
Cross-spectral Stereo Correspondence using Dense Flow Fields
Naveen Onkarappa
1
, Cristhian A. Aguilera-Carrasco
1
, Boris X. Vintimilla
2
and Angel D. Sappa
1,2
1
Computer Vision Center, Universitat Aut`onoma de Barcelona, 08193 Bellaterra, Barcelona, Spain
2
CIDIS-FIEC, Escuela Superior Polit´ecnica del Litoral (ESPOL), Campus Gustavo Galindo, Km 30.5 v´ıa Perimetral,
P.O. Box 09-01-5863, Guayaquil, Ecuador
Keywords:
Cross-spectral Stereo Correspondence, Dense Optical Flow, Infrared and Visible Spectrum.
Abstract:
This manuscript addresses the cross-spectral stereo correspondence problem. It proposes the usage of a dense
flow field based representation instead of the original cross-spectral images, which have a low correlation. In
this way, working in the flow field space, classical cost functions can be used as similarity measures. Prelim-
inary experimental results on urban environments have been obtained showing the validity of the proposed
approach.
1 INTRODUCTION
The coexistence of cameras working at different spec-
tral bands is increasing (e.g., (Torabi et al., 2011),
(Barrera et al., 2012)). For instance, in video surveil-
lance applications long wavelength infrared sensors
(LWIR), also referred in the literature to as thermal
sensors, complement visual systems at night (Snidaro
et al., 2004). The same happens in the driving as-
sistance domain, where thermal information helps
detecting pedestrians (Krotosky and Trivedi, 2007).
Working on such a cross-spectral domain, we propose
to explore the possibility of finding correspondences
between the images through a cost function based on
the use of dense flow fields.
The multimodal correspondenceproblem between
LWIR and visible spectrum (VS) images has been re-
cently studied in several works for different applica-
tions such as image registration or stereovision. The
main challenge lies on the low correlation between
LWIR and VS. A way to overcome this lack of corre-
lation is by means of the use of prior knowledgeof the
objects in the scene; so the correspondence search is
limited to those regions of interest (ROI) such as hu-
man silhouettes (Krotosky and Trivedi, 2008), faces
(Socolinsky and Wolff, 2009), or contrasted objects
(Yang and Chen, 2011) (e.g., hot or cold objects on a
smooth background). Although these ROI based ap-
proacheshave shown attractive results, the main prob-
lem remains unsolved.
A more general solution has been presented in
(Barrera et al., 2013). In that work the authors pro-
pose a matching cost function for a multispectral
stereo rig based on mutual and gradient information
in a scale space representation. This cost function is
later on used in a minimization scheme, which is able
to extract dense disparity maps assuming a piecewise
planar representation. Although interesting results
have been presented, the main drawback lies on the
use of an expensive minimization scheme and on the
assumption of a piecewise planar representation. In
order to avoid the low correlation problem, (Pistarelli
et al., 2013) propose to search for correspondences in
the Hough space; hence, edges from the given cross-
spectral images are extracted and represented in the
Hough space. These edges correspond to predomi-
nant geometries in the scene. Only matchings over
edges can be obtained with this approach.
Similarly to the previous approaches, in the cur-
rent work we propose not to search for correspon-
dences in the image space, where there is a low cor-
relation between LWIR and VS, but in a space where
both images have the same representation. The pro-
posed work is intended to be used in dynamic sce-
narios where there is a relative motion between the
cross-spectral stereo rig and the objects contained in
the scene. In our particular case the cameras are used
for driving assistance and they are placed on the top
of our vehicle (see Fig. 1). The proposed approach is
based on the fact that since both cameras are rigidly
attached to the same rig, and images accordingly cal-
ibrated and rectified, the optical flow information can
be used for the correspondencesearch. Cross-spectral
video sequences of urban scenarios are used for the
613
Onkarappa N., Aguilera-Carrasco C., Vintimilla B. and Sappa A..
Cross-spectral Stereo Correspondence using Dense Flow Fields.
