
A Visibility Graph based Shape Decomposition Technique
Foteini Fotopoulou and Emmanouil Z. Psarakis
Department of Computer Engineering & Informatics, University of Patras, Rio-Patras, Greece
Keywords:
Shape Decomposition, Visibility Graph, Shared Neighbors.
Abstract:
In this paper, a new shape decomposition method named Visibility Shape Decomposition (VSD) is presented.
Inspired from an idealization of the visibility matrix having a block diagonal form, the definition of a neigh-
borhood based visibility graph is proposed and a two step iterative algorithm for its transformation into a
block diagonal form, that can be used for a visually meaningful decomposition of the candidate shape, is pre-
sented. Although the proposed technique is applied to shapes of the MPEG7 database, it can be extended to
3D objects. The preliminary results we have obtained are promising.
1 INTRODUCTION
Shape decomposition constitutes a vital procedure in
the field of computer vision, that is able to distin-
guish the different components of the original ob-
ject and split it into meaningfull components. Mean-
ingfull components are defined as parts that can be
perceptually distinguished from the remaining object.
Dividing a shape into its meaningful subparts has
gained much attention as it is useful in many appli-
cations including, but not limited to, shape compres-
sion, shape retrieval, shape analysis and shape match-
ing. Moreover, it is well known that decomposition
assists recognition of shapes with occluded or deleted
parts, inversely proportional growth of several parts,
moving parts etc. Thus, the decomposition of an arbi-
trary shape into its components constitutes a problem
of great interest.
In this paper the shape decomposition problem
is addressed and a novel decomposition technique,
referred to here as Visibility Shape Decomposition
(VSD) is proposed. The introduced method uses the
well established idea of visibility (De Berg et al.,
1997) among shape’s contour points and appropri-
ately achieves to organize boundary points into a
block-diagonal matrix, thus obtaining the shape de-
composition into meaningful components. More pre-
cisely, a two step algorithm that efficiently exploits
the visibility information and results in organizing the
boundary points into meaningful components is pro-
posed.
Let us consider a plane curve, that describes a
shape boundary, to be defined from the path traced
by the following N position vectors:
r(i) = (x(i), y(i)), i = 1, 2, ·· · , N. (1)
Then, we can form the following Visibility Graph
G
V
= (V , E, W ), where V , E, W are the nodes and
edges sets and a binary weighted matrix respec-
tively. More precisely, in this graph model of the
plane curve, nodes’ set V is defined as follows:
V = {r(i), i = 1, 2, · ·· , N} , (2)
and the w
ij
element of the N × N matrix W can be
defined as follows:
w
ij
=
(
1, if nodes i, j are visible
0, otherwise
(3)
where nodes i, j are considered as visible if, the fol-
lowing Visibility Rules hold:
• V R
1
: The connecting edge ε
ij
does not intersect
with the plane curve.
• V R
2
: The connecting edge ε
ij
is totally located
inside the plane curve.
The visibility between two points has been widely
studied in motion plan and computational geometry
(De Berg et al., 1997). Although in a 2D shape the
visibility between its boundary points can be easily
checked, an appropriate extension can be made for 3D
objects (Liu et al., 2011).
The introduced method originates from the idea
of visibility between boundary points i, j as it is de-
fined in Equ. (3). Obviously, the construction of such
a visibility graph G
V
is invariant to rigid deforma-
tions, such as shape rotation, translation and scal-
ing, since they do not affect neither the nodes nor the
515
Fotopoulou F. and Z. Psarakis E..
A Visibility Graph based Shape Decomposition Technique.
DOI: 10.5220/0004692005150522
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 515-522
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

edges positioning. The G
V
of the camel (Figure 1(a)),
obtained by the application of the above mentioned
Visibility Rules, is depicted in Figure 1(b). As it is
obvious the structure of this matrix does not facilitate
shape partitioning. An ideal matrix for shape decom-
position would have the form of a block-diagonalsim-
ilarity matrix, where its non-overlappingblocks could
represent the shape’s parts, in a sequential manner as
it is shown in Figure 1(c). The basic idea behind this
idealization is that each shape component can be rep-
resented by a block in the respective block-diagonal
matrix
1
. Thus, the shape decomposition problem can
be restated as follows: Given the visibility matrix W
construct a block diagonal matrix that best approxi-
mates the desired form.
In this work we propose a technique called VSD
for solving the above defined problem. In order to
achieve our goal the n-conditioned G
V
is introduced
and a two-step iterative algorithm is proposed for
transforming the original G
V
into the desired block-
diagonal form. Namely, in the first step of the pro-
posed algorithm we attempt to “extend” the near field
visibility by using a principle similar to the “shared
neighboors” according to which the similarity of two
nodes is confirmed by the number of their Shared
Nearest Neighbors (Jarvis and Patrick, 1973). This
procedure results in a Voting graph which constitutes
the focal matrix of our decomposition scheme. In
the second stage, an appropriate thresholding proce-
dure takes place which efficiently converts the above
mentioned matrix into a crisp one that is used as in-
put in the next iteration of the algorithm. This itera-
tive compactification procedure results in a block di-
agonal matrix, which best approximates the idealiza-
tion form and additionally delivers the structure of the
original shape appropriately organized into meaning-
ful groups.
