
Nonlinear Feedback Control and Artificial Intelligence Computational
Methods applied to a Dissipative Dynamic Contact Problem
Daniela Danciu
1
, Andaluzia Cristina Matei
2
, Sorin Micu
2,3
and Ionel Rovent¸a
2
1
Department of Automation, Electronics and Mechatronics, University of Craiova, 200585, Craiova, Romania
2
Department of Mathematics, University of Craiova, 200585, Craiova, Romania
3
Institute of Mathematical Statistics and Applied Mathematics, 70700, Bucharest, Romania
Keywords:
Hyperbolic partial differential equation, Contact problem, Method of Lines, Galerkin method, Cellular Neural
Networks, Computational methods, Neuromathematics.
Abstract:
In this paper we consider a vibrational percussion system described by a one-dimensional hyperbolic partial
differential equation with boundary dissipation at one extremity and a normal compliance contact condition at
the other extremity. Firstly, we obtain the mathematical model using the Calculus of variations and we prove
the existence of weak solutions. Secondly, we focus on the numerical approximation of solutions by using a
neuromathematics approach – a well-structured numerical technique which combines a specific approach of
Method of Lines with the paradigm of Cellular Neural Networks. Our technique ensures from the beginning
the requirements for convergence and stability preservation of the initial problem and, exploiting the local con-
nectivity of the approximating system, leads to a low computational effort. A comprehensive set of numerical
simulations, considering both contact and non-contact cases, ends the contribution.
1 INTRODUCTION
The purpose of the paper is twofold. Firstly, we
verify, on a new mathematical model from Con-
tact Mechanics, a well-structured technique for solv-
ing hyperbolic partial differential equations (hPDEs),
by using Method of Lines (MoL) combined with
the features and flexibility of Cellular Neural Net-
works (CNNs) – nonlinear processing devices having
a large amount of applications from image processing
to numerical solving of differential equations. This
is a neuromathematics approach, i.e., according to
(Galushkin, 2010), an approach used for solving both
non-formalized (or weakly formalized) and formal-
ized problems using the neural networks paradigm.
Our approach addresses the formalized-type prob-
lems where the structure of the neural network is
based only on the “natural parallelism” of the problem
itself and does not need a learning process based on
experimental data. We have already successfully ap-
plied our technique for the overhead crane with non-
homogeneous cable (Danciu, 2013a), the torsional
stick slip oscillations in oilwell drillstrings (Danciu,
2013b) and the controlled flexible arm of an ocean
vessel riser (Danciu and R˘asvan, 2014).
It is assumed that our method is even more effec-
tive for high dimensions, where the well-organized
technique may have the following advantages: a) ac-
curacy (for example, fewer rounding errors), b) ro-
bustness to ill numerical conditioning and c) use of
existing high-performance software for solving ordi-
nary differential equations (ODEs).
Secondly, we study a particular robotic system of
type vibrational percussion system, which is mod-
elled by a one-dimensional hPDE with a dissipative
boundary condition at one extremity and a contact
nonlinear phenomenon at the other extremity. The
study concerns mathematical modelling of the sys-
tem, existence of the weak solutions for the hPDE
problem, numerical approximation and asymptotic
behavior. The problem can be viewed as a structure
with nonlinear feedback and reference signal. From
the mathematical point of view, the main difficulties
reside in the nonlinearity of the problem, the lack of a
regularization effect of solutions, possibly the effects
of discretization on the dissipative mechanism.
The rest of paper is organized as follows. Sec-
tion 2 deals with mathematical modelling of the sys-
tem via Calculus of variation methods. Section 3 fo-
cuses on the study of the existence of weak solutions
for the hPDE problem, whereas Section 4 is devoted
to numerical approximation of the solution. We im-
528
Danciu D., Matei A., Micu S. and Roven¸ta I..
Nonlinear Feedback Control and Artificial Intelligence Computational Methods applied to a Dissipative Dynamic Contact Problem.
DOI: 10.5220/0005055005280539
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 528-539
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

g(t)
x
f(t,x)
L
l
0
k
Figure 1: Elastic rod with boundary conditions: 1) a dash-
pot and time-varying external force at x = 0 and 2) a de-
formable obstacle with normal compliance and initial gap
at x = L.
plement the approximating system of ODEs by using
the CNN paradigm in order to exploit the regularity,
parallelism and matrix sparsity of the new problem.
The section provides a comprehensive set of numer-
ical simulations, considering both contact and non-
contact cases. Concluding remarks end the paper.
2 THE MATHEMATICAL MODEL
We consider an elastic rod with a dashpot attached to
the left end x = 0. At the opposite extremity x = L the
rod can come in contact with a deformable obstacle
with normal compliance of stiffness
1
ε
, ε > 0. The ob-
stacle is located at a distance l (often called the initial
gap) to the right of the point x = L. The rod is sub-
jected to a body force of density f in the x-direction
and to an external force g(t) which acts at the extrem-
ity x = 0 as shown in Figure 1
In order to obtain the mathematical model, we use
the Calculus of variation methods. For our case, the
kinetic E
k
and the potential E
p
energies are
E
k
(t) =
1
2
Z
L
0
ρ(x)A(x) ˙u
2
(t,x)dx
E
p
(t) =
1
2
Z
L
0
A(x)σ
2
(t,x)dx.
(1)
Herein, u represents the longitudinal displacement;
the internal longitudinal force in the rod is given by
σ(x) = Eu
x
(t,x) where E > 0 represents the Young
modulus of the material; ρ is the density of the ma-
terial; A is the cross-sectional area of the rod. In (1)
and in the sequel ˙u denotes the first time derivative
of u and u
x
denotes the first derivative with respect to
space variable x. Taking into consideration the dissi-
pative forces due to viscous friction at both extrem-
ities of the rod h
0
(t), h
1
(t), the external force g(t)
and the axial force of density along the rod f(t,x),
the work W
m
done by these forces is
W
m
(t) = h
0
(t)u(t, 0) + g(t)u(t, 0) + h
1
(t)(u(t,L) −l)
+
Z
1
0
f(t, x)u(t, x)dx.
