
Online Knapsack Problem with Items Delay
Hajer Ben-Romdhane
1
and Saoussen Krichen
1,2
1
LARODEC Laboratory, ISG of Tunis, 41 Rue de la Libert´e, Le Bardo, Tunisia
2
FSJEG de Jendouba, Avenue de l’U.M.A, 8189 Jendouba, Tunisia
Keywords:
Online Optimization, Dynamic Programming, Knapsack problems, Optimal Stopping Problems.
Abstract:
We address in this paper a special case of the online knapsack problem (OKP) that considers a number of
items arriving sequentially over time without any prior information about their features. As items features are
not known in advance but revealed at their arrival, we allow the decision maker to delay his decision about
incoming items (to select the current item or reject it) until observing the next ones. The main objective
in this problem is to load the best subset of items that maximizes the expected value of the total reward
without exceeding the knapsack capacity. The selection process can be stopped before observing all items
if the capacity constraint is exhausted. To solve this problem, we propose an exact solution approach that
decomposes the original problem dynamically and incorporates a stopping rule in order to decide whether to
load or not each new incoming item. We illustrate the proposed approach by numerical experimentations and
compare the obtained results for different utility functions using performance measures. We discuss thereafter
the effect of the decision maker’s utility function and his readiness to take risks over the final solution.
1 INTRODUCTION
Online optimization problems model a large range of
real-world situations where the problem inputs are
revealed over time (Mahdian et al., 2012). In such
problems, the final decision is made up of many sub-
choices that are taken before all data become avail-
able. For instance, in the problem of hiring em-
ployees, candidates applying for the position arrive
sequentially and are interviewed one by one. The
employer is required to make an irrevocable deci-
sion about each interviewed candidate before receiv-
ing the next ones, and while knowing nothing about
their competency. Practical applications of online
optimization problems arise in (but not limited to):
dynamic resource allocation, inventory management,
machine scheduling, and auctions. These problems
require algorithms that make the decision in an online
fashion for many considerations, among which: the
importance of real-time decision making (e.g., many
requests may become unavailable after some time, the
value of a given offer may decrease by time, or ad-
ditional costs may be incurred), and waiting that all
data become available is costly (in terms of time and
in terms of loss of good opportunities). An “online al-
gorithm” is an algorithm that must make the decision
sequentially over time based only on the previously
served requests and with partial or imperfect knowl-
edge about the potential ones (Albers, 2003).
In this article, we are particularly concerned with
the knapsack problem (KP), one of the most widely
and extensively studied combinatorial optimization
problems that knew several variations and extensions
over years. In its static version (0-1KP), we are given
a number of items from which we are required to se-
lect a subset to be carried into a knapsack of a lim-
ited capacity. Items differ from each other by their
rewards and their weights. The problem is to load
the subset of items which maximizes the total reward
of the knapsack contents without exceeding its ca-
pacity. This variant of the KP supposes the simul-
taneous availability of all items as well as a com-
plete knowledge about their features (weight and re-
ward). However, many real-world applications of
the KP involve receiving items in an online man-
ner (Kleywegt and Papastavrou, 1998)(Babaioffet al.,
2007). This includes web advertising, selling real-
estate, and auctions (Zhou et al., 2008). Accordingly,
the online knapsack problem (OKP) was introduced
in (Marchetti-Spaccamela and Vercellis, 1995), and
investigated since then in several studies. In (Iwama
and Taketomi, 2002), it was shown that the OKP is
inapproximable and that a relaxation (e.g. to assume
that items are removable, or to allow resource aug-
213
Ben-Romdhane H. and Krichen S..
Online Knapsack Problem with Items Delay.
DOI: 10.5220/0004832702130220
In Proceedings of the 3rd International Conference on Operations Research and Enterprise Systems (ICORES-2014), pages 213-220
ISBN: 978-989-758-017-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

mentation) is needed to approach the optimal solution
within a constant ratio.
This work introduces a new relaxed version of the
OKP that allows the delay of arriving items. We de-
fine the delay of an item as being the defer of the de-
cision about that item until observing the next one(s).
That is, an item i received at t will still available for
the selection in subsequent stages until it is loaded in
the knapsack (at any stage g >= t) or the decision pro-
cess ends (when all the potential items are received).
Indeed, the OKP with delay is a more fair model of
many real world scenarios where the revealed offers
still available until a given deadline after which they
are loosened. Therefore, discarding these offers early
from the selection process may proveregrettable if the
subsequent offers are less desirable. We note that the
delay of offers in online optimization problems has
been considered previously in the literature, namely
with the optimal stopping problem (Kramer, 2010).