Although the introduced decomposition method
does not apply the two major perception rules, i.e. the
minima rule (Singh et al., 1999b) and the short cut
rule (Singh et al., 1999a), the resulting shape cluster-
ing often corresponds well to decompositions that a
human might make. Comparisons with the state of art
methods validate that our method produces satisfac-
tory results.
The remaining of the paper is organized as fol-
lows: In Section 2 a literature overview is presented.
In Section 3 the introduced method is explained in de-
1
In order the ideal matrix to be block-diagonal, we
should start the decomposition from the beginning of a
group in the shape boundary. Otherwise, the first block of
the ideal matrix is divided into four sub-blocks covering the
four corners of the matrix. However, by taking into account
their similarity and for simplicity purposes, we do not dis-
tinguish between them.
(a)
0 50 100 150 200
0
50
100
150
200
(b)
0 50 100 150 200
0
50
100
150
200
(c) (d)
Figure 1: The camel-shape (a). The corresponding G
V
(b).
An ideal block diagonal matrix for the camel shape decom-
position (c). Each block in the diagonal representation de-
notes a specific shape component (d).
tail and in Section 4 experimental results are shown.
Finally the paper concludes in Section 5.
2 RELATED WORK
Shape segmentation is important in perceptual under-
standing of objects and facilitates recognition that is
robust to occlusions, movements, deletion or growth
of portions of an object (Biederman et al., 1987), (Sid-
diqi and Kimia, 1995). Shape decomposition tech-
niques, can be broadly classified into two main cate-
gories. In the first one methods that aim to partition
a shape into its meaningful parts belong, while in the
second shapes are segmented usually by following a
certain geometric rule.
Determination of a shape part as natural is not ob-
vious due to the involvementof the human perception.
However, there exist two major rules that exploit the
results of the cognitive theory over the human’s iden-
tification of a shape. In (Singh et al., 1999b) a set of
cuts is defined, such that their endpoints denote nega-
tive minima of curvature of the corresponding bound-
ary. Continuing, in (Singh et al., 1999a) -which com-
plements the minima rule- cuts are selected according
to their length.
In (Latecki and Lak¨amper,1999) a 2D shape is de-
composed into its convex parts, at different evolution
steps, using a rule similar to minima rule. In addi-
tion, the method proposed in (Mi and DeCarlo, 2007)
is specially designed for decomposing a shape into its
meaningful parts. In (Juengling and Mitchell, 2007)
the minima and short-cut rules are used for shape de-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
516
composition. In particular, a constrained Delaunay
triangulation of the shape is computed and an opti-
mum set of cuts (i.e. interior edges) is selected, by
solving a combinatorial optimization problem.
On the other hand, methods that decompose a
shape into certain geometric models usually refer to
convex parts decomposition. However, decomposi-
tion of a shape to strictly convex parts, often results in
an uncontrollablenumber of segments. Consequently,
approximate convex parts are used instead. In (Lien
and Amato, 2004) polygons are decomposed in an hi-
erarchical way, by iteratively removing the most sig-
nificant non-convex parts. Authors of this paper in-
dicate the facility of computing approximate convex
segments opposed to exactly convex ones. In (Liu
et al., 2010) candidate cuts are computed by Morse
theory and their total length is minimized. In order
to avoid production of redundant parts while resulting
in natural shape decomposition, in (Ren et al., 2011)
the selection of the best set of candidate cuts that has
both a minimum size and a high visual naturalness is
proposed. The latter property is obtained by imposing
the minima rule and the short cut rule. In (Siddiqi and
Kimia, 1995) it is reported that convex parts depict in
some way the human’s conception towards decompo-
sition activities. Therefore, both (Liu et al., 2010) ,
(Ren et al., 2011) fall into both main shape decompo-
sition categories and they aim to result in meaningful
shape partitioning.
Other methods (De Goes et al., 2008) exploit the
multiscale properties of diffusion distance, in an at-
tempt to achieve robust shape decomposition in ar-
ticulated objects. In (Shapiro and Haralick, 1979) a
graph theoretic clustering method is introduced where
a 2D shape is partitioned into clusters that intuitively
correspond to shape parts. Our method is based on
a clustering technique where as we are going to see
clusters’ similarity is assessed according to an appro-
priate voting procedure.
3 THE VSD METHOD
Let us consider that the visibility matrix mentioned
in Section 1, is given. Then, the proposed method
aims at appropriately transforming the original visi-
bility matrix into a block diagonal one, which can be
easily used for the visually meaningful decomposi-
tion of the candidate shape. However, as it was al-
ready mentioned, the form of the original visibility
matrix is not appropriate to serve our goal, and must
be properly transformed. This is exactly the goal of
the following subsection.
3.1 Neighborhood Based Visibility
A shape can be easily transformed into a graph,
where the boundary points stand for the graph’s nodes
and the edges are the lines connecting those nodes.
However, such a graph has no physical significance,
due to the fact that many nodes are connected even
though they do not “see” each other. Assuming an
observer placed at each node, a more natural re-
sult could be obtained by linking the nodes that fall
within the observer’s field of view. According to the
Visibility Rules of Section 1, a node pair is defined
as visible if its corresponding edge does not intersect
with the contour and locates inside the area enclosed
by the contour. It is clearly shown in Figure 2(a)
where nodes 1, 2 form a visible pair, while nodes 1,3
and nodes 1,4 are not visible.
