
Improved ICP-based Pose Estimation by Distance-aware 3D Mapping
Hani Javan Hemmat, Egor Bondarev, Gijs Dubbelman and Peter H. N. de With
Eindhoven University of Technology, Eindhoven, The Netherlands
Keywords:
3D Reconstruction, Voxel-models, Camera-pose Estimation Weighting Strategy, Truncated Signed Distance
Function (TSDF), Simultaneous Localization and Mapping (SLAM), Low-cost Depth Sensor.
Abstract:
In this paper, we propose and evaluate various distance-aware weighting strategies to increase the accuracy
of pose estimation by improving the accuracy of a voxel-based model, generated from the data obtained by
low-cost depth sensors. We investigate two strategies: (a) weight definition to prioritize prominence of the
sensed data according to the data accuracy, and (b) model updating to determine the influential level of the
newly captured data on the existing synthetic 3D model. Specifically, we propose Distance-Aware (DA) and
Distance-Aware Slow-Saturation (DASS) updating methods to intelligently integrate the depth data into the
3D model, according to the distance-sensitivity metric of a low-cost depth sensor. We validate the proposed
methods by applying them to a benchmark of datasets and comparing the resulting pose trajectories to the
corresponding ground-truth. The obtained improvements are measured in terms of Absolute Trajectory Error
(ATE) and Relative Pose Error (RPE) and compared against the performance of the original Kinfu. The
validation shows that on the average, our most promising method called DASS, leads to a pose estimation
improvement in terms of ATE and RPE by 43.40% and 48.29%, respectively. The method shows robust
performance for all datasets, with best-case improvement reaching 90% of pose-error reduction.
1 INTRODUCTION
The 3D sensing and mapping of arbitrarily-shaped
environments is a highly active research topic, as it
comes as a pre-requisite for various currently promi-
nent research domains, such as 3D shape acquisition
and modelling, surface generation and texturing, as
well as localization and robot vision. During recent
years, the advent of low-cost, hand-held, and accu-
rate 3D sensors along with the introduction of power-
ful general-purpose GPUs, lead to first solutions run-
ning a real-time 3D reconstruction process for rela-
tively large and complex indoor and outdoor environ-
ments. In a 3D reconstruction process, the 3D vol-
umetric model-generation methods play an outstand-
ing role influencing the accuracy of obtained results,
in a mutual cooperation with the camera-pose esti-
mation methods. For localization based on 3D fea-
tures, generation of an accurate 3D synthetic model
containing higher details leads to a more accurate
pose estimation and the associated process results in
a higher quality 3D model. This correlation between
3D synthetic model and camera-pose estimation is a
“chicken and egg” problem in the Simultaneous Lo-
calization and Mapping (SLAM) domain.
Various volumetric structures, for modelling 3D
spaces have been introduced to represent scene ge-
ometry, including the Point Cloud structure (Rusu and
Cousins, 2011), the Signed Distance Function (SDF)
(Curless and Levoy, 1996), voxel-based (Newcombe
et al., 2011a; Newcombe et al., 2011b), surfel-based
(Chang et al., 2011; Andersen et al., 2010), and the
Octree-based models (Zeng et al., 2012). The SDF
model has been used to integrate the depth images
into a synthetic 3D model (Kubacki et al., 2012; Ren
and Reid, 2012). The RGB-D mapping, combined
with visual SLAM, pose-correction, and optimization
approaches, are largely investigated in recent years
(Henry et al., 2012; Henry et al., 2010; Engelhard
et al., 2011; Endres et al., 2012; K
¨
ummerle et al.,
2011; Hornung et al., 2013). To register new depth
data with a 3D synthetic model, the Iterative Clos-
est Point (ICP) algorithm (Besl and McKay, 1992), or
similar iterative approaches (Bylow et al., 2013), have
been exploited by the applications taking advantage
of low-cost depth sensing devices. These applications
include KinectFusion (Newcombe et al., 2011a; Izadi
et al., 2011), Kintinious (Whelan et al., 2012; Whe-
lan et al., 2013), open source KinFu (PCL, 2011),
and KinFu Large Scale (Bondarev et al., 2013). All
of them use a Truncated version of the SDF model
(TSDF), in order to reconstruct 3D geometry of the
360
Javan Hemmat H., Bondarev E., Dubbelman G. and de With P..
Improved ICP-based Pose Estimation by Distance-aware 3D Mapping.
DOI: 10.5220/0004716403600367
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 360-367
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

environment and utilize the Kinect as the depth sen-
sor. The TSDF model provides averaging of the com-
plete set of the sensor data over time. While recent
investigation of the Kinect technology has unveiled
that it is robust to incidence angle, ambient light,
and radiometric influences, the sensor is less accu-
rate for large distance measurements (Chow et al.,
2012; Khoshelham and Elberink, 2012; Khoshelham,
2011).
