
Who is the Hero?
Semi-supervised Person Re-identification in Videos
Umar Iqbal
1
, Igor D. D. Curcio
2
and Moncef Gabbouj
1
1
Department of Signal Processing, Tampere University of Technology, Tampere, Finland
2
Nokia Research Center, Tampere, Finland
Keywords:
Semi-supervised Person Re-identification, Important Person Detection, Face Tracks, Clustering.
Abstract:
Given a crowd-sourced set of videos of a crowded public event, this paper addresses the problem of detecting
and re-identifying all appearances of every individual in the scene. The persons are ranked according to
the frequency of their appearance and the rank of a person is considered as the measure of his/her importance.
Grouping appearances of every person from such videos is a very challenging task. This is due to unavailability
of prior information or training data, large changes in illumination, huge variations in camera viewpoints,
severe occlusions and videos from different photographers. These problems are made tractable by exploiting
a variety of visual and contextual cues i.e., appearance, sensor data and co-occurrence of people. A unified
framework is proposed for efficient person matching across videos followed by their ranking. Experimental
results on two challenging video data sets demonstrate the effectiveness of the proposed algorithm.
1 INTRODUCTION
At public events people usually record videos as a
user generated content, and one of the general prob-
lems of consumers is that they do not know how to
edit the content and find a video sequence that con-
tains the most important person they have been shoot-
ing. The objective of this paper is to analyze the
crowd-sourced videos of a single event to detect im-
portant/mainstream persons appearing in the event.
The importance of an individual is subjective and it
can vary considerably from one person to another.
However, in some cases it can also be generalized
based on some fair assumptions, such as the fact that
in public events people usually capture notable in-
dividuals. For instance, singers/performers in con-
certs, bride/groom during a wedding ceremony, etc.
Hence, these persons happen to appear relatively of-
ten in the data. It can be considered that the person
who is captured by most of the people has high impor-
tance among the majority. For example, videos cap-
tured at an indoor public concert can be seen in Figure
1. By looking thoroughly on the example videos, we
can find occurrences of the same persons in multiple
videos, despite the fact that these videos are captured
by different people.
An automatic detection of such individuals from
multiple videos has a variety of applications that can
Figure 1: Examples of videos captured at the same event
but by different photographers.
easily be realized in multimedia content retrieval, au-
tomatic video remixing, etc. In this work, we refer to
these individuals as “Important Persons”, and all oth-
ers are called “Casual Persons”. The problem posed
here is similar to person re-identification where ap-
pearances of each person across multiple videos are
detected and identified. Subsequently, a method to
rank them according to the amount of occurrence is
needed to finally detect the important persons.
From Figure 1, a large amount of appearance vari-
ation can be seen. To tackle with these challenges, we
aim to utilize multiple visual cues. In addition to tra-
ditional face and clothing color information, we also
exploit the semantic information about the person’s
appearance by detecting several high-level facial at-
tributes (e.g., ethnicity, hair colors, etc.). Contex-
162
Iqbal U., D. D. Curcio I. and Gabbouj M..
Who is the Hero? - Semi-supervised Person Re-identification in Videos.
DOI: 10.5220/0004738801620173
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 162-173
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

tual data obtained from electronic compass is utilized
to analyze the camera movements and ease the pro-
cessing of larger videos. Finally, information about
co-occurrence of individuals is utilized to develop a
semi-supervised Hierarchical Agglomerative Cluster-
ing (HAC) algorithm for grouping the individuals.
The contribution of our work is twofold. First,
a unified framework is proposed: this does not re-
quire any prior information about the individuals. The
framework is completely automatic and does not re-
quire any human intervention. Second, we demon-
strate how usage of multiple visual modalities and
contextual cues can be exploited to enhance the per-
formance of persons matching. Experimental results
on two video data sets demonstrate the effectiveness
of the framework and ensure that the proposed sys-
tem provides competitive results as compared to the
state-of-the-art algorithms.
1.1 Related Work
Recently, an increased amount of research has been
carried out in the direction of person re-identification
and clustering of individuals in videos or images. In
this regard, the closest prior art is that of (Barr et al.,
2011), where the most appearing persons are detected
from the videos recorded in various capturing condi-
tions. First, the face tracks are pre-processed to elimi-
nate outliers followed by the grouping of the same in-
dividuals using HAC. In result, persons appearing in
videos more than a certain threshold are considered as
the most appearing persons. We build upon the sim-
ilar idea and further extend it to incorporate multiple
visual and contextual cues.
The problem of important person detection shares
many common properties with identity specific video
indexing. Recently, (Hao and Kamata, 2012) have
proposed an automatic algorithm for individual re-
trieval from videos. Information about co-occurrence
of individuals is utilized to gather training data, fol-
lowed by the learning of a distance metric to per-
form person matching. (B
¨
auml et al., 2013) utilize
the transcription and subtitles of TV videos to obtain
weakly labeled data and use it along with other con-
textual and visual cues for person re-identification.
Similary, (Cinbis et al., 2011) also learn a self-
supervised similarity metric from face tracks of the
characters appearing in TV-videos. Other works fo-
cusing on similar problems include constraint prop-
agation based unsupervised person re-identification
(Tao and Tan, 2008) and a divide and conquer based
strategy (Gou et al., 2012). However, most of these
works are targeted to TV videos captured by profes-
sional cameramen. Unlike crowd-sourced videos, TV
videos are more structured, and often contain more
close-up scenes. Moreover, a very little variability in
video quality can be found from one episode to an-
other. Hence, person detection and matching is easier
in these scenarios. We, on the other hand, focus on
videos recorded by amateurs with various hand-held
cameras, which implies more challenges as compared
to the aforementioned works. In addition, in case of
crowd-sourced videos, no prior information or subti-
tles can be obtained. Therefore, no training data is
available.
Many photo/video album organization methods
rely on face and clothes information to find similari-
ties in people, as proposed in (Zhang et al., 2003) and
(Sivic et al., 2006). In addition to visual cues, (Suh
and Bederson, 2004) also utilize the time stamp infor-
mation to group images that belong to the same event,
and perform person matching based on clothing color
information. Recently, a very interesting work for the
automatic face association in photo albums has been
proposed by (Lo Presti and La Cascia, 2012) where
an online learning method is employed to group in-
dividuals using face information. However, all these
works are intended for the collection of images and
are not directly applicable to videos.