(2)
Consider the functional associated to the Hamilton
variational principle
I(t
1
,t
2
) =
Z
t
2
t
1
(E
k
(t) −E
p
(t) +W
m
(t))dt (3)
with arbitrary t
1
, t
2
and introduce the standard Euler-
Lagrange variations
u(t,x) = ¯u(t, x) + ςµ(t,x) (4)
where ¯u(t,x) is the basic trajectory and ςµ(t,x) is the
variation of ¯u(t,x). The condition for the functional
(3) to be minimal along the trajectories of the system
will give, after some lengthy but straightforward ma-
nipulations, the following equations
−ρ(x)A(x)
¨
¯u+ (A(x)E ¯u
x
)
x
+ f(t,x) = 0
A(0)E ¯u
x
(t,0) + h
0
(t) + g(t) = 0
−A(L)E ¯u
x
(t,L) + h
1
(t) = 0
(5)
At x = L we shall introduce the contact condition, i.e.
the last equation in (5) will be replaced by
Eu
x
(t,L) = −p(u(t,L) −l), t ∈ (0, T), (6)
with function p(·), having the measure unit of stress,
described below in this section. Considering the dis-
sipative force due to the damper, at x = 0, h
0
(t) =
−ku
t
(t,0) to be in the opposite direction of motion
and, the case of a uniform rod, the equations (5) – (6)
become (with an abuse of notation u := ¯u)
ρ(x)A(x) ¨u(t, x) −EA(x)u
xx
(t,x) = f(t,x)
A(x)Eu
x
(t,0) −k ˙u(t,0) = −g(t)
Eu
x
(t,L) = −p(u(t,L) −l)
(7)
Considering A(x) = A > 0 and ρ(x) = ρ > 0, the
mechanical model leads us to the following boundary
value problem with initial data
ρ ¨u(t,x) −E u
xx
(t,x) =
1
A
f(t, x) x ∈ (0, L),
t ∈ (0, T)
AEu
x
(t,0) = k ˙u(t,0) −g(t) t ∈ (0, T)
Eu
x
(t,L) = −p(u(t,L) −l) t ∈ (0, T)
u(0,x) = u
0
(x) x ∈ (0,L)
˙u(0,x) = u
1
(x) x ∈ (0,L).
(8)
NonlinearFeedbackControlandArtificialIntelligenceComputationalMethodsappliedtoaDissipativeDynamicContact
Problem
529

where the contact condition is modelled with the fol-
lowing normal compliance function:
p(r) =
ε
−1
r if r ≥ 0
0 if r < 0.
(9)
Herein, ε is the stiffness coefficient. By using the nor-
mal compliance contact condition (6), the unilateral
Signorini’s condition
u(t,L) ≤ l, u
x
(t,L) ≤ 0, u
x
(t,L)(u(t,L) −l) = 0
is relaxed; formally, Signorini’s nonpenetration con-
dition is obtained in the limit ε →0. Thus, the contact
with a rigid obstacle can be viewed as a limit case of
contact with deformable support whose resistance to
compression subsequently increases.
The normal compliancecondition was proposed in
(Martins and Oden, 1987) with p(r) = c(r
+
)
m
where
c, m > 0 and r
+
= max{0, r}. Then it was used in
a large number of publications, see e.g. (Anders-
son, 1991; Andersson, 1995; Han and Sofonea, 2002;
Kikuchi and Oden, 1988; Klarbring and Shillor, 1988;
Klarbring and Shillor, 1991; Rochdi and Sofonea,
1998).
3 EXISTENCE OF SOLUTIONS
This section is devoted to study the existence of weak
solutions of (8) assuming that f ∈ L
2
((0,T) ×(0,L))
and (u
0
,u
1
) ∈V := H
1
(0,L) ×L
2
(0,L). Without loss
of generality but simplifying the writing everywhere
in this section, we shall set E = 1, k = 1 and ρ ≡ 1.
First of all, note that, if u is a classical solution of (8),
we obtain that, for every v ∈ H
1
(0,L), the following
relation holds for almost any t ∈[0,T]
h¨u(t), vi+ hu
x
(t),v
x
i+ ( ˙u(t,0) + g(t))v(0)
+ p(u(t,L) −l)v(L) = hf(t),vi. (10)
In (10) and in the sequel, h , i denotes the inner prod-
uct in L
2
(0,L). By integrating in time (10), we obtain
that, for almost any t ∈[0,T],
h˙u(t), vi−
u
1
,v
+
Z
t
0
hu
x
(s),v
x
ids
+ v(0)
Z
t
0
g(s)ds+ (u(t,0) −u
0
(0))v(0)
+ v(L)
Z
t
0
p(u(s,L) −l)ds =
Z
t
0
hf(s),vids. (11)
These relations allow us to give the definition of a
weak solution of (8).
DEFINITION 3.1. A function u ∈C
1
([0,T];L
2
(0,L))∩
C([0, T];H
1
(0,L)) is a weak solution of (8) if it veri-
fies (11) for any v ∈ H
1
(0,L), u(0) = u
0
and ˙u(0) =
u
1
.
Note that a solution u ∈ C
2
([0,T];L
2
(0,T)) ∩
C
1
([0,T];H
1
(0,L)) of (11), also verifies (10) and it
is a strong (classical) solution of (8).
The main result of this section is the following.
THEOREM 3.1. Given T > 0, u
0
∈ H
1
(0,L), u
1
∈
L
2
(0,L), f ∈ L
2
((0,T) × (0,L)) and g ∈ L
2
(0,T),
equation (8) has a weak solution (in the sense of Def-
inition 3.1)
u ∈C
1
([0,T];L
2
(0,L)) ∩C([0, T];H
1
(0,L)). (12)
For the proof of Theorem 3.1 we use the well-
known Galerkin method (see, for instance, (Lions,
1969) and (Kim, 1989) where this method is applied
in similar cases). In order to do that, let (w
k
)
k≥1
⊂
C
∞
(0,L) be a basis of the space L
2
(0,L). For each
m ≥ 1, we define the space
V
m
= Span{w
1
,...,w
m
}.
Let us first prove three technical lemmas.
LEMMA 3.1. Let m ≥ 1. For any (a
0
j
)
1≤j≤m
∈ R
m
and (a
1
j
)
1≤j≤m
∈ R
m
, there exists a unique function
u
m
∈C
2
([0,T];V
m
) which verifies (10) for any v ∈V
m
and it is of the form
u
m
(t,x) =
m
∑
j=1
a
mj
(t)w
j
(x), (13)
with (a
mj
)
1≤j≤m
⊂ C
2
[0,T], a
mj
(0) = a
0
j
and
a
′
mj
(0) = a
1
j
.
Proof. Since any function in C
2
([0,T];V
m
) is of the
form (13) the result follows if we prove that there
exists a unique sequence (a
mj
)
1≤j≤m
⊂C
2
[0,T] with
a
mj
(0) = a
0
j
and a
′
mj
(0) = a
1
j
such that for each 1 ≤
i ≤ m we have that
m
∑
j=1
¨a
mj
(t)
w
j
,w
i
+
m
∑
j=1
a
mj
(t)
w
j,x
(t),w
i,x
+
m
∑
j=1
˙a
mj
(t)w
j
(0)w
i
(0) + g(t)w
i
(0)
+ p
m
∑
j=1
a
mj
(t)w
j
(L) −l
!
w
i
(L) = hf(t),w
i
i.
(14)
In order to simplify the writing we introduce the
following notations
A = (A
ji
)
1≤j,i≤m
= (hw
j
,w
i
i)
1≤j,i≤m
∈ R
2m
,
A
−1
= (α
ij
)
1≤j,i≤m
.
