
Peer Synchronization Method for Wireless Sensor Networks using
Heterogeneous Bluetooth Sensor Nodes
Steffen Dalgard, Franck Fleurey and Anders E. Liverud
SINTEF, Oslo, Norway
Keywords: Time Synchronization, Wireless Information Networks, Remote Sensing, Bluetooth, Bluetooth Smart,
Wireless Sensor Network.
Abstract: Synchronization of time is essential for correlation of sensor data. For body area network the sensors are
distributed over multiple sensor nodes located on different parts of the body. When collecting sensor data
using wireless sensor networks, the delay variation can be up to 1000 milliseconds. Physiological sensors,
like ECG, accelerometer and gyroscopes, require a timing accuracy in the millisecond range. This paper
describes a generic method to provide synchronized timestamps. The method is tested in a Wireless sensor
network using Bluetooth and Bluetooth Smart sensor nodes. Results show that the method is usable for
correlating sensor data with 50ms sample rate.
1 INTRODUCTION
Distributed multi sensor systems are gathering
physical measurements from multiple sensor nodes.
The measurements need to have a common timeline
for analysis and sensor fusion. Applications using
electrocardiogram (ECG), blood pressure sensors,
electromyography (EMG) and
accelerometer/gyroscopes often call for a timeline
with millisecond (ms) precision.
Wireless sensor networks are much used to
gather measurements from different sensor nodes in
distributed multi sensor systems. Sensor nodes
measure, process and transmit measurements to a
hub node for further analysis and data fusion. Each
measurement sample usually has timing information
attached, called timestamp.
If there is a predictable timing in the wireless
sensor network, the timestamp can be added at the
hub node. The hub node does usually have a time of
day clock reference that can be used for the
timestamp. However wireless sensor networks such
as Bluetooth don’t have deterministic timing
characteristics, both delays and delay variations are
unpredictable. This makes timestamp at millisecond
precision impossible to achieve when added at the
hub node.
Timestamp has to be added at the sensor node
doing the measurement to improve the accuracy.
This puts requirement on the sensor node to have a
synchronized clock with the hub node. Often the
sensor node is a highly integrated embedded
microcontroller with a free running clock counting
milliseconds since start-up. The processing capacity
is limited and there is no room for an additional time
of day clock component.
This paper introduces a method for achieving a
system synchronized timestamp from sensor nodes
realized using simple embedded microcontroller
with little processing and no need for additional
components. The method only use unicast peer
communication provided by all wireless sensor
networks. This enables the method to span different
network technologies when needed, making the
method useful for heterogeneous networks. The
implementation described in this paper shows this by
combining Bluetooth and Bluetooth Smart sensor
nodes in a synchronized system.
Relation to other synchronization methods is
presented in chapter 2. The method is described in
chapter 3. Implementation and test setup is described
in chapter 4. Results, conclusions and improvements
are presented in chapter 5 and 6.
2 CLOCK SYNCHRONIZATION
METHODS
Many synchronization methods are described in
175
Dalgard S., Fleurey F. and E. Liverud A..
Peer Synchronization Method for Wireless Sensor Networks using Heterogeneous Bluetooth Sensor Nodes.
DOI: 10.5220/0004696701750180
In Proceedings of the 3rd International Conference on Sensor Networks (SENSORNETS-2014), pages 175-180
ISBN: 978-989-758-001-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
literature, and a thorough description can be found
in (Elson, 2003). Most of the methods are not easily
portable to embedded microcontrollers without
dedicated clock components. The accuracy for many
of the methods is in the microsecond range, making
the implementation costly. Broadcast protocols are
often used; this is generally not available for
Bluetooth.
Bluetooth systems do have a clock used as base
for the frequency hopping (312,5us) to synchronize
the different nodes. This is a very precise clock, but
few Bluetooth modules and protocol stacks provide
access to this clock through the application interface.
Clock synchronization methods using this clock can
be found in (Bluetooth 2009) and (Casas, 2005). The
method described in this paper use a peer protocol
and does not need access to the Bluetooth clock.
