
Active Vibration Control of a Super Element Model of a Thin-walled
Structure
Nader Ghareeb
1
and R¨udiger Schmidt
2
1
Department of Mechanical Engineering, Australian College of Kuwait, Kuwait City, Kuwait
2
Institute of General Mechanics, RWTH Aachen University of Technology, Aachen, Germany
Keywords:
Super Element, Lyapunov Stability Function Controller, Positive Position Feedback, Strain Rate Feedback.
Abstract:
Reducing vibration in flexible structures has become a pivotal engineering problem and shifted the focus of
many research endeavors. One technique to achieve this target is to implement an active control system. A
conventional active control system is composed of a vibrating structure, a sensor to perceive the vibration,
an actuator to counteract the influence of disturbances causing vibration, and finally a controller to generate
the appropriate control signals. In this work, different linear controllers are used to attenuate the vibrations
of a cantilevered smart beam excited by its first eigenmode. A finite element (FE) model of the smart beam
is initially created and then modified by using experimental data. The FE model is then reduced to a super
element (SE) model with a finite number of degrees of freedom (DOF). Controllers are applied directly to the
SE and the results are presented and compared.
1 INTRODUCTION
In modern engineering, weight optimization has a pri-
ority during the design of structures. However, opti-
mizing the weight results in lower stiffness and less
internal damping, causing the structure to become ex-
cessively prone to vibration. Vibration can lead to
additional noise, a decrease in stability, and even to
the failure of the structure itself (Ghareeb and Radov-
cic, 2009). To overcome this problem, active or smart
materials are implemented. The coupled electrome-
chanical properties of smart materials, which are il-
lustrated here in the form of piezoelectric ceram-
ics, make these smart materials well-suited for be-
ing used as distributed sensors and actuators for con-
troling structural response. Although the piezoelec-
tric effect was first mentioned by Ha¨uy in 1817 and
demonstratedby Pierre and Jacques Curie in 1880, the
use of piezoelectric materials as actuators and sensors
for noise and vibration control has only been demon-
strated extensively over the past thirty years (Piefort,
2001). Bailey (Bailey, 1984) designed an active vibra-
tion damper for a cantilever beam using a distributed
parameter actuator consisting of a piezoelectric poly-
mer. Bailey and Hubbard (Bailey and Jr., 1985) de-
veloped and implemented three different control algo-
rithms to control the cantilevered beam vibration with
piezoactuators. Further, Crawley and de Luis (Craw-
ley and de Luis, 1987) and Crawley and Anderson
(Crawley and Anderson, 1990) presented a rigorous
study on the stress-strain-voltage behaviour of piezo-
electric elements bonded to beams. They observed
that the effective moments resulting from piezoactu-
ators can be regarded as concentrated at both ends of
the actuator while assuming a very thin bonding layer.
The practical implementation and use of the
piezoelectric actuators has been investigated in stud-
ies such as (Fanson and Chen, 1986) and (Moheimani
and Fleming, 2006). This work emphasizes the ca-
pabilities and applications of piezoelements as dis-
tributed vibration actuators and sensors by simulta-
neously controling a finite number of the infinite set
of modes of the actual system. On the other hand,
the majority of investigations were carried out ei-
ther through experiments on the real model as in
(Waghulde et al., 2010),(Block and Strganan, 1998),
or by using 2D or 3D FE models of the smart struc-
ture as in (Varadan et al., 1996),(Allik and Hughes,
1970). However, in the FE work, the damping coeffi-
cients were not calculated but rather assumed, which
may not reflect the exact performance of the real
model.
The present work comprises the modeling and de-
sign of different active linear controllers to attenu-
ate the vibration of a cantilevered smart beam excited
by its first eigenmode. The piezoactuator is initially
657
Ghareeb N. and Schmidt R..
Active Vibration Control of a Super Element Model of a Thin-walled Structure.
DOI: 10.5220/0005027206570664
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 657-664
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
modeled, and the relation between the voltage and the
moments at its ends is investigated. A modified FE
model of the smart beam based on first-order shear de-
formation theory (FOSD) is then created. The damp-
ing coefficients are calculated and added to the FE
model prior to the reduction to a SE model with a fi-
nite number of DOF. The FE and SE models are
validated by performing a modal analysis and com-
paring the results with the experimental data. Finally,
two different control strategies are introduced and im-
plemented on the SE model of the smart beam: Posi-
tive position feedback (PPF), and strain rate feedback
(SRF). Results are then compared to the results of ap-
plying a Lyapunov stability function controller which
was developed in (Ghareeb and Schmidt, 2012). The
FE package SAMCEF is used for the creation of both
the FE and SE models, as well as for the implemen-
tation of the controllers in the SE model.