DOI: 10.5220/0004736006130617
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 613-617
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

evaluation.
The manuscript is organized as follow. Section 2
gives details about the cross-spectral stereo rig. The
proposed approach is introduced in Section 3. Ex-
perimental results on urban scenarios are discussed in
Section 4. It should be noticed that currentmanuscript
is intended to show how cross-spectral correspon-
dence problem can be tackled by representing the
given images in another domain. More deep and rig-
orous validations would be required to show the ad-
vantage of the proposed approach. Finally, conclu-
sions and future work are given in Section 5.
2 SYSTEM SETUP
The stereo head used in the current work consists of
a pair of cameras separated by a baseline of about 12
cm and a non verged geometry. The images provided
by the cross-spectral stereo head are calibrated and
rectified using (Bouguet, 2010); a process similar to
the one presented in (Barrera et al., 2012) is followed.
It consists of using a thin aluminiummetallized paper,
with black and white squares that is observed by both
cameras. The LWIR camera (Gobi-640-GigE from
Xenics) providesimages up to 50 fps with a resolution
of 640×480 pixels. The visible spectrum camera is an
ACE from Basler with a resolution of 658×492 pix-
els. Both cameras are synchronized using an external
trigger. Camera focal lengths were set so that pixels
in both images contain similar amount of information
from the given scene. Figure 1 shows an image of
the stereo rig together with a commercial stereo cam-
era (Bumblebee XB3 from Point Grey), which will be
used in a future work for validating the cross-spectral
stereo correspondence. The whole platform is placed
on the roof of a vehicle for driving assistance applica-
tions.
3 PROPOSED APPROACH
This section details the two steps of the proposed ap-
proach. First, an overview of the variational formula-
tion used for the optical flow estimation is provided.
Then, cost functions that could be used for finding
correspondences are detailed.
3.1 Dense Optical Flow
Several variational approaches have been proposed
for optical flow estimation in recent years
1
. Varia-
1
http://vision.middlebury.edu/flow/
tional formulations involve a data term and a regular-
ization term. The data term formulates the assump-
tion matching characteristics, typically the intensity
of the pixel; it is also called brightness constancy as-
sumption (BCA) (Horn and Schunk, 1981). The BCA
can be formulated as: I
1
(x+ u)− I
0
(x) = 0, where
I
0
and I
1
are two consecutive images, x = (x, y) is
the pixel location within the image space Ω ⊆ R
2
;
u = (u(x), v(x)) is the two-dimensional flow vector.
Linearizing the above equation using first-order Tay-
lor expansion we get BCA as: (I
x
u + I
y
v + I
t
)
2
= 0,
where subscripts denote the partial derivatives. Us-
ing only BCA does not provide enough information
to infer meaningful flow fields, making the problem
ill-posed. In order to solve this ill-posed problem a
regularization term is needed. In (Horn and Schunk,
1981) a regularization term, based on the assumption
that resulting flow field is globally smooth all over the
image, is proposed. Combining BCA and homoge-
neous regularization in a single variational framework
and squaring both constraints yields the following en-
ergy function:
E(u) =
Z
Ω
{ (I
x
u+ I
y
v+ I
t
)
2
|
{z }
Data Term
(1)
+ α (|∇u|
2
+ |∇v|
2
|
{z }
Regularization
)} dx,
where α is the regularization weight. This energy
function is minimized for flow vectors using corre-
sponding Euler-Lagrange equations.
Since the current work is intended for driving sce-
narios, we decided to use the Laplacian of flow com-
ponents, instead of their gradients, as penalization
in the regularization term. This strategy has been
recently presented in (Onkarappa and Sappa, 2013)
showing interesting results. Hence, the energy func-
tion becomes:
E(u) =
Z
Ω
{ (I
x
u+ I
x
v+ I
t
)
2
|
{z }
Data Term
(2)
+ α (|△u|
2
+ |△v|
2
|
{z }
Regularization
)} dx.
