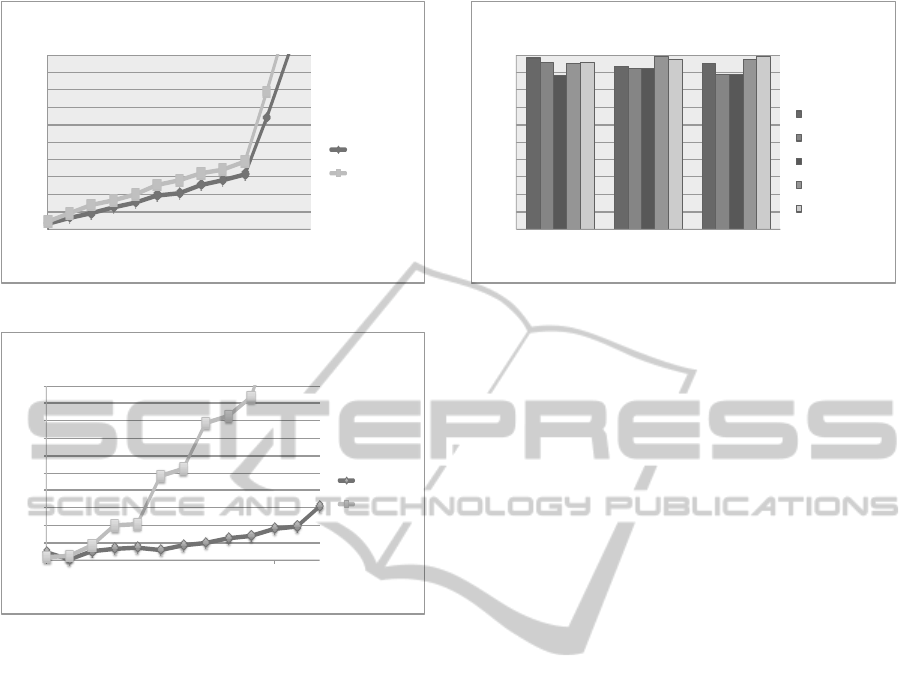
spected. Figures 1 and 2 present a graphic compa-
ration between the heuristic and the integer program-
ming in term of the CPU charge and the energy con-
sumption. According to the energy consumption, we
0"
0,1"
0,2"
0,3"
0,4"
0,5"
0,6"
0,7"
0,8"
0,9"
1"
5" 10" 15"
CPU$charge$
Size$of$problem$
Average$for$CPU$charge$$
integer"programming"*"
Heuris;c"method"*"
Constant"speed"step"
Descent"Cascade"
Simulated"annealing"
Figure 1: Comparation from CPU charge.
observe in Figure 2 that integer programming is more
effective as the number of instances increases because
it allows to explore more the search space of solutions
and can give a fairly optimal solution. We can observe
also that the heuristic is too fast than the integer pro-
gramming mainly for the large instances Figure 3. In
Figure 4, we compare the average CPU charge for the
AdaptiveEmbeddedSystems-NewComposedTechnicalSolutionsforFeasibleLow-PowerandReal-timeFlexibleOS
Tasks
99
0"
200"
400"
600"
800"
1000"
1200"
1400"
1600"
1800"
2000"
10" 20" 30" 40" 50" 60" 70" 80" 90" 100" 200" 300" 400"
Energy'
Size'of'problem'
Energy'consump4on'
Integer"programming"
Heuris:c"method"
Figure 2: Comparation from energy consumption.
!"
#!!"
$!!"
%!!"
&!!"
'!!"
(!!"
)!!"
*!!"
+!!"
#!!!"
#!" $!" %!" &!" '!" (!" )!" *!" +!" #!!" $!!" %!!" &!!"
Execu&on)&me))
Size)of)problem)
Execu&on)&me))
,-./0123"455/6437"
89:-;-/"5/6;/4<09;"
Figure 3: Comparation from energy consumption.
two proposed approaches and those presented as fol-
lows in (Jeannenot et al., 2004) on instances of 5 to
15 tasks. The solutions marked with ’*’ correspond
to our proposed approach in this paper, the rest refer
to (Jeannenot et al., 2004). The proposed models in
(Jeannenot et al., 2004) and(Chniter et al., 2014) try
to determine the correspondent scaling factors to en-
sure a feasible system, yet they they doesn’t take into
account the energy constraints, in addition, the pro-
posed model may not provide a solution in the case
where scaling factors do not allow a feasible system.
Our approaches try to exploit the flexibility of the pro-
cessor to meet the new deadlines of tasks and to min-
imize the energy cost because in our contribution ap-
proaches will work in a reconfigurable real-time em-
bedded system so that the feasibility constraint after
a reconfiguration scenario requires more resources of
processors.
6 CONCLUSIONS
In this paper, We have presented two combinato-
rial optimization approaches to solve the scheduling
0"
0,1"
0,2"
0,3"
0,4"
0,5"
0,6"
0,7"
0,8"
0,9"
1"
5" 10" 15"
CPU$charge$
Size$of$problem$
Average$for$CPU$charge$$
integer"programming"*"
Heuris;c"method"*"
Constant"speed"step"
Descent"Cascade"
Simulated"annealing"
Figure 4: Average CPU charge from each approach.
problem in a reconfigurable real-time embedded sys-
tem while minimizing the energy consumption. The
numerical results show that the integer programing
model provides more relevant results than the heuris-
tic approach. However, the heuristic is faster to exe-
cute large instances. Globally, the methods give more
chance to meet the timing requirements and overcome
the failure caused by the rejected tasks. As a fu-
ture work, our proposed models can be extended to
include other constraints such as multiprocessor sys-
tems and other criteria such as minimization of the
communication between the tasks and can include
other categories of tasks such as sporadic and aperi-
odic.