Furthermore, all previously mentioned works rely
only on face or clothing color information as visual
cues. We, in addition, utilize also the high-level facial
attributes (e.g., gender, age, eye-wears, etc.) as they
provide very strong clues about the appearance of a
person and are proven to be robust against face pose
variation (Kumar et al., 2011). This can help espe-
cially for videos that are captured in a same event.
1.2 Proposed Framework
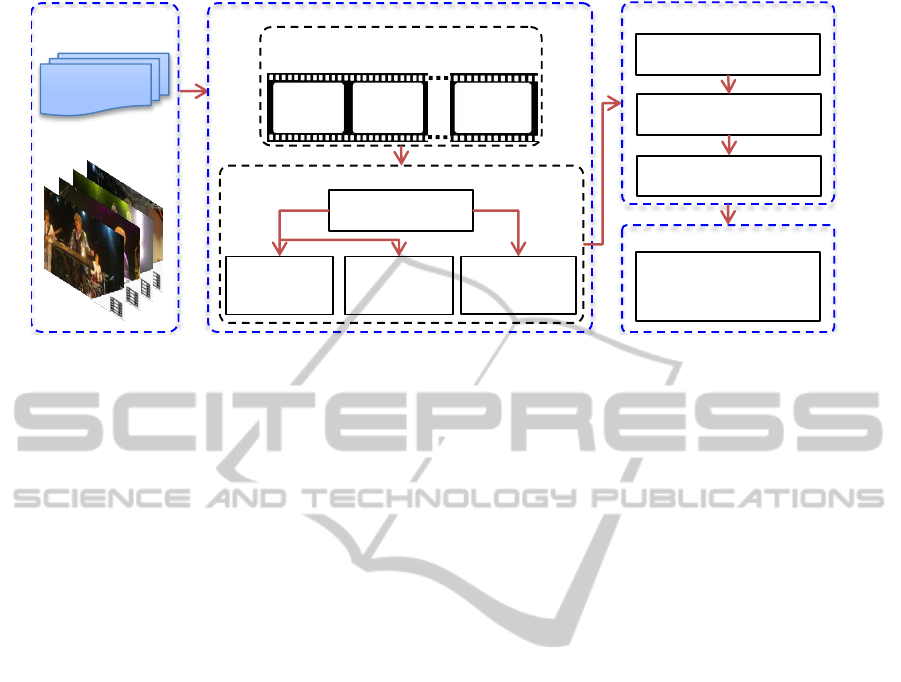
The schematic diagram of the proposed framework is
depicted in Figure 2. The framework is composed
of four processing units. We start with the tempo-
ral video segmentation to divide larger videos, for
which the sensor data is available, into smaller sub-
sequences (Sec. 2.1). The second step represents each
person with three appearance models; facial feature,
clothing color and high-level attributes. First, we ob-
tain face tracks by detecting and tracking faces in con-
secutive frames and subsequently form clothes tracks
by considering a bounding box below every face el-
ement of the face tracks (Sec. 2.2). Afterwards, we
extract useful features for all three appearance models
to be used in the identification process (Sec. 3.1). The
third step utilizes the extracted features to perform
person grouping (Sec.4) and assigns unique identities
to the grouped persons. Finally, in the fourth step,
we rank every individual according to a criterion and
WhoistheHero?-Semi-supervisedPersonRe-identificationinVideos
163
Compass
Data
Videos
Input Data
Person Representation Scheme
Video Segmentation using Compass
Data Analysis
Video
Segment-2
Video
Segment-1
Video
Segment-N
For each video
Face tracks
Extract
Clothing
Features
Extract Low
Level Facial
Features
Extract High
Level Facial
Attributes
Face Detection
and Tracking
Clothes tracks
Unique Identity Assignment
Intra-segment
Clustering
Inter-segment
Clustering
Inter-video Clustering
Important Person Detection
Rank clusters and output
persons represented by
top N Clusters
Figure 2: Schematic diagram of the proposed framework.
output the persons represented by top N clusters as
the most important persons (Sec. 4.3).
2 VIDEO ANALYSIS
We start with the temporal video segmentation to di-
vide the larger videos into smaller sub-sequences that
are then passed to the face tracking algorithm to ob-
tain face and clothes tracks. The rest of this section
explains these steps in detail.
2.1 Temporal Video Segmentation
In addition to tractability of larger videos, this step en-
sures that the clustering within a sub-sequence is ac-
curate and wrong clusters are not propagated into the
next clustering stages. For this purpose, an obvious
choice is to analyze the camera motion and divide the
videos where shot changes are detected. Unlike tradi-
tional techniques that are based on content analysis of
videos and therefore are computationally expensive,
we adopt the sensor based camera panning detection
and classification algorithm proposed by (Cricri et al.,
2012). Their technique utilizes the compass orien-
tations, provided by the built-in electronic compass
available in modern camera devices, to analyze the
horizontal motion of hands and detect the camera pan-
ning. The algorithm is computationally very efficient
and does not require content analysis. Therefore, it is
robust to object movements in videos.
Given the compass orientations (temporally
aligned with the content of the videos) with respect
to magnetic North, first, a low-pass filter is applied
on the raw compass data to eliminate peaks due to
shaky camera movements. Afterward, a first-order
derivative is computed to analyze camera movements.
Peaks that are greater than a certain threshold are
considered as the points where camera panning is
detected. Subsequently, camera panning is classi-
fied as slow or fast based on its speed; gradual
change in compass orientation represents slow pan-
ning, whereas rapid change corresponds to fast cam-
era panning. Slow panning represents that the pho-
tographer is following an object or trying to cover a
panoramic scene, whereas fast panning corresponds
to the photographer’s intention to change the whole
scene. We exploit this observation and divide the
video from all the points where fast panning is de-
tected.