The resulting flow field is depicted using the clas-
sical optical flow color map, where color indicates the
direction and intensity indicates the magnitude (Fig.
2(right) shows optical flow depicted using color map
coding). Hereinafter, I
VS
will refer to the color coded
flow field of visible spectrum sequence, while I
LWIR
corresponds to the color coded flow field of the LWIR
spectrum sequence.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
614
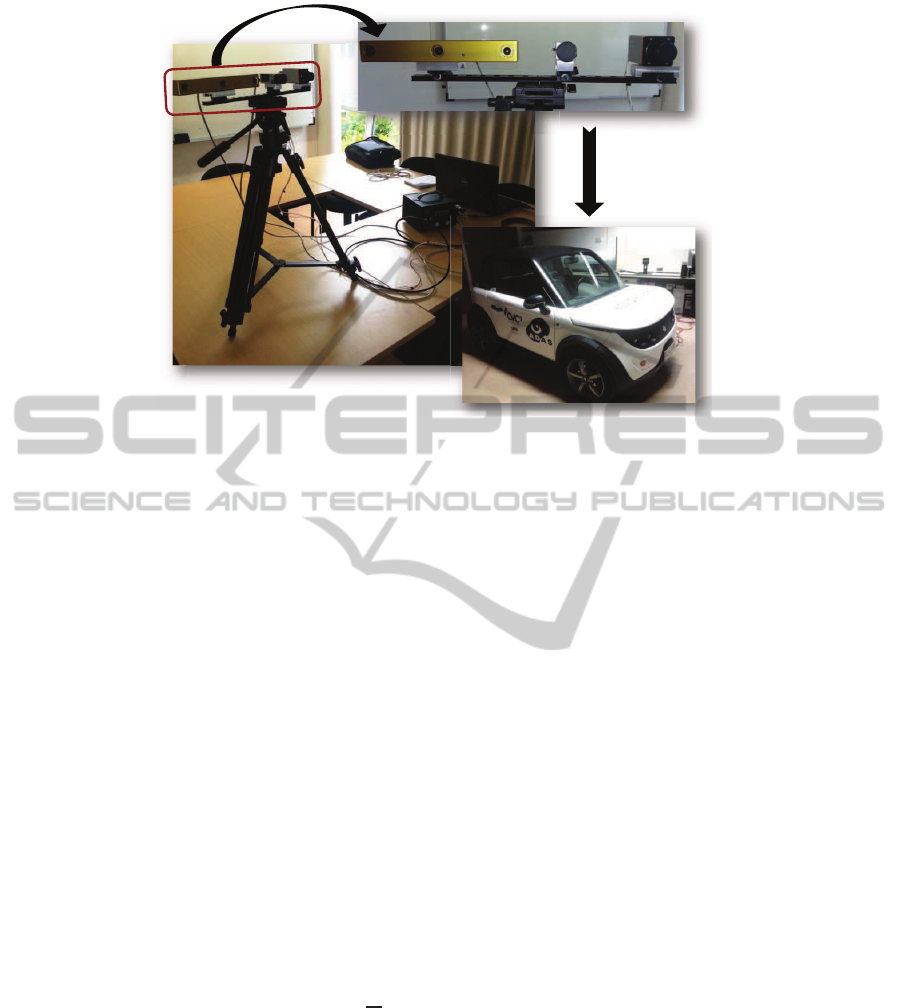
Figure 1: Cross-spectral stereo rig together with a commercial system to be used as a ground truth.
3.2 Correspondence Search
Once every pixel in both images (VS and LWIR) is
associated with a vector representing the relative mo-
tion between the camera and the point in the 3D space,
correspondences are computed. This section just
presents three similarity measures that could be used
as correspondence functions in the flow field domain:
sum of absolute differences (SAD), sum of squared
differences (SSD), and normalized cross-correlation
(NCC) (Faugeras et al., 1993). During last decades
there have been several improvements looking for in-
variance to photometric distortions or for producing a
disparity map with sub-pixel accuracy (e.g., (Shimizu
and Okutomi, 2001), (Scharstein and Szeliski, 2002),
(Psarakis and Evangelidis, 2005)).