Network Time Protocol (NTP) (Mills, 2010) is
widely used for synchronizing computers in an IP-
network. Poll packets are sent over the network and
a number of time of day slave clocks are
synchronized to a time of day master clock through a
hierarchy. It is highly optimized to reduce the
number of poll packets sent which is important for
scalability. A poll rate slower than 10 minutes puts
requirement on active clock adjustments at each
slave to compensate for oscillator drift between each
poll. To implement NTP an additional clock
component is needed. The method described in this
paper does not need active clock adjustment of the
slave clock, and time of day clock functionality is
not needed. This simplifies the implementation of
the sensor node software and no additional clock
component is needed.
3 DESCRIPTION OF
SYNCHRONIZATION METHOD
The method is a peer protocol synchronizing a sync
master and a sync slave. The method is based on the
poll sequence as described in (Mills, 2010). The
goal is to calculate an offset value that can be used
to convert the slave timestamp to a master
timestamp. By adding the offset to the slave
timestamp, the timestamp is converted from slave
clock to master clock timeline (1).
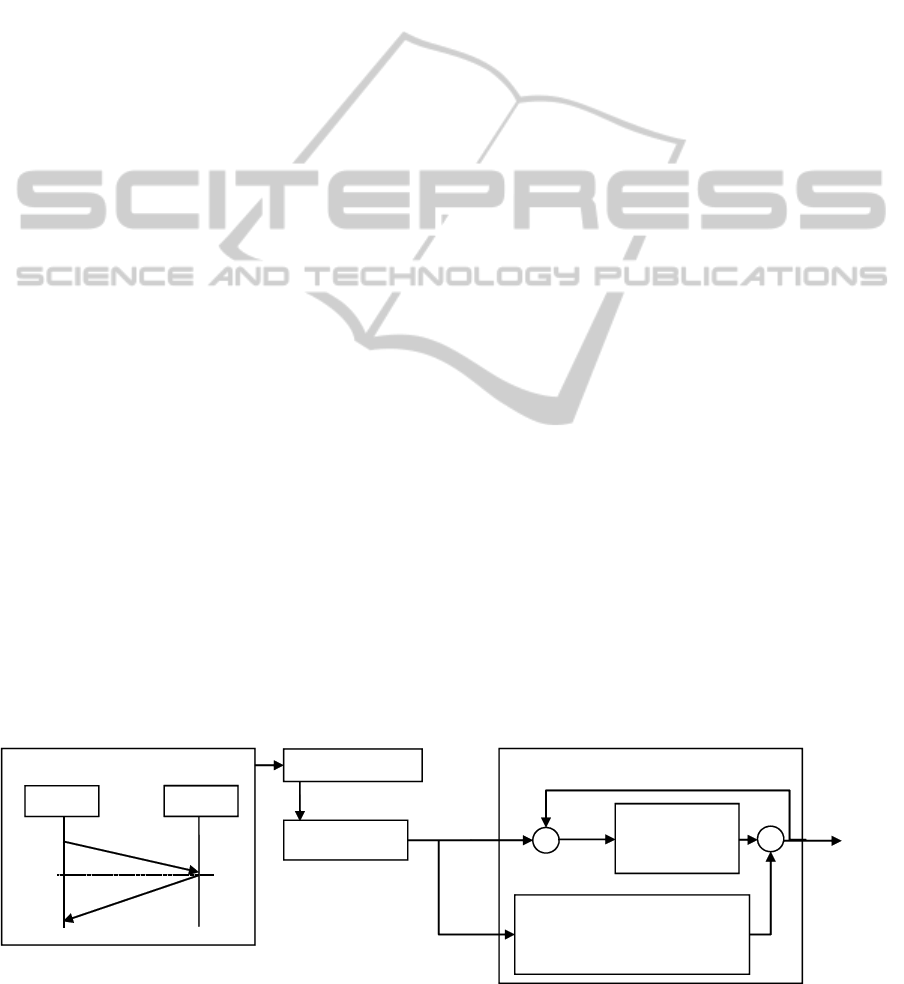
The master initiates a poll sequence at regular
intervals. The slave is replying with its local slave
clock time when polled. The master will run the
offset calculator using equations (2) and (3),
calculating an offset between the two clocks based
on three time values; transmission of request (TMT)
and reception of reply (TMR) using master clock
and the time for reception of request at the slave
(TS) using local slave clock. This is a simplification
reducing the amount of data compared to (Mills,
2010) where the slave reply delay is added to (2).