2.2 Face Detection and Tracking
We employ a detector-assisted particle filters based
multi-view face tracking approach, similar to the
work of (Bauml et al., 2010), to exploit the temporal
information in videos. We utilize the readily available
implementation of Local Binary Pattern (LBP) based
face detector of OpenCV (Bradski, 2000) and inte-
grate it into the tracking algorithm as explained next.
We train several face detectors at different pose
angles to detect and track faces under pose variations.
The detectors are trained at the following angles;
θ = {0, ±15, ±30, ±45, ±60} (1)
Five detectors (0, ±30, ±60) are run in parallel over
the entire frame after every k (k = 10) frames. A de-
tection is considered legitimate if at least three detec-
tions are spatially close to each other and far enough
from already known faces. Afterward, we initiate an
independent particle filter, consisting of 1000 parti-
cles, for every detected face to track them in the re-
maining video. The state of each particle consists of
the location (x, y) of the face, size and the yaw angle
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
164

Figure 3: Sample face track generated by the detector as-
sisted face tracker. We can see the variations in appearance
due to changes in facial pose, noise due to motion, and illu-
mination changes.
of the face as follows
x = [x, y, s, α] (2)
The particles are propagated based on a 2
nd
order
auto-regressive process. We compute the weights w
i
of the particles by running a face detector at the re-
gion defined by the state x of every particle. For this
purpose, we chose the detector that has the lowest
angular distance between its pose angle, at which it
is trained, and the particle’s yaw-angle α. This en-
sures that the particles whose pose angles best de-
scribes the current face pose are assigned the higher
weights. As the classifiers used for face detectors
are insensitive to small localization errors, each de-
tector gives multiple overlapping detections around
the face regions. This normally happens because of
running detectors at different scales and multiple lo-
cations within a region. Such overlapping detections
usually appear with fewer consistencies for less confi-
dent face regions or background patches. We use this
assumption and consider the number of such overlap-
ping detections as the weights w of the particles;
D
ρ
= argmax
ρ
(α −ρ), ρ ∈ θ (3)
w = |D
ρ
(x)| (4)
A tracker is terminated when no detection is found
in the regions defined by its particles. Furthermore,
care has to be taken to avoid identity switching of
overlapping tracks that is when particles from differ-
ent trackers come in the vicinity very close to each
other; they may be scored on the same track or be re-
placed with each other. For this purpose, we adopt
a very simple technique such that if the distance be-
tween the centers
X
1
and X
2
of two trackers becomes
less than a certain threshold τ, we terminate one of
these tracks;
kX
1
− X
2
k < τ (5)
The tracks are re-initialized once they become far
enough from each other. This gives us several dis-
joint face tracks for the same individual. An example
of face track can be seen in Figure 3.
2.3 Upper-body Detection
For every face track, we form clothes tracks by de-
tecting the upper-body region utilizing the spatial in-
formation of the face regions. This is done by taking
a bounding box below every face element. Although
body detection in this case is completely dependent
on the face detector, and we are not able to detect per-
sons whose faces are not visible, as in (Sivic et al.,
2006), we use clothing information to aid the identi-
fication process. An independent body detection and
tracking algorithm can be used to enhance the recall
of person detection and the proposed framework can
directly benefit from it. In the rest of this paper, a
combination of face and clothes track will be referred
as person track.
3 APPEARANCE MODELS FOR
PERSON IDENTIFICATION
Once the person tracks are obtained, we represent
each of their elements with three appearance models
as shown in Figure 4.
3.1 Facial Features
It is a well-known fact that images of different iden-
tities in the same pose are more similar compared to
images of the same identity in different poses. De-
spite a face track comprises more than one image of
a person’s face, it is still unsure whether all possible
face poses and expressions are available. Moreover,
faces in a face track are temporally related and con-
tain less appearance variations as compared to face
tracks of the same person but extracted from a differ-
ent video. Hence, to cope with these challenges, we
represent every face track with low-level textural fea-
tures and high-level facial attributes. Low-level fea-
tures help to extract the underlying texture of the per-
son’s face, whereas high-level attributes provide the
semantic information about his/her appearance.
3.1.1 Facial Landmarks Detection and Face
Alignment
Before feature extraction, we align all face regions
such that their eyes and mouth appear at fixed spa-
tial locations. For this purpose, eyes and mouth are
detected using the deformable part models based fa-
cial landmark detector by (U
ˇ
ri
ˇ
c
´
a
ˇ
r et al., 2012) and
its publicly available implementation is used. Align-
ment is done by warping the face image using a 2D
Affine transformation matrix. In addition, under the
WhoistheHero?-Semi-supervisedPersonRe-identificationinVideos
165

Aligned face
Confidence
Scores
Clothes Region
HSV-Color Histogram
f
clothes
(x)
Aligned face
divided into
blocks
f
face
(x)
Concatenated
Histogram
f
attr
(x)
LBP histograms for
each block
Attribute
Classifiers
f
1
f
2
f
16
Asian
White
Black
Indian
Sunglasses
Spectacles
No Eyewear
Wearing Hat
Black Hair
Brown Hair
Blond Hair
Gray Hair
Youth
Beard
Gender
Figure 4: Example of Person Representation by different
appearance models.
assumption of facial symmetry, every face is rotated
to the negative yaw angle, utilizing the pose informa-
tion provided by the face tracker. This little tweak
helps in the identification stage as the features are al-
ways extracted from the good side of the face.
3.1.2 Low-level Facial Features
We first resize every aligned face sample to a fixed
size of 80×80 pixels and convert it to grayscale. Sub-
sequently, we apply LBP operator over the entire im-
age to extract the underlying texture of the face (Aho-
nen et al., 2004). LBP is proven to be robust against
illumination variation and is computationally very ef-
fective. At a given pixel location the LBP opera-
tor is defined by the binary comparisons between the
pixel intensity with the intensities of its P neighboring
points lying on the circumference of a circle defined
by the radius R. For P=8 and R=1, a 59 bin histogram
is often used to represent the frequencies of binary
patterns in a given face image (58 for uniform pat-
terns and 1 for the remaining (Ahonen et al., 2004)).