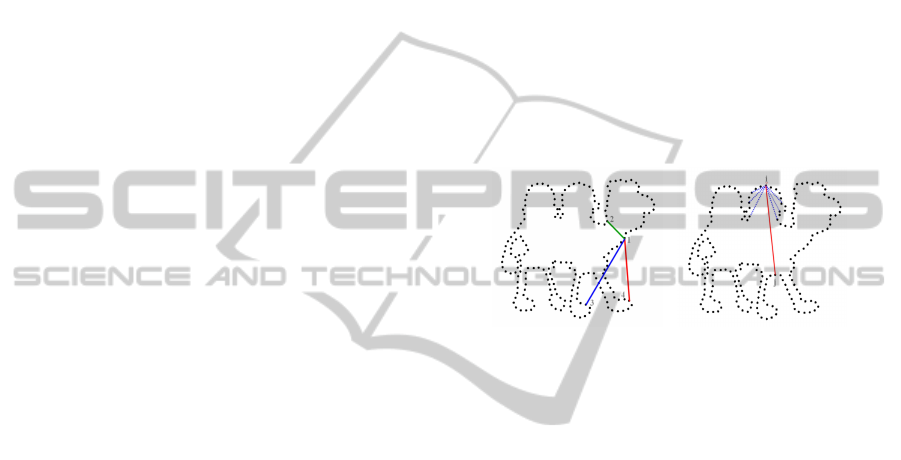
(a) (b)
Figure 2: According to Visibility Rules, nodes 1,2 are vis-
ible, while nodes 1,3 and 1,4 are not visible (a). Despite
nodes i, j are visible they do not contribute to shape decom-
position as the nodes that are linked by the dotted lines (b).
Despite naturalness in the shape representation
that is introduced by the visible node pairs, there
still exist edges that do not help in distinguishing the
shape’s parts, as we can see in Figure 2(b) where the
nodes i, j form a visible pair according to the above
mentioned Visibility Rules. However, we are inter-
ested in revealing the meaningful parts of the shape,
which means that nodes i, j do not contribute to that
way as they link nodes from different shape parts. Al-
though nodes i, j can “see” each other, they are not
close neighbor points (starting from the i boundary
point and moving clock-wise). These connections
manifest themselves in Figure 3(a) as the non-zero
values that lay away from the main diagonal thus
making the solution of the shape partitioning prob-
lem complicated. On the other hand, in Figure 2(b),
nodes that are linked with i showed on dotted edges,
are found in the same neighborhood with it and form
the camel’s hump. Therefore, G
V
must be redefined
by posing nodes’ neighborhood restriction. Specifi-
cally, two boundary points are defined as not visible
and their corresponding edge is set to zero, if they are
placed far from each other. Notice that distance is not
measured according to the edge length but is calcu-
lated as the number of intermediate points when mov-
AVisibilityGraphbasedShapeDecompositionTechnique
517

ing along the contour. Another interesting approach
could use edge length information, but is not studied
in this paper.
Let us concentrate ourselves on the definition of
the conditioned visibility graph. To this end, let us
define the neighborhood of radius n of the i-th node
of set V defined in Equ. (2) as the following set of
indices:
N
i
n
= {< i+ j >
N
, j = 0, ±1, ±2, . . . ± n} (4)
where < . >
N
denotes the modulo N operation, that
is:
0 ≤ < k >
N
= k − mN ≤ N − 1, m ∈ Z. (5)
As it can be easily verified, the range of valid values
of radius n belongs to the set R
I
=
1, 2, ··· , ⌈
N
2
⌉
,
where ⌈x⌉ denotes the ceil of x. Finally, we must
stress at this point that the use of the modulo operator
is essential for the correct definition of the neighbor-
hood of a node, because the shape contours are closed
curves.
Having defined the radius-n neighborhood of a
node of G
V
, the elements of the conditioned weighted
matrix W
n
can be defined as follows:
w
n
ij
=
w
ij
, if j ∈ N
i
n
0, otherwise.
(6)
Note that the conditioned weighted matrix defined
above can easily be formed from the element-wise
multiplication of the original weighted matrix W and
the following symmetric band Toeplitz matrix:
T
n
= toeplitz([1
n+1
0
N−(2n+1)
1
n
]) (7)
where 1
k
, 0
k
are vectors of length k containingall ones
and zeros, respectively. Note finally that the l
0
“norm”
of each row of the above formed matrix W
n
is at most
2n+ 1.
Conditioned visibility graphs resulting from the
original visibility graph of the camel shape, depicted
in Figure 3(a), are shown in Figure 3(b)-3(d) for three
(3) different values of radius n. As it is clear from this
figure, the constraint imposed through the radius of
the neighborhood of each boundary point to the field
of view of the hypothetical observer, influences the
size, as well as, the specific form of the shape compo-
nents that emerge at a great degree. More specifically,
if the admissible number of neighboring nodes that
can be visible is small, then more yet smaller groups
of the boundary nodes have the tendency to be formed
(see Figure 3). On the other hand, imposing a loose
constraint to G
V
, groups have the tendency to expand,
leading, in most cases, to undesirable results. Note
also from Figure 3(a) that total absence of such a visi-
bility constraint results to a G
V
with non distinct com-
ponents, while edges that link nodes of physically dif-
ferent groups are present.
50 100 150 200
50
100
150
200
(a)
50 100 150 200
50
100
150
200
(b)
50 100 150 200
50
100
150
200
(c)
50 100 150 200
50
100
150
200
(d)
Figure 3: Initial G
V
(a) and n-conditioned G
V
for different
values of n: 40 (b), 30 (c) and 10 (d).