This simplification is ok if slave response is
insignificant compared to other errors.
TM
n
(TS
n
) = TS
n
+ Offset
n
(1)
D
n
= (TMR
n
– TMT
n
) / 2
(2)
Offset
n
= TMT
n
+ D
n
- TS
n
(3)
The transmission delay D is the time used for
sending the request from master to slave. It is
estimated to be half of the time between TMT and
TMR; hence symmetrical transmission delay is
assumed. Asymmetric delay is a significant error
source. The variance of the calculated offset (3) is
normally best for the lowest delays (2). By plotting
the calculated delay and offset from many poll
sequences in a XY-graph a statistical spread can be
analysed. See more about this in the result section.
More detailed information can be found in (Mills,
2010) and (Clock, 2012).
Each poll sequence produce a calculated offset
(Offset
n
) value based on (2) and (3). Due to delay
variation in the wireless network the calculated
offset will result in unacceptable large jitter. The
calculated offset from each poll sequence is fed
through a number of steps to calculate a
I-regulator
Offset calculator
(TMT
n
, TMR
n
, TS
n,
Offset
n
)
Rejection filter
(Offset
m
)
/10
+
+
RegOffset
err
m
-
Poll sequence
Maste
r
Slave
TMT
n
TMR
n
TS
n
Reply(TS
n
)
Request
TM(TS
n
)
Figure 1: Block diagram showing the steps used for calculating a stable RegOffset.
SENSORNETS2014-InternationalConferenceonSensorNetworks
176
sufficient stable offset (RegOffset). These steps are
shown in Figure 1 and described in the next
paragraphs.
A rejection filter evaluates each calculated offset
value to find whether it is usable for further
processing. Some values may be completely off
scale due to transient delays in the network. These
values have to be rejected. The accepted offset
values (Offset
m
) are fed into an I-regulator.
The I-regulator compares each accepted offset
value with the current stable offset (RegOffset). The
comparison is a feedback path that enables the
regulator to track the clock drift changes between
master and slave. The error is accumulated in the
regulator. The RegOffset value is calculated by
multiplying accumulated error with the integration
factor ki. RegOffset is calculated for each accepted
offset value, but its value will not change at each
calculation. The RegOffset changes so slowly that it
is usable for calculating timestamps using (4). Each
time a measurement is done its timestamp can be
converted using (4) at the cost of one integer
addition.
TM
meas
(TS
meas
) = TS
meas
+ RegOffset (4)
To speed up the I-regulator at start-up, an initial
offset (ZeroOffs) is calculated. The average of the
first 10 accepted offset values is used. An average is
needed to compensate for the delay variation in the
network. When the ZeroOffset is calculated the rest
of the accepted offset values will be fed to the
comparator.
The poll rate together with the integration factor
ki decides the responsiveness of the regulator. The
integration factor ki can be in the (0,01..0,1) range in
order to integrate over 100 to 10 samples. A small ki
will use longer time to track, and this can be
observed as a constant lag error when oscillator drift
is large. The selection of ki decides the jitter, i.e.
change of RegOffset generated for each poll. A
monotonically increasing timestamp can be achieved
by having the RegOffset peak change less than half
the measurement sample rate.
The master can be implemented using integer
math. The integer size depends on the resolution and
timespan the implementation needs to cover.
The implementation of the master can be done at
the hub node or at the sensor node. Implementation
at the hub node will leave a minimum footprint at
the sensor node. The hub mode time format can be
invisible for the sensor node. This is convenient if
the sensor node needs to be time format agnostic. As
long as the number of master instances at the hub
node not causes problem, master at hub node is the
most flexible configuration.
Implementation of the master at the sensor node will
scale better for large configurations, where the hub
node gets measurements with ready calculated
timestamps. Equation (4) need to be reordered for
this configuration since TM needs to be converted to
TS.