REFERENCES
Barr, M. (2007). ”embedded systems glossary”. Neutrino
Technical Library, 4(21).
Buttazzo, G. C., Lipari, G., and Abeni, L. (1998). Elastic
task model for adaptive rate control. RTSS, pages 286–
295.
Chantem, T., Hu, X. S., and Lemmon, M. D. (2009). Gen-
eralized elastic scheduling for real-time tasks. IEEE
Trans, Computers 58(4):480–495.
Chetto, H. and Chetto, M. (1990). A feasibility test for
scheduling tasks in a distributed hard real-time sys-
tem. APII, pages 239–25.
Chniter, H., Jarray, F., and Khalgui, M. (2014). Combinato-
rial approaches for low-power and real -time adaptive
reconfigurable embedded systems. International Con-
ference on Pervasive and Embedded Computing and
Communication Systems(PECCS).
cic¸ek, I. S. and Celik, C. (2011). Two meta-heuristics
for parallel processor scheduling with job splitting to
minimize total tardiness. Applied Mathematical Mod-
elling, 35(8).
Dalfard, V. M. and Mohammadi, G. (2012). Two meta-
heuristic algorithms for solving multi-objective flex-
ible job-shop scheduling with parallel processor and
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
100

maintenance constraints. Computers & Mathematics
with Applications, 64(6):2111–2117.
Dwivedi, S. P. (2012). Adaptive scheduling in real-time
systems through period adjustment. CoRR abs/1212,
(3502).
Fang, K.-T. and Lin, B. M. T. (2013). Parallel-
processor scheduling to minimize tardiness penalty
and power cost. Computers & Industrial Engineering,
64(1):224–234.
Fidanova, S. (2006). Simulated annealing for grid schedul-
ing problem. In JVA ’06: Proceedings of the IEEE
John Vincent Atanasoff 2006 International Sympo-
sium on Modern Computing, pages 41–45.
He, C., Zhu, X., Hui Guo, A. Q., and Jiang, J. (2012).
Rolling-horizon scheduling for energy constrained
distributed real-time embedded systems. Journal of
Systems and Software, 85(4):780–794.
Heath and Steve (2003). Embedded systems design. EDN
series for design engineers (2 ed.), Newnes. p. 2.
ISBN 978-0-7506-5546-0.
Heilmann, R. (2003). A branch-and-bound procedure for
the multi-mode resource-constrained project schedul-
ing problem with minimum and maximum time
lags. European Journal of Operational Research,
144(2):348–365.
Hladik, P.-E., Cambazard, H., Deplanche, A.-M., and
Jussien, N. (2008). Solving a real-time allocation
problem with constraint programming. J. Syst. Softw,
81(1):132–149.
Imran Rafiq Quadri, A. G., Boulet, P., Meftali, S., and
Dekeyser, J.-L. (2012). Expressing embedded sys-
tems configurations at high abstraction levels with uml
marte profile: Advantages, limitations and alterna-
tives. Journal of Systems Architecture - Embedded
Systems Design, 58(5):178–194.
Jeannenot, S., RICHARD, P., and RIDOUARD, F. (2004).
Ordonnancement temps r
´
eel avec profils variables de
consommation d’
´
energie. Real-Time Embedded Sys-
tems.
Letters, I. P., editor (1996). A note on scheduling on a sin-
gle processor with speed dependent on a number of
executed jobs, volume 297-300.
Liu, C. L. and Layland, J. W. (1973). Scheduling algo-
rithms for multiprogramming in a hard-real-time en-
vironment. J. ACM, 20(1):46–61.
Nossal, R. (1998). An evolutionary approach to multipro-
cessor scheduling of dependent tasks. In 1st Interna-
tional Workshop on Biologically Scheduling of Depen-
dent Tasks, Orlando, Florida, USA.
PARAIN, F., BANATRE, M., CABILIIC, G., HIGUERA,
T., ISSARNY, V., and LSEOT, J. (2000). Tenchiques
de r
´
eduction de la consommation dans les syst
`
emes
embarqu
´
es temps r
´
eel. INRIA Research report,
(3932).
Xu, R. (1993). Multiprocessor scheduling of processes with
release times, deadlines, precedence, and exclusion
relations. EEE Transactions, 19(2).
Ying, K.-C. and Cheng, H.-M. (2010). Dynamic parallel
processor scheduling with sequence-dependent setup
times using an iterated greedy heuristic. Expert Syst.
Appl, 37(4):2848–2852.
Zhu, Y. (2005). Dynamic voltage scaling with feedback edf
scheduling for real-time embedded systems. Master’s
thesis, North Carolina State University.
AdaptiveEmbeddedSystems-NewComposedTechnicalSolutionsforFeasibleLow-PowerandReal-timeFlexibleOS
Tasks
101