Accordingly, we define the OKP with delay as
follows. A decision maker (DM) is receiving a set
of items sequentially, one at a time and in a random
order. He is allowed to select immediately the cur-
rent item or defer his decision about the item to next
stages. The decision about each item depends mainly
on the already observed items and on the utility of
the current item for the DM. If the DM chooses to
delay one (or more) item, it will be considered in the
next stage but it incurs a penalty in terms of utility (by
decreasing its utility). This penalization was consid-
ered mainly in order to urge the DM to load the items
that he believes to be desirable as soon as possible be-
cause every time they are delayed, they lose of their
utility. The selection process ends if all the poten-
tial items are received, or when the knapsack is full.
The main dilemma in this problem consists in decid-
ing the best moments to select items given that the de-
cision of loading an item is irrevocable. The OKP can
hence be viewed as a constrained multiple choice op-
timal stopping problem (Babaioff et al., 2007) where
a DM is required to select the best offers of the se-
quence of offers arriving over time. The stopping rule
in optimal stopping problems consists in stopping the
process when the DM believes that the current offer is
the best of the sequence. This is translated in the OKP
by stopping at the items that are expected to be the
more desirable of the sequence, so to load them in the
knapsack. For more details about the optimal stop-
ping problem and its dynamic formulation, the reader
is referred to (Gilbert and Mosteller, 2006).
Therefore, we propose to makeuse of the dynamic
equations of the optimal stopping problemto solve the
OKP with delay. We developa dynamic programming
strategy managed by a stopping rule. The proposed
approach build-up the solution gradually through sub-
decisions made at each stage. The selection rule con-
sists in computing the expected utilities of each of the
already received items based on the DM’s utility func-
tion. The utility of a given item depends on its rank
among all potential items. We assume, without loss
of generality, that ranks are awarded according to the
items density (the value of an item per unit weight).
The expected utilities values help the DM to de-
cide whether it is wise to select one (or more) of the
available offers, or to wait for better items that may
appear in next stages. If at a given stage more than
one item are chosen and that the sum of their weights
exceeds the remaining capacity in the knapsack, these
items are subjected to a 0-1KP to select the best ones
to be loaded in the knapsack. These steps allows the
DM to decide which items to load at each stage and
which ones to delay. Our approach is run on a large
test bed of OKPs with sizes belonging in {10,1000}.
We also develop some metrics to show the effective-
ness of our approach, based on a comparison of the
amount of items loaded during the dynamic process.
The present paper is organized as follows. Sec-
tion 2 focuses on a review of the relevant literature
surrounding the topic. Section 3 deals with the prob-
lem description and the mathematical formulation of
the model. Section 4 presents the solution approach
and draws the corresponding algorithm. We illustrate
our approach by an experimental study in Section 5.
Our concluding remarks follow in the last section.
2 RELATED LITERATURE
The first online version of the KP was studied by
(Marchetti-Spaccamela and Vercellis, 1995) where it
is assumed that items arrive online, one by one, and
with no information a priori. Each item can either be
loaded or discarded on arrival, and discarded items
become unavailable in the next stages. In that work, a
linear time dynamic algorithm was proposed to ap-
proximate the optimal solution. In (Lueker, 1995)
the algorithm of (Marchetti-Spaccamela and Vercel-
lis, 1995) was improved by reducing the difference
between the optimum and the approximate solution.
Several studies were concerned with the remov-
able OKP, in which loaded items can be removedfrom
the knapsack to place other ones (Iwama and Zhang,
2010). The removability assumption was made to
reach a competitive algorithm for the OKP since the
original problem is inapproximable (Iwama and Take-
tomi, 2002). In (Han and Makino, 2009), a fractional
version of the OKP was investigated and a greedy on-
line algorithm was presented to solve the problem.
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
214

The OKP was identically studied for auctions, where
a limited budget buyer would like to purchase items
from a given set of bids. In (Aggarwal and Hartline,
2006), the authors studied the knapsack auction prob-
lem for advertising in web page and broadcast band-
width, and proposed a constant factor approximation
for the unlimited capacity knapsack. Stochastic vari-
ants of the OKP were also studied in (Papastavrou and
Kleywegt, 2001).
In relation with the studied problem, we can not
ignore the study of (Babaioff et al., 2007) which in-
vestigated a weighted form of the secretary prob-
lem (a special case of the optimal stopping problem).
Indeed, the OKP can be seen as multiple-choice sec-
retary problem if all items weight are set to 1 and
the knapsack capacity is k. A 10e-competitive algo-
rithm was proposed for arbitrary weights and an e-
competitive algorithm for the particular case where
items have equal weights.
Recently, the OKP was considered with a differ-
ent selection rule where two DMs are involved and
the decision is built-up in a number of rounds. Each
round, the two DMs are required to select one item
from their individual sets, and the winner item is filled
in the knapsack (Marini et al., 2013).