4 IMPLEMENTATION AND
SETUP
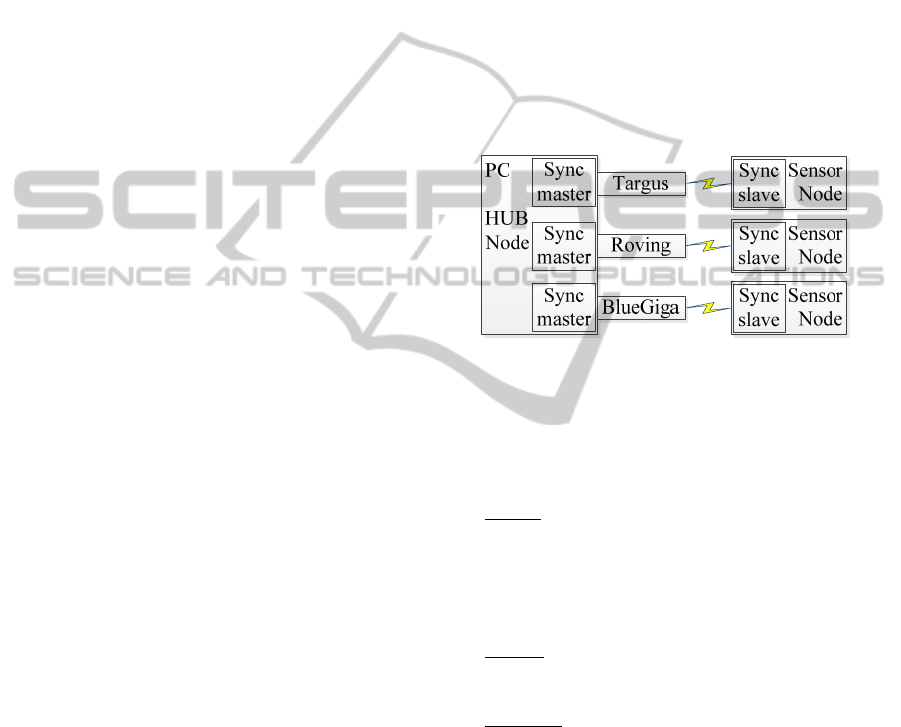
The experimental implementation described has a
PC as master and hub node and three embedded
microcontrollers as slaves and sensor nodes. The
setup is shown in Figure 2.
Figure 2: Setup with PC and three sensor nodes.
The master is implemented in Java running on a
MS Windows 7 PC. This is convenient for logging
of data for later analysis. Three sensor nodes using
different Bluetooth connections have been used;
Targus USB dongle with a Bluetooth host stack
running on the PC. Sensor node is using an ARM
CORTEX-M3 processors and a WT12 Bluetooth
module from BlueGiga running Serial Port Profile
(SPP) connected with a serial interface to the ARM
processor (Strisland, 2013).
Roving module with Bluetooth stack running on
module connected to the PC using FTDI serial
interface. Sensor node same as for Targus.
BlueGiga BLE112 USB dongle with Bluetooth
Smart stack running in the dongle. Sensor node is
using an ARM CORTEX-M3 processor and
nRF8001 Bluetooth Smart IC from Nordic
Semiconductor (Liverud, 2012).
The local clock for all sensor nodes is a crystal
producing 4ms ticks. All three sensor nodes have
been running simultaneously with various
measurements such as gyroscope and raw ECG. The
accuracy of the synchronization has been measured
by forcing a simultaneous rotation to the three nodes
and analysing the gyroscope measurements.
Poll sequence rate is set to 250 milliseconds and
PeerSynchronizationMethodforWirelessSensorNetworksusingHeterogeneousBluetoothSensorNodes
177
the integration factor ki is set to 1/64. Given an
ideal network without delay variation and total clock
drift at 50ppm, these parameters will give a constant
lag error at ~0,8ms. Delay variation in the network
will increase this error.
The prototype implementation of the master is
written in Java. Java is chosen for easy portability
between different operating systems and easy
distribution to different machines. The Java code is
available at (Open, 2013).