We are expecting that different values of neigh-
borhood radius, result in different decompositions of
the candidate shape. Indeed, as a rule, the greater the
radius of the neighborhood is, the larger the size of
the shape’s components are. This phenomenon, is ev-
ident in Figure 4, where the results obtained from the
application of the proposed decomposition algorithm
(presented in the next subsection) in the conditioned
visibility graphs depicted in Figure 3(b)-3(d) corre-
sponding to different values of n, are shown.
(a) n = 10 (b) n = 30 (c) n = 40
Figure 4: Different decompositions of the camel shape cor-
responding to different values of neighborhood radius n (see
text).
It is obvious that for small values of n small shape
components are constructed, but as n increases the
small components seem to merge and larger groups
are formed. As it becomes clear, we must somehow
estimate the desired radius of neighborhood of the
graph.
Moreover, although in the n-conditioned G
V
sev-
eral groups of boundary points seem to be formed
more clearly, as it is evident in Figure 3, a strict lim-
itation seems to be imposed by the Visibility Rules
V R
i
, i = 1, 2. Indeed, very often in the n-conditioned
G
V
values of boundary points are set to zero, since
according to this rule they are not visible. However,
in many cases, the majority of these nodes belong to
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
518
the same part of the shape. Such a case is shown,
as an example, in Figure 5 where, as it is apparent,
all nodes i, j, k and m are members of the “camel’s
head” part. Nevertheless, the boundary points i, j
cannot ”see” each other, due to the intersection exist-
ing between their corresponding edge and the shape’s
contour, which means that the i- j link gains no con-
necting value. Application of such a strict rule leaves
out many important points from each shape compo-
nent (i.e. nodes i, j in Figure 5), thus leading into
a n-conditioned G
V
where groups are not clearly sep-
arated and in general its form is far away from the
idealization presented in Section 1.
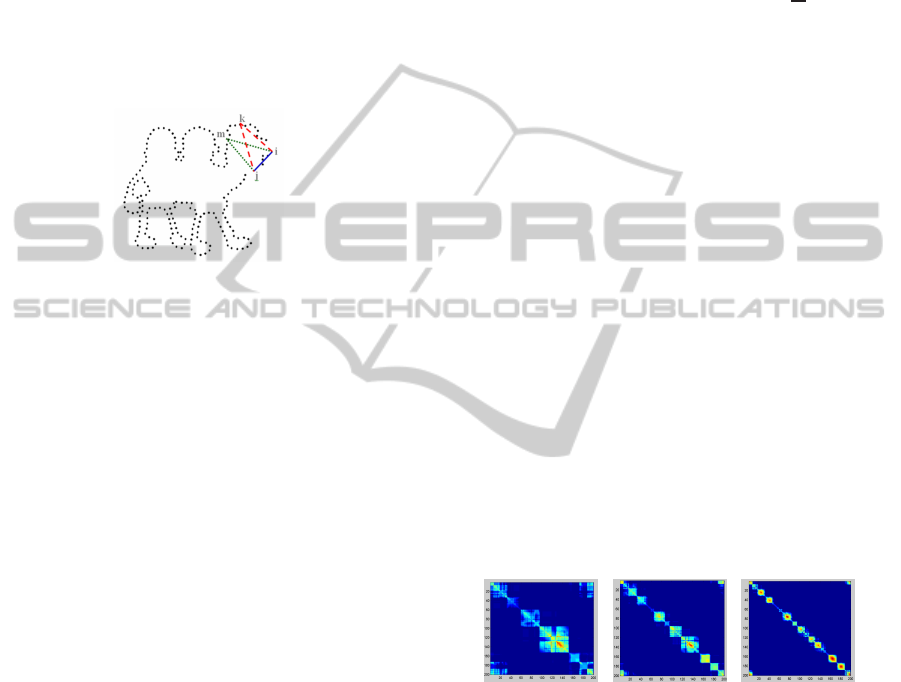
Figure 5: Despite violation of the rule V R
2
, nodes i, j are
gaining connection votes as they are both visible from nodes
k and m.
In an attempt to overcome this problem and define the
shape’s meaningful parts, as we are going to see in
the next section, we assign to each node a number that
indicates connection votes. A connection vote is as-
signed to a link each time the corresponding nodes
are both visible from another node. In Figure 5,
nodes i, j both form visible pairs with nodes k and
m, and thus two (2) votes are added to the edge ε
ij
.
In that way, visibility is extended and many edges are
obtaining“visibility votes” even if they are not visi-
ble. This “indirect” visibility facilitates the connec-
tion of nodes that belong to the same group, even
though they do not all share direct links. The num-
ber of votes that an edge accumulates is analogous
to the number of nodes from which the edge’s end-
ing nodes are mutually visible. This alternative way
to define similarity between the node-pairs is similar,
but does not coincide, to the “Shared Nearest Neigh-
bors” algorithm, which was first introduced by (Jarvis
and Patrick, 1973). According to this principle the
similarity of the connected nodes i, j which are both
connected to a set of nodes A, is augmented as their
closeness is “confirmed” by nodes of set A.
Having identified the critical problems that drasti-
cally affect the quality of the solution of the problem
at hand, we are going to investigate them in detail in
the next subsection.