In the conventional TSDF model, a 3D array of
voxels is used to form a synthetic 3D model, repre-
senting the sensed environment. The newly extracted
points of each depth frame are integrated into the 3D
synthetic TSDF model. The TSDF model takes ad-
vantage of a weighting strategy to discriminate newly
upcoming sensed data, by assigning a higher weight
to less noisy data. In the KinectFusion and KinFu, a
weight value of unity is used for each valid point. We
expect a conspicuous enhancement in terms of model
quality by proposing a weighting strategy based on
the intrinsic distance-sensitivity of the Kinect sensor.
Due to the unity weight in the conventional TSDF
model, the newly sensed data is integrated into the
3D model without considering its accuracy. As a sub-
sequent result, the objects in the synthetic 3D model
can be deformed by the new depth data containing in-
formation of the same objects, captured from a fur-
ther distance. According to the distance sensitivity
of the depth sensors, an explanation for this deforma-
tion is that the updating mechanism may overwrite the
synthesized reasonably accurate data with less accu-
rate data over time. The consequence of this model
degradation has a clear impact on the quality of the
camera-pose estimation algorithm. For every newly
captured depth frame, the camera pose is calculated,
based on the current state of the synthetic 3D model.
Therefore, an inaccurate 3D model containing less de-
tails leads to a more erroneous pose estimation for
each new frame. The contribution of this work is to
propose a weighting strategy for the TSDF model to
prevent the model deformation and, by doing so, im-
prove the pose estimation quality accordingly. This
process involves the following steps. First, a weight
definition is introduced to evaluate the quality of each
point of the new depth frame. Second, we present an
updating method with an intelligent decision making
to integrate the new depth data into the synthetic 3D
model. The proposed weighting strategy has been im-
plemented in the KinFu framework. We have evalu-
ated the introduced methods on a group of datasets
with ground-truth trajectory information. The ob-
tained results have been compared to the ground truth
in terms of Absolute Trajectory Error (ATE) and Rela-
tive Pose Error (RPE) in both translation and rotation.
The paper is structured as follows. Section 2 in-
troduces the weighting definitions and strategies. The
experiments are presented in Section 3. Section 4
elaborates on the analysis and discussion. Section 5
concludes the paper.
2 WEIGHTING STRATEGIES
2.1 Conventional TSDF Model
In the conventional applications exploiting TSDF to
model the 3D geometry (Newcombe et al., 2011a;
PCL, 2011), each voxel is represented as a pair of dis-
tance value (D
i
) and accumulated weight (W
i
), indi-
cating the truncated distance value to the closest sur-
face and the weight for this value, respectively. This
structure averages the captured depth data, influenc-
ing the voxel model after i frames. The voxel x of the
model is updated by the corresponding pair of trun-
cated distance value (d
i+1
) and weight (w
i+1
) of the
(i+1)th depth frame, according to the following two
equations:
D
i+1
(x) =
W
i
(x)D
i
(x) + w
i+1
(x)d
i+1
(x)
W
i
(x) + w
i+1
(x)
, (1)
W
i+1
(x) = W
i
(x) + w
i+1
(x) . (2)
Parameter d
i
is the truncated distance value calculated
for voxel x, based on the corresponding newly sensed
valid depth point. Variable w
i
is the weight for d
i
.
Equation (1) defines the integration of d
i
into the cor-
responding voxel x. The weight for voxel x is accumu-
lated in W
i
based on Equation (2). Assigning w
i+1
= 1
for each valid point found in the (i+1)th frame, leads
to simple averaging over time. The constant unity
value for the weight influences the 3D model updating
process in the following way. The Kinect senses ob-
jects in close proximity more accurately (Chow et al.,
2012; Khoshelham and Elberink, 2012; Khoshelham,
2011). Due to this distance sensitivity, the model
is degraded by overwriting the more accurate data
(closer range) by less accurate data (farther). There-
fore, the objects located close to the sensor (≤ 1 m)
are modelled appropriately, while the objects located
at a farther distance (≥ 2 m) are deformed or even
destroyed.
2.2 Weight Definitions and Updating
Here, we introduce more competent definitions of
the weight factor to distinguish between the sensed
data of close and far distances. We have evaluated
various weight definitions (publicly available at
ImprovedICP-basedPoseEstimationbyDistance-aware3DMapping
361

http://vca.ele.tue.nl/demos/MMM14/mmm14.html).
The common feature for all definitions is that a
higher weight is assigned to close distances. Due
to the Kinect characteristics, we have considered
a valid range for depth data, defined between a
maximum and a minimum distance, d
max
and d
min
,
respectively. Besides this, the weight is bounded
between 0 and a maximum weight W
max
. The
following equation defines a weight that, according
to our experiments, provides the best performance
among various alternatives, which is
weight
depth point
(x) = [
1
d(x)
2
−
1
d
2
max
1
d
2
min
−
1
d
2
max
] ∗W
max
. (3)
For each valid depth value x with distance of d(x) in
the range between d
min
and d
max
, the corresponding
weight is calculated as a value between 0 and W
max
.
In conventional implementations of the TSDF
model, the updating process is straightforwardly per-
formed with constant unity weight. The weight def-
inition from Equation (3) enables us to discriminate
between closer and farther distances. Therefore, such
weight definition enables intelligent updating of the
TSDF model via prevention of more accurate values
being overwritten by less accurate data. In the re-
mainder of this section, we introduce two updating
algorithms to guarantee that the synthetic 3D model
is updated with the most accurate data available dur-
ing the updating process.