To include the spatial information, we divide the
image into 4×4 blocks and extract a 59-bin histogram
from each block. A final feature vector, f
f ace
, of
length 944 (4×4×59) is formed by concatenating all
block-wise histograms as depicted in Figure 4.
3.1.3 High-level Attributes
We have selected 15 most evident attributes (Table 1)
Table 1: Selected attributes and 5-fold cross validation ac-
curacies of their classifiers.
Attribute Acc.
(%)
Attribute Acc.
(%)
Asian 81.79 Wearing Hat 97.96
White 86.01 Black Hair 94.45
Black 94.22 Brown Hair 94.04
Indian 88.34 Blond Hair 94.42
Sunglasses 98.05 Gray Hair 96.80
Spectacles 94.84 Gender 95.84
No-Eyewear 94.72 Youth 92.82
Beard 94.10
that cannot vary considerably in an event. However,
more attributes can also be considered, such as in
(Kumar et al., 2011), where 73 attributes are used for
person identification. Our aim is to label every face
element with the confidence values about the pres-
ence of the selected attributes. For this purpose, we
train binary classifiers for each attribute and directly
use the confidence values provided by the classifiers
as the features. To automatically train the attribute
classifiers we adopt the framework proposed by (Ku-
mar et al., 2011) that is briefly explained next.
The classifiers are trained in a supervised manner.
The training samples (500 to 2000 for each attribute)
are gathered from two publicly available datasets;
PubFig (Kumar et al., 2011) and FaceTracer (Kumar
et al., 2008). Images are manually labeled by multi-
ple persons and have been cross-checked once. First,
we align all training samples following the same tech-
nique as described in Sec. 3.1.1. However, in this case
we select a slightly larger face region to keep the hair
and chin visible. Different pixel value types and face
regions can be crucial to efficiently learn a classifier
for a particular attribute. For example, for the attribute
“Eyeglasses”, regions around the eyes are more cru-
cial than the regions like cheeks, hairs, etc. Therefore,
we divide every face region into 13 functional parts
i.e., eyes, nose, forehead, etc. Subsequently, each
face part is converted to various pixel types including
different color spaces (RGB, HSV, and Image Inten-
sity), edge magnitudes and orientations. Furthermore,
the extracted pixel values can be further normalized
for better generalization and robustness to illumina-
tion variations and can also be aggregated in differ-
ent forms, i.e., raw pixel values, histograms and mean
variances. In total, we obtain 585 different combi-
nations of face region, pixel value type, normaliza-
tion and aggregation type. The aim is to select the
best combinations for classification of a particular at-
tribute.
For this, we train Support Vector Machine (SVM)
classifiers with RBF kernel, using LibSVM (Chang
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
166

and Lin, 2011), for each combination and select
the best six combinations using a forward feature
selection algorithm based on their combined cross-
validation accuracy. The parameters C and γ for
SVMs are selected using the grid search. The cross-
validation accuracies of the classifiers are given in
Table 1. For further detail on feature selection and
attribute classifiers, the readers can refer to (Kumar
et al., 2011). A pictorial explanation of the features
extracted using the attribute classifiers can be seen in
Figure 4.
In addition, this is to note that adding high-level
attributes for face representation increase the compu-
tational complexity of the feature extraction module
(slightly more than twice as compared to the combi-
nation of low-level facial and clothing color features).
However, the aim of using them in this paper is to
demonstrate how they can contribute to person identi-
fication, and achieving low computational complexity
is not the main objective here.
3.2 Clothing Color Features
Clothing color information can provide very impor-
tant clues about the appearance of a person, partic-
ularly within a single video, or videos captured at
the same event. We extract 3-dimensional HSV color
histogram from every element of clothes tracks that
are then used to represent the clothing color infor-
mation of the persons. To deal with partial occlu-
sion and avoid background regions, we estimate the
color distribution f
clothes
of the clothes region utiliz-
ing the weighted kernel profile proposed in (Comani-
ciu et al., 2003). The weighting kernel assigns smaller
weights to the pixels farther from the center of the
clothes region, as these pixels are more prone to oc-
clusions and background variations. The color dis-
tribution f
clothes
is defined as follows: Let z
c
be the
center of the clothes region and z
i
be the location (x,
y and z coordinates) of a pixel in this region. The
weighting kernel k, to assign smaller weights to the
pixels farther from the center, is defined as
k(r) =
(
1 −r
2
, if r < 1
0, otherwise
(6)
where r is the normalized distance between the pixel
location z
i
and the region center z
c
. Then the m-bin
weighted color histogram f
u
clothes
, u = 1, ..., m of the
clothes regions centered at z
c
would be
f
u
clothes
= C
n
∑
i=1
k(k
z
c
− z
i
h ×w
k
2
)δ[b(z
i
) −u] (7)
In eq. 7, b : R
3
→ {1, ..., m} is a function that gives
the index, for the pixel at location z
i
, of the bin in the
histogram. The term n gives the total number of pixels
in the clothes region, δ is the Kronecker’s delta, h and
w are the height and width of the region respectively.
C is the normalization factor to ensure that distribu-
tion is legitimate, i.e.,
m
∑
u=1
f
u
clothes
= 1 and is defined
as
C =
1
n
∑
i=1
k(k
z
c
−z
i
h×w
k
2
)
(8)
The weighted color histograms from every clothes el-
ement will be represented as f
clothes
in the rest of this
paper.
4 PERSON TRACK CLUSTERING
We employ a Semi-supervised HAC algorithm to
group the person tracks of the same individuals.
HAC takes a distance matrix and forms a dendro-
gram (tree), where a pair of clusters (person tracks)
is merged at each level. We begin from the leaf node
(each leaf node represents a singleton person track)
and start merging the closest pairs at each level. Fi-
nally, the last level (root node) represents a single
cluster that contains all the person tracks. The lev-
els of the dendrogram represent the distances between
clusters such that the clusters that are near the leaf
nodes are more similar. We perform HAC at three
different steps:
• First, all person tracks within the sub-sequences are
grouped.
• Afterwards, within-video clustering is performed.
In case the video is divided into sub-sequences,
the clusters obtained from all sub-segments are
grouped. If the video is not segmented, clustering
is done for the person tracks from the complete
video.