2 MODELING
The first step in designing a control system is to
build a full representative mathematical model of
the real system including all the disturbances caus-
ing the unwanted vibration. The structural analytical
model can be derived either from physical laws (New-
ton’s motion laws, Lagrange’s equations of motion,
D’Alembert principle, etc), from test data using sys-
tem identification methods (stochastic subspace iden-
tification, prediction error method, etc), or by using
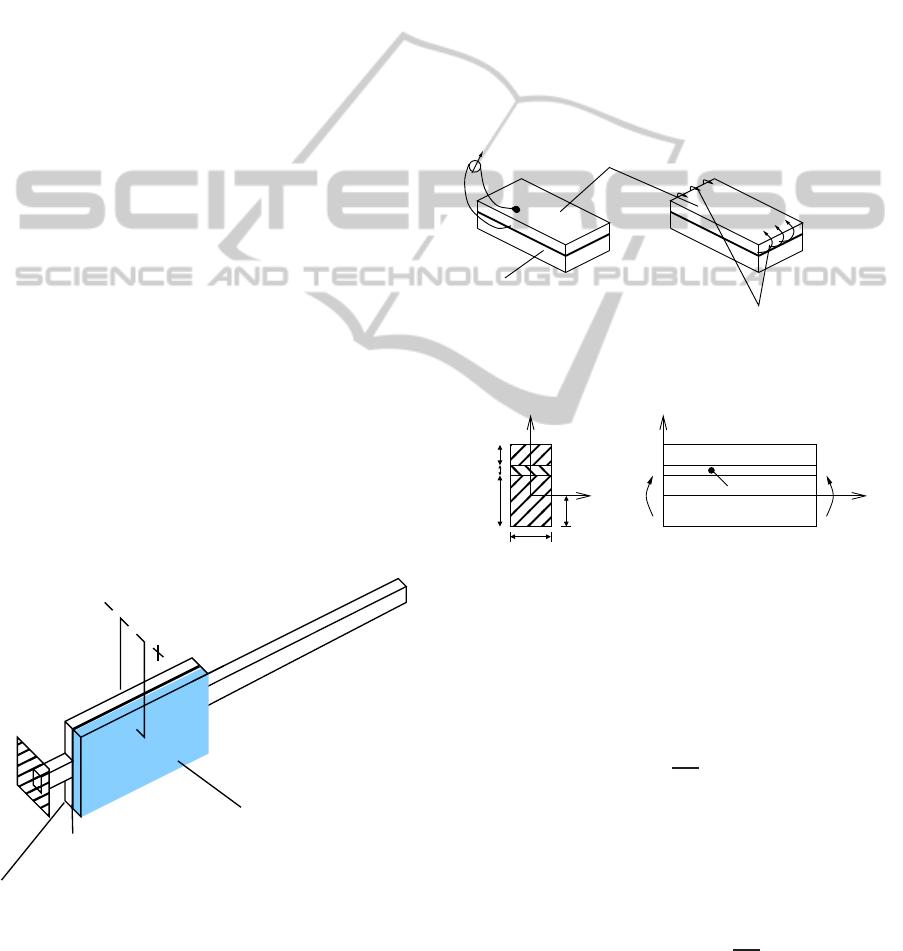
the FE method (Gawronski, 2004). The smart beam
used in this work consists of a steel beam, a bonding
layer and an actuator as seen in Figure 1.
actuator
V
beam
bonding layer
Figure 1: The smart beam.
2.1 Actuator Modeling
Using an actuator means imposing an appropriate
electric potential to control the vibration in the smart
structure (converse piezoelectric effect). Many FE
packages do not offer elements with electrical DOF.
On the other hand, the voltage applied by the actuator
can be represented by two equal moments with op-
posite directions concentrated at its ends (Fanson and
Chen, 1986). The relation between actuator moments
and voltage can be investigated, so that equivalent
moments are used instead as input to the controller
as illustrated in Figure 2. The structure is modeled as
one dimensional and the behavior of the piezoelectric
material is assumed to be linear throughout this work.
elastic material
V
−−>
piezoceramic material
equivalent moment pair Mp
Figure 2: The induced stresses from a piezoceramic actua-
tor.
b
y
D
t
t
z
actuator
adhesive
z
Mp Mp
beam
x
t
p
a
b
Figure 3: A schematic layout of the smart beam.
Considering the schematic layout of the middle
portion of the smart beam in Figure 3, if a voltage
V is applied accross the piezoelectric actuator while
assuming one dimensional deformation, the piezo-
electric strain ε
p
in the piezo is
ε
p
=
d
31
t
p
· V (1)
with V as the voltage of the piezo-electric actuator,
d
31
the electric charge constant and t
p
the thickness
of the actuator.