Note that, due to the linear independence of the
functions (w
j
)
j≥1
in L
2
(0,L), the matrix A is invert-
ible. For 1 ≤ j, i ≤ m we also note
hw
j,x
,w
i,x
i = β
ji
∈ R, w
j
(0)w
i
(0) = γ
ji
∈ R,
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
530

Therefore, the system (14) can be rewritten as fol-
lows,
˙a
mj
(t) = b
mj
(t)
˙
b
mj
(t) = c
mj
(t)
where
c
mj
(t) = −
m
∑
i=1
m
∑
k=1
a
mk
(t)α
ji
β
ki
−
m
∑
i=1
m
∑
k=1
b
mk
(t)α
ji
γ
ki
+ g(t)
m
∑
i=1
α
ji
w
i
(0)
− p
m
∑
k=1
a
mk
(t)w
k
(L) −l
!
m
∑
i=1
α
ji
w
i
(L)
+
m
∑
i=1
α
ji
hf(t), w
i
i. (15)
Notice that c = (c
m1
,c
m2
,...,c
mm
)
∗
∈ C([0, T];R
m
).
Here and in the sequel x
∗
denotes the adjoint of the
vector x.
Let y ∈ C
2
([0,T];R
2m
), y = (a,b)
∗
,
a = (a
m1
,a
m2
,...,a
mm
)
∗
∈ C([0, T];R
m
),
b = (b
m1
,b
m2
,...,b
mm
)
∗
∈C([0,T];R
m
).
The system (14) can be rewritten now as follows.
˙y(t) = F(y)(t)
where
F :C
2
([0,T];R
2m
) →C
2
([0,T];R
2m
) F y = (b,c)
∗
.
The function F is a Lipschitz continuous one. Indeed,
if we take t ∈ [0,T] we have that
k(Fy
1
−Fy
2
)(t)k
R
2m
≤ k
1
(kb
1
(t) −b
2
(t)k
R
m
+ kc
1
(t) −c
2
(t)k
R
m
)
≤ k
2
(kb
1
(t) −b
2
(t)k
R
m
+
m
∑
j=1
|c
1
mj
(t) −c
2
mj
(t)|).
(16)
Since
|c
1
mj
(t) −c
2
mj
(t)| ≤
m
∑
i,k=1
|a
1
mk
(t) −a
2
mk
(t)|α
ji
β
ki
+
m
∑
i,k=1
|b
1
mk
(t) −b
2
mk
(t)|α
ji
γ
ki
+
p
m
∑
k=1
a
1
mk
(t)w
k
(L) −l
!
−p
m
∑
k=1
a
2
mk
(t)w
k
(L) −l
!
×
m
∑
i=1
α
ji
w
i
(L), (17)
as p is a Lipschitz continuous function we deduce
that
|c
1
mj
(t) −c
2
mj
(t)| ≤ k
3
(ka
1
(t) −a
2
(t)k
R
m
+ kb
1
(t) −b
2
(t)k
R
m
). (18)
By (16), (17) and (18) we can write
k(Fy
1
−Fy
2
)(t)k
R
2m
≤ k
4
(ka
1
(t) −a
2
(t)k
R
m
+ kb
1
(t) −b
2
(t)k
R
m
)
≤ k
5
max
t∈[0,T]
ky
1
(t) −y
2
(t)k
R
2m
. (19)
Therefore,
kFy
1
−Fy
2
k
C([0,T];R
2m
)
≤ k
5
ky
1
−y
2
k
C([0,T];R
2m
)
.
Since (14) is a system of ordinary differential
equations with a Lipschitz nonlinear term, it fol-
lows that there exists a unique solution (a
mj
)
1≤j≤m
⊂
C
2
[0,T] with a
mj
(0) = a
0
j
and ˙a
mj
(0) = a
1
j
of (14).
LEMMA 3.2. The sequence (u
m
)
m≥1
given by
Lemma 3.1 is uniformly bounded in the space
L
∞
([0,T];H
1
(0,L)) ∩H
1
([0,T];L
2
(0,L)).
Proof. Since u
m
verifies (10) for any v ∈V
m
it follows
that,
h¨u
m
(t),ϕ
m
(t)i+ hu
m,x
(t),ϕ
m,x
(t)i
+ ( ˙u
m
(t,0) + g(t))ϕ
m
(t,0)
+ p(u
m
(t,L) −l)ϕ
m
(t,L) = hf(t),ϕ
m
(t)i, (20)
for any ϕ
m
∈C
2
([0,T];V
m
). Now, if we take ϕ
m
= ˙u
m
in (20) we deduce that
d
dt
1
2
Z
L
0
˙u
2
m
(t,x)dx+
1
2
Z
L
0
u
2
m,x
(t,x)dx
+
ε
2
(p(u
m
(t,L) −l))
2
+( ˙u
m
(t,0))
2
+ g(t) ˙u
m
(t,0) = hf(t), ˙u
m
(t)i.
If we define the energy of the solution by
E
m
(t) =
1
2
Z
L
0
˙u
2
m
(t,x)dx+
1
2
Z
L
0
u
2
m,x
(t,x)dx
+
ε
2
(p(u
m
(t,L) −l))
2
,
we obtain from the previous relation that
d
dt
E
m
(t) ≤ hf(t), ˙u
m
(t)i+
1
2
g
2
(t).
Let t ∈ [0, T]. After integration between 0 and t we
get
E
m
(t) ≤ E
m
(0) +
Z
t
0
1
2
Z
L
0
˙u
2
m
(s,x)dxds
+
1
2
Z
t
0
g
2
(s)ds+
1
2
Z
t
0
Z
L
0
f
2
(s,x)dxds
and from this we deduce
E
m
(t) ≤ E
m
(0) +
1
2
Z
t
0
g
2
(s)ds
NonlinearFeedbackControlandArtificialIntelligenceComputationalMethodsappliedtoaDissipativeDynamicContact
Problem
531

+
1
2
Z
t
0
Z
L
0
f
2
(s,x)dxds+
Z
t
0
E
m
(s)ds.
By using a Gronwall inequality we can write
E
m
(t) ≤
E
m
(0) +
1
2
Z
t
0
g
2
(s)ds
+
1
2
Z
t
0
Z
L
0
f
2
(s,x)dxds
e
t
≤
E
m
(0) +
1
2
Z
t
0
g
2
(s)ds
+
1
2
Z
T
0
Z
L
0
f
2
(s,x)dxds
e
T
.
Therefore, we have that
Z
L
0
˙u
2
m
(t,x)dx ≤
E
m
(0) +
1
2
Z
t
0
g
2
(s)ds
+
1
2
Z
T
0
Z
L
0
f
2
(s,x)dxds
e
T
,
Z
L
0
u
2
m,x
(t,x)dx ≤
E
m
(0) +
1
2
Z
t
0
g
2
(s)ds
+
1
2
Z
T
0
Z
L
0
f
2
(s,x)dxds
e
T
.