• In the third stage, clusters originated from all
videos are clustered to globally group the same
individuals.
The distance d between two clusters, C
i
and C
j
, is
calculated as follows:
As a cluster can contain more than one per-
son tracks P
k
, we decompose all person tracks,
within a cluster, and aggregate their elements
into a single set S = {p
1
, p
2
, ..., p
n
}, n =
∑
k
|P
k
|,
∀P
k
∈ C
i
where each element of the set consists
of a face, attribute and clothing color feature vec-
tor. Once the sets S
i
and S
j
are formed for each
cluster, we find N closest pairs of elements from
both sets and form a new set Q of these pairs as
Q = {{a
1
, b
1
}, {a
2
, b
2
}, ...{a
N
, b
N
}}, a ∈ S
i
, b ∈ S
j
.
WhoistheHero?-Semi-supervisedPersonRe-identificationinVideos
167

The mean of the distances between these pairs is
taken as the distance between two clusters as follows:
d(C
i
,C
j
) =
1
N
N
∑
n=1
f (a
n
, b
n
) (9)
where N = min(|S
i
|, |S
j
|) to ensure that the distance
is not biased toward the set with higher length. We
define the distance f (a, b) as the weighted sum of
distances according to each appearance model as fol-
lows;
f (a, b) = d
f ace
∗ w
f ace
+ d
attr
∗ w
attr
+
d
clothes
∗ w
clothes
(10)
where d
f ace
and d
attr
are the distances between facial
and high-level attributes respectively and are taken as
the Euclidean distance between their feature vectors.
d
clothes
is the Bhattacharya distance between clothes
patterns of both elements a
n
and b
n
. The weights
w
f ace
, w
attr
and w
clothes
are the weights assigned to
each model. The discussion on weight selection is
given in Sec. 5.3. To ensure that no modality takes
higher weight than the one assigned to it, we normal-
ize all feature vectors such that their distances range
between 0 and 1.
Once the symmetric distance matrix,
D(i, j) = d(C
i
,C
j
), from the distances between
all clusters is computed, HAC can be performed
with any linkage criterion to develop a dendrogram.
However, by utilizing the uniqueness constraints,
there are possibilities to further enhance the quality
of clustering as described in the next Section.
4.1 Uniqueness Constraints
If two persons appear in overlapping frames, it is sure
that they represent different identities. This little in-
formation is extracted directly from the frame num-
bers of the person tracks, and the distance matrix for
the HAC is slightly changed to enforce these con-
straints. The distance matrix can be seen as a fully
connected graph where each node C
i
is connected to
others C
j
with a weight d(C
i
,C
j
). Our aim is to up-
date the graph such that the distance between all the
persons that appear in overlapping frames is increased
to infinity. For this, we create a new distance matrix
D
0
as
D
0
(i, j) =
max(D) +1, if C
i
∩C
j
6= φ
D(i, j), otherwise
(11)
In D
0
the distance between all overlapping person-
tracks is increased. However, updating it this way re-
sults in the loss of its metricity. Moreover, the triangu-
lar inequality is also violated, and therefore chances
are there that two clusters, with uniqueness constraint
as true, may be clustered due to any other connect-
ing node. To ensure that none of the clusters with
uniqueness constraints be merged, we perform HAC
with complete linkage (Klein et al., 2002). Complete
linkage always considers the maximum distance be-
tween the elements of two clusters, and therefore, en-
forces the uniqueness constraints. Complete linkage
also gives more compact cluster that decreases the
chances of grouping person tracks of different indi-
viduals. The resulting dendrogram is more optimized
and does not cluster co-occurring persons.
We use uniqueness constraints in all three stages
of HAC. First they are used for all the person tracks
which appear in the overlapping frames in a sub-
segment. In the second stage, constraints are used
for all the clusters originating from the same sub-
segment. This ensures that clusters from first clus-
tering level are not merged in the later stages. Subse-
quently, constraints are also used at the last clustering
stage, such that the clusters originating from the same
videos are not merged again.
4.2 Cutoff Selection
A cutoff level has to be selected to achieve the op-
timal clustering. Our goal is to select the optimal
level where the clusters are homogeneous with re-
spect to identity, and are less redundant. For this rea-
son, we select a cutoff level that minimizes the ratio
between intra-cluster distances and inter-cluster dis-
tances. This ensures that the person tracks within
a cluster are closer to each other and are far from
the person tracks in other clusters. To compute the
intra-cluster distance for cluster C
i
we form the set
S
i
= {p
1
, p
2
, ..., p
n
}, as done before. The intra-cluster
distance is then defined as
dist
intra
(C
i
) =
1
∑
n
i=1
i
n
∑
i=1
n
∑
j=i+1
f (p
i
, p
j
) (12)
Inter-cluster distance, dist
inter
, is calculated by taking
the mean of pairwise distances between all clusters at
that level. The distance between a pair of clusters C
i
and C
j
is computed in the same way as done before
in eq. 9. Finally, we select the cutoff level that mini-
mizes the following cost function:
J = β
∑
n
i=1
dist
intra
(C
i
)
dist
inter
+ (1 − β)∗ c (13)
where c is the total number of clusters formed at a
given level, and the constant β defines the trade-off
between clustering accuracy and redundancy. The
larger value of β will result in very compact and accu-
rate clusters but with larger redundancy. On the other
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
168

hand, smaller β will contain less redundant clusters
but with less homogeneity. As the uniqueness con-
straints are used at all stages of clustering, the value
of β should be selected carefully such that no errors
are propagated to the next stages of clustering. If two
person tracks belonging to the same person, within a
sub-segment, are not clustered during the first stage,
then they will not be merged in later stages due to the
uniqueness constraint. The first and second stage of
clustering leverages more benefits from usage of mul-
tiple modalities as the clothing color and attribute fea-
tures would be homogeneous. Therefore, the cluster-
ing can be performed with more confidence in these
stages. Hence, for the first and second stage, we se-
lect a higher value of β, and a slightly lower for the
third stage.