Using Hooke’s law, the longitudinal stress is defined
as
σ
p
= E
p
· ε
p
= E
p
·
d
31
t
p
· V (2)
Where E
p
is the Young’s modulus of elasticity of the
piezoceramic actuator.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
658
This stress generates a bending moment M
p
around
the neutral axis of the composite beam given by
M
p
=
Z
(t
p
+t
a
+t
b
−D)
(t
a
+t
b
−D)
σ
p
· b· zdz (3)
t
a
and t
b
are the thickness values of the adhesive layer
and the beam, b is the width of the composite layer
at beam’s middle, and D the distance from beam’s
bottom to the neutral axis.
Considering equilibrium of moments about the
neutral axis gives
Z
piezo
σ
p
dA +
Z
adhesive
σ
a
dA +
Z
beam
σ
b
dA = 0
(4)
This means,
E
p
b
Z
(t
p
+t
a
+t
b
−D)
(t
a
+t
b
−D)
zdz + E
a
b
Z
(t
a
+t
b
−D)
(t
b
−D)
zdz +
E
b
b
Z
(t
b
−D)
(−D)
zdz = 0 (5)
t
p
is the thickness of the beam, E
a
the Young’s mod-
ulus of the adhesive and E
b
the Young’s modulus of
the steel beam.
D =
E
p
t
2
p
+ 2E
p
t
p
t
a
+ 2E
p
t
p
t
b
+ E
a
t
2
a
+ 2E
a
t
a
t
b
+ E
b
t
2
b
2E
p
t
p
+ 2E
a
t
a
+ 2E
b
t
b
(6)
Substituting (6) and (2) in (3) determines the bending
moment generated by the piezo M
p
as a function of
the voltage V
M
p
=
E
p
E
a
(t
p
t
a
+t
2
a
) + E
p
E
b
(t
2
b
+t
p
t
b
+ 2t
a
t
b
)
E
p
t
p
+ E
a
t
a
+ E
b
t
b
·
d · b
2
·V
(7)
Since the relation between M
p
and V is now known,
the actuator moments will be taken instead of the volt-
age as the input to the controllers that are designed
and implementedin the next sections. The importance
of this achievement is that only mechanical DOF will
be included in the model.
2.2 FE Modeling of the Smart Beam
Many applications in structural dynamics can be suc-
cessful only when they are represented by an accurate
mathematical model. A way to derive this model is
to use FE modeling. In order to find the best FE
model that represents the smart beam, the optimal
type and size of the finite elements must be selected.
For this reason, a modal analysis of the real beam is
indispensable. The modal analysis is experimentally
performed, and results of the natural frequencies are
compared with those from the FE model. A detailed
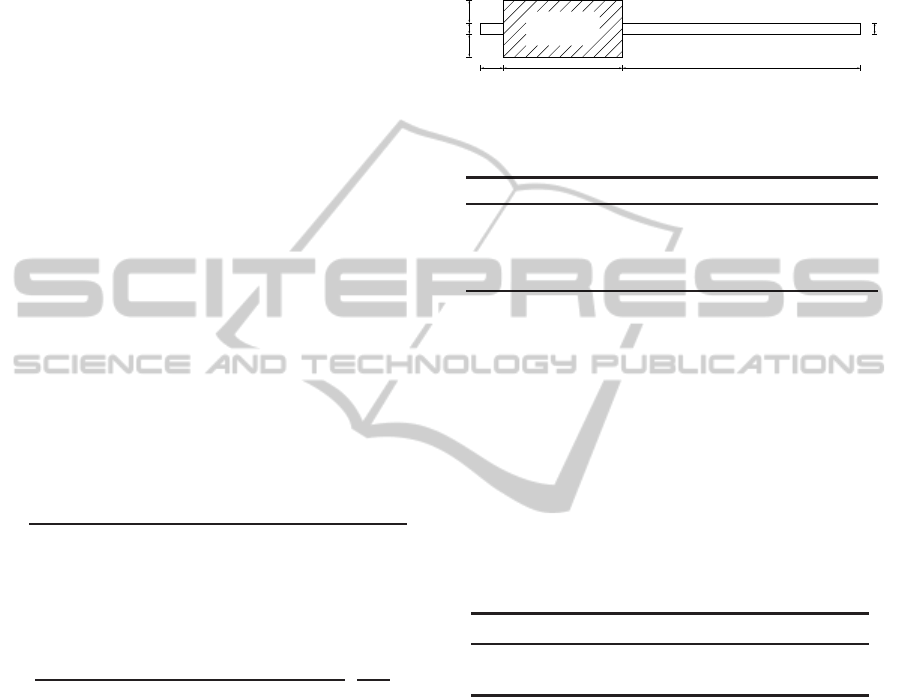
geometry of the smart beam is shown in Figure 4, and
the material properties and thickness of each part are
represented in Table 1.