The required boundedness properties are straight-
forward consequences of the last two inequali-
ties.
LEMMA 3.3. Suppose that
m
∑
j=1
a
0
j
w
j
→ u
0
in H
1
(0,L) as m → ∞, (21)
m
∑
j=1
a
1
jm
w
j
→ u
1
in L
2
(0,L) as m →∞. (22)
There exists a subsequence (u
m
k
)
k≥1
of the sequence
(u
m
)
m≥1
given by Lemma 3.1 and a function u ∈
C
1
([0,T];L
2
(0,L)) ∩C([0, T];H
1
(0,L)) such that
u
m
k
⇀
∗
u in L
∞
([0,T];H
1
(0,L)) (23)
u
m
k
⇀ u in H
1
([0,T];L
2
(0,L)). (24)
Proof. The existence of u follows from the bounded-
ness properties from Lemma 3.2.
Now we have all the ingredients needed to prove
the main result of this section.
Proof of Theorem 3.1. Let u be the function obtained
in Lemma 3.3. We provethat u verifies (11). From the
linearity and continuity of the left hand side of (11) in
v ∈ H
1
(0,L), it follows that (11) is equivalent to
˙u(t), w
j
−
u
1
,w
j
+
Z
t
0
u
x
(s),w
j,x
ds
+ (u(t,0) −u
0
(0))w
j
(0) + g(t)w
j
(0)
+ w
j
(L)
Z
t
0
p(u(s,L) −l)ds =
Z
t
0
f(s),w
j
ds,
(25)
for each j ≥ 1. Now, the fact that u verifies (25) fol-
lows by taking the limit when m tends to infinity in
(14), by using the convergence properties (21)-(24)
and by integrating in time from 0 to t.
Finally, we remark that, from (10), the unique-
ness of a classical solution u ∈ C
2
([0,T];L
2
(0,T)) ∩
C
1
([0,T];H
1
(0,L)) of (8) can be easily proved. The
uniqueness of a weak solution is more difficult to
show and it will be addressed in a future work.
4 NUMERICAL
APPROXIMATION OF
SOLUTIONS
As Bertrand Russell said, “although this may seem a
paradox, all exact science is dominated by the idea of
approximation”. Numerical approximations are even
more useful for problems which cannot be analyti-
cally solved. In order to numerically solve the mixed
initial boundary value problem for hPDE (8), we con-
sider an approach of Method of Lines which employs
the paradigm of Cellular Neural Networks.
The Method of Lines is a general concept rather
than a specific method and, can be used for solving
hyperbolic PDEs. The overall philosophy is to sep-
arately cope with the space and time discretization.
The first step is to choose an adequate method for dis-
cretizing hPDE with respect to the space variables and
incorporate the boundary conditions. “The spectrum
of this discrete operator is then used as a guide to
choose an appropriate method to integrate the equa-
tions through time” (Hyman, 1979).
4.1 The Approximating System Via
Method of Lines
The main idea of our numerical technique is the fol-
lowing. For the first step of MoL – the discretization
of derivatives with respect to the space coordinates
by taking into account the boundary conditions – we
use an approach which, according to (Halanay and
R˘asvan, 1981), ensures for the approximating system
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
532

the requirements for convergence and stability preser-
vation of the initial problem. Subsequently, we derive
the approximated solution by mapping the new prob-
lem – an initial value problem – on an optimal struc-
ture of CNNs. Thus, the parallelism and regularities
of the new problem are better exploited and, choos-
ing an adequate solver from those already existing in
dedicated software packages, the computational effort
and storage can be considerably reduced.
4.1.1 Preliminaries
Consider the hPDE problem (8). We introduce the
new variables v(t,x) = ˙u(t,x) and w(t,x) = u
x
(t,x)
and write the problem in the Friedrichs form
˙v(t,x) −c
2
w
x
(t,x) =
1
ρA
f(t, x)
˙w(t,x) −v
x
(t,x) = 0
(26)
where c =
p
E/ρ is the velocity of propagation for
the material of the rod. Note that the system’s matrix
A =
0 −c
2
−1 0
has the eigenvalues ±c. Considering, without losing
of the generality of the problem, L = 1, ε = 1, the
boundary conditions (BCs) read as
AEw(t,0) −kv(t,0) = −g(t)
Ew(t,1) = −p(z(t))
z(t) = u(t,1) −l
˙z = v(t,1).
(27)
where z is a new variable.
If data are smooth enough, the initial conditions
(ICs) can be deduced from (8) and have the following
form
w(0,x) = w(t,x) |
t=0
= u
x
(t,x) |
t=0
= u
0
x
(x)
v(0,x) = v(t,x) |
t=0
= ˙u(t,x) |
t=0
= u
1
(x)
z(0) = u(1,0) −l = u
0
(1) −l.
(28)
The possible stationary solutions for f (t,x) = 0,
g(t) = 0, p(·) = 0, obtained from (26)–(27) by con-
sidering the time derivatives to be zero, are
¯v = 0, ¯w = 0, ¯z = u
0
(1) −l.
Next, we introduce the Riemann invariants r
1
and r
2
as
r
1
(t,x) = v(t,x) −cw(t, x)
r
2
(t,x) = v(t,x) + cw(t, x)
(29)
with their transform pair
v(t, x) =
1
2
[r
1
(t,x) + r
2
(t,x)]
w(x,t) =
1
2c
[−r
1
(t,x) + r
2
(t,x)].
(30)
Thus, we obtained a decoupled PDE system in normal
form
∂r
1
∂t
(x,t) + c·
∂r
1
∂x
(x,t) =
1
ρA
f(t, x)
∂r
2
∂t
(t,x) −c·
∂r
2
∂x
(x,t) =
1
ρA
f(t, x)
(31)
with BCs
r
1
(t,0) = −a·r
2
(t,0) + 2bg(t)
r
2
(t,1) = r
1
(t,1) −2dp(z(t))
z(t) = u(t, 1) −l
˙z(t) =
1
2
[r
1
(t,1) + r
2
(t,1)]
(32)
and ICs
r
1
(0,x) = v(0,x) −cw(0, x) = u
1
(x) −cu
0
x
(x)
r
2
(0,x) = v(0,x) + cw(0, x) = u
1
(x) + cu
0
x
(x)
z(0) = u
0
(1) −l.
(33)
The notations in (32) are as follows
a =
k−A
√
ρE
k+ A
√
ρE
, b =
1
k+ A
√
ρE
, d =
1
√
ρE
.
4.1.2 The Approximating System of ODEs for
the Initial hPDE Problem
As already said, MoL provides algebraic approxima-
tions for the space derivatives, thus allowing the con-
version of the mixed initial boundary value problem
for hPDE into an initial value problem for a high-
dimensional system of ODEs.
