
Enhanced Hierarchical Conditional Random Field Model for
Semantic Image Segmentation
Li-Li Wang, Shan-Shan Zhu and Nelson H. C. Yung
Laboratory for Intelligent Transportation Systems Research, Department of Electrical and Electronic Engineering,
The University of Hong Kong, Pokfulam Road, Hong Kong, SAR, China
Keywords: Conditional Random Field, Semantic Segmentation, Image Segmentation, Pairwise Potential, Higher Order
Potential.
Abstract: Pairwise and higher order potentials in the Hierarchical Conditional Random Field (HCRF) model play a
vital role in smoothing region boundary and extracting actual object contour in the labeling space. However,
pairwise potential evaluated by color information has the tendency to over-smooth small regions which are
similar to their neighbors in the color space; and the higher order potential associated with multiple
segments is prone to produce incorrect guidance to inference, especially for objects having similar features
to the background. To overcome these problems, this paper proposes two enhanced potentials in the HCRF
model that is capable to abate the over smoothness by propagating the believed labeling from the unary
potential and to perform coherent inference by ensuring reliable segment consistency. Experimental results
on the MSRC-21 data set demonstrate that the enhanced HCRF model achieves pleasant visual results, as
well as significant improvement in terms of both global accuracy of 87.52% and average accuracy of
80.18%, which outperforms other algorithms reported in the literature so far.
1 INTRODUCTION
Semantic image segmentation can essentially be
formulated as a labeling problem that attempts to
assign a class label from a predefined label set to
each pixel or super pixel in a given image (Boix et
al., 2012); (Kohli and Torr, 2009); (Ladicky et al.,
2009). Over the years, many assignment approaches
have been explored with varying degree of success.
One of the popular ideas is perhaps the use of
Conditional Random Field (CRF) (Lafferty et al.,
2001) combined with various potentials. The CRF is
a discriminative model (Kumar and Hebert, 2006)
that focuses on searching the optimal hyperplane for
different classes. The labeling problem is thus
solved by minimizing an energy function defined in
the conditional random field over pixels or patches
in the image (He et al., 2004); (Kohli and Torr,
2009); (Kumar and Hebert, 2005); (Ladicky et al.,
2009); (Shotton et al., 2006), which can be quite
effective in semantic image segmentation. For
instance, one simple CRF model was described in
(Boykov and Jolly, 2001) for object and background
segmentation. In this model, only two potentials,
unary potential and pairwise potential, are defined in
the energy function. It achieved good performance
for a two-class segmentation on grey images.
However, this model treats all the random variables
on the same layer, which does not capture high level
contextual information. Plath et al., (2009) added a
global node over the basic layer for multi-class
image segmentation. A consistency potential is then
defined as a Potts model to penalize each local node
which is different from the global one. As a result, it
enforces all the local nodes in a region are assigned
the same labels as the global node. This might not be
capable to interpret large regions including multiple
classes. Given these problems of the simple CRF
model, complex CRF models, such as the
hierarchical CRF (HCRF) models as described in
(He et al., 2004); (Kohli and Torr, 2009); (Kumar
and Hebert, 2005); (Ladicky et al., 2009), are then
being proposed. The HCRF models fuse different
scales of contextual information together to jointly
perform labeling inference. The most representative
of all the HCRF models is probably the one outlined
in (Ladicky et al., 2009). Mathematically, the HCRF
model is characterized by an energy function defined
over the unary, pairwise, higher order and co-
occurrence potentials. The first three potentials
consider local interactions. Specifically, the unary
potential is given by the observation of each pixel
215
Wang L., Zhu S. and Yung N..
Enhanced Hierarchical Conditional Random Field Model for Semantic Image Segmentation.
DOI: 10.5220/0004649202150222
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 215-222
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

from low level cues. The pairwise potential
expresses the dependencies of neighboring pairwise
pixels based on the difference in colors. The higher
order potential encodes the interaction of long range
pixels in super pixels or segments, while
relationships between objects are captured by the co-
occurrence potential based on global statistics. Note
that the pairwise potential used in (Ladicky et al.,
2009) is evaluated only on the basis of color
differences to enforce a smooth labeling, it is not
always a rational decision. For example, if the
neighboring pixels have similar color features but
belong to different objects, the pairwise potential
could result in over smoothness. Another problem
arises from higher order potential. Note that the
higher order potential is guided by segments. While
segmentation methods (Comaniciu and Meer, 2002);
(Felzenszwalb and Huttenlocher, 2004);
(MacQueen, 1967); (Shi and Malik, 2000); (Tan and
Yung, 2008); (Zhu and Yung, 2011) are plentiful,
different qualities of segments from being over-
segmented to under-segmented are obtained. If a
fine segment is used, better inference results are
usually produced. In contrast, if a coarse segment is
used, inappropriate guidance would result in mis-
classifications.