5
layer
composite
10
5
10
10 75 130
Figure 4: A detailed geometry of the smart beam [dimen-
sions in mm].
Table 1: Parameters of the components of the smart beam.
Beam Bonding Actuator
Material steel epoxy PIC 151
Thickness [mm] 0.5 0.036 0.25
Density [kg/m
3
] 7900 1180 7800
Young’s mod. [MPa] 210000 3546 66667
The smart beam is created as a unique structure
but modeled as a composite shell with three layers
without any relative slip among their contact surfaces.
Furthermore, a composite shell element with eight
nodes based on the FOSD is used. To valiate the
FE model, a modal analysis is performed and the first
two eigenfrequencies are read and compared to those
from the experiment. This is presented in Table 2. As
a boundary condition, the far left edge of the smart
beam is clamped.
Table 2: validation of element-type based on the modal
analysis.
FE model Experiment
1
st
eigenfreq. [Hz] 13.81 13.26
2
nd
eigenfreq. [Hz] 42.67 41.14
2.2.1 Damping Characteristics
Damping parameters, which are of significant impor-
tance in determining the dynamic response of struc-
tures, cannot be deduced deterministically from other
structural properties or even predicted by using the
FE technique. For simplicity and convenience the
damping is assumed to be viscous and frequency de-
pendent (Alipour and Zareian, 2008). This linear ap-
proach assumes that the damping matrix is a linear
combination of the mass and stiffness matrices. Al-
though this idea was suggested for mathematical con-
venience only, yet it allows the damping matrix to be
diagonalized simultaneously with the mass and stiff-
ness matrices, preserving the simplicity of uncoupled
real normal modes as in the undamped case (Adhikari
and Woodhouse, 2001).
ActiveVibrationControlofaSuperElementModelofaThin-walledStructure
659

The relation is
C = αM + β K (8)
where α and β are real scalars that need to be deter-
mined.
To find out α and β , many methods can be ap-
plied like the method of Chowdhury and Dasgupta, or
the method of damping from normalised spectra (also
known as the half-power bandwidth method). These
methods and the way to find the results hereafter are
explained in details in (Ghareeb, 2013). Both meth-
ods are used in this work and the results are depicted
in Table 3.
Table 3: Results of α and β using both methods.
Parameter Chowdhury Half-power
α 0.02577 0.02955
β 9.918× 10
−6
9.77× 10
−6
3 THE SUPER ELEMENT
TECHNIQUE
The main advantage of this technique (also called
substructure technique) is the ability to perform the
analysis of a complete structure by using the results
of prior analysis of different regions comprising the
whole structure. When a preliminary analysis of the
different parts is performed, the computation time and
the size of the whole system are reduced. However, all
DOF considered useless for the final solution are con-
densed and the rest is retained. This means, the DOF
of the whole system will correspond to the retained
nodes plus a number of internal deformation modes,
(refer to SAMCEF tutorials). To construct a SE, or in
other words to remove the unwanted nodes and DOF
from the substructure, many methods are available.
In this work, The ”Component-mode method”, Also
known as Craig-Bampton method, is used (Craig and
Bampton, 1968).
3.1 SE Modeling
Before the SE is created, the retained nodes and the
condensed nodes must be designated and the num-
ber of internal modes to be used must be specified.
Once again, the number of modes must respond to
atleast ninety-five percent participation of the mass.
Based on the current work, ten internal modes are
used. The retained nodes are usually those where
boundary conditions are applied, or where stresses,
displacements, etc. are imposed or measured. On
these nodes the clamp is added and the actuators and
sensors are placed. All other nodes are considered as
condensed nodes. Concerning the smart beam used
in this work, there are five retained nodes in the SE
model (Figure 5) listed below:
• The SE is clamped at node 1
• The actuator moments, which will be the inputs to
the controller, are added at the nodes 2 and 3
• An additional sensor to measure the vibrations is
added at node 4 (to be used in future works)
• The sensor that measures the tip displacement is
located at node 5
1 4 5
2 3
Figure 5: The retained nodes of the SE.
3.2 Comparison between FE and SE
Model
In Table 4, a comparison between both models was
done. The number of elements, nodes, and DOF was
reduced and this has lead to a smaller structure and
thus less computation time.
Table 4: Comparison between FE and SE model.