5 RESULTS
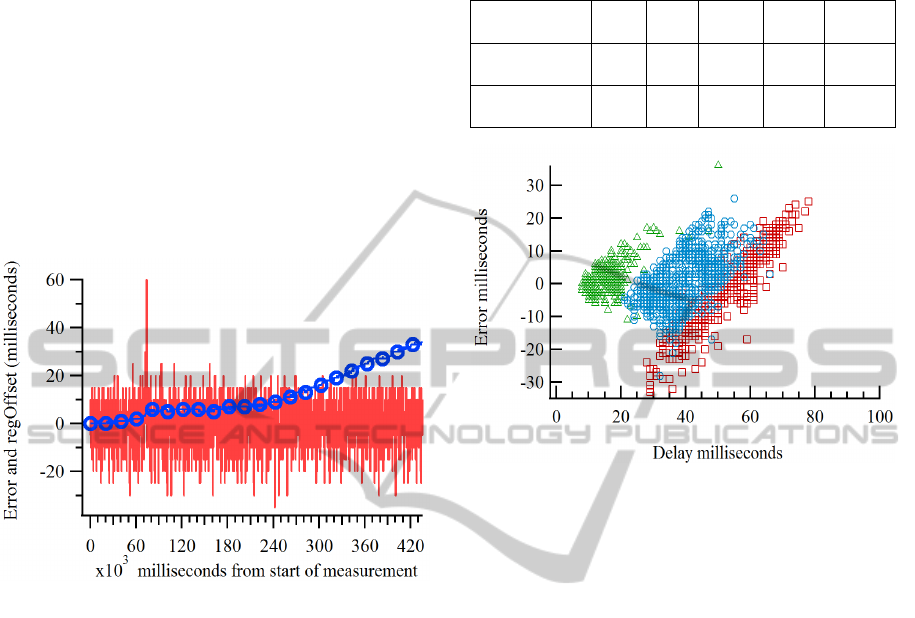
Figure 3: Error value (red line) fed to the integrator.
RegOffset value (blue circles) trend line delivered from
the regulator. Value shifted to zero at start of graph.
The RegOffset trend line in Figure 3 (blue line)
shows a typical trend over 7 minutes having 35ms
drift (35ms/7min => 83ppm). The error value fed to
the integrator in Figure 3 shows typical jitter on the
offset from each poll. There will be deviating polls
slipping through the rejection filter generating large
error values, but a ki=1/64 will attenuate these.
The tests show that the integration factor ki is
worth tuning. A low value results in low jitter for
RegOffset, but leads to long integration time. In our
experiment application there was a 4ms sample rate
and the jitter on the regOffset for one poll had to be
smaller than 2ms. A too large change in RegOffset
could produce timestamps out of sequence.
Table 1 shows jitter on RegOffset for different ki
values based on data using Targus dongle and one
sensor node. The values show that the jitter
produced by one poll could be in the range of 1ms
for ki less than 0,025 for a reasonable filter.
The formula for calculating the offset is based on
the assumption that the delay for request (DMS) and
Table 1: Jitter on RegOffset (milliseconds) for different ki
values based on data using Targus dongle and one sensor
node.
ΔRegOffset
(ms)
Ki=
0,1
Ki=
0,05
Ki=
0,025
Ki=
0,01
Ki=
0,005
1 poll max
min
3,3
-3,9
1,5
-1,9
0,8
-1,0
0,3
-0,4
0,2
-0,2
4 polls max
min
7,7
-7,2
3,8
-3,9
1,8
-2,1
0,7
-0,9
0,4
-0,4
Figure 4: Scatter diagram showing the spread of the
calculated error(offset) versus delay. Targus (blue circles),
Roving (red squares) and BlueGiga (green triangles).
reply (DSM) is symmetrical. The scatter diagram
Figure 4 is a x-y plot of the calculated delay and
error(offset) calculated by the offset calculator after
each poll sequence. The calculated offset is more
correct when the delay is low. A symmetrical delay
distribution should be a symmetric conical shape
with leftmost corner aligned at error=0.
Asymmetrical delays will result in other shapes with
an error offset. The error offset is a result of the I-
regulator behaviour that will average the spread
around error=0.
As shown in the diagram, each of the three
connections Targus, Roving and BlueGiga have very
different delay / offset distribution. Targus has a
fairly symmetrical distribution in the range 20-40ms
and an error offset of -5ms. Roving is not symmetric
at all and has an error offset of -30ms. BlueGiga has
symmetrical distribution and an offset of -1ms. The
error offset is important since it will cause a time
offset in conversion of the timestamps.