3 PROBLEM STATEMENT
We consider a DM observing a sequence of items, one
at a time, in order to select the best ones to be filled in
his limited capacity knapsack. More formally, let us
assume that items arrive over n discrete periods (the
period n corresponds to the deadline) and that exactly
one item appears at each period. Each item has a spe-
cific weight as well as a certain reward which remain
unknown until the item is received. Once arrived, an
item is evaluated and its importance is measured with
regards to those already observed in previous stages.
The decision to select the item or to reject it can be
made instantly or delayed to next stages. If an item is
selected, it cannot be taken out of the knapsack. How-
ever, a rejected item can be re-examined and loaded at
a subsequent stage. This last assumption was consid-
ered to prevent making a wrong choice by discarding
items -that may reveal later good- early from the se-
lection process. The DM stops receiving more items
if one of the following criteria is met: the knapsack
if full, or item n is already observed. The DM aims
to find the optimal subset of items that maximizes his
profit without exceeding the knapsack capacity.
3.1 Notations
We adhere to the following notations in this paper:
• n: the total number of potential items
• C: the knapsack weight capacity
• i: item’s number (refers to the i
th
received item)
• j: stage’s number (i.e. j items were so far revealed)
• v
i
: value (or reward) of item i
• w
i
: weight of item i
• d
i
: density of i. It is given by d
i
=
v
i
w
i
• c
j
: the remaining capacity of the knapsack at j
• r: the relative rank of the current item
• k: the absolute rank
• U
i
(k, j): the utility function of item i at j
• EU
i∗
( j, r): the expected utility of the item i
• EU
i
s
( j, r): the expected utility when accepting i
• EU
i
c
( j): the expected utility when delaying i
• P(k|r, j): the probability of having k given r at j
• S: the set of candidate items
3.2 Dynamic Formulation of the OKP
with Delay
We are given n items arriving online, one at a time,
and a knapsack of capacity C. Each item i is char-
acterized by two positive values, a weight w
i
and a
reward v
i
, which still unknown until the item appears.
The problem asks to fill the knapsack, in an online
fashion, in such a way to maximize the value of its
contents while respecting the capacity limit.
As previously mentioned, the OKP has several
similarities with the optimal stopping problem, in
which an agent is receiving a number of offers over
time in order to select the best one. Taking into ac-
count these resemblances, we develop our dynamic
formulation using the dynamic equations of the op-
timal stopping problem as a base. The problem can
be viewed as a decision process aiming to identify the
fittest offers of the sequence of offers arriving succes-
sively. Each new stage, the DM ranks the available
items (the one received at the current stage and the
delayed ones). Each item is attributed a relative rank
r, which indicates its desirability among the so far re-
ceived items (but not among all potential items). The
absolute rank of an item i, is its rank among the n
items. As no prior information is available, the abso-
lute rank (k) of an item can only be determined when
all the items are received. Based on these ranks, the
DM decides to select or to delay each available item.
Our decision strategy is based on four compo-
nents: the utility function, the expected utility of a
OnlineKnapsackProblemwithItemsDelay
215
given item, its expected utility when stopping (when
selecting it), and its expected utility when continu-
ing (when delaying it). Each stage, two steps are per-
formed: computing the expected utilities of the avail-
able items, and solving a 0-1KP.
Computing the expected Utilities. The DM’s utility
is a measure of its desirability of the consequences
to which can lead his decision. In our case, U
i
(k, j)
denotes the DM’s utility of selecting item i whose ab-
solute rank is equal to k at the j
th
stage. The utility is
a non-increasing function of the absolute rank.