FE model SE model
Number of nodes 8206 5
Number of elements 2575 1
DOF 49236 40
3.3 Validation of the SE Model
As shown in Table 5, results of modal analyses of
both models did not show a big difference concern-
ing the first four eigenfrequencies. Since the excita-
tion is done only with the first eigenfrequency, further
readings were not necessary. The SS representation is
then created upon specifying the type and position of
the inputs and outputs of the model.
Table 5: Comparison between the eigenfrequencies.
Eigenfreq. no. FE model SE model % Error
1 13.811 14.249 3.07
2 42.673 43.414 1.71
3 145.49 152.54 4.62
4 150.16 154.38 2.73
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
660

4 CONTROLLER DESIGN
The performance of smart structures for active vibra-
tion control depends strongly on the control algorithm
accompanied with it. In this part, the aim is to de-
sign some controllers capable of damping the vibra-
tion once the smart beam is excited by its first eigen-
mode. After the excitation, the beam is left to vibrate
freely. Exactly at this moment, the controllers are ac-
tivated. Two vibration suppression methods are used
in this work: The positive position feedback control
(PPF) and the strain rate feedback control (SRF).
4.1 Positive Position Feedback
Control (PPF)
This method was firstly proposed by Goh and
Caughey for the collocated sensors and actuators
(Goh and Caughey, 1985). Later on, it was used by
Fanson and Caughey to control large space structures
(Fanson and Caughey, 1990). The basic concept of
the PPF is to feed the structural position coordinate
directly to the compensator and the product of the
compensator and a scaler gain positively back to the
structure.
The scalar equations governing the vibration of the
structure in a single mode and the PPF controller are
given as
¨
ξ+ 2ζω
˙
ξ+ ω
2
ξ = Gω
2
η (9)
¨
η+ 2ζ
c
ω
c
˙
η+ ω
2
c
η = ω
2
c
ξ (10)
where ξ is the structural modal coordinate, η the com-
pensator modal coordinate, G the feedback gain, and
ζ and ζ
c
are the damping ratios, and ω and ω
c
the
natural frequencies of structure and compensator.
Since all the parts of the smart beam are integrated
in a single SE and the damping coefficients for the
whole system are calculated and the first eigenmode
of the model is excited, this means
ζ
c
= ζ (11)
ω
c
= ω (12)
To validate this supposition, the structure motion at
the steady state for a single DOF system can have the
form
ξ(t) = αe
iωt
(13)
and the compensator will then respond as
η(t) = βe
i(ωt− φ)
(14)
where the phase angle φ and the magnitude β are
φ = tan
−1
2ζ
c
(ω/ω
c
)
1− (ω/ω
c
)
2
β =
α
q
[1− (ω/ω
c
)
2
]
2
+ [2ζ
c
(ω/ω
c
)]
2
Since the structure and compensator have same fre-
quency as it was assumed before, then
ω
ω
c
= 1
For this reason φ =
π
2
, and β =
α
2ζ
c
Substituting φ and β in (13) and (14), and then back-
substituting in (9) gives
¨
ξ+ (2ζw+
Gw