To solve the above issues in the HCRF model
(Ladicky et al., 2009), one contribution of this paper
is to develop an enhanced model for pairwise
potential. Considering the pairwise model itself may
not incorporate enough information for an efficient
inference, the newly constructed model depends not
only on the contrast in the color space but also on
the differences in the Laplacian space for an efficient
inference. The believed labeling from unary
potential is propagated to reduce the side effect of
the pairwise model. Another contribution is to
establish a discriminative model for the higher order
potential. The discriminative model has the
capability to select fine segments that involve in the
inference process. Therefore, the higher order
potential can also be called a segment-reliable
consistency potential. Consequently, coherent
classification results are obtained. Experimental
results show that the enhanced HCRF model
achieves significant improvement in terms of both
global accuracy and average accuracy, as compared
to other models in the literature.
In Section 2, we review the HCRF based method
and its shortcoming for semantic image
segmentation. In Section 3, we describe the details
of the proposed method. Experimental results are
given in Section 4, and the paper is concluded in
Section 5.
2 CONDITIONAL RANDOM
FIELD BASED METHOD FOR
SEMANTIC IMAGE
SEGMENTATION
2.1 Conditional Random Field for
Semantic Image Segmentation
The aim of the CRF approach is to minimize an
energy function E(x) defined on a discrete random
field X. Each random variable
∈corresponds to
a node in the graphical model. The indexes of all
basic nodes consist of a set of
1,2, … ,
. The
value x
i
of each random variable X
i
(or each node)
represents the class label which takes a value from
the label set
,
,…,
. Thus the labeling
problem is to find a label for each node in the
graphical model from the label set.
The energy function in the HCRF model is
defined on unary, pairwise, higher order and co-
occurrence potentials (Ladicky et al., 2009) as
i
h
ii ijij c c
ii,j cS
E(x) x x ,x x C L
(1)
where V corresponds to the set of all pixels in an
image, N
i
is the set of neighboring pixels of pixel i.
S is a set of cliques (super pixels or segments).
In Equation (1), the unary potential ϕ
i
(x
i
) is
defined on a pixel i. It can be calculated as the
negative log of the likelihood that pixel i is labeled
as x
i
. The likelihood can be obtained from the output
of an adaptive boosted classifier (Ladicky et al.,
2009; Torralba, Murphy, & Freeman, 2004) based on
low level features (such as texton (Shotton et al.,
2006), scale invariant feature transform (SIFT),
color SIFT and local binary pattern (LBP)) of each
pixel in an image.
The pairwise potential Ѱ
ij
(x
i
, x
j
) encodes a
smoothness prior between the neighboring random
variables X
i
and X
j
. In (Ladicky et al., 2009), this
potential is typically calculated as
i
ij
ji
jiij
j
dw
IIW
wwxx
,
*
exp,
2
2
10
,
(2)
where w
0
, w
1
and w
2
are model parameters whose
values are learned based on the training data. The
parameter d
ij
denotes the distance between pixel i
and pixel j. I
i
is the color vector of pixel i, and W is
the weight vector corresponding to three color
components.
In Equation (1),
c
h
c
x
denotes the higher order
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
216

potential defined over a set of pixels (super
pixel/segment) which is often generated from one of
many unsupervised image segmentation methods. It
is adopted to capture long range pixel interactions
(region continuity), that is powerful in interpreting
middle level structural dependencies between pixels
in regions. C(L) denotes the co-occurrence potential
based on high level statistics for encoding the
relationships between objects.
To perform inference, graph cuts-based method
(Boykov et al., 2001); (Boykov and Jolly, 2001);
(Kohli and Torr, 2009); (Ladicky et al., 2009);
(Ladický et al., 2012); (Szummer et al., 2008) is
used in the HCRF model to minimize the energy
function in Equation (1).
2.2 Problems with Pairwise and Higher
Order Potentials for Semantic
Segmentation
In essence, the pairwise potential encodes a
smoothness prior over neighboring variables. It
penalizes two neighboring pixels which are labeled
as different classes. In such a way, it is capable of
smoothing the boundary of regions achieved by
inferring unary potentials in the label space.
However, it also results in an undesirable side effect.
As depicted in Fig. 1, the boat is smoothed out when
pairwise potential is added. One reason is that the
boat and the water have similar color. By evaluating
the pairwise potential in the color space, a larger
penalty to force neighboring variables to adopt the
same label is assigned by the graph cuts inference.
In such case, pairwise potential results in over-
smoothness of some regions.