4.3 Global Ranking of Individuals and
Important Person Detection
After the completion of all clustering stages, each
cluster represents a unique individual. To detect im-
portant persons, we rank all individuals based on the
count of sub-sequences from which the person tracks
in a cluster originate. Finally, persons represented by
the first N clusters are taken as important persons and
all others are classified as casual persons. The ex-
perimental results of the complete framework are dis-
cussed in detail in the next section.
5 EXPERIMENTAL RESULTS
We evaluate the performance of the proposed frame-
work, based on four performance metrics, over two
video datasets − a single-event and a multi-event
dataset.
5.1 Performance Metrics
For the evaluation of clustering performance, we use
the same quality metrics as used in (Barr et al.,
2011). This includes Self-Organization Rate (SOR)
and Cluster Conciseness (CON).
SOR gives the information about the homogeneity of
clusters, such that the amount of data samples that are
grouped into correct identity. SOR is described as fol-
lows;
SOR = (1 −
∑
N
AB
+ Ne
N
) (14)
where N
AB
indicates the number of data samples rep-
resenting person-A that are grouped into a cluster
dominated by the samples of person-B. N
e
denotes the
number of person tracks that are assigned to a cluster
in which no person dominates with more than half,
and N represents the total number of person tracks
available for the clustering. Higher value of SOR rep-
resents more homogeneous clusters and higher accu-
racy of clustering.
CON provides the information about redundant
clusters such that if more than one cluster represents
the same person, then all clusters except one are re-
dundant. If person tracks representing person-A show
majority in C
A
clusters, then C
A
− 1 of those clusters
are redundant. The total number of redundant clusters
C
r
is given by
C
r
=
∑
A
C
A
− 1 (15)
and the CON is defined as follows;
CON = (1 −
C
r
C
) (16)
where C is the total number of clusters obtained af-
ter the final stage of clustering. Similar to the SOR,
higher values of CON represent good clustering effi-
ciency.
Since our goal is to detect important persons, it is
possible that an important person is not detected as
important or vice versa. Detection rate of important
persons is captured by False Positive Rate (FPR) and
False Negative Rate (FNR). FPR represents the ratio
of casual persons mis-classified as important. FNR
denotes the ratio of important persons that are missed
by the system (not classified as important). Both FPR
and FNR range from 0 to 1 and the lower value of
both measures shows better detection accuracy.
5.2 Datasets Detail
In order to assess the performance of the proposed
architecture, a dataset containing videos from five
unique crowded events is collected. We refer to this
dataset as single-event dataset in the rest of this paper.
To compare the proposed framework with the state-
of-the-art, we also evaluate it on a publicly available
multi-event dataset, named as ND-QO-Flip, proposed
in (Barr et al., 2011). Both datasets exhibit unique
properties and complexities as described next.
5.2.1 Single-event Dataset
Videos are recorded by different photographers from
different distances, view angles and using various mo-
bile phone cameras (i.e., Nokia Lumia 800, Nokia Lu-
mia 900, Nokia Pureview 808 and Nokia N8). The
length of the videos varies from 1 minute up to 3 min-
utes. The number of videos in a unique event varies
from three to seven. Similarly, the number of persons
appearing in these videos also differs with the event.
WhoistheHero?-Semi-supervisedPersonRe-identificationinVideos
169

Figure 5: Example video frames from single-event dataset, each row representing a unique event.
Figure 6: Example video frames from ND-QO-Flip dataset.
Among the five events, one is recorded in the real
indoor public concert, and all others are simulated
by us. Videos in the public concert are completely
unconstrained and are captured from different view-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
170

points around the stage. In this event, the five band
members appear in almost all videos, whereas the au-
dience varies from video to video. Hence, our aim
is to detect band members as important persons. In
simulated events, three are recorded outdoor in dif-
ferent weather conditions (i.e., sunny, rainy, etc.) and
one is recorded indoor. Few (one to three) of the per-
sons in these videos are considered as important, and
videos are recorded such that important persons ap-
pear in more videos than others. The appearance of
the persons varies across the videos as all photogra-
phers were situated at different locations and view
angles. Furthermore, all crowd members were al-
lowed to make any kind of facial expressions and vary
their facial and body pose. Photographers were al-
lowed to move, zoom & pan the camera but under
the constraint that important persons appear in more
videos. The resolution of the videos is either Full-HD
(1920×1080) or HD (1080×720). Example video
frames from single-event dataset can be seen in Fig-
ure 5.
5.2.2 Multi-event Dataset
The multi-event dataset evaluates the proposed frame-
work in cases when the videos are not recorded in the
same event. In such cases, the situation normally be-
comes even worse as the clothing color, and facial ap-
pearance can vary across the videos. The dataset con-
sists of fourteen 25-59 second videos recorded during
a period of seven months under various weather and
capturing conditions. Unlike our dataset, creators of
the ND-QO-Flip dataset have restricted the facial pose
to near frontal, which reduces the complexity of the
dataset. However, crowd members were allowed to
vary the facial expressions. The dataset contains 90
subjects overall, five of them appeared in more than
one video and all others appeared in a single video.
Hence, for this dataset, the goal is to detect five per-
sons who appear in multiple videos. Example video
frames from single-event dataset can be seen in Fig-
ure 6.
5.3 Weights for Each Appearance
Model
The weights, w
f ace
, w
attr
and w
clothes
, for each modal-
ity in eq. 10 should be assigned differently for each
dataset due to their different nature and complexities.
For the single-event dataset, we assign fixed weights
for all stages of clustering. It is due to the assump-
tion of same clothing of individuals across different
videos. The weights are selected such that the bio-
metrics such as low-level facial features are the most
discriminating features among all modalities. There-
fore, the higher value is taken for w
f ace
. On the other
hand, high-level attributes and clothing colors can be
similar for two different individuals. Hence, we as-
sign a relatively low weight to high-level attributes
and minimum weight to clothing features.
The clothing information in the multi-event
dataset is not the same across different videos. There-
fore, for the last stage of clustering, we eliminate the
clothing color information. For comparison of differ-
ent combinations, we also use the combination of face
and clothing color information. In this case, we assign
a higher value to w
f ace
and a relatively lower one to
w
clothes
.