2ζ
c
)
˙
ξ+ w
2
ξ = 0 (15)
Comparing (15) to (9), it can be seen that with the
assumption of equal frequencies between the struc-
ture and the compensator, there is an increase in the
damping ratio, which is called active damping.
A Nyquist stability analysis of the system of scalar
equations (9) and (10) results in the necessary and suf-
ficient condition for stability
stability if 0 < G < 1
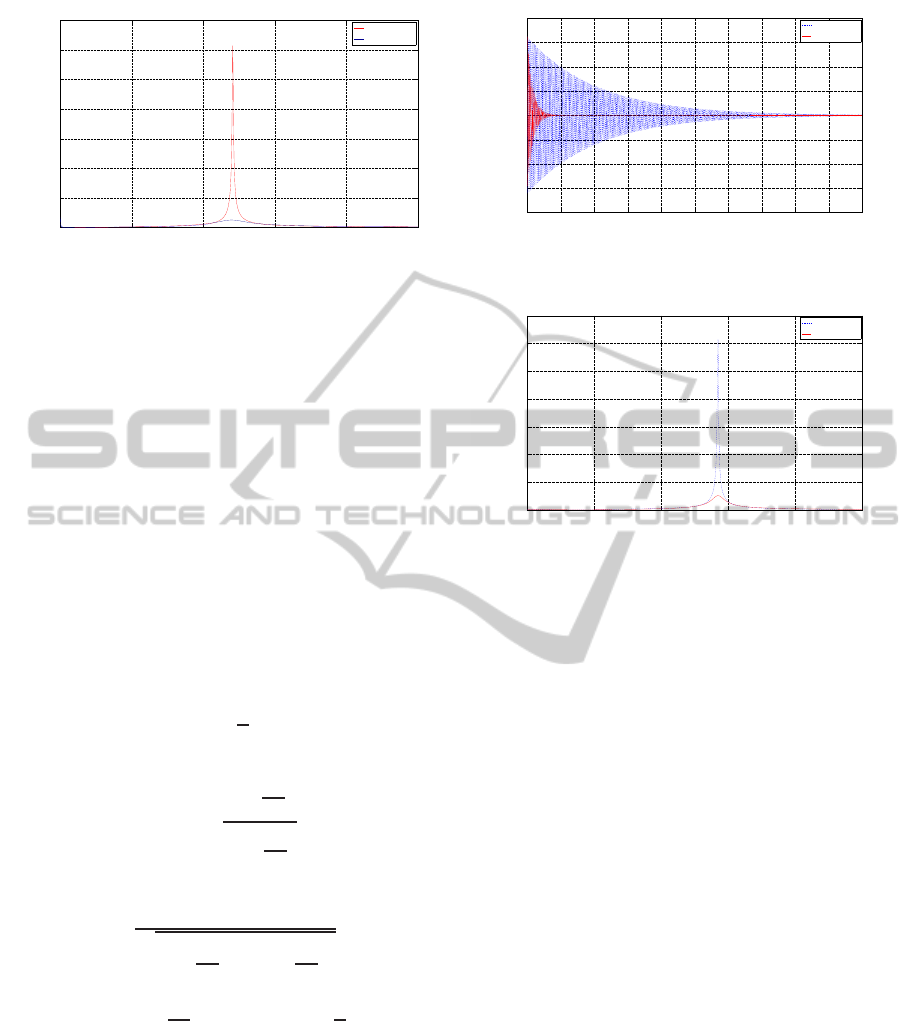
Implementing the PPF controller in the smart struc-
ture used in this work, has damped the tip displace-
ment as can be seen in Figure 6.
20 22 24 26 28 30 32 34 36 38 40
−0.03
−0.02
−0.01
0.00
0.01
0.02
0.03
Time (s)
Tip displacement (m)
No control
PPF
Figure 6: Tip displacement vs. time with and without con-
trol.
In the FFT spectrum diagram which is shown
in Figure 7, the effect of the PPF controller on the
amplitude of the peak displacement of the smart
beam and its magnitude is illustrated.
4.2 Strain Rate Feedback Control (SRF)
The SRF control is used for active damping of a flex-
ible space structure as in (Fei and Fang, 2006). With
this technique, the structural velocity coordinate is fed
back to the compensator while the compensator posi-
tion coordinate multiplied by a negative gain is fed
ActiveVibrationControlofaSuperElementModelofaThin-walledStructure
661
0 5 10 15 20 25
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Frequency (Hz)
Amplitude (mm)
No control
PPF control
Figure 7: The FFT spectrum of the smart beam.
back to the structure. SRF has a wider active damp-
ing region and it can stabilize more than one mode if
given a sufficient bandwidth.
The SRF model is presented as
¨
ξ + 2ζ
˙
ξ + ω
2
ξ = − Gω
2
η (16)
¨
η + 2ζ
c
ω
c
˙
η + ω
c
η = ωc
2
˙
ξ (17)
Similar to what has been done during the design of
the PPF controller, it’s also supposed that
ζ = ζ
c
(18)
ω
c
= ω (19)
To validate this supposition, the structure motion at
the steady state for a single DOF system can have the
form
ξ(t) = αe
iωt
(20)
and the output of compesator at steady state will be
η = βe
i(ω+
π
2
− φ)
(21)
where
φ = tan
−1
2ζ
c
(
ω
ω
c
)
(1−
ω
2
ω
2
c
)
!
(22)
And magnitude β is given by
β =
α
s
(1−
ω
2
ω
2
c
)
2
+ (2ζ
c
ω
ω
c
)
2
(23)
When ω = ω
c
⇒
ω
ω
c
= 1, then ϕ =
π
2
⇒
¨
ξ+ 2ζω
˙
ξ+ (ω
2
+ Gβω
2
)ξ = 0 (24)
In this case, there will be an increase in the stiffness
of the structure (active stiffness). Moreover, the sta-
bility condition is not clearly defined due to the fact
that the closed-loop damping and stiffness matrices of
the whole system cannot be symmetrized (Newman,
1992). The SRF controller has shown to be very ef-
fective in damping the first eigenmode of the smart
beam. This is shwon in (Figure 8) and (Figure 9).
20 22 24 26 28 30 32 34 36 38 40
−0.04
−0.03
−0.02
−0.01
0.00
0.01
0.02
0.03
0.04
Time (s)
Tip displacement (m)
No control
SRF control
Figure 8: Tip displacement vs. time with and without con-
trol.