In the sequel we apply the Method of Lines for
the one-dimensional hPDE problem in the normal
form (31)–(32)–(33). Firstly, let us observe from (31)
that r
1
represents the forward wave and r
2
the back-
ward wave. This information is useful in applying the
NonlinearFeedbackControlandArtificialIntelligenceComputationalMethodsappliedtoaDissipativeDynamicContact
Problem
533

Courant-Isaacson-Rees rule for discretization with re-
spect to the space variable x in order to ensure a good
coupling with the boundary conditions.
Let us discretize the interval [0,1], where x is
defined, with equally spaced points and denote N –
the number of intervals, h = 1/N – the discretization
step and x
i
= ih. The approximations for the deriva-
tives with respect to the space variable are performed
according to the above-mentioned Courant-Isaacson-
Rees rule as follows
• the backward Euler scheme – for the forward
wave r
1
(t,x),
• the forward Euler scheme – for the backward
wave r
2
(t,x).
Next, we denote the functions that approximate
the two waves at the discrete points x
i
: ξ
i
1
(t) ≈
r
1
(ih,t) and ξ
i
2
(t) ≈ r
2
(ih,t), i =
0,N. Without tak-
ing into account the BCs and having the axial force of
density along the rod f(t, x) = 0, we formally obtain
for (31) the following system of ODEs, written in the
normal Cauchy form
˙
ξ
i
1
(t) = sξ
i−1
1
−sξ
i
1
, i =
1,N
˙
ξ
i
2
(t) = −sξ
i
2
+ sξ
i+1
2
, i =
0,N −1
(34)
with s = cN. From (32), the boundary conditions be-
come
ξ
0
1
(t) = −a·ξ
0
2
(t) + 2bg(t)
ξ
N
2
(t) = ξ
N
1
(t) −2dp(z(t))
˙z(t) =
1
2
[ξ
N
1
(t) + ξ
N
2
(t)]
(35)
Substituting (35) in (34), the system of ODEs which
embeds the boundary conditions is
˙
ξ
1
1
(t) = −saξ
0
2
−sξ
1
1
+ 2bg(t)
˙
ξ
i
1
(t) = sξ
i−1
1
−sξ
i
1
, i =
2,N
˙
ξ
i
2
(t) = −sξ
i
2
+ sξ
i+1
2
, i =
0,N −2
˙
ξ
N−1
2
(t) = −sξ
N−1
2
+ sξ
N
1
−2sdp(z(t))
˙z(t) = ξ
N
1
−dp(z(t))
(36)
with the initial conditions given by (32)–(33)
ξ
i
1
(0) = u
1
(x
i
) −cu
0
x
(x
i
) , i =
1,N −1
ξ
i
2
(0) = u
1
(x
i
) + cu
0
x
(x
i
) , i =
1,N −1
ξ
N
1
(0) = u
1
(1) −cu
0
x
(1) + 2dp(z(0))
ξ
0
2
(0) = −u
1
(0) + cu
0
x
(0) +
2b
a
g(0)
z(0) = u
0
(1) −l.
(37)
Thus, the initial problem – described by a one
dimensional hyperbolic partial differential equation
with boundary dissipation at one extremity and a nor-
mal compliance condition at the other extremity – is
converted into the initial value problem (36)–(37). We
emphasize that, if the initial and boundary conditions
are “matched” in (37), each solution of system (36)
approximates the corresponding wave at the discrete
point x
i
. This is a necessary condition in order to
avoid the propagation of the initial discontinuities.
From the dynamical systems point of view, the ap-
proximating system (36) can be represented as in Fig-
ure 2, i.e. as a structure with nonlinear feedback and
reference signal, more specifically, a feedback con-
nection of the nonlinear block µ(t) = −p(σ(t)) with
the linear block L whose dynamics is described by
˙y(t) = Ay+ b
1
µ(t)+ b
2
g(t)
σ(t) = c
T
y
(38)
where
y
T
= [ ξ
1
1
... ξ
N
1
ξ
N−1
2
... ξ
0
2
z ] (39)
and A is the matrix of the linear block, b
T
1
= [−2sd −
d], b
T
2
= [2b 0], p(·) is the nonlinear function and g(t)
is a time-varying reference signal.
The linear block L of the nonlinear system has a
simple zero eigenvalue and all the rest of the eigenval-
ues belong to the left half-plane of C. The qualitative
analysis of the nonlinear system can be performed via
the approach and methods of absolute stability the-
ory – for instance, by using the Popov frequency do-
main inequalities for the critical case with a simple
zero root.
4.2 The CNN Paradigm for Numerical
Solution of the Approximating
System
Due to the fact that the approximating system of
ODEs displays the usual regularities induced by the
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
534

-
L
p( )
g(t)
Figure 2: Structure with nonlinear feedback and reference
signal.
numerical solving of a PDE problem, one can use the
CNN paradigm.
Cellular Neural Networks are artificial recurrent
neural networks displaying local interconnections
among their cells (identical elementary nonlinear dy-
namical systems), feature which makes them desir-
able for processing huge amounts of data even in
VLSI implementation. The key idea of the CNNs
paradigm resides in representing the interactions
among the cells by cloning templates – which can be
either translation-invariant or regularly varying tem-
plates (Chua and Roska, 1993). Let us briefly intro-
duce their basic characteristics. A general form for
the dynamics of a cell in a 2D-array can be described
by (Szolgay et al., 1993), (Gilli et al., 2002)
˙x
ij
(t) =
∑
k,l∈N
r
(ij)
T
A
ij,kl
f(x
kl
) +
∑
k,l∈N
r
(ij)
T
B
ij,kl
u
kl
−
∑
k,l∈N
r
(ij)
T
C
ij,kl
x
ij
+ I
ij
(40)
where x
ij
is the state variable of ij
th
cell, u
kl
is the in-
put variable from the neighboring cells acting on ij
th
cell, N
r
(ij) – the r-neighborhood of ij
th
cell, T
A
ij,kl
is
the output feedback cloning template, T
B
ij,kl
the control
cloning template, T
C
ij,kl
is the state feedback cloning
template, I
ij
is a bias or a constant or time-dependent
external stimulus. Usually, the nonlinearity f (·) is the
unit bipolar ramp function
f(x
ij
) =
1
2
(|x
ij
+ 1|−|x
ij
−1|) (41)
a bounded, nondecreasing and globally Lipschitzian
function, with the Lipschitz constant L
i
= 1. In
some cases, one can consider only the linear part, i.e.
f(x
ij
) = x
ij
.
The problem of representing PDEs via CNNs led
to more complex forms for cell dynamics, and it
was shown that the flexibility of CNNs allows using
them for different approaches in modelling and solv-
ing problems having some inherent parallelism and
regularities, as it is also the case for PDEs manipula-
tions (op. cit.).