As a proof of concept we mounted the three
sensor nodes on a common bar. Data from the three
sensor nodes are flowing through each of the three
dongles to simulate different networks. By quickly
rotating the bar 180deg we could identify the
rotation in the gyroscope measurements and analyse
errors in the timing. The sample rate for the
SENSORNETS2014-InternationalConferenceonSensorNetworks
178
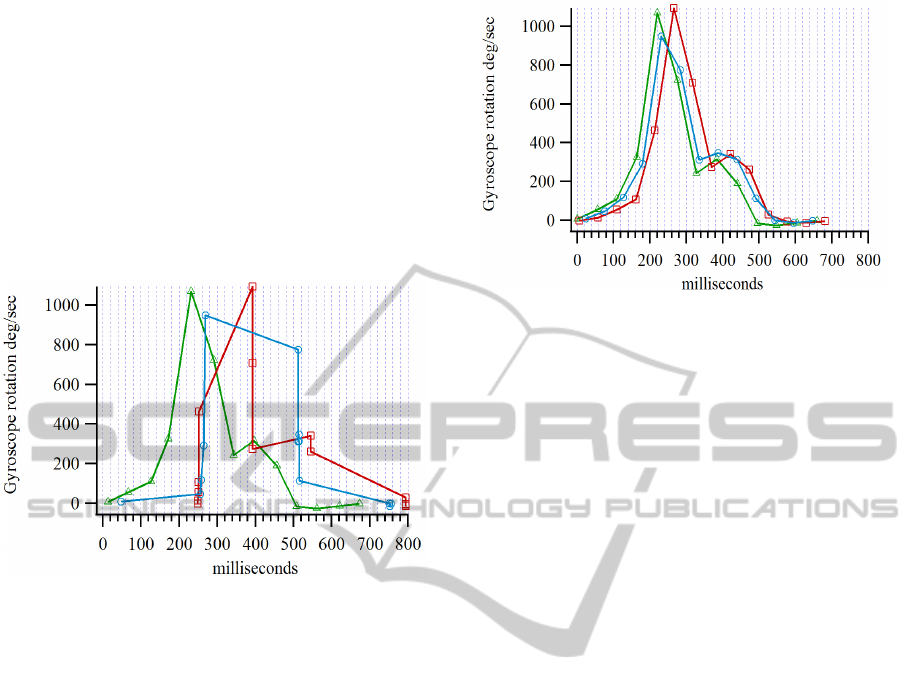
gyroscopes is 52 ms. Figure 5 shows gyroscope data
from the three sensor nodes. The data is plotted
using timestamp added by the hub node produced by
the Java application on the PC using the PC clock.
This is the typical approach without synchronized
clocks. The total plot spans over 800ms although the
rotation only last for 550ms. The plot shows that the
measurement data are shifted and chucked. Many
data samples at the same time are caused by buffers
emptied in bursts to the Java application. It is not
possible to see that they represent the same physical
rotation.
Figure 5: Gyroscope data from the three sensor nodes. The
data is plotted using the hub node reception timestamp in
ms produced by the Java application on the PC. Targus
(blue circles), Roving (red squares) and BlueGiga (green
triangles).
In Figure 6 the same data are plotted using
timestamp from the sensor nodes. The timestamp
values are calculated using (4). The result is
timestamps according to the PC clock. Now that the
timestamps are on a common timeline they can be
correlated. By comparing the two graphs the delay
for each sample can be deduced. Delays up to 200ms
are normal, and delays up to 1000ms are registered
during the experiment.
The time offsets between the Roving (red) and
Targus (blue) curves in Figure 6 are in the range of
25ms. Since these sensor nodes are identical, it is
reasonable to assume that the offset is due to the
different Bluetooth connections and the
synchronization method. The observed offset
correlates with the error offset that can be observed
in the scatter diagram Figure 4, where the red and
blue areas have an offset in the same range.
Experiments (not shown) with many sensor
nodes connected to the same Bluetooth dongle show
that the offset vs. delay spread has similar shape for
all sensor nodes. This results in a relative time offset
between the sensor nodes at about 10ms. This is
Figure 6: Gyroscope data from the three sensors. The data
is plotted using timestamp from the sensor nodes. Targus
(blue circles), Roving (red squares) and BlueGiga (green
triangles).
worth considering for homogenous networks.