5.4 Results
To verify that the usage of multiple modalities and
uniqueness constraints really aid person identifica-
tion, we start with a baseline method that utilizes only
the facial features for person representation. After-
wards, new features are added to the baseline one by
one until we reached the proposed framework that uti-
lizes all three modalities and uniqueness constraints.
5.4.1 Results on Single-event Dataset
For the single event dataset, results are evaluated on
each event separately. Moreover, we also calculate
the averages of all quality measures in order to have
a holistic picture of the performance as given in Ta-
ble 2. We can see how the final results depict the ef-
fectiveness of all intuitions discussed earlier. The in-
crease in SOR and CON with the introduction of new
modalities into the baseline is clearly evident. The
success of using clothing color can also be seen by
the increase in SOR and CON and also the decrease
in the FNR for important person detection. How-
ever, the use of clothing color slightly increases the
FPR. This is likely due to the merging of persons
with similar clothing color. Despite the usage of high-
level attributes with facial features, the overall results
do not show a significant increase in performance.
However, the capability of high-level attributes can
Table 2: Experimental results on the single-event dataset,
averaged over all events.
Method SOR CON FPR FNR
Only Face Features 0.67 0.56 0.42 0.32
Face+Clothes 0.70 0.60 0.48 0.29
Face+Attributes 0.67 0.58 0.41 0.32
Face+Clothes+Attributes 0.71 0.60 0.39 0.28
Face+Clothes+Attributes+
Uniqueness constraint
0.74 0.65 0.29 0.18
WhoistheHero?-Semi-supervisedPersonRe-identificationinVideos
171
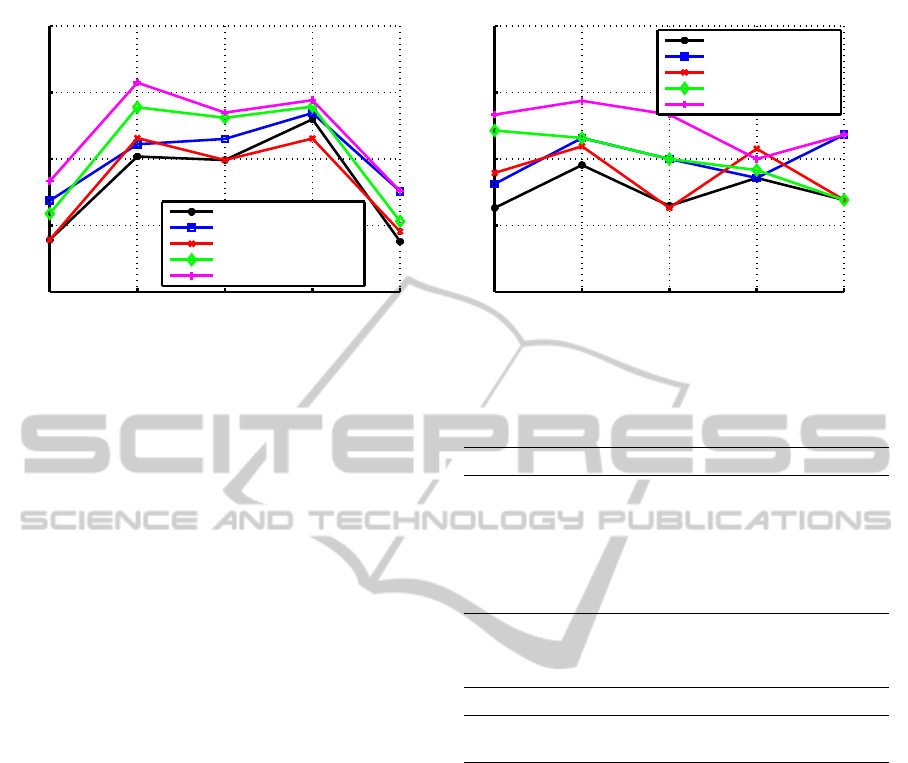
1 2 3 4 5
0.5
0.6
0.7
0.8
0.90.9
Event−ID
Self−Organization Rate (SOR)
Face Only (Baseline)
Face + Clothes
Face + Attributes
Face + Clothes + Attributes
All + Uniqueness Constraint
1 2 3 4 5
0.4
0.5
0.6
0.7
0.8
Event−ID
Cluster Conciseness (CON)
Face Only (Baseline)
Face + Clothes
Face + Attributes
Face + Clothes + Attributes
All + Uniqueness Constraint
Figure 7: Experimental results obtained using different methods over all events of the single-event dataset. (Left) Comparison
of the SOR using different methods. (Right) Comparison of the CON using different methods.
be seen on the results of individual events as seen in
Figure 7 where comparisons between SOR and CON
obtained using all methods on individual events are
given. The usage of high-level attributes increases
the performance of clustering for most of the events.
Similarly, the combination of all three modalities also
enhances the performance as compared to the other
methods. The usage of the uniqueness constraint also
shows promising results and appears to be very effec-
tive in almost all events. Finally the proposed algo-
rithm that utilizes all three modalities and the unique-
ness constraints increases the SOR from 0.67 (base-
line) to 0.74. Also the FPR and FNR are decreased to
0.29 and 0.18 as compared to 0.42 and 0.32, achieved
using the baseline method. All these results clearly
demonstrate the potency of using multiple modalities
and uniqueness constraints in unconstrained environ-
ments where there is no restriction on human pose,
lightening conditions, movements, etc.
5.4.2 Results on Multi-event Dataset
Table 3 summarizes the results obtained over the
multi-event dataset. We can see that usage of mul-
tiple modalities again works well and improves the
performance. A clear increment of all quality mea-
sures can be seen from the baseline to the proposed
algorithm. We are able to detect all important per-
sons of the multi-event dataset with SOR, CON and
FPR equal to 0.95, 0.70 and 0.04 respectively. These
results demonstrate the capacity of the proposed al-
gorithm in videos captured in different illumination,
weather conditions, occlusions and severe appearance
variations. In this case, no clothing color information
is used for inter-videos clustering.
Table 4 gives a comparison between the results ob-
tained by our framework and the one stated by (Barr
et al., 2011). We can see that our approach achieved
Table 3: Experimental results obtained over the multi-event
dataset.
