
Rapidly Exploring Random Trees-based Initialization of MPC Technique
Designed for Formations of MAVs
Zden
ˇ
ek Kasl, Martin Saska and Libor P
ˇ
reu
ˇ
cil
Department of Cybernetics, Czech Technical University, Technick
´
a 2, 166 27 Prague, Czech Republic
Keywords:
Trajectory Planning, Model Predictive Control, Micro Aerial Vehicles, Rapidly Exploring Random Trees.
Abstract:
Motion planning techniques suited for initialization of Model Predictive Control based methodology applied
for complex maneuvering and stabilization of formations of Micro Aerial Vehicles are proposed in this paper.
Two approaches to initialization of the formation driving method will be described, experimentally verified,
evaluated and compared. The first proposed method is based on multiobjective optimization of the trajectory
guess obtained by a Rapidly Exploring Random Trees technique. It represents an easy to implement and robust
method suited for off-line initialization of the formation driving algorithm. The second proposed method is
based on sequential processing of parts of the obtained trajectory. This method is well scalable and thus
applicable in large workspaces with complex obstacles. In addition, the second method enables a significant
reduction of computational time as is shown by comparison of series of simulations in different environments.
1 INTRODUCTION
The group cooperation of autonomous robots became
an intensively studied topic in the past years. Most
recently, the research got focused on unmanned Mi-
cro Aerial Vehicles (MAVs), quadrotors, and their co-
operation. Control mechanisms and computational
power onboard of small-size MAVs enable their de-
ployment in teams with close mutual interaction.
The precisely stabilized MAV formations of compact
shapes are especially appealing for cooperative ma-
nipulation (Mellinger et al., 2013) carrying of objects
too heavy for single MAV (Maza et al., 2010) or co-
operative surveillance (Merino et al., 2007).
In this paper, we focus on a formation driving
mechanism suited for most of these applications.
The Model Predictive Control (MPC) based method
is ready to use in environments without precise exter-
nal localization system and in situations where relia-
bility and precision of global navigation satellite sys-
tems is insufficient. Our developed formation driv-
ing system (Saska et al., 2014) relies on precise rel-
ative localization of neighbouring MAVs using on-
board image processing system with simple monoc-
ular cameras (Krajn
´
ık et al., 2014). The proposed pa-
per brings a crucial contribution to the formation driv-
ing system, which enables its deployment in complex
large workspaces due to an appropriate initial guess
of the trajectory of the formation.
In most of the path tracking and formation sta-
bilization approaches, e.g. see (Abdessameud and
Tayebi, 2011; Chen et al., 2010) and references ref-
erences cited therein, it is supposed that the desired
trajectory followed by the formation is given as an in-
put of these methods. Our method goes beyond these
works, as it does not rely on following a given trajec-
tory and the global trajectory planning is directly inte-
grated into the formation control mechanism. There-
fore, the method can continuously respond to changes
in the MAVs vicinity, while keeping the cohesion of
the immediate control inputs with the directions of
movement of the formation in the future.
In addition, the proposed novel initialization of
this MPC concept enables to extend applicability of
the method into arbitrarily complex environments and
it significantly increases its robustness. The MPC
method relies on optimisation process that can be time
consuming if improperly initialized. In order to en-
able the trajectory optimization on-board, the opti-
mization process should be initialized with a feasible
initial trajectory.
The motion planning methods presented in this
paper are primarily suited for planning of the ini-
tial trajectory for MAV formations, but may be ef-
ficiently used also for planning of smooth trajecto-
ries of individual quadrotors, since MAV motion con-
straints are satisfied in the proposed algorithms. Both
of the proposed methods are based on the Rapidly
436
Kasl Z., Saska M. and P
ˇ
reu
ˇ
cil L..
Rapidly Exploring Random Trees-based Initialization of MPC Technique Designed for Formations of MAVs.
DOI: 10.5220/0005058504360443
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 436-443
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
exploring Random Trees (RRT) technique (LaValle,
1998). The RRT algorithm has been chosen for the
required motion planning due to its computational ef-
ficiency and possibility to integrate the motion con-
straints of MAVs as well as motion constraints of for-
mations of MAVs, which depend on possibly chang-
ing shape of the group. In addition, RRT provides
the output trajectory as a vector of control inputs.
Therefore, it can be directly employed as the initial-
ization of the MPC optimization process. In the pro-
posed methods, the optimality (mainly smoothness
and length) of the trajectory found by the RRT algo-
rithm is improved by consequent multiobjective op-
timization. This allows us to define the objectives,
which are similar to those used in the MPC forma-
tion driving method, already within the initialization.
The proposed approach to initialization of the MPC is
necessary for real deployment of the MAVs, where
the on-board available computational power is lim-
ited.
2 METHODS OVERVIEW
The methods proposed in this article are devised for
suitable initialization of the MPC-based approach de-
signed for guidance of formations of MAVs (Saska
et al., 2014), which is described in the first subsec-
tion 2.1. In subsection 2.2, the RRT algorithm is de-
scribed. The RRT is used for finding an initial guess
of the input trajectory, which is further optimized be-
fore using as the initialization vector for the MPC.
2.1 Model Predictive Control
Model Predictive Control is a control algorithm orig-
inally designed for industrial applications (Mayne
et al., 2000). The method became widely used in
robotic applications with increasing computational
power of available computers.