Distance-Aware (DA) Updating Method
In this method, we exploit the following rule to up-
date each voxel value in the synthetic 3D model: “if
a voxel has already been updated by a truncated dis-
tance value with a higher weight, never update it with
a truncated distance value of lower weight”. The DA
updating method is formulated as:
Flag(v, x) = weight
new
(x) ≥ r% × weight
LMU
(v),
(4)
Update(v, x) =
Integrate x into v if (Flag(v, x)),
Discard x, keep v otherwise.
(5)
The last maximum updated weight weight
LMU
(v)
contains the value for the maximum weight that
voxel v has ever been updated with. To enhance the
robustness to noise, we have proposed a tolerance
range r, with 0 ≤ r ≤ 100. This leads to the integra-
tion of the distance values close to the weight
LMU
(v)
affected by noise.
The Update(v, x) function conditionally updates
the 3D model according to Equation (1). Throughout
the updating process, the accumulated weight value
for each voxel W
i
(x) is collected, based on Equa-
tion (2). The weight of each new voxel value w
i
is equal to the weight of the corresponding distance
value (Equation (3)). Therefore, 0 ≤ w
i
≤ W
max
. In
comparison with the conventional TSDF implementa-
tion with w
i
= 1, the introduced method grows faster
with the accumulated weight value for each voxel.
The accumulation of the weight values rapidly ex-
ceeds the 1-Byte specification used for the conven-
tional algorithm with w
i+1
= 1. Using a 2-Byte word
for W
i
can circumvent this, but it leads to a larger
memory requirement, so that we introduce the DASS
method below.
Distance-Aware Slow-Saturation (DASS)
Updating Method
The DASS method is an alternative to maintain the
framework of the conventional TSDF implementa-
tion and avoid the rapid saturation of the accumulated
weight in the DA method. The DASS method is sim-
ilar to the DA method, except for the way it accu-
mulates the weight for each voxel. To this end, the
DASS method utilizes the weight definition of Equa-
tion (3) for the Update(v, x) function to condition-
ally update the 3D model, similar to the DA method.
However, in contrast with the DA method, in DASS
the new weight w
i+1
is set to unity to calculate the ac-
cumulated weight value W
i+1
. Assigning w
i+1
= 1 in
the DASS method suppresses the quick saturation of
the accumulated weight value, while the Update(v, x)
function guarantees the intelligent updating.
It should be mentioned that both proposed meth-
ods have the benefit of the distance-based updating
feature compared to the conventional algorithms. The
DA and DASS algorithms still enable efficient mem-
ory management, while employing this advantageous
feature.
3 EXPERIMENTS
3.1 Implementation
We have used the original framework of the open
source KinFu implementation from the Point Clouds
Library (PCL, 2011) to implement the proposed
methods. We have exploited the original structure and
introduced the new weight definitions and updating
algorithms as discussed above. We have utilized a
previously allocated but unused byte in the original
structure to store the weight
LMU
part of the W
i
.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
362
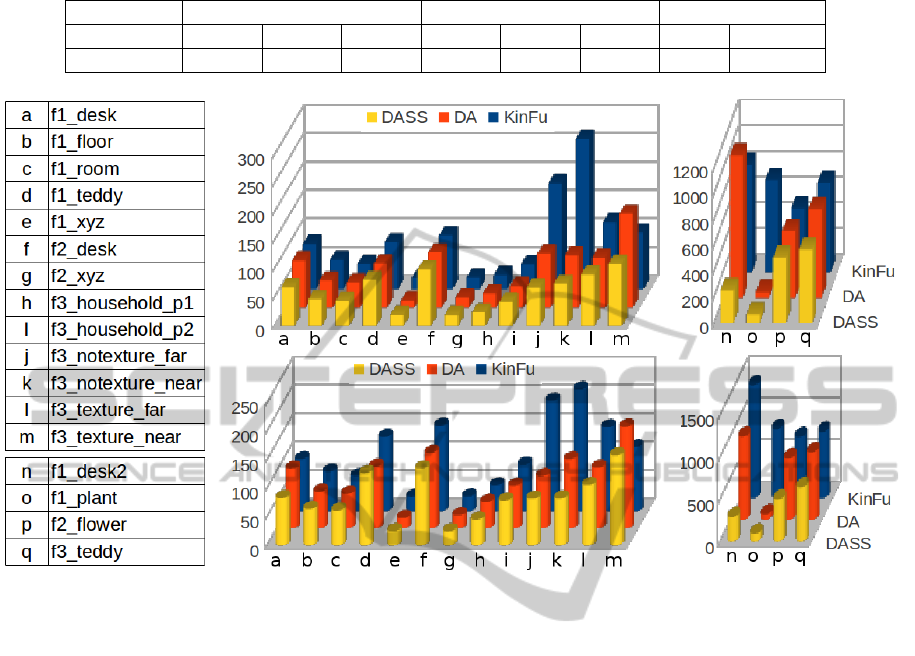
Table 1: Average performance of the proposed methods applied to the benchmark 17 datasets.