6 CONCLUSIONS AND
DISCUSSION
The plot in Figure 6 shows that the synchronization
method is usable for correlating sample data with
50ms sample rate. This is sufficient for many
applications. The method both synchronizes and
tracks oscillator drift between the different clocks as
shown in Figure 3. The drift is typically in the 20-
100ppm range. The drift can vary over time due to
temperature changes. For a PC with temperature
controlled fan the drift will change when fan speed
changes.
The effects for the application are two fold,
firstly a proper timestamp is provided for each
sample from the sensor node. This enables multi
sensor data fusion for rapid changing signals.
Secondly, there is no need to optimize the hub node
software to make accurate timestamps. Such
optimization has shown to be hard for software
running on non-real-time systems as MS Windows
and Linux.
The effort adding synchronized timestamps for
sensor nodes is lowered by using the presented
method. Since the method is generic it can be
wrapped as a reusable object. The slave functionality
is only required to respond to the time request in the
poll sequence. By implementing the master at the
hub node the slave function can be implemented
with small effort at almost any sensor node with a
free running oscillator and a communication
channel.
PeerSynchronizationMethodforWirelessSensorNetworksusingHeterogeneousBluetoothSensorNodes
179

The method is tested in a non-homogenous network
using both Bluetooth SPP and Bluetooth Smart.
Since the method only uses unicast peer
communication it can be used in almost any network
system. This makes it flexible when combining
sensors from different vendors.
The poll rate can be made adaptable. The method
itself is not sensitive to poll rate or poll rate
deviation. It only integrates over available samples.
It is possible to have a high poll rate when
connecting and then reduce the rate when the
integrator has settled. The lag error due to the
oscillator drift will impose a lower limit for the poll
rate.
An additional shaping filter as the Huff-n'Puff
filter (Clock, 2012) used for asymmetrical delay
conditions may lower the observed offset shown in
the results. This may be used as an enhancement if
higher accuracy is needed in non-homogenous
networks.
ACKNOWLEDGEMENTS
The research leading to these results has received
founding from the European Commission as part of
the CORBYS (Cognitive Control Framework for
Robotic Systems) project under Seventh Framework
Programme contract FP7 ICT-270219. The views
expressed in this paper are those of the authors, and
not necessarily those of the consortium.
REFERENCES
Elson,Jeremy Eric, Time Synchronization in Wireless
Sensor Networks, 2003. University of California Los
Angeles http://lecs.cs.ucla.edu/~jelson/dissertation-
final.pdf.
Bluetooth SIG, Health Device Profile, Implementation
Guidance Whitepaper, 17 December 2009.
Casas R., et al., "Synchronization in Wireless Sensor
Networks Using Bluetooth,"in Intelligent Solutions in
Embedded Systems, 2005. Third International
Workshop on, 2005), pp.79-88.
Mills D. L., Network Time Protocol (version 4) Protocol
and Algorithm Specification, June. 2010, RFC-5905.
Martì Pau, Clock Synchronization for Networked Control
Systems Using Low-Cost Microcontrollers, Automatic
Control Department, Technical University of
Catalonia Research Report: ESAII-RR-08-02, 2008.
Clock Filter Algorithm (NTP) 14-Jun-2012
http://www.eecis.udel.edu/~mills/ntp/html/filter.html.
Strisland F,Svagård I, Seeberg T. M., Mathisen B. M.,
Vedum J, Austad H. O., Liverud A E., Kofod-Petersen
A., and Bendixen O. C., "ESUMS: A Mobile System
for Continuous Home Monitoring of Rehabilitation
Patients", Presented at EMBC 2013.
Liverud A. E, Vedum J, Fleurey F, and Seeberg T.M,
"Wearable Wireless Multi-parameter Sensor Module
for Physiological Monitoring," IOS Press, 2012, pp.
210-215.
Open source prototype implementation of the described
method named "rtsync" is available at
https://github.com/SINTEF-9012/rtsync.
SENSORNETS2014-InternationalConferenceonSensorNetworks
180