As we are looking for the best subset of items to be
packed in the knapsack, we adopted a utility function
which attributes decreasing values in terms of the ab-
solute rank. Besides, a penalty of delay is incurred by
delayed items. Therefore, our utility function is ex-
pressed in terms of the absolute rank and the stage’s
number: U
i
= f(k, j). We assume that the utility of
a delayed item is discounted to the utility of the next
rank each time the item is delayed. In this work, two
different utility functions are considered in order to
study their influence on the final decision: the inverse-
rank utilityU
i
1
(k, j), and the regressive fraction utility
U
i
2
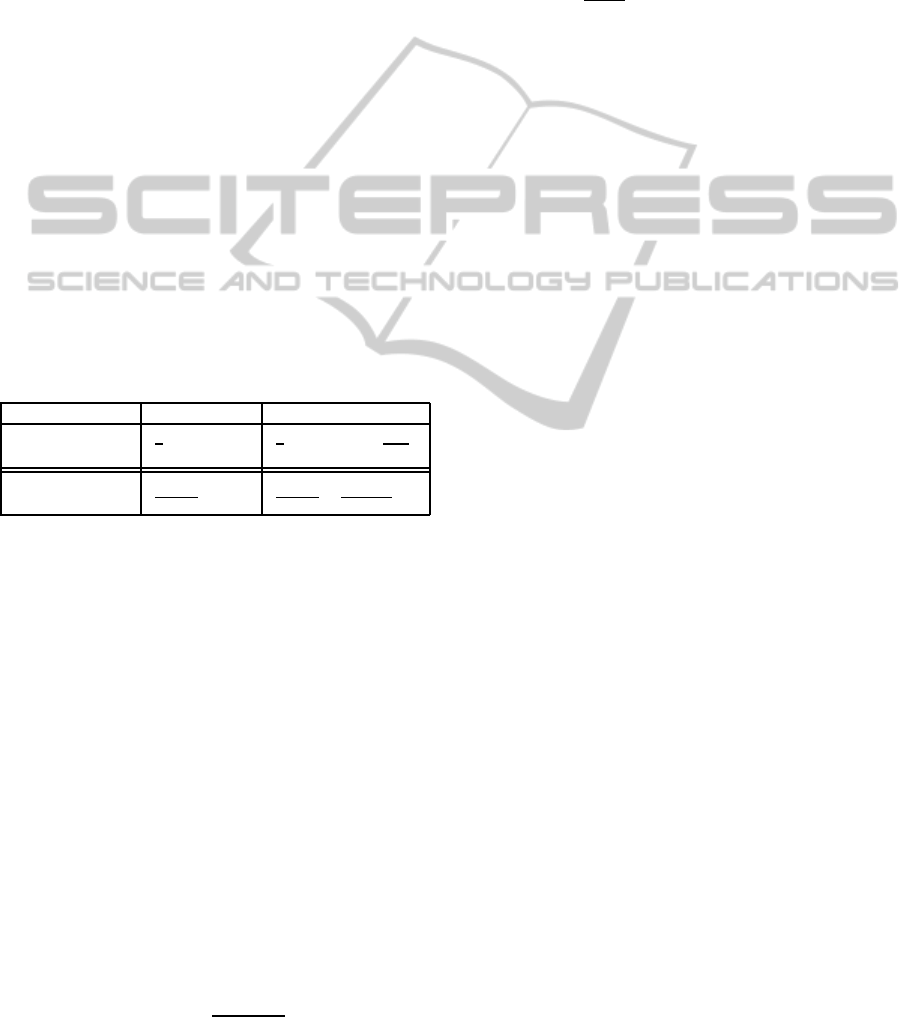
(k, j). Table 1 reports their mathematical formulas
for delayed and non-delayed items.
Table 1: Utility functions formulas
Utility function non-delayed delayed
U
i
1
(k, j)
1
k
1
k
×
∏
j−i
p=1
(1−
1
k+p
)
U
i
2
(k, j)
n−k+1
n
n−k+1
n
×
n−( j−i)
n
As the decision about a given item i is between
two alternatives (to select the item or to delay it), it
is reasonable to consider the expected utility of each
alternative as base to make the decision. We denote
by EU
i
s
( j, r) the expected utility of selecting item i at
j with a relative rank r. The expected utility when
continuing, denoted by EU
i
c
( j), is the expected utility
of delaying item i at j andcontinuing to the next stage.
The decision at any stage of the selection pro-
cess depends on the values of these two components,
and the DM will react in accordance with the deci-
sion that maximizes his expected utility. That is, if
EU
i
s
( j, r) ≥ EU
i
c
( j), item i will be considered as a
candidate at j, otherwise it is delayed to next stages.
Therefore, the expected utility of i can be stated as:
EU
i
( j, r) = max[EU
i
s
( j, r), EU
i
c
( j)] (1)
where the expected utility of selecting i is given by:
EU
i
s
( j, r) =
∑
n− j+r
k=r
U
i
(k, j) f(k|r, j),
where f(k|r, j) =
(
k−1
r−1
)(
n−k
j−r
)
(
n
j
)
(2)
The expected utility of selecting an item is computed
as the sum of the probability of each of the possible
absolute ranks (k ∈ {r, ..., n− j + r}) weighted by its
corresponding utility. However, the expected utility
when continuing with delaying item i at j, is com-
puted as the average sum of the expected utilities of
item i until stage j + 1, and this to measure the effect
of delaying i for the next stage. It can be written as:
EU
i
c
( j) =
1
j + 1
j+1
∑
r=1
EU
i
( j+ 1, r) if j < n (3)
Equation (3) indicates furthermore that at the last
stage (j = n), no item can be delayed anymore and all
the available items are nominated for the selection.
Thereby, the DM can identify which items to de-
lay and the ones to be inserted in the knapsack (by
means of equation (1). However, if the the knapsack
cannot carry all items considered for the selection,
then only the best ones will be filled in the knapsack.