The MPC method relies on the mathematical
model of the controlled system. The control problem,
in this case integrated formation control and trajec-
tory planning, is coded as a vector of control inputs.
Employing MPC, a solution of the control problem is
found by optimization of the vector of control inputs,
which is evaluated based on the system response pre-
diction.
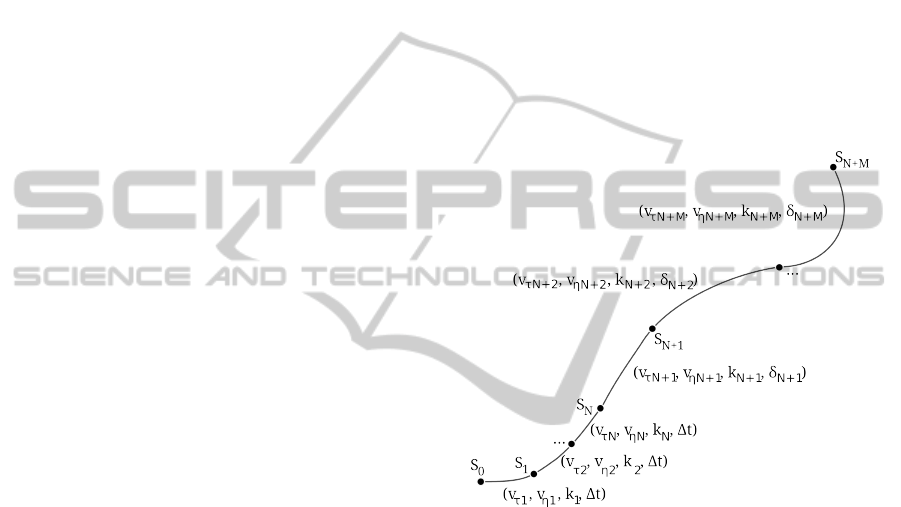
The optimization vector consists of N control in-
puts, each with constant duration ∆t, in original MPC
methods. It is forming so called prediction hori-
zon. We proposed an extension of the standard MPC
method for purposes of the trajectory planning in
(Saska et al., 2013). In the approach, the planning
horizon is extended by additional M control inputs
in order to be able to code the entire trajectory from
starting to goal state. Those M inputs have variable
time duration δ
i
, i = N + 1. . . N + M. Therefore, it is
possible to code long trajectories with small number
of control inputs. This setup enables the MPC to opti-
mize the entire trajectory, using the optimization vec-
tor in a form (u
1
, . . . , u
N
, u
N+1
, . . . , u
N+M
), shown in
Fig. 1. In the optimization vector, u
i
= (v
τi
, v
νi
, k
i
, t
i
)
is the i-th control input, v
τi
and v
νi
denote horizontal
and vertical velocity of the MAV, k
i
represents the cur-
vature of the given trajectory segment and t
i
∈
{
∆t, δ
i
}
is the duration of the segment.
More detailed description of the trajectory plan-
ning for formations of MAVs under MPC scheme can
be found in (Saska et al., 2014).
Figure 1: Trajectory represented as the optimization vector.
Each control input u
i
= (v
τi
, v
νi
, k
i
, t
i
), i = 1, . . . , N + M,
drives the MAV between consecutive states S
i−1
and S
i
.
2.2 Rapidly Exploring Random Trees
Rapidly Exploring Random Tree is a motion plan-
ning algorithm designed for search in high dimen-
sional spaces by filling them with a tree. The space–
filling tree is rooted in the starting state S
0
and it is
constructed in an iterative manner. The tree construc-
tion is terminated if |S
new
−S
goal
| < ε or if the number
of iterations exceeds the predefined limit. The con-
stant ε is user–defined precision of the planning. It
is convenient to define maximal number of iterations,
which will terminate the search in case that the de-
sired precision cannot be reached, e.g. when ε is too
small. Finally, the trajectory can be constructed from
parental references, starting from state S
N+M
which is
closest to the goal state. The detailed description of
the algorithm can be found in (LaValle, 1998).
The main advantage of this algorithm lays in its
RapidlyExploringRandomTrees-basedInitializationofMPCTechniqueDesignedforFormationsofMAVs
437

ability to accommodate kinematic and obstacle feasi-
bility constraints to the planning process. Thus guar-
anteeing the feasibility of all the trajectories contained
in the tree, e.g. when employed for nonholonomic or
kinodynamic motion planning. Moreover, the cov-
erage of the free space C
f ree
can be performed in
a short time even for environments with complex ob-
stacles. Since the control inputs u are added along
with the newly generated states, the outcome of RRT
planning is a trajectory, which is already coded as
an MPC optimization vector. However, it is not possi-
ble to guarantee optimality of the resulting trajectory,
due to randomized approach to the tree construction.
3 INITIALIZATION METHODS
The core of the designed MPC method is the opti-
mization process, which needs to be initialized with
a guess of the trajectory before the first MPC step.
The initial guess should be a feasible trajectory in
order to assure that the method will find a solution
which is also feasible. The RRT algorithm satisfies
the conditions for the MPC initialization. However
the resulting trajectories are not optimal and often
composed of many control inputs, which would sig-
nificantly slow down the trajectory planning process
under the MPC scheme. The initialization methods
proposed in this article take over the advantages of
the RRT algorithm and produce suitable initial trajec-
tories for the devised trajectory planning method.