Method SOR CON FPR FNR
Only Face Features 0.89 0.69 0.05 0.40
Face+Clothes 0.92 0.73 0.06 0.60
Face+Attributes 0.91 0.71 0.05 0.40
Face+Clothes+Attributes 0.94 0.73 0.04 0.20
Face+Clothes+Attributes+
Uniqueness constraint
0.95 0.70 0.04 0.00
Table 4: Comparison of the proposed algorithm with state-
of-the-art for the multi-event dataset.
Method SOR CON FPR FNR
Proposed 0.95 0.70 0.04 0.00
(Barr et al., 2011) 0.96 0.66 0.06 0.00
almost equal SOR and higher value of CON. More-
over, FPR is also lower than achieved by their method.
This shows that our method gives reduced amount of
redundant clusters and also provides low number of
false positives. However, it is important to note that
this comparison is not completely well-founded due
to the differences in face-tracks caused by different
face detection and tracking algorithms.
Despite the results obtained for multi-event
dataset are relatively better than the one obtained on
single-event dataset, it should be remembered that the
facial pose in this case is restricted to near frontal.
This shows the increase in complexity due to the vari-
ations in face pose and camera view angles.
6 CONCLUSIONS
In this paper the problem of semi-supervised person
re-identification, with application to important per-
son detection was addressed. A standalone frame-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
172

work was proposed that utilizes several visual modal-
ities and contextual constraints to group the occur-
rences of every individual across different videos. Ex-
perimental results on two challenging datasets illus-
trate the effectiveness of usage of multiple modalities.
The use of clothing colors and high-level attributes
demonstrates encouraging results and provides suffi-
cient increase in the performance. Similarly the com-
bination of all modalities (face, high-level attributes,
clothing color) showed promising results. Enhance-
ments have been achieved by enforcing the unique-
ness constraints into the clustering algorithm. The fi-
nal approach that utilizes all modalities and unique-
ness constraints exhibits a clear increase in perfor-
mance for both datasets. Experimental results vali-
date the performance of the proposed framework on
various challenging situations, emphasize on the im-
portance of face pose variations in real life scenarios
and encourage us to strive for better person represen-
tation techniques.
ACKNOWLEDGEMENTS
Authors are thankful to the band Eternal Erection and
other crowd members for allowing us to use their
videos in this research.
REFERENCES
Ahonen, T., Hadid, A., and Pietikainen, M. (2004). Face
Recognition with Local Binary Patterns. In European
Conference on Computer Vision.
Barr, J. R., Bowyer, K. W., and Flynn, P. J. (2011). Detect-
ing questionable observers using face track clustering.
In IEEE Workshop on Applications of Computer Vi-
sion.
Bauml, M., Bernardin, K., Fischer, M., Ekenel, H., and
Stiefelhagen, R. (2010). Multi-pose face recognition
for person retrieval in camera networks. In IEEE In-
ternational Conference on Advanced Video and Signal
Based Surveillance, pages 441–447.
B
¨
auml, M., Tapaswi, M., and Stiefelhagen, R. (2013).
Semi-supervised Learning with Constraints for Person
Identification in Multimedia Data. In IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM: A library
for support vector machines. ACM Transactions on
Intelligent Systems and Technology, 2.
Cinbis, R. G., Verbeek, J., and Schmid, C. (2011). Un-
supervised Metric Learning for Face Identification in
TV Video. In International Conference on Computer
Vision, Barcelona, Spain.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 25(5):564–577.
Cricri, F., Curcio, I. D. D., Mate, S., Dabov, K., and Gab-
bouj, M. (2012). Sensor-based analysis of user gener-
ated video for multi-camera video remixing. In IEEE
18th International Conference on Multimedia Model-
ing, pages 255–265.
Gou, G., Huang, D., and Wang, Y. (2012). A novel video
face clustering algorithm based on divide and conquer
strategy. In Proceedings of the 12th Pacific Rim in-
ternational conference on Trends in Artificial Intelli-
gence, pages 53–63.
Hao, P. and Kamata, S. (2012). Unsupervised people or-
ganization and its application on individual retrieval
from videos. In 21st International Conference on Pat-
tern Recognition, pages 2001–2004.
Klein, D., Kamvar, S. D., and Manning, C. D. (2002). From
instance-level constraints to space-level constraints:
Making the most of prior knowledge in data cluster-
ing. In International Conference on Machine Learn-
ing, pages 307–314, San Francisco, CA, USA.
Kumar, N., Belhumeur, P. N., and Nayar, S. K. (2008).
FaceTracer: A Search Engine for Large Collections
of Images with Faces. In European Conference on
Computer Vision, pages 340–353.
Kumar, N., Berg, A., Belhumeur, P., and Nayar, S. (2011).
Describable visual attributes for face verification and
image search. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 33(10):1962–1977.
Lo Presti, L. and La Cascia, M. (2012). An on-line learning
method for face association in personal photo collec-
tion. Image and Vision Computing, 30(4-5):306–316.
Sivic, J., Zitnick, C. L., and Szeliski, R. (2006). Finding
people in repeated shots of the same scene. In British
Machine Vision Conference.
Suh, B. and Bederson, B. B. (2004). Semi-automatic image
annotation using event and torso identification. Tech-
nical report, Computer Science Department, Univer-
sity of Maryland, College Park, MD.
Tao, J. and Tan, Y.-P. (2008). Efficient clustering of face
sequences with application to character-based movie
browsing. In IEEE International Conference on Image
Processing, pages 1708–1711.
U
ˇ
ri
ˇ
c
´
a
ˇ
r, M., Franc, V., and Hlav
´
a
ˇ
c, V. (2012). Detector of fa-
cial landmarks learned by the structured output SVM.
In Proceedings of the 7th International Conference on
Computer Vision Theory and Applications.
Zhang, L., Chen, L., Li, M., and Zhang, H. (2003). Auto-
mated annotation of human faces in family albums. In
Proceedings of the eleventh ACM international con-
ference on Multimedia, pages 355–358.
WhoistheHero?-Semi-supervisedPersonRe-identificationinVideos
173