We denote by S the subset of items verifying the in-
equality EU
i
s
( j, r) ≥ EU
i
c
( j) at j, hence it is the sub-
set of candidates for selection. To insure selecting the
best of all items in S, we solve a 0-1KP having as in-
puts the set of items S and as capacity constraint the
remaining capacity at j.
Solving a 0-1 Knapsack Subproblem. The knapsack
subproblem at stage j (KP
j
) can be stated as:
Maximize Z(x) =
∑
i∈S
v
i
x
i
Subject to
∑
i∈S
w
i
x
i
≤ c
j
(4)
The solution of KP
j
is the subset of items to be
loaded in the knapsack at stage j. Hence, at any stage
j (j ∈ [1, n]), the knapsack will contain items inserted
during the previous j − 1 stages in addition to the
items selected at j.
4 THE PROPOSED SOLUTION
APPROACH
We propose an online algorithm based on dynamic
programming decision rules to solve the OKP with
delay. In a first part of this section, we present the
proposed approach and we draw up the pseudocode.
The second subsection details the solution steps of a
small size problem for demonstration purpose.
4.1 The Algorithm
We note that our algorithm iterates a number lower or
equal to the total number of items n. Each stage, two
fundamental steps are performed:
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
216
1. First Selection: identifies the set of candidates
based on the values of their expected utilities.
2. Second Selection: candidates items undergo a
second selection via a 0-1 knapsack subproblem
to select the best among them. This second selec-
tion is only required when the remaining capacity
cannot accommodate all candidates.
The algorithm is given as inputs the total number
of items and the knapsack capacity. Items are revealed
then one per stage. When a new item is received, the
algorithm proceeds to the ranking of available items
by density. Available items at the current stage are
those delayed from previous stages and the one re-
ceived at the current stage. The expected utilities of
the available items are computed thereafter based on
the attributed ranks and the candidate items are iden-
tified. If the sum of the weights of candidate items
exceeds the remaining capacity, the algorithm makes
appeal to the KP
j
to select items to be loaded at j.
Items appearing in the solution of KP
j
are filled in
the knapsack and the remaining ones (in the set S)
are discarded definitively. Then, the capacity of the
knapsack is updated and the algorithm reiterates un-
til the capacity is exhausted or when all the expected
items are received. The pseudo-code of the proposed
approach follows.
Begin
While(j <= n)
{ Rank the observed items from 1 to j;
While(i <= j)
{ Compute the expected utilities of item i;
If(EUs{i} >= EUc{i})
{ S U i; // S is the set of candidates}
i:= i+1; }
W:= Sum of weights of items in S;
if(c_j <= W)
{ Load all items in S; }
else
{ Solve (KP_j(S, c_j));
Load the selected items;
Update(c_j); }
If(c_j = 0) // The knapsack is full
{ Quit the procedure; }
else { j:=j+1;}
End.
4.2 An Illustrative Example
In order to help the reader better understand our ap-
proach, we detail the solution steps through a small
sized problem. we consider a knapsack of capac-
ity C = 40, and a set of items with the following
values and weights: v
i
={100,150,120,200,250} and
w
i
={9,10,7,13,25}, where i ∈ {1,2,3,4,5}.
These values are provided to the algorithm as soon
as the item in question becomes available (i.e, at stage
j, the features of item j becomes known). We note
that in this example we compute the expected utili-
ties using the utility function U
i
1
(see Table 1). The
algorithm begins by computing the expected utilities
of the 5 items, each at its arrival stage, for all possible
ranks. The expected utilities values can be seen in Ta-
ble 2. This table shows the EU
i
s
( j, r) and EU
i
c
( j), for
all i ∈ {1, 5}, where j = i and r ≤ j. Cells of the table
present the computed values according to the follow-
ing notation: (EU
i
s
( j, r);EU
i
c
( j)).
Table 2: Expected utilities for n = 5.
Stages
r 5 4 3 2 1
1 (1.00;0) (0.90;0.46) (0.78;0.57) (0.64;0.63) (0.46;0.64)
2 (0.50;0) (0.43;0.46) (0.36;0.57) (0.27;0.63)
3 (0.33;0) (0.28;0.46) (0.23;0.57)
4 (0.25;0) (0.21;0.46)
5 (0.20;0)
Based on these values, we decide on the loading
or the delay of each item at its arrival stage. In what
follows, we analyze stage by stage the solution.
Stage 1: Item O
1
appears. We can read from Ta-
ble 2: item O
1
appears in the process at the first stage,
its EU
1
c
is greater than its EU
1
s
. The decision will
be then to continue to the next stage without packing
it (so it is delayed to next stages).
Stage 2: O
2
becomes available in addition to O
1
.
Their expected utilities are:
EU
1
s
(2, r = 2)=0.21 and EU
1
c
=0.63.
EU
2
s
(2, r = 1)=0.27 and EU
2
c
=0.63.