3.2 Neighborhood Radius Estimation
As mentioned the impact of the size of the neighbor-
hood, to the quality of the obtained shape decomposi-
tion, in terms of the visual meaningfulness of its com-
ponents, is essential. Thus its determination, even in
a non optimal way, is considered necessary. To this
end, let us consider that the idealization W
n
⋆
intro-
duced in Section 1, of the visibility matrix is given,
and let us form the following sequence of numbers:
c[n] =
N
∑
i=1
∑
j∈N
i
n
v
n
ij
, n = 1, 2, ·· · , ⌈
N
2
⌉ (8)
where v
n
ij
denotes the (i, j) element of the following
“Voting” matrix:
V
n
= W
n
(W
n
)
T
= (W
n
)
2
. (9)
Note that by taking into account the special “1 − 0”
form of the components of its basic ingredient, that is
the elements of matrix W
n
, the content of the (i, j)-th
element of the above defined voting matrix, expresses
the connectivity strength of the nodes i and j in the
shape contour. The voting matrices of the correspond-
ing n-conditioned G
V
shown in Figures 3(b), 3(c) and
3(d), are depicted in Figure 6, for neighborhood ra-
dius n=40, 30 and 10, respectively. Note that their
form is closer to the idealization introduced in Sec-
tion 1. This contitutes the basic reason we propose its
use as a vehicle to fulfill our ultimate goal, as we are
going to see in the next subsection. We have to say
more things about this voting matrix, but for the mo-
ment let us concentrate ourselves on the “Mean Vot-
ing” sequence defined in Equ. (8), and in particular
on a very interesting property that it has and we are
going to exploit in order to estimate the desired value
n
⋆
.
(a) (b) (c)
Figure 6: Examples of Voting Matrices corresponding to
different values of neiborhood radius n (see text).
More precisely, using the definition of sets N
i
n
,
we can easily see that the cardinalities of any pair of
the aforementioned sets satisfy the following ordering
relations:
|N
i
n+k
| ≥ |N
i
n
|, ∀ k ≥ 0 (10)
and consequently, as it can easily be proven, c[n] is an
increasing sequence of the neighborhood radius, that
is:
c[n+ k] ≥ c[n], ∀ k ≥ 0. (11)
In addition, there is a radius after that the values of
the sequence should not be changed even more. As it
is clear, that value is the desired n
⋆
.
AVisibilityGraphbasedShapeDecompositionTechnique
519
Thus, considering W
n
⋆
known, by computing the
sequence c[n], n = 1, 2, ··· , ⌈
N
2
⌉ from Equ. (8) and
by exploiting the above mentioned properties, the true
value of the neighborhood radius can be obtained
from the solution of the following optimization prob-
lem:
n
⋆
= arg max
n∈ R
I
c[n]
2n+ 1
. (12)
However, the ideal matrix W
n
⋆
is unknown and the
computation of the sequence defined in Equ. (8) is
practically impossible. Instead, the use of the ac-
tual n-conditioned visibility matrices is proposed for
its evaluation and then an estimation of the desired
neighborhood radius ˆn
⋆
can be achieved by solving
the corresponding optimization problem. An example
of the above mentioned sequences resulting from the
solution of the above mentioned optimization prob-
lems to the “octapus” shape is shown in Figure 7. We
must stress at this point that even though the exact
and the approximated sequences are totally different,
the values of the corresponding neighborhoodradii, in
most cases, are close to each other. Furthermore, the
impacts of “dark areas” along the main diagonal as
well as the off diagonal “bright areas” appeared in the