Benchmark ATE (mm) RPE (mm) Improvement (%)
Frames KinFu DA DASS KinFu DA DASS DA DASS
1162.71 229.16 191.64 129.71 295.42 218.44 152.78 21.22 45.84
Figure 1: Detailed ATE and RPE values for the DA, DASS, and original KinFu methods applied to 17 datasets of the TUM
benchmark (mm). First row depicts the ATE metric and the RPE is illustrated in second row.
3.2 Dataset
We have evaluated the proposed algorithms on the
TUM RGB-D benchmark (Sturm et al., 2012). For
each dataset of the benchmark, we have compared
the resulting pose trajectories of the DA, DASS, and
original KinFu methods against the corresponding
ground-truth trajectory. For the r parameter in Equa-
tion (4), we have explored a range of various settings
and selected a value that leads to the highest quality
(r = 80).
3.3 Evaluation Approach
We have used two prominent methods to compare
the estimated trajectory obtained by the DA, DASS,
and KinFu methods to the ground truth: the Abso-
lute Trajectory Error (ATE) and the Relative Pose Er-
ror (RPE). The ATE measures the difference between
points of the true and the estimated trajectories. The
RPE is the error in the relative motion between two
pairs of consecutive poses.
4 ANALYSIS AND DISCUSSION
4.1 Quantitative Evaluation
As depicted in Figure 1, for most of the datasets, the
DASS and/or DA methods outperform the original
weighting strategy of the KinFu for both the ATE and
RPE. Due to Table 1, in comparison with the origi-
nal KinFu, the DA method reduces on the average the
ATE and RPE by 16.37% and 26.06%, respectively.
Even better than this, the DASS method improves the
pose estimation by reducing the ATE and RPE on the
average by 43.40% and 48.29%, respectively.
An interesting finding is that the DA and DASS
methods improve the KinFu pose-estimation perfor-
mance more in terms of RPE rather than ATE. One
reason for this is due to the different nature of the ATE
and RPE. The ATE is an appropriate metric to mea-
sure the performance of visual SLAM systems, while
the RPE is well-suited for measuring the drift of a vi-
sual odometry system. Since there is no loop-closure
detection in the original KinFu, the ATE suffers from
this, whereas locally improved quality and accuracy
ImprovedICP-basedPoseEstimationbyDistance-aware3DMapping
363
of the 3D model, leads to a better performance of the
ICP as a pose estimator. Hence, the drift error in the
poses reduced so that the RTE reduction is more sig-
nificant than the ATE.
Table 2 focuses on details of the ATE metric.
Comparing the DA method to the original KinFu, the
ATE is reduced by 17.85% and 25.07% in terms of
mean and median, respectively. Besides this, the stan-
dard deviation is improved by 10.62%. For the DASS
method, the improvement is even higher. In compar-
ison with the KinFu, the DASS method improves the
ATE by 47.82%, 54.80%, and 30.26% in terms of
mean, median, and standard deviation, respectively.
Table 2: Detailed ATE values for the DA, DASS, and orig-
inal KinFu methods applied to 17 datasets of the TUM
benchmark (mm).
Method rsme mean median std
KinFu 229.16 199.26 173.76 109.41
DA 191.64 163.69 130.20 97.79
DASS 129.71 103.98 78.53 76.31
One observation is that on the average, the DASS
method improves the pose estimation approximately
two times more than the DA method. This per-
formance difference is explained by the number of
frames that is used for the accumulation of the weight
metric. If the number of frames involved in the ac-
cumulation grows, then the intrinsic noise component
of the depth sensor is more averaged and its influence
decreases, thereby improving the quality.
We investigate the RPE improvement with respect
to translation and rotation (see Tables 3 and 4). Due
to Table 3, the translation error for the DA method
is reduced by 22.30%, 45.14%, and 17.36% in terms
of rsme, median, and standard deviation, respectively.
The translation error reduction is higher for the DASS
method by 46.76%, 56.26%, and 44.46% for the same
parameters.
Table 3: Detailed RPE values expressed as translation error,
for the DA, DASS, and original KinFu methods applied to
17 datasets of the TUM benchmark (mm).
Method rsme mean median std
KinFu 386.32 295.42 254.22 245.64
DA 300.17 218.44 139.47 203.01
DASS 205.67 152.78 111.20 136.42
Regarding the improvement of the rotation error
shown in Table 4, the DA method reduces the error
by 22.72%, 24.07%, 7.43%, and 21.48% in terms of
rsme, mean, median, and standard deviation, respec-
tively. The DASS method improves the rotation er-
ror by 29.58%, 35.35%, 35.82%, and 22.22% for the
same parameters.
An interesting observation is that according to the
rsme, mean, and standard deviation metrics for the
RPE, there is a higher improvement in terms of trans-
lation rather than rotation by a factor of 1.72. For the
median, this is opposite by a factor of 3.87. Besides
this, there is a huge difference between the mean and
the median for rotation error: the mean value is 68
times larger than the median. We explain these dis-
crepancies by relatively large outliers which influence
other metrics than the median.