Having the raw trajectory estimate as a vector of
control inputs from the RRT algorithm (see Fig. 1),
its optimality can be improved by optimization. Sub-
sequently, it is possible to reduce the number of con-
trol inputs by merging consequent control inputs with
similar values.
3.1 Trajectory Optimization
The optimization of the initial trajectory, which re-
sults in reduction of the amount of control inputs, re-
lies on properly designed objective function. It evalu-
ates the quality of the trajectory by user-defined crite-
ria in the optimization process. In order to assure that
the trajectory found by RRT algorithm is feasible for
the formation guidance, several constraints have to be
defined. Both, objective and constraint functions are
described in the following sub-subsections.
3.1.1 Objective Function
In the proposed objective function, each objective is
evaluated and the final value of the objective function
is denoted as a weighted sum of costs of the individual
objectives as
F =
6
∑
i=1
w
i
· F
i
. (1)
The weights w
i
are set by the user according to the im-
portance of the respective objectives. In this case,
the objectives that have to be minimized are:
Trajectory length function penalizes the length of
the trajectory as
F
1
=
N+M
∑
i=1
t
i
q
v
2
τi
+ v
2
νi
, (2)
where v
τi
and v
νi
are constant velocities in the i-th
control input of length t
i
.
Obstacle proximity function penalizes the trajecto-
ries that approach to obstacles closer than the safety
radius r
s
. The obstacle proximity function is deter-
mined as
F
2
=
N+M
∑
i=1
min
0,
d
i
− r
s
d
i
− r
a
2
, (3)
where d
i
is minimal distance from all obstacles over
the i-th interval of the trajectory and r
a
is critical ra-
dius. The value of the proximity function grows to
infinity for d
i
→ r
a
. The trajectory is considered in-
feasible if it approaches to any of the obstacles closer
than r
a
.
Input curvature penalty is employed with the aim
to prefer straight trajectories. This function is defined
as
F
3
=
N+M
∑
i=1
k
2
i
. (4)
Consecutive Input Difference is the key aspect
for achieving the simplification of the trajectory for
the initialization. The aim of this function is to ob-
tain trajectories having the consecutive control input
interval values as similar as possible. Thus they can
be merged together, making the trajectory more suit-
able for the initialization of the MPC method. This
function is defined for each of the control inputs as
follows:
F
4
=
N+M
∑
i=1
(v
τi
− ¯v
τ
)
2
, (5)
F
5
=
N+M
∑
i=1
(v
νi
− ¯v
ν
)
2
, (6)
F
6
=
N+M
∑
i=1
k
i
−
¯
k
2
, (7)
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
438

where ¯· denotes the mean value of the individual val-
ues over all N + M control inputs.
3.1.2 Constraint Functions
The above described fitness function ensures optimal-
ity of the resulting trajectory, but the feasibility of
the trajectory is not guaranteed. Therefore, it is re-
quired to apply the following set of constraints:
Motion constraints are applied to each of the con-
trol inputs u
i
in order to keep them in a feasible inter-
val. The bounds u
min
and u
max
are given by the con-
trolled vehicle. The control inputs are limited as
u
j,min
< u
j,i
< u
j,max
, i = 1 . . . N + M, (8)
where j = 1 . . . 4 denotes the individual control input
(v
τ
, v
ν
, k, t) being evaluated and its respective limits.
Minimal obstacle distance ensures that the trajec-
tory will not lead to a collision with obstacles. It
also guarantees that the denominator in (3) is always
greater than zero. The constraint is defined as
r
a
− d
i
< 0, i = 1. . . N + M, (9)
where r
a
is the minimal allowed distance to obstacles
and d
i
is the minimal distance to all obstacles of the i-
th part of the trajectory.
Final position constraint assures that the goal re-
gion is reached if the trajectory is followed. The goal
region is defined by its central point X
g
and radius r
g
:
|X
g
− X
N+M
| < r
g
. (10)
Vector X
N+M
denotes the last point of the followed
trajectory.
If the sequential trajectory processing is employed
(see sec. 3.4), an additional constraint
|γ
0
− γ| < ε
γ
(11)
has to be considered. In the constraint, γ is the yaw
Euler angle, γ
0
is the desired yaw Euler angle and ε
γ
is
the user–defined tolerance of the final angle.
3.2 Trajectory Simplification
The definition of the consecutive input difference ob-
jective function ensures that the consecutive control
inputs defining the trajectory will be as similar as pos-
sible after the optimization. Subsequently, the simi-
lar successive control inputs are merged into one with
adjusted parameters and prolonged time duration. It
leads to shortening the length of the optimization vec-
tor and reducing the time needed for optimization
of the trajectory. Such an initial trajectory will im-
prove the time needed for finding the optimal solution
by the MPC method, which is the main purpose of
the proposed methods.
Having two consecutive control inputs u
1
=
(v
τ1
, v
ν1
, k
1
, t
1
) and u
2
= (v
τ2
, v
ν2
, k
2
, t
2
), it is pos-
sible to merge them into one input, if they fulfil three
conditions. The first two conditions concern the ve-
locities of the consecutive control inputs:
|v
τ1
− v
τ2
| < ε
vτ
(12)
and
|v
ν1
− v
ν2
| < ε
vν
, (13)
where ε
vτ
and ε
vν
denote the user-defined velocity
tolerance. This tolerance has to be defined with re-
spect to the difference of the final state, which may
be caused by merging of the two consecutive con-
trol intervals. The difference is proportional to the re-
spective tolerance and to the duration of the interval.