sequence of the actual matrices are clearly depicted
on the form of “Mean Voting Actual” sequence shown
in Figure 7(d).
(a)
20 40 60 80 100 120 140 160 180 200
20
40
60
80
100
120
140
160
180
200
(b)
20 40 60 80 100 120 140 160 180 200
20
40
60
80
100
120
140
160
180
200
(c)
0 10 20 30 40 50 60 70 80 90 100
0
500
1000
1500
2000
2500
3000
Neighborhood Radius n
Mean Voting Sequences
Ideal
Actual
(d)
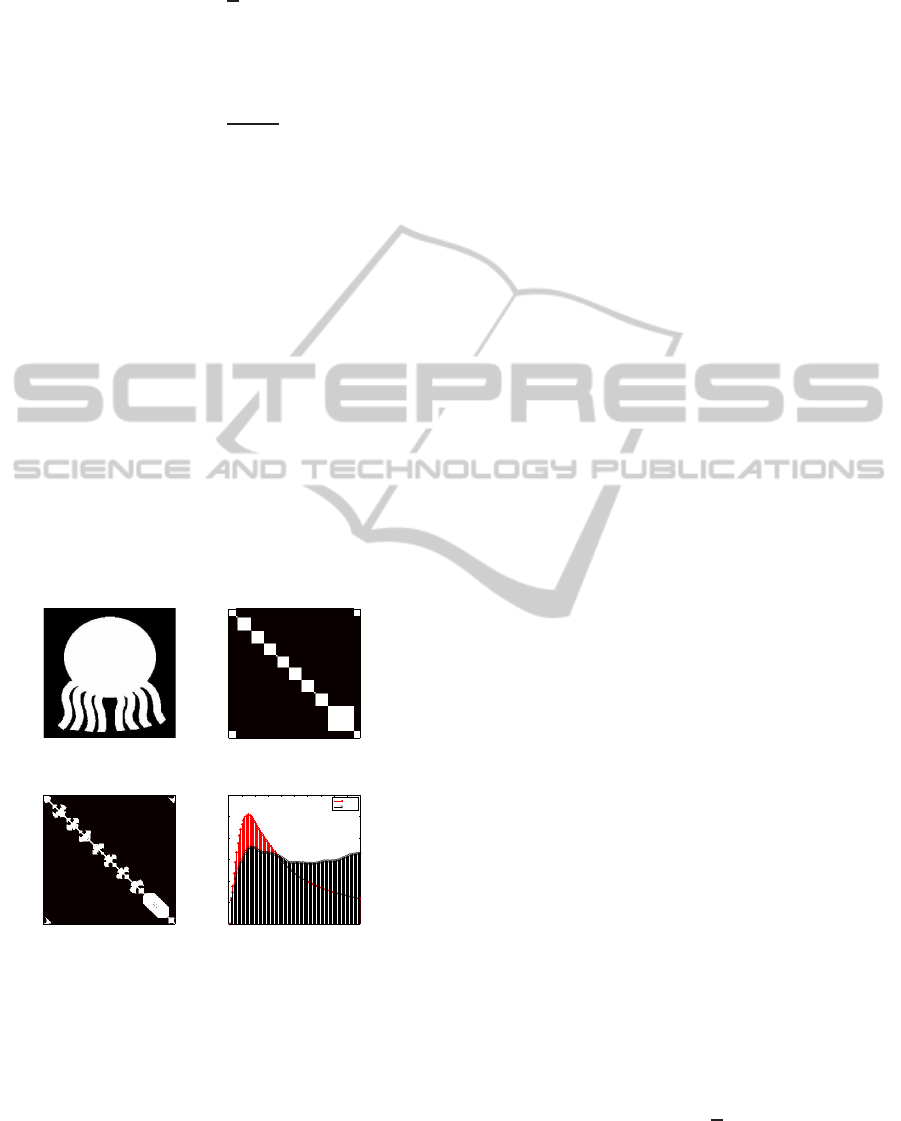
Figure 7: The octapus shape contained in MPEG7 CE-
shape1 part B (a), its ideal block diagonal matrix (b), the
actual ˆn
⋆
-conditioned G
V
(c) and the corresponding “Mean
Voting” sequences (d).
Having estimated the neighborhood radius ˆn
⋆
for
a candidate shape, let us go back to “Voting” matrix
V
n
defined in Equ. (9) and see how we can use it to
solve the second critical problem mentionedin the last
paragraph of the previous subsection.
3.3 The Iterative Algorithm
What remains in order to complete the presentation
of the proposed technique is the development of an
algorithm for the solution of the inverse problem, that
is, given the actual conditioned visibility matrix W
ˆ
n
⋆
form a block diagonal matrix with each block repre-
senting a meaningful part of the shape contour. To
this end, we propose a two step iterative algorithm
with its first step being a normalization-step of the
“Voting” matrix V
n
defined in Equ. (9) and the sec-
ond one a thresholding-step. Let us now concentrate
on the above mentioned matrix and see how we can
use it in order to achieve our goal. As it is clear from
its definition in Equ. (9), the (i, j) element of the ma-
trix can be expressed by the inner product of the i-th
and j-th rows of the matrix W
ˆ
n
⋆
, that is:
v
ˆ
n
⋆
ij
=< w
ˆ
n
⋆
i
, w
ˆ
n
⋆
j
> . (13)
Using the definition of the inner product, Equ. (13)
can be rewritten as follows:
v
ˆ
n
⋆
ij
= ||w
ˆ
n
⋆
i
||
2
||w
ˆ
n
⋆
j
||
2
cos(θ
ij
) (14)
where ||x||
2
denotes the l
2
norm of visibility vector x,
and θ
ij
the existing angle between the two mentioned
visibility vectors.
We can now define the following normalized ver-
sion of the above mentioned matrix
¯v
ˆ
n
⋆
ij
= cos(θ
ij
) (15)
with the value of each element, quantifying the exist-
ing similarity or correlation of the visibility vectors
corresponding to nodes i and j of the
ˆ
n
⋆
-conditioned
visibility graph.
Note now that after the normalization step, matrix
¯
V
ˆ
n
⋆
takes values in the interval [0 1], and thus our
goal now is to update the W
ˆ
n
⋆
by using a predefined
threshold t:
W
ˆ
n
⋆
=
¯
V
ˆ
n
⋆
≥ t (16)
and use it as the new approximation of the ideal visi-
bility matrix in the next iteration.
The above described steps are repeated in an itera-
tive fashion until the convergence to a block diagonal
matrix be achieved.
An outline of the proposed algorithm follows.
procedure SHAPE DECOMPOSITION(V , t)
Using V R
i
, i = 1, 2, form matrix W
Form c[n], n = 1, 2, · ·· , ⌈
N
2
⌉ of Equ. (8).
Solve Problem defined in (12) to find ˆn
⋆
.
Form W
ˆn
⋆
using W and T
ˆn
⋆
of Equ. (7).
repeat
Form the Normalized Voting matrix
ˆ
V
ˆn
⋆
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
520
using Equ. (15).
Use Equ. (16) to update matrix W
ˆn
⋆
.
until convergency
end procedure
Having completed the presentation of the pro-
posed technique, in the next section we are going
to apply it on several shapes and compare its perfor-
mance against well knownin the literature techniques.