We can see that the EU
s
of O
2
is greater than its EU
c
so it is a candidate for the selection, while O
1
is not.
As the knapsack is empty and O
2
at this step is the
only candidate, we can load O
2
without going through
the solution of KP
2
. Therefore, the knapsack contains
at the end of the second stage O
2
and the remaining
capacity in the knapsack is c
2
= 40− 10 = 30.
Stage 3: Available items are O
1
and O
3
. By com-
puting their expected utilities, we found that O
3
is the
unique candidate. Hence, O
3
is loaded in the knap-
sack and the remaining capacity is c
3
= 27.
Stage 4: Available items at stage 4 are O
1
and O
4
.
Here also O
4
is a candidate, but O
1
is not. As the
remaining capacity in the knapsack is greater than the
weight of item O
4
, we can load it.
Stage 5: In the last stage, all items are already
received. We do not need to compute the expected
utilities since all available items are candidates for
the final selection. As the remaining capacity is not
enough to carry both items, we solve the KP
5
to se-
lect the fittest one. Therefore, the solution will be
to select O
1
. Subsequently, the solution of this on-
line problem is the subset of items: {O
1
, O
2
, O
3
, O
4
}.
OnlineKnapsackProblemwithItemsDelay
217

The accumulated reward is 570 and the remaining ca-
pacity is about 1. Compared to the solution provided
by a branch-and-bound algorithm, we can say that we
reach the optimal solution.
5 COMPUTATIONAL
EXPERIMENTS
We illustrate the proposed approach by an experimen-
tal study. Our algorithm is implemented in java lan-
guage on a Intel Centrino Duo processor and 2GB of
RAM under Microsoft Vista. It is run for several in-
stance sizes ranging in size from 10 to 1000. To the
best of our knowledge, there is no available bench-
mark for the OKP. Therefore, we generate items fea-
tures for each size of the problem randomly and uni-
formly in [1, 1000], and we set the knapsack capac-
ity in each instance to 50% of the sum of all items
weight. In what follows, we analyze the results of our
algorithm based on several performance measures.
5.1 Experimental Results
This section is concerned with the interpretation of
the obtained results. We compare our results to those
provided by a branch-and-bound algorithm (Pisinger,
1995) having as input the static counterpart of the on-
line problem we already solved with our algorithm.
Moreover, we solve each instance with each of the
two utility functions defined previously (U
1
and U
2
).
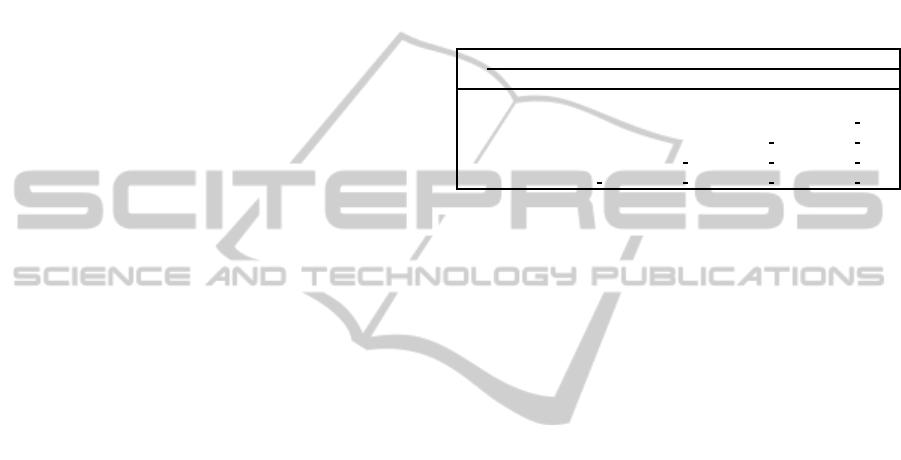
Table 3 reports the results of our algorithm in terms
of different performance measures, which are respec-
tively: the total number of loaded items (NLI), the
average reward (AR), the first loading stage (FLS),
the percentage of loads before the last stage (LBLS),
and the CPU time. From Table 3 we can see that NLI,
AR, and CPU increase proportionally to the problem
size. Besides, NLI and AR values provided by each
of the utility functions are equal. This means that we
reached in all cases the same final solution with both
utility functions. In what follows, we define rest of
performance measures and analyze their results.
5.1.1 The First Loading Stage (FLS)
This measurement indicates at which stage of the pro-
cess the algorithm began to load items. That is, the
stage in which the DM met its first desirable offer.
Figure 1 draws the FLSs with regards to their position
in the selection process. The figure compares FLS
values obtained by each of the utility functions to the
static case (where FLS is the last stage).
100 200 300 400 500 600 700 800 900 1000
30
40
50
60
70
80
90
100
110
Problem size
First loading stage (%)
U
1
U
2
0−1KP
Figure 1: A comparison of FLS values using U
1
and U
2
.