The first step for revealing the one-to-one corre-
spondence between the system of ODEs (36) and a
CNN structure is to reorder the equations in (36) for
identifying the so-called “cloning templates”. For our
problem, we can consider the one-dimensional CNN
with state vector
y
T
= [ ξ
1
1
ξ
2
1
... ξ
N
1
ξ
N−1
2
... ξ
1
2
ξ
0
2
] (42)
and another simple network with the dynamics
˙z(t) = y
N
+ p(z(t)). (43)
This arrangement leads to the following sim-
ple cloning feedback templates for the inner cells
C
2
...C
2N−1
:
T
A
i
= [s 0 0] , T
C
i
= [0 s 0] , i =
2,2N −1. (44)
If, for further computational and simulation tasks, one
considers in (40) f(x
ij
) = x
ij
, one can introduce a
template in a compact form which embeds the output
feedback template T
A
and the decay term template T
C
and reads as
T
AC
i
= [s −s 0] , i =
2,2N −1. (45)
The dynamics of the inner cells of CNN is given by
the following equations
˙y
i
(t) =
s −s 0
y
i−1
y
i
y
i+1
,
i =
2,N ∪ N + 2,2N −1
˙y
N+1
(t) = T
AC
N+1
·y
N,N+2
+ I
N+1
(t)
(46)
with I
N+1
(t) = −2sdp(z(t)).
In the same manner, the dynamics for the corner cells
C
1
and C
2N
is described by
˙y
1
(t) = −T
C
1
y
1
+ T
A
1
y
2N
+ I
1
(t)
˙y
2N
(t) = −T
C
2N
y
2N
+ T
A
2N
y
2N−1
(47)
with T
C
1
= T
C
2N
= T
A
2N
= s, T
A
1
= −sa, I
1
= 2bg(t).
If, on the other hand, we consider the closed loop
structure induced by (39), the template (45) is also
valid for i = 2N which is more convenient from the
computational point of view, since there will remain
only 3 entries to be separately specified within the ma-
trix T
AC
.
Another approach will be to consider the vector
state
NonlinearFeedbackControlandArtificialIntelligenceComputationalMethodsappliedtoaDissipativeDynamicContact
Problem
535
0
0.5
1
0
0.5
1
1.5
2
2.5
x 10
−3
−1.5
−1
−0.5
0
0.5
1
1.5
time [sec]
x ∈ [0, 1]
r
1
(t,x) [m/sec]
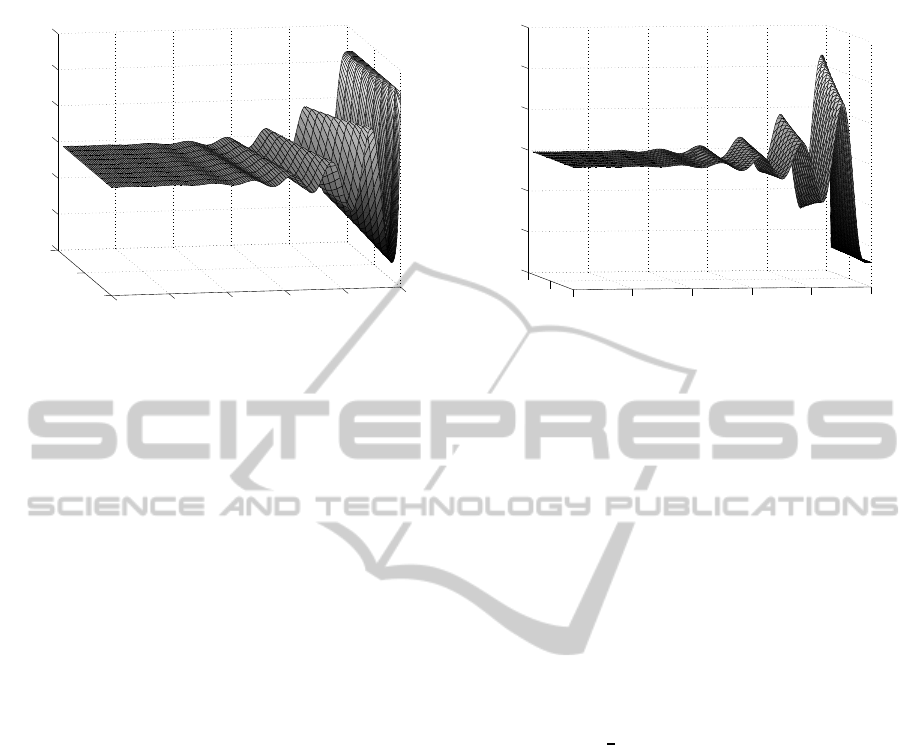
Figure 3: 3D representation of the forward wave r1(t, x) for
g(t) = 0, f(t, x) = 0 and ICs (50).
y
T
= [ ξ
1
1
ξ
2
1
... ξ
N
1
z ξ
N−1
2
... ξ
1
2
ξ
0
2
]. (48)
This arrangement will give different output feedback
cloning template T
AC
i
and the dynamics for the cells
with nonlinear entries will be described by
˙y
N+1
(t) =
1 −d 0
y
N
p(y
N+1
)
y
N+2
˙y
N+2
(t) =
s −2sd −s 0 0
y
N
p(y
N+1
)
y
N+2
y
N+3
y
N+4
(49)
with T
B
N+1
= T
B
N+2
= 0, I
N+1
= I
N+2
= 0.
Let us observe that for the first proposed arrange-
ment, described by the state vector (42), the matrix
for the linear block – the CNN matrix – has the form
of a circulant matrix.
5 SIMULATION RESULTS
The results of the simulations allow us to verify the
efficiency of the numerical technique, to validate the
theoretical results and to understand the physical phe-
nomenon of the propagation of longitudinal vibra-
tions along an elastic rod with boundary constraints
and initial conditions described in (8) and Figure 1.
The simulations were performed for the approxi-
mating system of ODEs (36). The initial value prob-
lem was numerically solved in MATLAB making
use of the CNN structure induced by the state vec-
tor (39). In this manner the interconnection matrix
0
0.5
1
0
0.5
1
1.5
2
2.5
x 10
−3
−1.5
−1
−0.5
0
0.5
1
1.5
time [sec]
x ∈ [0, 1]
r
2
(t,x)[m/sec]
Figure 4: 3D representation of the backward wave r2(t,x)
for g(t) = 0, f (t, x) = 0 and ICs (50).
T
AC
was found to be an almost bi-diagonal lower ma-
trix (excepting 2 elements (a
1,2N
and a
2N+1,N
)) with
only 3 entries which do not obey the template T
AC
i
=
[ s −s 0]. We have taken advantage of this sparsity
property in order to reduce the computational effort
and storage.