In this case, the difference in horizontal or vertical
movement may be compensated by shortening or pro-
longing the duration of the interval and by appropri-
ate adjusting the average velocity values. However,
an extra attention has to be paid to respecting the lim-
its u
min
and u
max
.
The third condition is defined as
|k
1
− k
2
| < ε
k
. (14)
The analysis of influence of curvature difference be-
tween two consecutive segments to the final state after
their merging is not as straightforward as in the pre-
ceding case. The worst case scenario is depicted in
Fig. 2. Applying the control input u
1
moves the MAV
to γ = 180
◦
along a circular trajectory and applying
the control input u
2
moves it by another 180
◦
along
a circular trajectory with different curvature. The po-
sition error is then equal to double of the difference
∆r =
k
2
− k
1
k
1
k
2
. (15)
In this case, the tolerance should be determined
with respect to the biggest allowed curvature. It is
shorter trajectory to travel 180
◦
around a circular tra-
jectory with maximal curvature and therefore it is
more likely that the worst case scenario will occur.
With decreasing curvature, the crossing point moves
towards 90
◦
(see Fig. 3) and 45
◦
(see Fig. 4) and
the resulting difference becomes smaller than the dou-
ble of radius difference.
With all merging criteria defined, it is possible
to loop through the trajectory and merge together
the consecutive control intervals that fulfil the con-
ditions of similarity. The control inputs applied on
RapidlyExploringRandomTrees-basedInitializationofMPCTechniqueDesignedforFormationsofMAVs
439
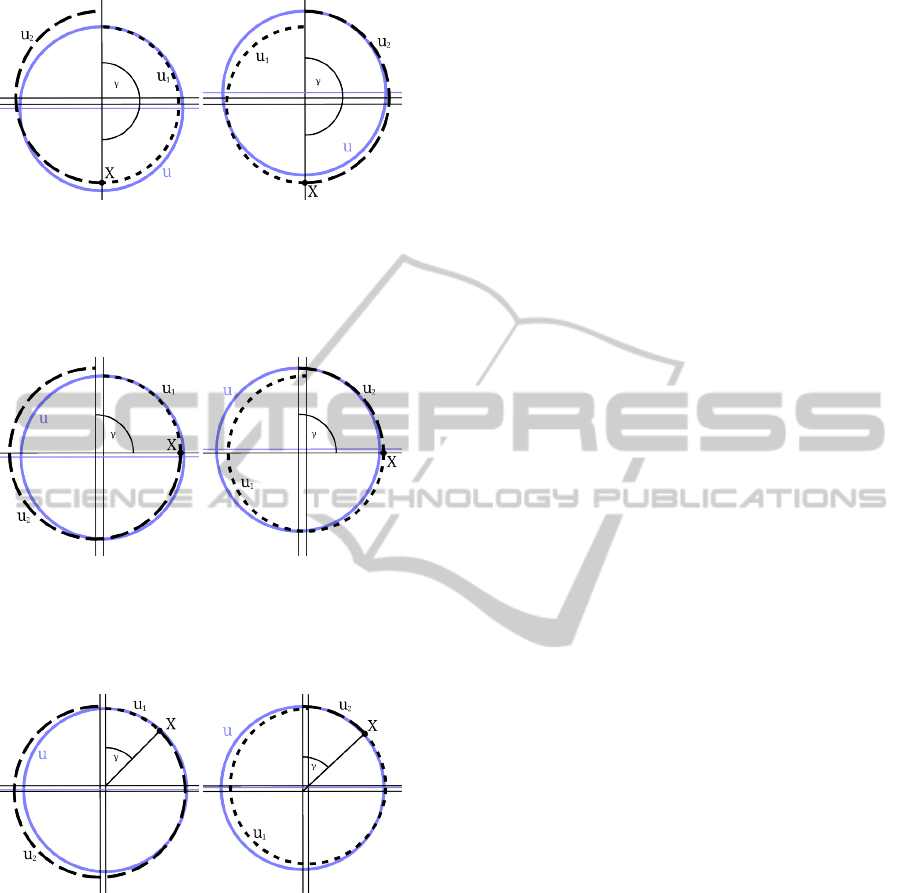
(a) u
1
to u
2
transition (b) u
2
to u
1
transition
Figure 2: The worst case scenario occurs when merging
two circular trajectories that cross at γ = 180
◦
. The dif-
ference in the final state is equal to the radius difference
∆r. The lighter color denotes the average control input u,
replacing control inputs u
1
and u
2
.
(a) u
1
to u
2
transition (b) u
2
to u
1
transition
Figure 3: Crossing at γ = 90
◦
. The difference in the final
state is smaller than the radius difference ∆r. The lighter
color denotes the average control input u, replacing control
inputs u
1
and u
2
.
(a) u
1
to u
2
transition (b) u
2
to u
1
transition
Figure 4: Crossing at γ = 45
◦
and less, which is the scenario
most likely to occur for control inputs with small curvatures.