In order to capture the fine contours of objects,
higher order potential defined over a set of segments
is incorporated into the HCRF model in Equation (1)
by Ladicky et al (Ladicky et al., 2009). In (Ladicky
et al., 2009), six layers of image segment are
extracted based on two methods. Three layers of
segment are generated by the K-Means clustering
method (MacQueen, 1967), and the other three
layers of segment are obtained by the Meanshift
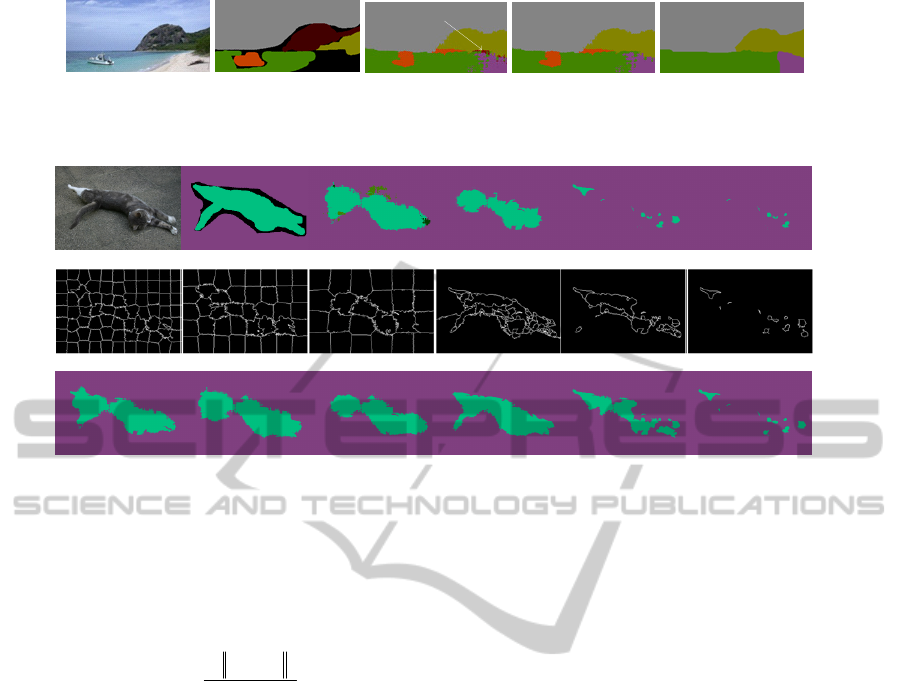
clustering method (Comaniciu and Meer, 2002). Fig.
2 (a2)-(f2) depicts the segmentation results using
different parameters. In this example, only three
potentials including unary potential, segment
consistency potential and co-occurrence potential are
considered instead of four potentials in Equation (1),
to eliminate possible side effects from pairwise
potential as discussed above. Generally speaking,
unsupervised segmentation methods can extract
more accurate contour of objects when the parameter
values of K-Means and Meanshift are increased.
Segment consistency potential has the capability to
integrate the same object under the guidance of
unsupervised segmentations. From the inference
point of view, it helps the labeling process recover
from false unary predictions. However, if
unsupervised segments are too coarse, such as the
results for the cat scene as shown in Fig. 2 (e2) and
(f2), the inferred boundaries are not reliable under
the guidance of inaccurate segments. As a result, it
results in false labeling, such as the labeling results
in Fig. 2 (e1), (f1), (e3) and (f3).
3 ENHANCED PAIRWISE AND
HIGHER ORDER POTENTIALS
FOR SEMANTIC IMAGE
LABELING
3.1 Enhanced Pairwise Potential
Note that the pairwise potential in Equation (2) is
evaluated solely based on the color space. From
Equation (2), we can see that a larger penalty is
given if two pixels have similar color. As a result,
neighboring pixels tend to have the same labeling
under the pairwise smoothing constraints, which it is
not always the best decision. It is evident there are
significant between-class overlaps in terms of color
only. Especially, when the size of the object is small,
the resolution of an image is low or the image is
blurred. In one of these scenarios, the pairwise
potential tends to result in over-smoothing as shown
in Fig. 1. In order to incorporate sufficient
information to express the relationship of
neighboring pixels, an extra term based on the edge
space is added to calculate the smoothing
constraints. As such, a second order derivative
operator, the Laplacian operator, may be used to
convolve with an image. It can extract detailed edge
information of an image and is isotropic. In
considering these advantages, we formulate an
enhanced pairwise potential evaluation method,
which is defined in both the color space and
Laplacian space as given in Equation (3).
otherwiseGGKIIKww
xNjxxif
xx
jiji
i
unary
ij
ji
e
ij
,
,,,0
,
2110
(3)
where
ij
ji
ji
d
IIW
IIK
*
exp
1
2
1
,
(4)
EnhancedHierarchicalConditionalRandomFieldModelforSemanticImageSegmentation
217
boat
building
tree
sky
water
sky
tree
road
boat
building
water
sky
tree
road
boat
water
sky
tree
road
water
(a) (b) (c) (d) (e)
Figure 1: Impact of the pairwise potential: (a) Original image, (b) Groundtruth, (c) unary potential, (d) unary and co-
occurrence potentials, (e) unary, pairwise and co-occurrence potentials.