Table 4: Detailed RPE expressed as rotation error, for
the DA, DASS, and original KinFu methods applied to 17
datasets of the TUM benchmark (degree).
Method rsme mean median std
KinFu 17.36 13.67 0.19 10.64
DA 13.42 10.38 0.17 8.36
DASS 12.23 8.84 0.12 8.28
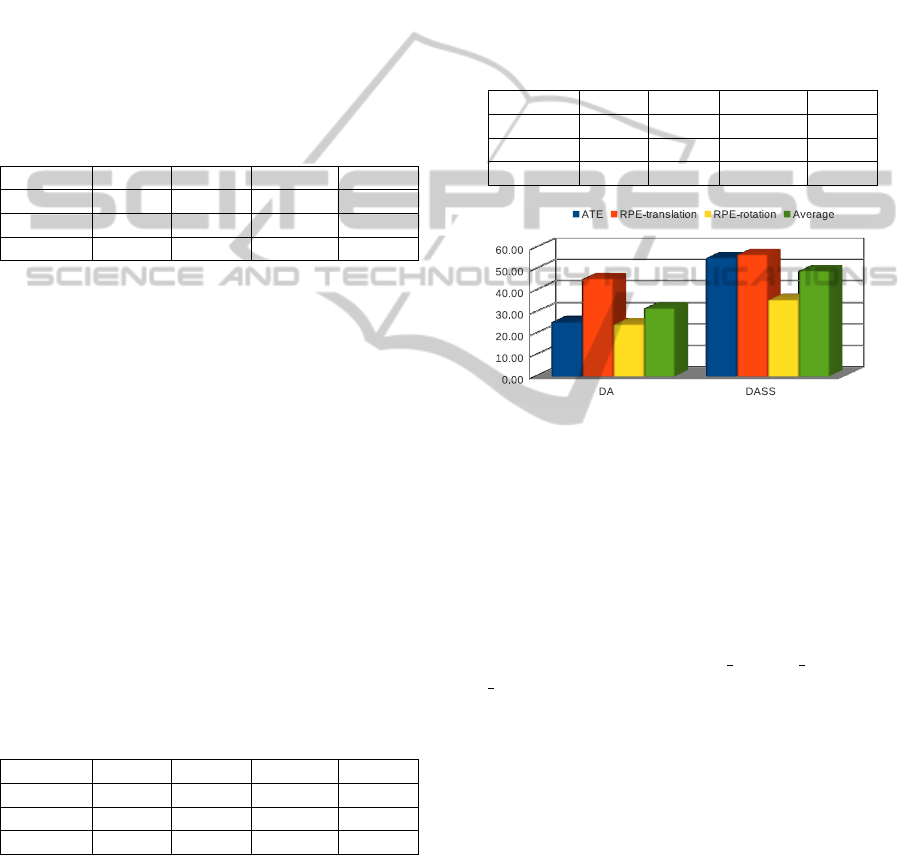
Figure 2: Percentage of error reduction for the DA and
DASS methods compared to the original KinFu based on
the median metric.
Another finding is that for both methods, the high-
est improvements result from using the median met-
ric. The reason for this is that the mean, compared
to the median, is not a robust computation technique,
since it is sensitive to extreme scores and largely in-
fluenced by outliers. In the exploited benchmark, as
illustrated in Figure 1, there are some extreme er-
ror values for the datasets of f1 desk, f2 flower, and
f3 teddy, which as outliers influence the mean met-
ric. Figure 2 depicts the improvements when using
the median metric. Using the average median, the DA
and DASS methods elevate the pose-estimation pro-
cess by 31.43% and 48.80%, respectively.
4.2 Correspondence between Pose
Estimation and Model Accuracy
The pose-estimation improvement achieved by the
proposed methods is indirectly enabled by the accu-
racy enhancement of the synthetic 3D model. A more
accurate 3D model can elevate the result of the pose-
estimation algorithm by providing more details of the
3D geometry. In turn, a more precise estimation of
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
364
pose increases quality and accuracy of the 3D model.
In the following paragraphs, we illustrate this mutual
dependence between the 3D model quality and pose-
estimation accuracy.
As an extreme case, in the f1 plant dataset the
pose trajectories and the snapshots of the correspond-
ing meshes obtained by the DA, DASS, and the origi-
nal KinFu methods are depicted in Figures 3 and 4,
respectively. The pose trajectories for the DA and
DASS methods are relatively close, while the former
performs better. The synthetic 3D model obtained by
the DA is more accurate and contains more details
compared to one obtained by the DASS method. For
the KinFu method, the destruction of the 3D model is
caused by the appearance of large errors in pose esti-
mation.