4 EXPERIMENTAL RESULTS
In this section we are going to present comparative
results obtained from the application of the proposed
technique on several shapes of the MPEG7 CE-shape-
1 part B database (Latecki et al., 2000). All shape
contours we used in our experiments, were sampled
at N=200 points. In addition, in all experiments we
have conducted, the value of threshold t was set to
0.5.
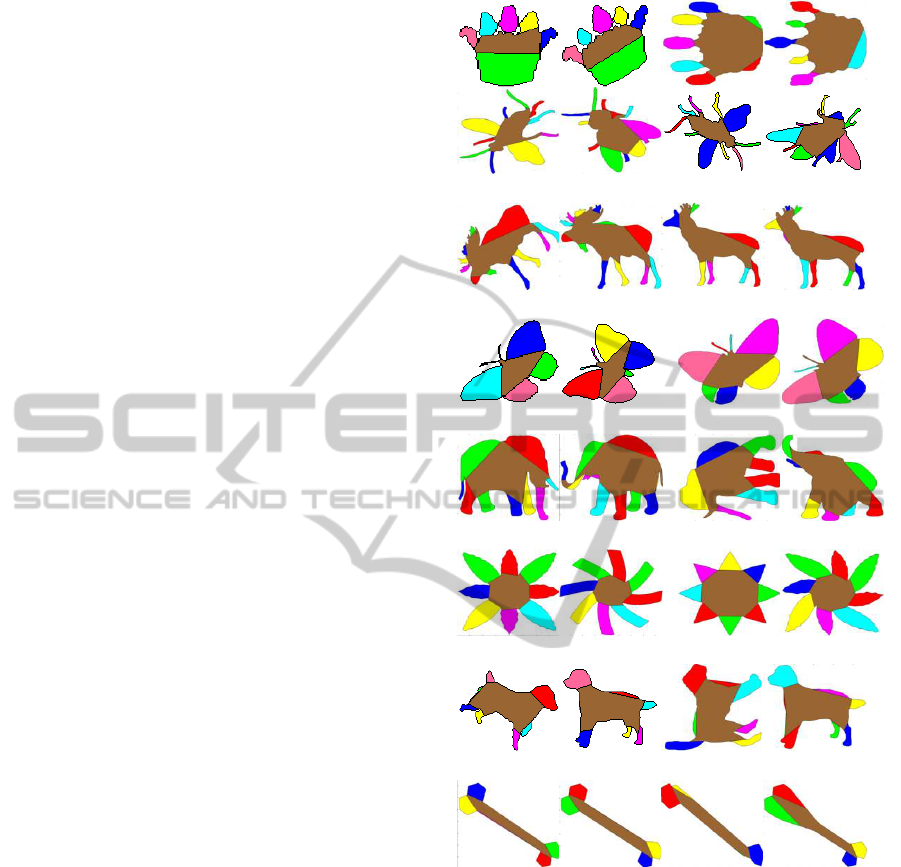
A sample of 2D decomposed shapes are shown in
Figure 8. It is evident that for some shapes the re-
sulting decomposition is meaningful, while in some
situations, parts that obviously could not be sepa-
rated by a human being, are splitted by the algorithm.
Specifically, the crown shapes are decomposed into
seven (7) or eight (8) parts, while one could expect
a six-part result. Continuing, in the fly shapes legs,
wings and antennas are successfully recognized by
our method. The same comment holds for the but-
terflies shown in the fourth row of the figure. More-
over, in shapes such as the deer, the elephants and
the dogs, the introduced method achieves partition-
ing into meaningful components (i.e. legs, head, tails
etc). However, in some cases the start and the end
boundary points of a component should be defined
more explicitly, so as to better demostrate the mean-
ingful component that is captured. Finally, shapes
such as the bone or the margaret-like ones, are well
partiotioned. Regarding the non-rigid parts of shapes
(i.e. legs, tails, proboscis, antennas etc) we can ob-
serve that the VSD method provides satisfactory re-
sults, as it achieves to recognize almost all meaning-
ful articulated shape parts, even if they are depicted in
different poses. Despite the fact that non-rigid defor-
mations affect the visibility graph (different edges are
revealed, while others may dissapear), the key idea of
connection votes, seems to give the ability to handle
non-rigid shape variations, in an effective way.
To further demonstrate the effectiveness of the
proposed technique, a small sample of the results we
obtained from the application of our technique as well
as the ACD (Lien and Amato, 2004), the CSD (Liu
Figure 8: A sample of decomposed shapes of the MPEG7
database.