We can see from Table 3 and Figure 1 that FLS
values using the utility functionU
1
are always greater
than those of U
2
(except with instance of size 10).
Therefore, wa can say that the utility function U
2
is
more convenient for DMs who desire to make deci-
sions in a close time horizon, while U
1
is more suit-
able for DMs who desire to delay their decisions until
a considerable number of items appears.
5.1.2 The Percentage of Loads Before the Last
Stage (LBLS)
This performance measures assesses the ability of the
algorithm to select desirable items in an online man-
ner. Indeed, when the final stage is reached the prob-
lem becomes static (all items are already revealed).
Thanks to the dynamic approach, we can begin to load
items as soon as they appear, and we do not need to
wait until all items are received. LBLS is stated as
follows:
LBLS =
NLIBF
NLI
× 100 (5)
where NLIBF and NLI denote respectively: the
number of loaded items before the final stage and the
total number of loaded items. The greater is LBLS,
the more performing the algorithm.
100 200 300 400 500 600 700 800 900 1000
−5
0
5
10
15
20
25
30
35
Problem size
LBLS (%)
U
1
U
2
0−1KP
Figure 2: Comparison of LBLS values using U
1
and U
2
.
Figure 2 reports the LBLS behavior for each of the
used utility functions with regards to the static case.
LBLS values usingU
1
indicate that the final stage still
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
218

of a considerable importance regarding the number of
items selected at it: it monopolizesthe biggest propor-
tion of loads. However, the LBLS is higher using U
2
:
about 25% of items are loaded before the last stage.
We notice that both curves have similar shapes but the
one of U
1
is lowest: this is due to the penalty of de-
lay. Indeed,U
1
penalizes delayed items more severely
than do U
2
.
To conclude, we can say that our algorithm has
proved to be efficient in solving the OKP. Compared
with the results provided in the static case, we reached
almost the same overall profits. Besides to respecting
the capacity constraint, we were able to fill at maxi-
mum the knapsack while making decision in oppor-
tune time. As to the utility functions, we noted that
the utility function U
2
proved to be more convenient
in terms of FLS and LBLS: it gives more interest in
newcomers if compared with U
1
, which prefers to de-
lay as much as possible and makes decision in latest
stages. However, the utility function does not con-
tribute in the overall reward: we reached all the time
the same values using either functions of utility.
The weak point in our algorithm is its high com-
plexity. As it can be seen in Table 3, the CPU time
is very high and increases exponentially as the size of
the problem increases. We think that this should be
given more attention in future works.
6 CONCLUSIONS
In this paper, we proposed a dynamic approach for
the OKP with delay that incorporates a stopping rule
at each stage of the loading process to enable the DM
to select his best items in an online manner. This ap-
proach was adopted to reduce the OKP to a series
of static knapsack subproblems. Using the optimal
stopping terminology, we stated our decision strategy
based on a dynamic formulation. Experimental re-
sults showed that we were able to reach optimal so-
lution using our online approach. Besides, the use of
two different utility functions allowed us to come up
to the desired solution while involving two different
attitudes to risk.
Future works may include improvements of the
present algorithm in order to reduce the CPU time. A
possible generalization of the present work is to study
the OKP with delay while considering the possibility
of losing a number of items during the selection pro-
cess. The other aspect that we would like to explore
in the future is the OKP with multiple DM.
REFERENCES
Aggarwal, G. and Hartline, J. D. (2006). Knapsack auc-
tions. In SODA ’06: Proceedings of the seventeenth
annual ACM-SIAM symposium on Discrete algorithm,
pages 1083–1092. ACM.
Albers, S. (2003). Online algorithms: a survey. Mathemat-
ical Programming, 97(1-2):3–26.
Babaioff, M., Immorlica, N., Kempe, D., and Kleinberg, R.
(2007). A knapsack secretary problem with applica-
tions. In Approximation, Randomization, and Com-
binatorial Optimization. Algorithms and Techniques,
volume 4627 of Lecture Notes in Computer Science,
pages 16–28.
Gilbert, J. and Mosteller, F. (2006). Recognizing the max-
imum of a sequence. In Selected Papers of Freder-
ick Mosteller, Springer Series in Statistics, pages 355–
398.
Han, X. and Makino, K. (2009). Online knapsack problems
with limited cuts. In Algorithms and Computation,
volume 5878 of Lecture Notes in Computer Science,
pages 341–351. Springer Berlin Heidelberg.
Iwama, K. and Taketomi, S. (2002). Removable online
knapsack problems. In Automata, Languages and
Programming, Lecture Notes in Computer Science,
pages 293–305. Springer Berlin Heidelberg.
Iwama, K. and Zhang, G. (2010). Online knapsack with re-
source augmentation. Inf. Process. Lett., pages 1016–
1020.