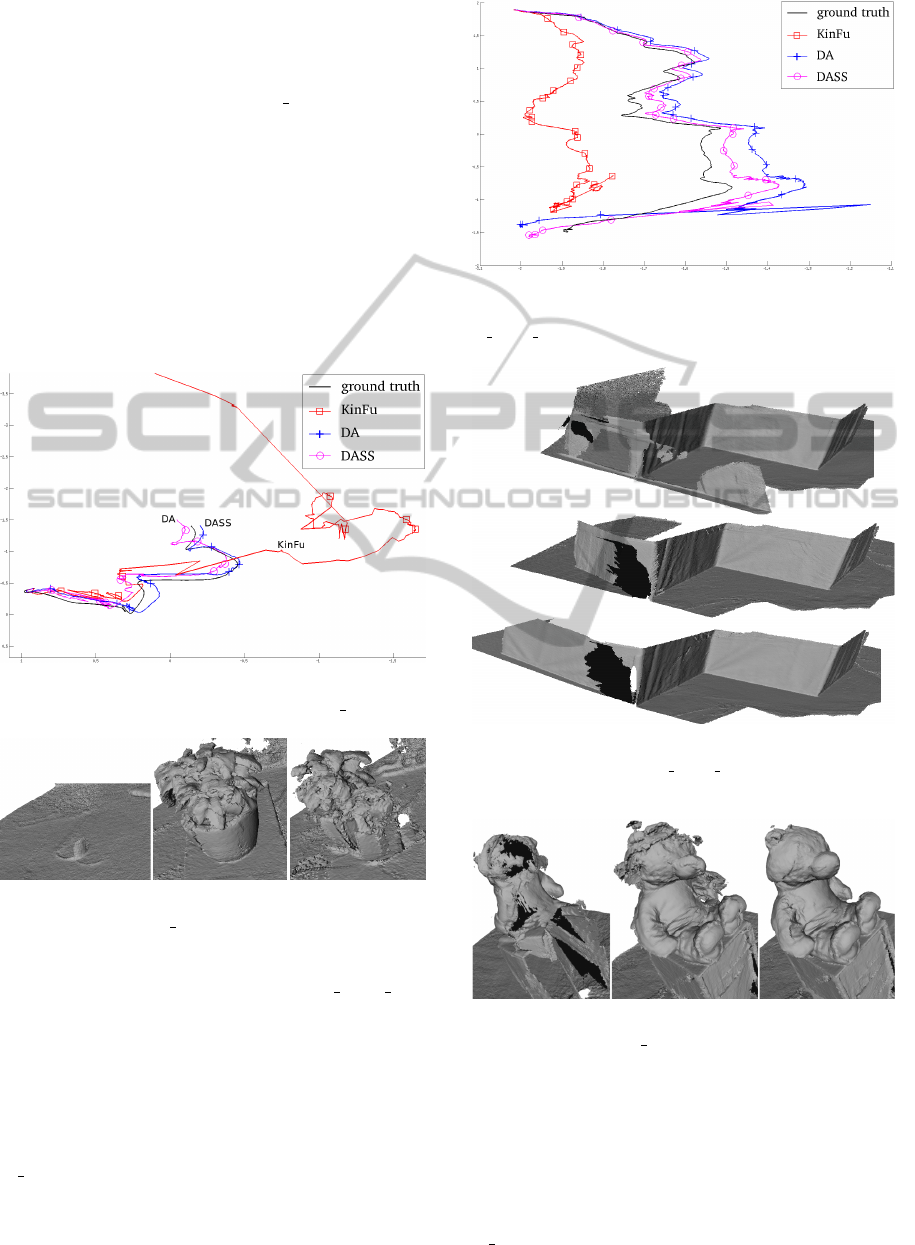
Figure 3: Camera pose trajectories for the DA, DASS, and
original KinFu compared to the ground truth (f1 plant data).
Figure 4: From left to right: snapshots of the final 3D syn-
thetic meshes for the f1 plant dataset obtained by the origi-
nal KinFu, DA, and DASS methods, respectively.
Regarding the moderate case of the f3 notex near
dataset as shown in Figures 5 and 6, there are no sig-
nificant deformations in the corresponding meshes of
the DA and DASS methods, while for the KinFu, ap-
pearance of a false object significantly deforms the
3D model. This is reflected as a huge drift in the cor-
responding pose trajectories of the original KinFu.
Figure 7 depicts the corresponding meshes for the
f3
teddy dataset, where the original weighting strat-
egy of the KinFu outperforms the DA method in terms
of RPE. According to the slightly more improved
ATE, the corresponding 3D model of the DA method
Figure 5: Camera pose trajectories for the DA, DASS,
and original KinFu compared to the ground truth for the
f3 notex near dataset.
Figure 6: From top to bottom: snapshots of the final 3D
synthetic meshes for the f3 notex near dataset obtained by
the original KinFu, DA, and DASS methods, respectively.
Figure 7: From left to right: snapshots of the final 3D syn-
thetic meshes for the f3 teddy dataset obtained by the orig-
inal KinFu, DA, and DASS methods, respectively.
is less deformed compared to the one obtained by the
original KinFu method. As shown, the DASS method
leads to the best 3D model and the smallest ATE and
RPE errors.