The difference in the final state is also smaller than the ra-
dius difference ∆r. The lighter color denotes the average
control input u, replacing control inputs u
1
and u
2
.
the merged consecutive intervals are obtained as fol-
lows:
u =
¯v
τ
, ¯v
ν
,
¯
k, t
1
+t
2
, (16)
where the operation ¯· denotes the average value of
the two inputs u
1
and u
2
.
3.3 Naive Approach
This approach to a suitable initialization of the MPC
method is an intuitive employment of the de-
scribed optimization approach and the proposed tra-
jectory simplification method to a trajectory found by
the RRT algorithm. The main idea is that the whole
trajectory obtained from the RRT algorithm is simpli-
fied together, using the previously described methods.
The trajectory found by the RRT algorithm is
composed of many control inputs and it is usually far
from the optimal result. The approach to construc-
tion of the space-filling tree suggests that the trajec-
tory will often change direction and thus it is diffi-
cult to simplify. This is the reason why the trajec-
tory found by the RRT is pre-optimized, using the ap-
proach described in section 3.1. The objective func-
tion of the optimization process was designed with
the aim of unification of the consecutive intervals of
the trajectory. Therefore, it is possible to employ
the trajectory simplification method described in sec-
tion 3.2 and merge all control inputs with similar val-
ues together. In a general case, the simplified trajec-
tory is optimal with respect to the objective function
defined in section 3.1 and it is described by less con-
trol inputs. Thus it is suitable for the initialization of
the MPC.
The main weakness of this approach is that it suf-
fers form the length of the optimization vector gener-
ated by the RRT algorithm. In some cases, the opti-
mization may take minutes to complete. This is why
the naive approach is suitable merely for applications
that allow offline pre-calculation of the initial trajec-
tory with no time constraints.
3.4 Sequential Processing
The sequential processing approach exploits the fact
that the time consumed by the optimization grows as
O(n
2
), where n is the number of control inputs de-
scribing the trajectory, i.e. n = |u| · (N + M). There-
fore, piecewise processing of the trajectory speeds up
the optimization process.
In order to preserve start and end state of
the whole trajectory, start and end states of each of
the processed parts of the trajectory should be fixed.
Moreover, the yaw Euler angle γ in each start and
end configuration has to be fixed as well, in order to
enable putting the trajectory smoothly back together.
The optimization of the pieces of the trajectory is im-
plemented according to section 3.1 and the conse-
quent simplification is performed as described in sec-
tion 3.2.
Once the simplification of smaller pieces of
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
440
the trajectory is complete, the overall optimization has
to be performed in order to improve the trajectory to
its final state. Subsequently, the simplification is done
producing the final trajectory.
In some cases, the piecewise reduction of the tra-
jectory does not affect the result and the number of
control inputs remains the same. Then, it is effi-
cient to replan the RRT trajectory estimate. The prob-
ability of occurrence of this problem can be re-
duced by planning several trajectories, exploiting
the time efficiency of the RRT algorithm in compari-
son with the time demanding trajectory optimization
in the post-processing phase. From the obtained set,
the best candidate trajectory can be selected e.g. by
evaluating with subset of objectives defined in opti-
mization objective function in section 3.1.
If a multi-core processor is available, it is possible
to run this method as a parallel processing. Running
the optimization of the parts of the trajectory in paral-
lel threads fully exploit the benefits of the processor.
4 EXPERIMENTS
The experimental verification of the properties of
the proposed methods is described in this sec-
tion. The RRT algorithm uses kinematic model
described in (Saska et al., 2014) employing con-
straints shown in tab. 1. Each state S
new
is se-
lected from a set of candidate states that are gener-
ated by applying a set of control inputs U. The set
U contains combinations of control inputs with
horizontal velocity v
τ
= 0.6 m · s
−1
, normal veloci-
ties v
ν
∈
{
−0.3, 0.0, 0.3
}
m · s
−1
and curvatures k ∈
{
−1.0, 0.0, 1.0
}
m
−1
. The duration of the control
inputs is reduced with increasing number of itera-
tions, as t = 2.5 s for 1 < i < 2000; t = 0.5 s for
2001 < i < 5000 and t = 0.1 s for 5001 < i < 10000.
The decreasing length of control inputs helps to main-
tain rapid coverage of the free space and to reduce
size of the tree. Moreover, the decreasing length of
the control inputs helps to find trajectories that are
composed of fewer–longer control inputs, rather than
more shorter control inputs. A counterexample with
fixed control input duration t = 0.1 s is also presented.
Maximal number of iterations of the RRT algorithm is
set to m
iter
= 10000.
The choice of the duration of the control input in-
fluences the level of detail of planning. Therefore, it is
crucial to pay attention to its choice if the algorithm
is used for planning in an environment with narrow
passages with respect to the formation size.
The trajectory merging constants were set accord-
ing to section 3.2 as follows: ε
vτ
= 0.01 m · s
−1
; ε
vν
=
Table 1: Kinematic constraints of an MAV.
v
τ
m · s
−1
v
ν
m · s
−1
k
m
−1
t [s]
u
min
0 −0.3 −1 0
u
max
0.6 0.3 1 10
0.01m · s
−1
and ε
k
= 0.01m
−1
.