Kleywegt, A. J. and Papastavrou, J. D. (1998). The dy-
namic and stochastic knapsack problem. Operations
Research, 46:17–35.
Kramer, A. D. I. (2010). Delaying decisions in order to
learn the distribution of options. PhD thesis.
Lueker, G. S. (1995). Average-case analysis of off-line and
on-line knapsack problems. In SODA ’95: Proceed-
ings of the sixth annual ACM-SIAM symposium on
Discrete algorithms, pages 179–188. Society for In-
dustrial and Applied Mathematics.
Mahdian, M., Nazerzadeh, H., and Saberi, A. (2012). On-
line optimization with uncertain information. ACM
Trans. Algorithms, 8:2:1–2:29.
Marchetti-Spaccamela, A. and Vercellis, C. (1995).
Stochastic on-line knapsack problems. Mathematical
Programming, 68:73–104.
Marini, C., Nicosia, G., Pacifici, A., and Pferschy, U.
(2013). Strategies in competing subset selection. An-
nals of Operations Research, 207(1):181–200.
Papastavrou, J. D. and Kleywegt, A. J. (2001). The dynamic
and stochastic knapsack problem with random sized
items. Operations Research, 49:26–41.
Pisinger, D. (1995). An expanding-core algorithm for the
exact 0-1 knapsack problem. European Journal of Op-
erational Research, 87(1):175 – 187.
Zhou, Y., Chakrabarty, D., and Lukose, R. (2008). Budget
constrained bidding in keyword auctions and online
knapsack problems. In Internet and Network Eco-
nomics, volume 5385 of Lecture Notes in Computer
Science, pages 566–576.
OnlineKnapsackProblemwithItemsDelay
219

APPENDIX
Table 3: Comparison of the results provided by the proposed approach in terms of several performance measures.
n NLI AR FLS LBLS (%) CPU
U
1
U
2
U
1
U
2
U
1
U
2
U
1
U
2
Min 5 5 3507 3507 4 4 0.0 0.0 0.0001
10 Avg 6 6 3848 3825 7 7 23.14 33.57 0.0004
Max 7 7 4202 4202 10 10 33.33 66.66 0.0014
Min 30 30 17884 17884 17 14 3.032 21.87 0.001
50 Avg 32 32 20019 20019 28 23 7.38 28.29 0.017
Max 33 33 23202 23202 43 39 12.5 33.33 0.002
Min 60 60 39332 39332 33 31 1.61 18.03 0.003
100 Avg 62 62 41283 41283 68 58 3.72 23.9 0.011
Max 65 65 42311 42311 97 85 6.15 30 0.015
Min 121 121 78016 78016 93 56 0.81 24.0 0.14
200 Avg 124 124 81557 81557 143 93 3.62 26.43 0.15
Max 127 127 84735 84735 198 172 5.78 29.75 0.17
Min 183 184 118636 118636 122 88 0.0 19.78 0.51
300 Avg 190 190 123109 123110 228 169 1.9 24.11 0.74
Max 197 197 127096 127096 300 215 3.14 25.38 0.80
Min 243 243 154889 154889 133 107 0.4 21.82 1.66
400 Avg 251 251 161030 161031 260 142 2.08 24.71 2.24
Max 257 257 166775 166775 373 184 3.57 29.62 2.65
Min 309 308 191223 191223 223 138 0.63 22.72 2.11
500 Avg 314 314 202696 202696 353 268 1.78 24.84 5.08
Max 320 320 214782 214782 496 389 2.57 26.25 9.41
Min 369 369 235853 235853 210 160 1.89 21.72 4.91
600 Avg 374 374 243081 243081 324 267 2.25 24.38 9.08
Max 383 383 249203 249203 585 501 3.39 27.49 13.01
Min 427 427 271964 271964 236 201 1.15 22.95 12.77
700 Avg 436 436 282368 282368 450 320 1.83 25.65 13.95
Max 445 445 296739 296739 678 480 2.76 27.79 17.60
Min 489 489 314685 314685 267 213 1.43 22.49 13.31
800 Avg 501 501 326031 326031 476 402 1.73 24.97 22.05
Max 516 516 332545 332545 787 737 2.13 25.58 29.50
Min 552 552 358579 358579 312 244 0.9 22.82 34.22
900 Avg 563 563 366009 366009 685 605 1.27 24.59 36.93
Max 576 576 369977 369977 894 871 1.73 25.34 40.79
Min 615 615 400685 400685 340 266 0.48 24.06 47.62
1000 Avg 626 626 410631 410631 696 484 1.5 24.78 54.02
Max 639 639 421587 421587 985 809 2.19 27.69 67.44
ICORES2014-InternationalConferenceonOperationsResearchandEnterpriseSystems
220