Another extreme case occurs in Figure 8, which il-
lustrates the snapshots of the obtained meshes for the
f2 desk dataset, in which the original weighting strat-
ImprovedICP-basedPoseEstimationbyDistance-aware3DMapping
365

Figure 8: From left to right: snapshots of the final 3D synthetic meshes for the f2 desk dataset obtained by the original KinFu,
DA, and DASS methods, respectively. (Note the differences between the objects on the table and the ball object at the left.)
egy of the KinFu outperforms the other methods in
terms of ATE. The minor 2.99% and 5.39% increase
of the ATE is compensated by a much larger reduction
of the RPE with 11.65% and 10.40% for the DA and
DASS methods, respectively. As a consequence, the
3D model accuracy is elevated by the DA and DASS
methods as visualized.
5 CONCLUSIONS
We have proposed intelligent distance-aware weight-
ing strategies for the Truncated Signed Distance
Function (TSDF) voxel-based model to enhance
3D reconstruction model quality. The increased
model quality leads to an improvement of the pose-
estimation algorithm by providing more accurate
data. In conventional TSDF, every newly sensed
depth value is directly integrated into the 3D model,
so that, when using low-cost depth sensors, less ac-
curate depth data can overwrite more accurate data.
For distance-aware weighting, we have considered
weight definition and model updating to be essen-
tial aspects. These aspects are combined into our
new proposed weighting strategies, Distance-Aware
(DA) and Distance-Aware Slow-Saturation (DASS)
methods, to intelligently integrate the depth data into
the synthetic 3D model, according to the distance-
sensitivity metric of the sensor. Both the DA and
DASS methods prevent the already-fused data to be
overwritten by less accurate data.
We have compared the resulting pose trajecto-
ries of the DA, DASS, and the original KinFu meth-
ods to the corresponding ground-truth trajectory in
terms of Absolute Pose Error (ATE) and Relative
Pose Error (RPE). Based on the quantitative results
on 17 datasets, we have found that on the average,
the DA and DASS methods compared to the origi-
nal KinFu, reduce the pose estimation error in terms
of the ATE by 16.37% and 43.40%, respectively. In
terms of the RPE, the achieved improvements for the
DA and DASS methods are 26.06% and 48.29%, re-
spectively. In extreme cases the improvements in ATE
and RPE can grow even up to 93.12% and 92.26% for
DA and 90.16% and 88.81% for DASS, respectively.
An interesting observation is that the DA and
DASS methods reduce the RPE more efficiently than
the ATE, which is explained by the ATE being an ap-
propriate metric to express the performance of visual
SLAM systems, whereas the RPE measures the drift
of a visual odometry system. Since there is no loop-
closure detection in the original KinFu, the ATE suf-
fers from this, whereas locally improved quality and
accuracy of the 3D model, leads to a better perfor-
mance of the ICP as a pose estimator. Hence, the drift
error in the poses reduced so that the RTE reduction
is more significant than the ATE. Using all datasets
on the average, the DA and DASS methods improve
the pose-estimation process of the original KinFu by
21.22% and 45.84%, respectively.
We have shown visually that in some cases, which
the original KinFu destroys the final synthetic 3D
model or deforms it, the DA and DASS methods are
sufficiently robust to preserve model reconstruction.
We have found that there is a clear mutual dependence
between the pose-estimation accuracy and the quality
of the 3D model. This can be exploited to enhance
either the pose estimation or the 3D model quality,
depending on the application or interest.
In the near future, this research work can be fur-
ther improved in several ways. First, a more efficient
model implementation in memory, such as Octree-
based structures, can help to suppress the fast satu-
ration of the accumulated weight in the DA method.
Second, the research on weighting strategies can be
enhanced with angle-aware and texture-aware meth-
ods, besides distance-awareness. For example, when
exploring the texture-aware strategy, we may exploit
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
366

the RGB information along with the depth data to el-
evate the 3D model quality.
ACKNOWLEDGEMENTS
This research has been performed within the
PANORAMA project, co-funded by grants from Bel-
gium, Italy, France, the Netherlands, the United King-
dom, and the ENIAC Joint Undertaking.
REFERENCES
Andersen, V., Aans, H., and Brentzen, J. A. (2010). Sur-
fel based geometry reconstruction. In Collomosse,
J. P. and Grimstead, I. J., editors, Theory and Prac-
tice of Computer Graphics, Sheffield, United King-
dom, 2010. Proceedings, pages 39–44.
Besl, P. and McKay, N. (1992). A method for registration
of 3-d shapes. IEEE Transaction on Pattern Analysis
and Machine Intelligence, 14(2):239–256.
Bondarev, E., Heredia, F., Favier, R., Ma, L., and de With,
P. H. N. (2013). On photo-realistic 3D reconstruction
of large-scale and arbitrary-shaped environments. In
CCNC, pages 621–624.
Bylow, E., Sturm, J., Kerl, C., Kahl, F., and Cremers, D.
(2013). Real-time camera tracking and 3D reconstruc-
tion using signed distance functions. In Proceedings
of Robotics: Science and Systems, Berlin, Germany.
Chang, J. Y., Park, H., Park, I. K., Lee, K. M., and Lee, S. U.
(2011). Gpu-friendly multi-view stereo reconstruction
using surfel representation and graph cuts. Comput.