In the current work, since the cross-spectral
matching is not implemented at the photometric level,
but at a color level corresponding to the flow field rep-
resentations, we propose to evaluate SAD, SSD and
NCC—their corresponding expressions are presented
in Equations (3), (4) and (5), where d represents the
disparity value, N the correlation window and
N the
mean value of the elements in that correlation win-
dow. In all the cases the images I
VS
and I
LWIR
rep-
resenting the flow fields are considered. At the mo-
ment just a winner-take-all strategy is considered for
assigning the best matches, in the future other strate-
gies will be implemented to improve results.
4 EXPERIMENTAL RESULTS
The proposed approach has been tested using cross-
spectral image pairs from the on-board stereo rig
presented in Section 2. The main intention of cur-
rent work is to evaluate the validity of the proposed
scheme, instead of the accuracy of obtained results
that will need larger data sets with different scenar-
ios. Figure 2 shows a pair of VS images and a pair of
LWIR images (left column) together with their corre-
sponding dense flow field (right column). From these
flow fields the three cost functions presented in Equa-
tions (3), (4) and (5) have been evaluated. The cor-
responding sparse disparity maps obtained using the
different cost functions are similar.
In all the cases sparse representations were ob-
tained since only those correspondence values with a
cost smaller than a given thresholdwere considered as
valid. We can conclude that moving from the cross-
spectral domain to another representation, common
to both inputs, can be useful for finding correspon-
dences. Similar conclusion was presented in the lit-
erature by mapping the given images to the Hough
space (e.g., (Pistarelli et al., 2013)). The main prob-
lem lies on the tradeoff between the dense optical flow
representation and the accuracy of those flow vectors.
The dense optical flow representation is obtained by
the regularization term, which somehow smooths the
results. This smoothing indirectly affect the accuracy
during the correspondence search.
From the obtained results it is not clear which is
the best correspondence function, all of them have a
Cross-spectralStereoCorrespondenceusingDenseFlowFields
615

C
SAD
(x,y,d)
=
∑
(i, j)∈N
x,y
|I
VS
(i, j) − I
LWIR
(i+ d, j)| (3)
C
SSD
(x,y,d)
=
∑
(i, j)∈N
x,y
(I
VS
(i, j) − I
LWIR
(i+ d, j))
2
(4)
C
NCC
(x,y,d)
=
∑
(i, j)∈N
x,y
(I
VS
(i, j) −
I
VS
(N
x,y
)) · (I
LWIR
(i+ d, j) − I
LWIR
(N
x,y
))
q
∑
(i, j)∈N
x,y
(I
VS
(i, j) −
I
VS
(N
x,y
))
2
· (I
LWIR
(i+ d, j) − I
LWIR
(N
x,y
))
2
(5)
I
0
I
1
I
0
I
1
Figure 2: (left) Two pairs of cross-spectral images (VS and LWIR). (right) Dense flow fields used for the correspondence
search.
similar result. Another problem to be considered for
future work is the lack of ground truth disparity value,
although we expect to use the Bumblebee camera (at
the left side in our stereo rig, see Fig. 1) temporal syn-
chronization problems need to be solved first (Bum-
blebee work up to 15fps).
5 CONCLUSIONS AND FUTURE
WORK
This manuscript presents an approach to tackle the
low correlation between cross-spectral stereo images
by representing the given inputs in a common space.
It is based on the use of dense optical flow in the
cost function formulation. As a preliminary study,
we present some conclusions using different similar-
ity measures. More deep validations should be per-
formed to find the best similarity measure together
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
616

with the best matching criteria (currently a winner-
takes-all is considered). Additionally, ground truth
values will be considered for such a validation. As
mentioned in Section 1, current manuscript is in-
tended to show preliminary results from our approach
and how the proposed scheme can represent an alter-
native to overcome the lack of correlation, or to im-
prove the results from cross-spectral correspondence
search.