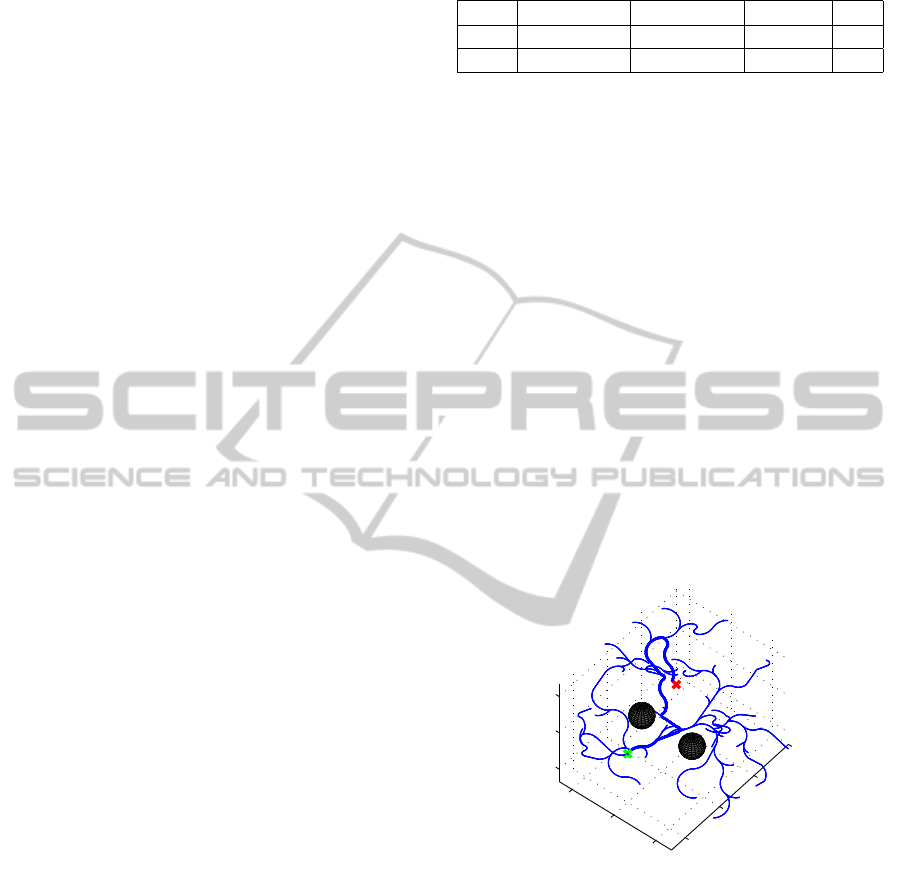
4.1 Tree and Trajectory
An example of the space-filling tree generated by
the RRT algorithm is shown in Fig. 5. The bold line
denotes the resulting trajectory found by the algo-
rithm.
As you may notice, the trajectory does not end in
the desired goal point exactly, which is fine for pur-
poses of testing. In real deployment, if the distance
between the final point of the trajectory and the de-
sired goal point is higher than a predefined threshold,
the trajectory has to be replanned.
The time efficiency of the RRT algorithm can be
exploited by planning several trajectories and taking
the most suitable one for the optimization. For ex-
ample, a number of control inputs, final distance to
goal point, existence of a loop within the trajectory or
length of the trajectory can be taken as a criterion.
0
5
10
15
−5
0
5
−5
0
5
x[m]
y[m]
z[m]
Figure 5: Space-filling tree, with resulting trajectory (bold).
4.2 Trajectory Optimization
The comparison of the raw trajectory obtained from
the RRT algorithm and the optimization result is
shown in Fig. 6. The initial trajectory (dark) was
coded using 16 control inputs. The number of con-
trol inputs was reduced to 10 (light).
It may happen that the trajectory found by
the RRT algorithm contains a loop. This situation is
depicted in the horizontal plane projection in Fig. 7.
Again, the dark trajectory is the raw trajectory ob-
tained from the RRT algorithm and the light one is
RapidlyExploringRandomTrees-basedInitializationofMPCTechniqueDesignedforFormationsofMAVs
441
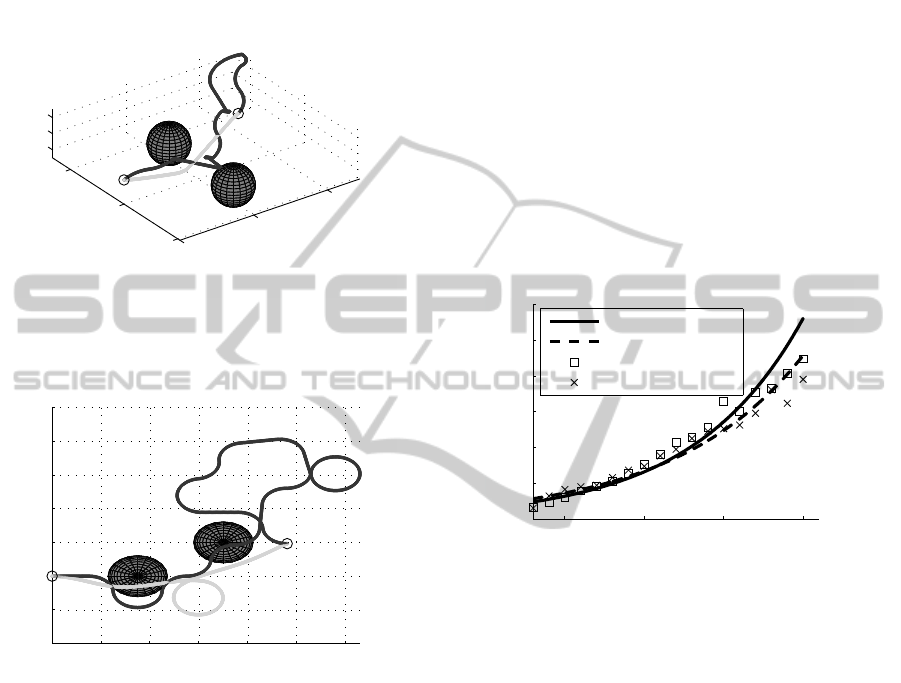
the result of the optimization process. The control in-
put reduction is not so significant as in the previous
case due to the occurrence of the loop. Here, 25 orig-
inal control inputs were reduced to 22. Therefore, it
is important to detect and reject loopy trajectories.