Vis. Image Underst., 115(5):620–634.
Chow, J., Ang, K., Lichti, D., and Teskey, W. (2012). Per-
formance analysis of a low-cost triangulation-based
3d camera: Microsoft kinect system. In ISPRS12,
pages XXXIX–B5:175–180.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In ACM
SIGGRAPH Conference Proceedings. ACM.
Endres, F., Hess, J., Engelhard, N., Sturm, J., Cremers, D.,
and Burgard, W. (2012). An evaluation of the rgb-
d slam system. In Robotics and Automation (ICRA),
2012 IEEE Int. Conf. on, pages 1691–1696. IEEE.
Engelhard, N., Endres, F., Hess, J., Sturm, J., and Burgard,
W. (2011). Real-time 3D visual slam with a hand-held
camera. In Proc. of the RGB-D Workshop on 3D Per-
ception in Robotics at the European Robotics Forum,
Vasteras, Sweden.
Henry, P., Krainin, M., Herbst, E., Ren, X., and Fox, D.
(2010). Rgb-d mapping: Using depth cameras for
dense 3D modeling of indoor environments. the 12th
Int. Symposium on Experimental Robotics (ISER).
Henry, P., Krainin, M., Herbst, E., Ren, X., and Fox, D.
(2012). RGB-D mapping: Using kinect-style depth
cameras for dense 3D modeling of indoor environ-
ments. Int. Journ. Robotics Research, 31(5):647–663.
Hornung, A., Wurm, K. M., Bennewitz, M., Stachniss, C.,
and Burgard, W. (2013). OctoMap: An efficient prob-
abilistic 3D mapping framework based on octrees. Au-
tonomous Robots.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., and Fitzgibbon, A. (2011). Kinectfusion:
real-time 3D reconstruction and interaction using a
moving depth camera. In Proc. 24th annual ACM
Symp. User interface software and technology, UIST
’11, pages 559–568, New York, NY, USA. ACM.
Khoshelham, K. (2011). Accuracy analysis of kinect depth
data. ISPRS Workshop Laser Scanning, 38:1.
Khoshelham, K. and Elberink, S. O. (2012). Accuracy and
resolution of kinect depth data for indoor mapping ap-
plications. Sensors, 12(2):1437–1454.
Kubacki, D. B., Bui, H. Q., Babacan, S. D., and Do, M. N.
(2012). Registration and integration of multiple depth
images using signed distance function.
K
¨
ummerle, R., Grisetti, G., Strasdat, H., Konolige, K.,
and Burgard, W. (2011). g2o: A general framework
for graph optimization. In Robotics and Automation
(ICRA), IEEE Int. Conf. on, pages 3607–3613. IEEE.
Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D.,
Kim, D., Davison, A. J., Kohli, P., Shotton, J., Hodges,
S., and Fitzgibbon, A. (2011a). Kinectfusion: Real-
time dense surface mapping and tracking. In Proceed-
ing of 10th IEEE International Symposium on Mixed
and Augmented Reality, ISMAR ’11, pages 127–136,
Washington, DC, USA. IEEE Computer Society.
Newcombe, R. A., Lovegrove, S., and Davison, A. J.
(2011b). Dtam: Dense tracking and mapping in real-
time. In Metaxas, D. N., Quan, L., Sanfeliu, A., and
Gool, L. J. V., editors, ICCV, pages 2320–2327. IEEE.
PCL (2011). Kinectfusion implementation in the PCL.
http://svn.pointclouds.org/pcl/trunk/.
Ren, C. Y. and Reid, I. (2012). A unified energy minimiza-
tion framework for model fitting in depth. In Com-
puter Vision–ECCV 2012. Workshops and Demonstra-
tions, pages 72–82. Springer.
Rusu, R. B. and Cousins, S. (2011). 3D is here: Point Cloud
Library (PCL). In IEEE International Conference on
Robotics and Automation (ICRA), Shanghai, China.
Sturm, J., Engelhard, N., Endres, F., Burgard, W., and Cre-
mers, D. (2012). A benchmark for the evaluation of
rgb-d slam systems. In Intelligent Robots and Systems
(IROS), IEEE/RSJ Int. Conf. on, pages 573–580.
Whelan, T., Johannsson, H., Kaess, M., Leonard, J. J., and
McDonald, J. (2013). Robust real-time visual odom-
etry for dense rgb-d mapping. In IEEE International
Conference on Robotics and Automation, ICRA.
Whelan, T., Kaess, M., Fallon, M., Johannsson, H.,
Leonard, J., and McDonald, J. (2012). Kintinuous:
Spatially extended KinectFusion. In RSS Workshop on
RGB-D: Advanced Reasoning with Depth Cameras,
Sydney, Australia.
Zeng, M., Zhao, F., Zheng, J., and Liu, X. (2012). A
memory-efficient kinectfusion using octree. In Pro-
ceedings of the First international conference on
Computational Visual Media, CVM’12, pages 234–
241, Berlin, Heidelberg. Springer-Verlag.
ImprovedICP-basedPoseEstimationbyDistance-aware3DMapping
367