0 5 10 15 20 25
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Frequency (Hz)
Amplitude (mm)
No control
SRF control
Figure 9: The FFT spectrum of the smart beam.
4.3 Comparison of Results of
Controllers
Comparing the results of the PPF and SRF con-
trollers, together with the Lyapunov stability control
strategy from (Ghareeb and Schmidt, 2012), some im-
portant facts were noticed. Firstly, the SE technique
has proved its efficiency by demanding low effort and
small computation time. Secondly, it was concluded
that the PPF controller needed much less time to sta-
bilize the system, in comparison to the other con-
trollers. This is shown in Figure 10 and Figure 11.
Thus, when the PPF controller was implemented,
it took about 0.8 seconds to stabilize the tip dis-
placement, while with other controllers it took about
2 seconds.
The SRF and Lyapunov control strategies pro-
duced similar results. This is due to the fact that in
both controllers, the velocity was the input parameter
to the system.
The effectiveness of the PPF is shown also in Fig-
ure 12 where the amplitude of the resonance of the
first natural frequency is highly reduced in compari-
son to the other control strategies.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
662
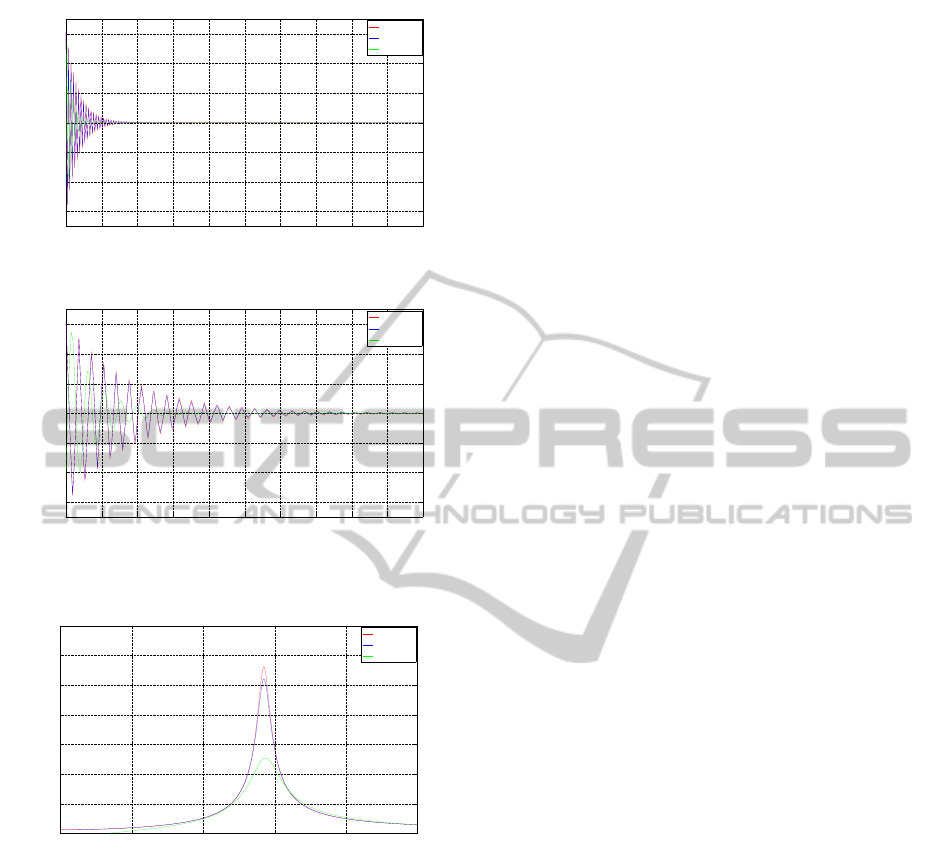
20 21 22 23 24 25 26 27 28 29 30
−0.03
−0.02
−0.01
0.00
0.01
0.02
0.03
Time (s)
Tip displacement (m)
Lyapunov
SRF
PPF
Figure 10: Tip displacement vs. time (SE model).
20 20.2 20.4 20.6 20.8 21 21.2 21.4 21.6 21.8 22
−0.03
−0.02
−0.01
0.00
0.01
0.02
0.03
Time (s)
Tip displacement (m)
Lyapunov
SRF
PPF
Figure 11: Tip displacement vs. time in a zoomed region of
Figure 10.
0 5 10 15 20 25
1
2
3
4
5
6
7
× 10
−3
Frequency (Hz)
Amplitude (mm)
Lyapunov
SRF
PPF
Figure 12: The FFT spectrum of the smart beam.