et al., 2010) and the MNCD (Ren et al., 2011) meth-
ods on shapes contained in the MPEG7 CE-shape-1
part B database, are shown in Figure 9. As we can
see from this figure, the proposed method performs
well in cases of non-rigid parts. Indeed, the beetle’s
legs as well as the horse’s legs are not decomposed
into multiple parts, an indication that the results of the
proposed technique are close to perceptually mean-
ingful decompositions. On the other hand, methods
that use concavity rules fail to capture such parts as
a whole, because of their large concavity. Having
no intention to discredit the performance of the other
techniques, the VSD fails to recognize the head of the
AVisibilityGraphbasedShapeDecompositionTechnique
521
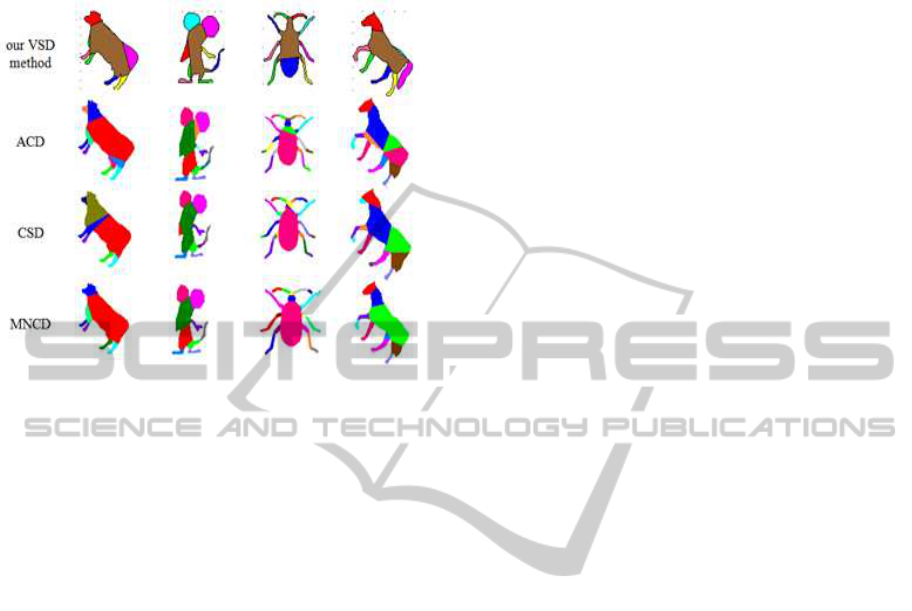
mouse shape as a whole part due to the constraint that
is imposed to the Visibility Graph by the estimated
value ˆn
⋆
of radius.
Figure 9: A small sample of decomposition results obtained
from the application of our method and ACD, CSD and
MNCD methods in shapes contained in MPEG7 database.
5 CONCLUSIONS
In this paper, a novel method for shape decomposi-
tion is presented, which stems from the idea of vis-
ibility between boundary points. The shape is seg-
mented into its meaningful parts by a two-step al-
gorithm which efficiently organizes shape’s boundary
points into separate blocks. The proposed method is
applied in a large number of 2D shapes. The intro-
duced technique seems to result in perceptualy more
meaningful decompositions of the non-rigid parts of
the shapes, than most of the existing methods. In ad-
dition, the proposed technique results in decomposi-
tions that nearly captures the whole structure of the
original shape. The extension of the proposed tech-
nique in 3D shapes and the development of new ro-
bust algorithms to efficiently convergeto the ideal low
rank shape matrix are currently under investigation.
REFERENCES
Biederman, I. et al. (1987). Recognition-by-components: A
theory of human image understanding. Psychological
review, 94(2):115–147.
De Berg, M., Van Kreveld, M., Overmars, M., and
Schwarzkopf, O. (1997). Computational geometry:
algorithms and applications. Springer.
De Goes, F., Goldenstein, S., and Velho, L. (2008). A hier-
archical segmentation of articulated bodies. In Com-
puter graphics forum, volume 27, pages 1349–1356.
Wiley Online Library.
Jarvis, R. and Patrick, E. (1973). Clustering using a similar-
ity measure based on shared nearest neighbors. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 22(11).
Juengling, R. and Mitchell, M. (2007). Combinatorial shape
decomposition. In Advances in Visual Computing,
pages 183–192. Springer.
Latecki, L. J. and Lak¨amper, R. (1999). Convexity rule for
shape decomposition based on discrete contour evo-
lution. Computer Vision and Image Understanding,
73(3):441–454.
Latecki, L. J., Lakamper, R., and Eckhardt, T. (2000). Shape
descriptors for non-rigid shapes with a single closed
contour. In Computer Vision and Pattern Recognition,
2000. Proceedings. IEEE Conference on, volume 1,
pages 424–429. IEEE.
Lien, J.-M. and Amato, N. M. (2004). Approximate convex
decomposition of polygons. pages 17–26.
Liu, H., Liu, W., and Latecki, L. J. (2010). Convex
shape decomposition. In Computer Vision and Pat-
tern Recognition (CVPR), 2010 IEEE Conference on,
pages 97–104. IEEE.
Liu, Y.-S., Ramani, K., and Liu, M. (2011). Computing
the inner distances of volumetric models for articu-
lated shape description with a visibility graph. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 33(12):2538–2544.
Mi, X. and DeCarlo, D. (2007). Separating parts from 2d
shapes using relatability. In Computer Vision, 2007.
ICCV 2007. IEEE 11th International Conference on,
pages 1–8. IEEE.
Ren, Z., Yuan, J., Li, C., and Liu, W. (2011). Minimum
near-convex decomposition for robust shape represen-
tation. In Computer Vision (ICCV), 2011 IEEE Inter-
national Conference on, pages 303–310. IEEE.
Shapiro, L. G. and Haralick, R. M. (1979). Decomposition
of two-dimensional shapes by graph-theoretic cluster-
ing. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, (1):10–20.
Siddiqi, K. and Kimia, B. B. (1995). Parts of visual form:
Computational aspects. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 17(3):239–251.
Singh, M., Seyranian, G., and D.Hoffman (1999a). Parsing
silhouettes: The short-cut rule. Perception and Psy-
chophysics, 61(4):636–660.
Singh, M., Seyranian, G. D., and Hoffman, D. D. (1999b).
Parsing silhouettes: The short-cut rule. Perception &
Psychophysics, 61(4):636–660.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
522