0
5
10
−5
0
5
−1
0
1
x[m]
y[m]
z[m]
Figure 6: Comparison of trajectory generated by the RRT
algorithm (dark) with trajectory after optimization (light).
The circles denote start and end points of both trajectories.
0 2 4 6 8 10 12
−4
−2
0
2
4
6
8
10
x[m]
y[m]
Figure 7: Example of trajectory containing loop before op-
timization (dark) and after optimization (light). The black
circles denote start and end points of the trajectory.
4.3 Optimization Methods Comparison
The presented methods are compared concerning
the time consumption in this sub-section. The first
two experiments were performed in obstacle-free en-
vironment and in an environment with obstacles.
The third experiment shows properties of presented
algorithms when treating long trajectories (over 100
control inputs). This last scenario may happen if a de-
tailed space coverage by the RRT algorithm is re-
quired, e.g. in a narrow passage. In all of the fig-
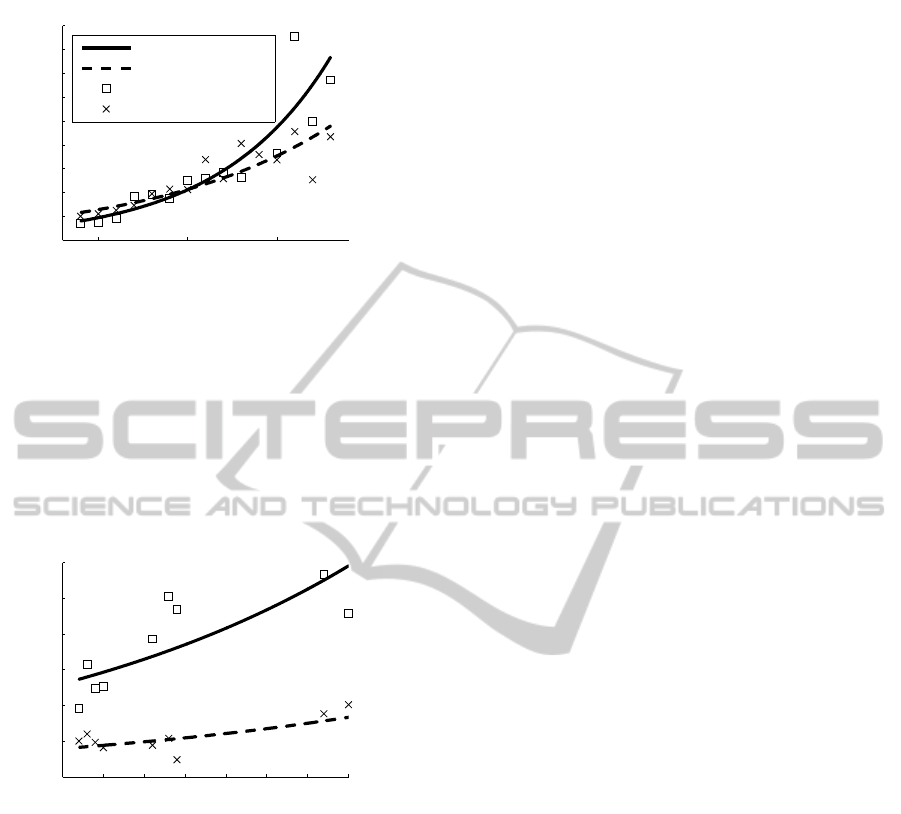
ures presented in this subsection, the measured data
(rectangular and cross marks) were interpolated with
an exponential function in order to illustrate the rate
of time consumption increase.
4.3.1 Obstacle–free Environment
In this experiment, each of the proposed methods
was run 1000 times with fixed start configuration and
varying goal. All the time measurements were col-
lected and the graph of average time consumption is
shown in Fig. 8. The time consumption t is shown
with respect to the number of control inputs n describ-
ing the trajectory. The length of the trajectory part for
sequential processing was set to 4 control inputs.
The graph shows that the average time con-
sumption in the obstacle-free environment is simi-
lar. The sequential method time consumption is influ-
enced by the choice of number of control inputs for
sub-optimization. The graph shows, that the sequen-
tial method finds solution faster than the naive method
for trajectories with more control inputs.