5 CONCLUSIONS
In this work, the basic procedures for the modeling
and simulation of a smart beam were presented. At
the beginning, the relation between actuator velocity
and actuator moment was derived. A FE model was
created and the damping coefficients were calculated.
A SE model was then deduced from the FE model.
Different linear controllers were designed and imple-
mented on the SE to control the free body vibrations
of the cantilevered beam which was excited by its first
eigenmode. The controllers proved to be very effec-
tive and the results were shown and compared. In the
future, other types of controllers will be designed and
implemented. Nevertheless, more eigenmodes will be
controlled and the possibility to implement the con-
trollers experimentally will be checked.
REFERENCES
Adhikari, S. and Woodhouse, J. (2001). Identification of
damping: Part 1, viscous damping. Journal of Sound
and Vibration, 243, no.1:43–61.
Alipour, A. and Zareian, F. (2008). Study rayleigh damp-
ing in structures; uncertainties and treatments. In The
14
th
World Conference on Earthquake Engineering,
Beijing, China.
Allik, H. and Hughes, T. (1970). Finite element method
for piezoelectric vibration. International Journal for
Numerical Methods in Engineering, 2:151–157.
Bailey, T. (1984). Distributed-parameter vibration con-
trol of a cantilever beam using a distributed-parameter
actuator. Master’s thesis, Massachusetts Institute of
Technology.
Bailey, T. and Jr., J. H. (1985). Distributed piezoelectric-
polymer active vibration control of a cantilever beam.
AIAA Journal of Guidance and Control, 6, no.5:605–
611.
Block, J. and Strganan, T. (1998). Applied active control for
a nonlinear aeroelastic structure. Journal of Guidance,
Control, and Dynamics, 21, no.6:838–845.
Craig, R. and Bampton, M. (1968). Coupling of sub-
structures for dynamic analyses. AIAA Journal, 6,
no.7:1313–1319.
Crawley, E. and Anderson, E. (1990). Detailed models of
piezoceramic actuation of beams. Journal of Intelli-
gent Material Systems and Structures, 1, no.1:4–24.
Crawley, E. F. and de Luis, J. (1987). Use of piezoelectric
actuators as elements of intelligent structures. AIAA
Journal, 25, no.10:1373–1385.
Fanson, J. and Caughey, T. (1990). Positive position feed-
back control for large space structures. AIAA Journal,
28, no.4:717–724.
Fanson, J. and Chen, J. (1986). Structural control by the
use of piezoelectric active members. Proceedings
of NASA/DOD Control-Structures Interaction Confer-
ence, NASA CP-2447, 2:809–830.
Fei, J. and Fang, Y. (2006). Active feedback vibration sup-
pression of a flexible steel cantilever beam using smart
materials. Proceedings of the First International Con-
ference on Innovative Computing, Information and
Control (ICICIC’06).
Gawronski, W. (2004). Advanced Structural Dynamics and
Active Control of Structures. Springer.
Ghareeb, N. (2013). Design and Implementation of Linear
Controllers for the Active Control of Reduced Models
of Thin-Walled Structures. PhD thesis, RWTH Aachen
University of Technology.
Ghareeb, N. and Radovcic, Y. (August 2009). Fatigue anal-
ysis of a wind turbine power train. DEWI magazin,
35:12–16.
ActiveVibrationControlofaSuperElementModelofaThin-walledStructure
663

Ghareeb, N. and Schmidt, R. (2012). Modeling and active
vibration control of a smart structure. In Proceedings
of the 9th International Conference on Informatics in
Control, Automation and Robotics (ICINCO 2012),
volume 1, pages 142–147, Rome.
Goh, C. and Caughey, T. (1985). On the stability problem
caused by finite actuator dynamics in the collocated
control of large space structures , 1985, vol. 41, no.
3, pp. 787-802. International Journal of Control, 41,
no.3:787–802.
Moheimani, S. and Fleming, A. (2006). Piezoelectric
Transducers for Vibration Control and Damping.
Springer.
Newman, S. (1992). Active damping control of a flexible
space structure using piezoelectric sensors and actua-
tors. Master’s thesis, U.S. Naval Postgraduate School,
CA.
Piefort, V. (2001). Finite Element Modelling of Piezoelec-
tric Active Structures. PhD thesis, Universit Libre de
Bruxelles, Belgium.
Varadan, V., Lim, Y., and Varadan, V. (1996). Closed
loop finite-element modeling of active/passive damp-
ing in structural vibration control. Smart Materials
and Structures, 5, no.5:685–694.
Waghulde, K., Sinha, B., Patil, M., and Mishra, S. (2010).
Vibration control of cantilever smart beam by us-
ing piezoelectric actuators and sensors. International
Journal of Engineering and Technology, 2, no.4:259–
262.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
664