For the simulation purpose, we considered the
following values for the parameters: E = 288 ·
10
6
N/m
2
, ρ = 8 kg/m
3
, L = 1 m, A = 0.25·10
−4
m
2
,
l = 1.02 m. For the initial conditions, we have taken
into account the situation suggested in (Timoshenko,
1937): the rod “compressed by forces applied at the
ends, is suddenly released of this compression at t =
0”. This led in our case to the following ICs:
u
0
(x) = 1+
e
2
−ex, x ∈[0, 1], u
1
(x) = 0
0, otherwise
(50)
with the unit compression e = 2 ·10
−4
. For simula-
tions, the space discretization step h = 1/10 was suf-
ficiently small for the convergence of the algorithm
(simulations performed with h=1/200 lead to same re-
sults).
We have selected 8 figures to show the results
of simulations: Figure 3 – Figure 10. Figures 3, 4,
5 present a space-time evolution of the forward and
backward waves, as well as the velocity v(t,x) for the
following case: the external forces are zero, i.e.g(t) =
0, f(t,x) = 0 and the damping factor k = 2·10
−4
(very
small and of the same order as the time constant of the
system). Taking t ≤ 2.5 ·10
−3
sec, we focus here on
the effects of initial data (50) on the solutions’ evolu-
tion.
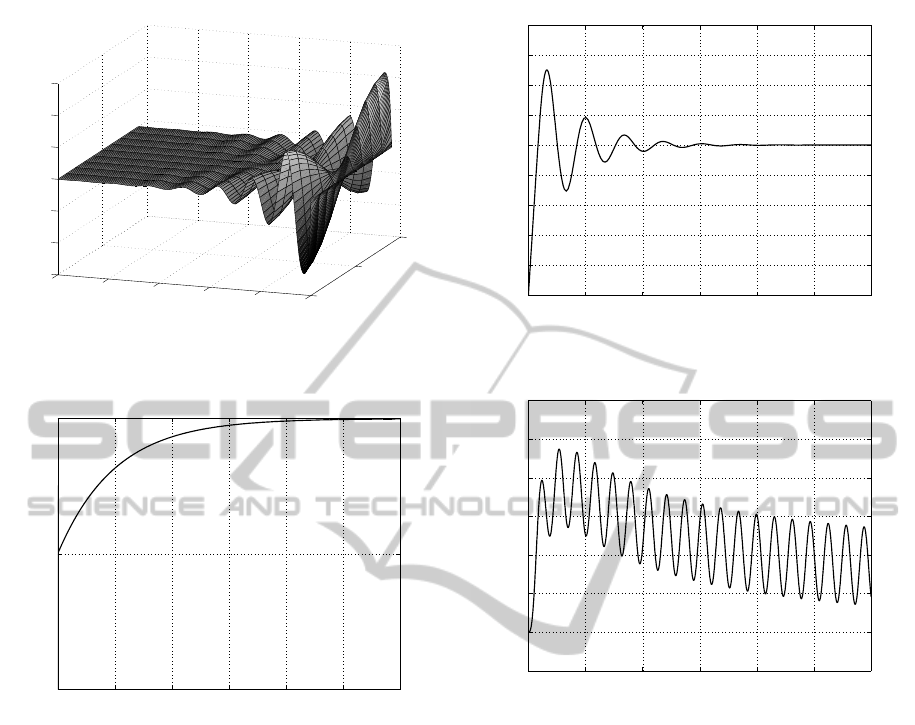
Figures 6, 7, 8, 9, 10 focus on the time evolution
of the displacement u(t,x) at the end x = 1 of the rod.
First two plots show the time evolution of u(t, 1) for
g(t) = 0 and k = 2·10
−4
. One can see that the trajec-
tory starts at u = −10
−4
= u
0
(1) = ξ
N
1
(0) and the ef-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
536
0
0.5
1
0
0.5
1
1.5
2
2.5
x 10
−3
−1.5
−1
−0.5
0
0.5
1
1.5
x ∈ [0,1]
time [sec]
v(t,x) [m/sec]
Figure 5: 3D representation of the velocity v(t, x) for g(t) =
0, f(t, x) = 0 and ICs (50).
0 1 2 3 4 5 6
0.9999
1
1.0001
time [sec]
u(t,1) [m]
Figure 6: The approximation of the displacement u(t,x) at
x = 1 for g(t) = 0, k = 2·10
−4
.
fects of the initial conditions vanish after 7 time con-
stants (the settling time being t
s
= 1.11·10
−3
sec). For
this case, the rod does not interact with the obstacle,
the displacement being smaller than the initial gap.
The last three figures show the time evolution of
u(t,1) for a time-varying external stimulus g(t) with
f(t, x) = 0 and different values of the damping coef-
ficient. Figures 8 and 9 correspond to the case z > 0,
i.e. the rod interacts with the obstacle at x = 1. They
reveal the cumulated effects of the initial data, stim-
ulus, the nonlinearity p(·) and of the small damping
coefficient related to the amplitude of the stimulus.
These factors lead to additional oscillating modes and
delay the stabilization.
If, on the other hand, the amplitude of the stimu-
lus is not large enough compared to the damping fac-
tor, z < 0 and the rod does not penetrate the obstacle,
which means p(z) = 0. As a consequence, the settling
time is short and the movement of the rod is of the
0 0.5 1 1.5 2 2.5 3
x 10
−3
0.9999
0.9999
0.9999
1
1
1
1
1
1.0001
1.0001
time [sec]
u(t,1) [m]
Figure 7: Zoom-in of u(1,t) for g(t) = 0 and k = 2·10
−4
.
0 5 10 15 20 25 30
0.99
1
1.01
1.02
1.03
1.04
1.05
1.06
time [sec]
u(t,1) [m]
Figure 8: The approximation of the displacement u(t,x) at
x = 1 for g(t) = 2sin4t, k = 2·10
−4
.
same type as the reference signal, g(t), as it is shown
in Figure 10.
6 CONCLUSIONS
In this paper we have considered a Mechanical con-
tact problem of an elastic rod with a dashpot attached
to the left end x = 0 and a deformable obstacle with
normal compliance at the opposite extremity x = L.