10 15 20 25
0
1
2
3
4
5
6
x 10
4
n [−]
t [ms]
Naive method
Sequential method
Naive−data
Sequential−data
Figure 8: Comparison of performance of the proposed
methods in obstacle-free environment. The variable n de-
notes the number of control inputs describing the trajectory.
4.3.2 Environment with Obstacles
The sequential processing method was used with
the same setup as in the preceding experiment. An en-
vironment with 52 spherical obstacles was used for
verification of the algorithm performance. Both meth-
ods were run 100 times and the time measurements
were collected. The comparison in Fig. 9 shows
that the maximal time consumption of the sequen-
tial method is significantly smaller in comparison to
the naive method.
4.3.3 Fixed RRT Control Input Duration
In case that a more detailed coverage of the free
space is required, the tree will produce much longer
trajectory than in the preceding two scenarios, i.e.
the trajectory is composed of over 100 control in-
puts. Both methods were run 100 times in this experi-
ment in an environment with four spherical obstacles.
The length of sub-optimization part of trajectory was
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
442
10 15 20
0
1
2
3
4
5
6
7
8
9
x 10
5
n [−]
t [ms]
Naive method
Sequential method
Naive−data
Sequential−data
Figure 9: Comparison of performance of the proposed
methods in environment with obstacles. The variable n de-
notes the number of control inputs describing the trajectory.
set to 10 control inputs. The comparison of average
time consumption is shown in Fig. 10.
The graph shows that the time consumption of
the naive method rapidly grows with increasing num-
ber of control inputs. The increase of time consump-
tion of the sequential method is more gradual due to
the reduction of the number of control inputs.
165 170 175 180 185 190 195 200
0
1
2
3
4
5
6
x 10
6
n [−]
t [ms]
Figure 10: Comparison of performance of the proposed
methods when planning long trajectories. The legend re-
mains the same as in previous figures. The variable n de-
notes the number of control inputs describing the trajectory.
5 CONCLUSIONS
The motion planning methods presented in this paper
respect kinematic constraints of the particular MAVs
as well as the entire MAV formation. The resulting
trajectory is coded as a vector of control inputs, i.e.
in the form required by the MPC method. There-
fore, these methods are suitable for initial trajectory
planning for formations of MAVs. The proposed ap-
proaches increase the time efficiency of the method.
When employing the methods in a complex en-
vironment, an attention has to be paid to the choice
of the merging constants as well as to the setup of
the RRT algorithm. The experimental verification
showed that the sequential processing method is more
efficient, compared to the naive method. If the tra-
jectory guess for the method is selected from a set
of trajectories computed using the RRT algorithm,
the time required to find a solution can be significantly
reduced.
ACKNOWLEDGEMENTS
This work was supported by internal CTU grant no.
SGS14/073/OHK3/1T/13, GA
ˇ
CR postdoc grant no.
P103-12/P756 and M
ˇ
SMT grant under Kontakt II no.
LH11053.
REFERENCES
Abdessameud, A. and Tayebi, A. (2011). Formation control
of vtol unmanned aerial vehicles with communication
delays. Automatica, 47(11):2383 – 2394.
Chen, J., Sun, D., Yang, J., and Chen, H. (2010).
Leader-follower formation control of multiple non-
holonomic mobile robots incorporating a receding-
horizon scheme. Int. Journal Robotic Research,
29:727–747.
Krajn
´
ık, T., Nitsche, M., Faigl, J., Van
ˇ
ek, P., Martin, S.,
P
ˇ
reu
ˇ
cil, L., Duckett, T., and Mejail, M. (2014). A
practical multirobot localization system. Journal of
Intelligent and Robotic Systems, pages 1–24.
LaValle, S. M. (1998). Rapidly-exploring random trees a
new tool for path planning.
Mayne, D. Q., Rawlings, J. B., Rao, C. V., and Scokaert,
P. O. (2000). Constrained model predictive control:
Stability and optimality. Automatica, 36(6):789–814.
Maza, I., Kondak, K., Bernard, M., and Ollero, A. (2010).
Multi-uav cooperation and control for load transporta-
tion and deployment. Journal of Intelligent and
Robotic Systems, 57(1-4):417–449.
Mellinger, D., Shomin, M., Michael, N., and Kumar, V.
(2013). Cooperative grasping and transport using mul-
tiple quadrotors. In Distributed autonomous robotic
systems, pages 545–558. Springer.
Merino, L., Caballero, F., Ferruz, J., Wiklund, J., Forss
´
en,
P.-E., and Ollero, A. (2007). Multi-uav cooperative
perception techniques. In Multiple Heterogeneous
Unmanned Aerial Vehicles, pages 67–110. Springer.
Saska, M., Kasl, Z., and P
ˇ
reu
ˇ
cil, L. (2014). Motion plan-
ning and control of formations of micro unmanned
aerial vehicles. In 19th World Congress of IFAC. To
be published.
Saska, M., Mej
´
ıa, J., Stipanovi
ˇ
c, D. M., Von
´
asek, V.,
Schilling, K., and P
ˇ
reu
ˇ
cil, L. (2013). Control and
navigation in manoeuvres of formations of unmanned
mobile vehicles. European Journal of Control,
19(2):157–171.
RapidlyExploringRandomTrees-basedInitializationofMPCTechniqueDesignedforFormationsofMAVs
443