ACKNOWLEDGEMENTS
This work has been partially supported by the Span-
ish Government under Research Project TIN2011-
25606 and PROMETEO Project of the ”Secretar´ıa
Nacional de Educaci´on Superior, Ciencia, Tecnolog´ıa
e Innovaci´on de la Rep´ublica del Ecuador”. Cristhian
A. Aguilera-Carrasco was supported by a grant from
”Universitat Aut`onoma de Barcelona”.
REFERENCES
Barrera, F., Lumbreras, F., and Sappa, A. D. (2012). Mul-
timodal stereo vision system: 3d data extraction and
algorithm evaluation. J. Sel. Topics Signal Process-
ing, 6(5):437–446.
Barrera, F., Lumbreras, F., and Sappa, A. D. (2013). Mul-
tispectral piecewise planar stereo using manhattan-
world assumption. Pattern Recognition Letters,
34(1):52–61.
Bouguet, J.-Y. (2010). Camera calibration toolbox for mat-
lab.
Faugeras, O., Hotz, B., Mathieu, H., Vieville, T., Zhang, Z.,
Fua, P., Theron, E., Moll, L., Berry, G., Vuillemin, J.,
Bertin, P., and Proy, C. (1993). Real time correlation-
based stereo: algorithm, implementations and appli-
cations. In INRIA Technical Report, No. 2013, August
1993, page 56.
Horn, B. K. P. and Schunk, B. G. (1981). Determining op-
tical flow. Artificial Intelligence, 17:185–203.
Krotosky, S. J. and Trivedi, M. M. (2007). On color-,
infrared-, and multimodal-stereo approaches to pedes-
trian detection. IEEE Trans. on Intelligent Transporta-
tion Systems, 8(4):619–629.
Krotosky, S. J. and Trivedi, M. M. (2008). Person surveil-
lance using visual and infrared imagery. IEEE Trans.
on Circuits and Systems for Video Technology, 18(8).
Onkarappa, N. and Sappa, A. D. (2013). Laplacian deriva-
tive based regularization for optical flow estimation in
driving scenario. In 15th International Conference on
Computer Analysis of Images and Patterns, York, UK,
August 27-29, 2013, pages 483–490.
Pistarelli, M. D., Sappa, A. D., and Toledo, R. (2013). Mul-
tispectral stereo image correspondence. In 15th Inter-
national Conference on Computer Analysis of Images
and Patterns, York, UK, August 27-29, 2013, pages
217–224.
Psarakis, E. Z. and Evangelidis, G. D. (2005). An enhanced
correlation-based method for stereo correspondence
with sub-pixel accuracy. In 10th IEEE International
Conference on Computer Vision, 17-20 October 2005,
Beijing, China, pages 907–912.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International Journal of Computer Vision,
47(1-3):7–42.
Shimizu, M. and Okutomi, M. (2001). Precise sub-pixel
estimation on area-based matching. In International
Conference on Computer Vision, pages 90–97.
Snidaro, L., Foresti, G. L., Niu, R., and Varshney, P. K.
(2004). Sensor fusion for video surveillance. In Elec-
trical Engineering and Computer Science.
Socolinsky, D. A. and Wolff, L. B. (2009). Face recogni-
tion in low-light environments using fusion of ther-
mal infrared and intensified imagery. In Hammoud,
R. I., editor, Augmented Vision Perception in Infrared,
Advances in Pattern Recognition, pages 197–211.
Springer London.
Torabi, A., Najafianrazavi, M., and Bilodeau, G. (2011).
A comparative evaluation of multimodal dense stereo
correspondence measures. In IEEE Int’l Symp. on
Robotic and Sensors Environments, volume 1, pages
143–148.
Yang, R. and Chen, Y. (2011). Design of a 3-D infrared
imaging system using structured light. IEEE Trans. on
Instrumentation and Measurement, 60(2):608 –617.
Cross-spectralStereoCorrespondenceusingDenseFlowFields
617