The rod was subjected to a body force of density f
in the x-direction and to an external force g(t) which
acts at the extremity x = 0. The problem leads to an
one-dimensional hyperbolic equation with boundary
dissipation at one extremity and a regularized con-
tact law at the other extremity. We proved the ex-
istence of weak solutions in the corresponding finite
energy space H
1
(0,L)×L
2
(0,L). In order to approxi-
mate the solution of the problem we used a numerical
technique based on an approach of Method of Lines
NonlinearFeedbackControlandArtificialIntelligenceComputationalMethodsappliedtoaDissipativeDynamicContact
Problem
537
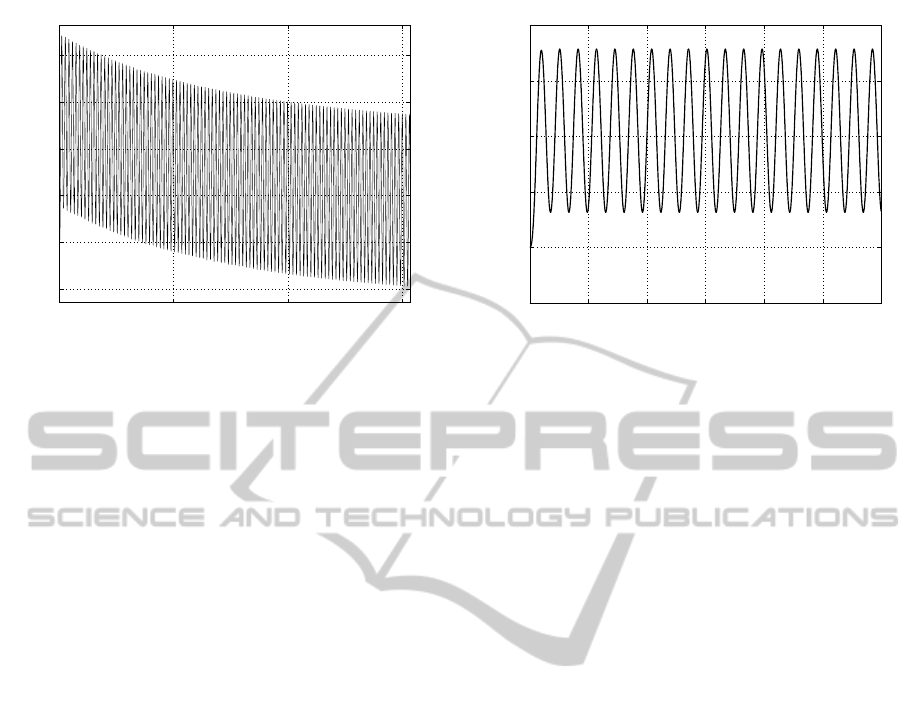
0 50 100 150
0.99
1
1.01
1.02
1.03
1.04
time [sec]
u(t,1) [m]
Figure 9: u(t,x) at x = 1 for N = 10, g(t) = 5sin4t, k =
8·10
−4
.
which ensures from the beginning the convergence of
the approximation and the preservation of stability of
the initial problem. Taken into consideration that the
conversion of the mixed initial boundary value prob-
lem for hPDE into an initial value problem leads to
a system of ODEs with a large number of equations
and sparse matrix, the numerical implementation and
simulations employed the CNN paradigm in order to
reduce the computational effort. Considering initial
data of the type encountered in engineering applica-
tions, the results of simulations allowed the visual-
ization of some hidden behaviors for small scales of
time, as well as for long-time behavior.
ACKNOWLEDGEMENTS
This work was partially supported by the grant num-
ber 10C/2014, awarded in the internal grant competi-
tion of the University of Craiova.
REFERENCES
Andersson, L.-E. (1991). A quasistatic frictional problem
with normal compliance. Nonlinear Analysis TMA,
(16):347–370.
Andersson, L.-E. (1995). A global existence result for a
quasistatic contact problem with friction. Advanced
in Mathematical Sciences and Applications, (5):249–
286.
Chua, L. and Roska, T. (1993). The cnn paradigm. IEEE
Trans. Circuits Syst. I, 40(3):147–156.
Danciu, D. (2013a). A CNN Based Approach for Solving
a Hyperbolic PDE Arising from a System of Conser-
vation Laws - The Case of the Overhead Crane, Ad-
vances in Computational Intelligence, volume 7903,
pages 365–374. Springer.
0 5 10 15 20 25 30
0.995
1
1.005
1.01
1.015
1.02
time [sec.]
u(1,t) [m]
Figure 10: u(t,x) at x = 1 for N = 10, g(t) = 2sin4t, k =
8·10
−4
.
Danciu, D. (2013b). Numerics for hyperbolic partial dif-
ferential equations (pde) via cellular neural networks
(cnn). In 2nd IEEE Int. Conf. on Systems and
Computer Science ICSCS’2013, pages 183–188, Vil-
leneuve d’Ascq, France.
Danciu, D. and R˘asvan, V. (2014). Delays and Propagation:
Control Liapunov Functionals and Computational Is-
sues, chapter 10. Advances in Delays and Dynamics.
Springer.
Galushkin, A. I. (2010). Neural Network Theory. Springer.
Gilli, M., Roska, T., Chua, L. O., and Civalleri, P. P. (2002).
Cnn dynamics represents a broader class than pdes. I.
J. Bifurcation and Chaos, (10):2051–2068.
Halanay, A. and R˘asvan, V. (1981). Approximations of
delays by ordinary differential equations. Recent ad-
vances in differential equations, pages 155–197.
Han, W. and Sofonea, M. (2002). Quasistatic Contact
Problems in Viscoelasticity and Viscoplasticity. Stud-
ies in Advanced Mathematics 30, American Mathe-
matical Society, Providence, RI—International Press,
Somerville, MA.
Hyman, J. (1979). A method of lines approach to the nu-
merical solution of conservation laws. Advances in
Delays and Dynamics. IMACS Publ. House.
Kikuchi, N. and Oden, J. (1988). Contact Problems in Elas-
ticity: A Study of Variational Inequalities and Finite
Element Methods. SIAM, Philadelphia.
Kim, J. U. (1989). A boundary thin obstacle problem for a
wave equation. Commun. P. D. E., (14):1011–1026.
Klarbring, A. Mikelic, A. and Shillor, M. (1988). Frictional
contact problems with normal compliance. Int. J. En-
gng. Sci., (26):811–832.
Klarbring, A. Mikelic, A. and Shillor, M. (1991). A global
existence result for the quasistatic frictional contact
problem with normal compliance. G. del Piero and F.
Maceri, eds., Unilateral Problems in Structural Anal-
ysis Vol. 4, Birkh¨auser.
Lions, J.-L. (1969). Quelques methodes de resolution
des problmes aux limites non lineaires. Dunod et
Gauthier-Villars, Paris.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
538

Martins, J. A. and Oden, J. T. (1987). Existence and unique-
ness results for dynamic contact problems with non-
linear normal and friction interface laws. Nonlinear
Analysis TMA, (11):407–428.
Rochdi, M. Shillor, M. and Sofonea, M. (1998). Quasistatic
viscoelastic contact with normal compliance and fric-
tion. Journal of Elasticity, (51):105–126.
Szolgay, P., Voros, G., and Eross, G. (1993). On the ap-
plications of the cellular neural network paradigm in
mechanical vibrating systems. IEEE Trans. Circuits
Syst. I, 40(3):222–227.
Timoshenko, S. (1937). Vibration problems in engineering.
D.Van Nostrand Company.
NonlinearFeedbackControlandArtificialIntelligenceComputationalMethodsappliedtoaDissipativeDynamicContact
Problem
539