(a1) (b1) (c1) (d1) (e1) (f1)
(a2) (b2) (c2) (d2) (e2) (f2)
(a3) (b3) (c3) (d3) (e3) (f3)
Figure 2: Unsupervised segmentation results and their semantic labeling results. (a1) Original image, (b1) Groundtruth, (c1)
labeling result on unary potential, (d1) labeling result using three-layer K-Means segments, (e1) labeling result using three-
layer Meanshift segments, (f1) labeling result using all six-layer segments; (a2)-(f2) Unsupervised segmentation results on
(a2) K-Means(30), (b2) K-Means(40), (c2) K-Means(50), (d2) Meanshift(7.0x6.5), (e2) Meanshift(7.0x9.5), (f2)
Meanshift(7.0x14.5); (a3)-(f3) Labeling results on (1) by using one-layer segments from (a2) to (f2), respectively.
and
ij
ji
ji
d
GGW
GGK
*
exp
2
2
2
(5)
In Equation (3), N(x
i
) denotes the indices of the set
of pixel i (corresponding to the random variable X
i
in the graphical model) and its neighboring eight
pixels, and
unary
i
x
denotes the labeling of pixel i
determined by the unary potential. If the random
variable associated with its surrounding eight
neighbors have the same labeling based on the
minimization of unary potential function, the class
label of this random variable is believed and
propagated even if the pairwise potential is included
in the energy function. In other words, the pairwise
potential does not work when the class label of a
random variable is propagated. Based on this
criterion, the object classes with smaller sizes and
similar color information to its adjacent objects are
preserved. In Equation (3), K
1
(·) and K
2
(·) are two
kernels defined in the color space and Laplacian
space, respectively. They take forms as shown in
Equations (4) and (5). In Equation (5), G
i
is equal to
the convolution between an image and Laplacian
operator. w
0
, w
1
, β
0
and β
1
are model parameters,
whose values are learned based on the training
dataset. By doing this, the pairwise potential is
sensitive to contrast in both color and edge
magnitude. To some extent, it suppresses the side
effect of the original model.
3.2 Enhanced Higher Order Potential
Note that the higher order potential is defined over a
set of segments. In the higher order term of Equation
(1), the set S includes all segments from multiple-
layer segmentations of an image by using two
unsupervised segmentation algorithms. In (Kohli &
Torr, 2009; Ladicky et al., 2009), the higher order
potential takes the form of a robust P
n
Potts model
as
ci
i
l
ci
l
cc
Ll
c
h
c
lxkw
,minx
max
,
(6)
where
max
c
denotes the maximum cost of the
potential for segment c,
l
c
represents the potential
cost if the segment c takes a dominant label
Ll
.
l
ci
kw
is used for calculating an additional penalty to
each pixel in segment c without taking the label l.
From Equation (6), we can see that the higher order
potential encourages more pixels in segment c to
take the dominant label l. This may result in over-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
218

integrating some segments ((e3) and (f3) in Fig. 2)
including more than one class label in the under
segmentation situation (such as (e2) and (f2) in Fig.
2). To resolve this problem, we propose a segment-
reliable consistency potential taking the form of
]T[,minx
max
r
ci
i
l
ci
l
cc
Ll
c
r
c
Sclxkw
,
(7)
where T[·] is an indicator function, and S
r
denotes
the set of segments that provides more reliable
guidance to an efficient inference. The minimization
of the higher order potential can be solved by
transforming it into an equivalent pairwise potential
(Boros and Hammer, 2002); (Kohli et al., 2009);
(Kohli and Torr, 2009); (Ladicky et al., 2009);
(Rother et al., 2009). The critical problem is to
determine which segments are reliable. In this paper,
T[c] is defined by Equation (8). When T[c] is equal
to one, it means that the segment c is reliable, and
takes part in the inference process. Otherwise, the
segment is excluded from the set S in Equation (1).
In other words, the unreliable segments are not
included in the energy minimization. As a result, the
inference is not influenced by the unreliable
segments any more, but decided by the other three
potentials and the segment-reliable consistency
potential.
otherwise
cncIcif
c
cl
,0
x,1
]T[
,
(8)
where parameters α (0.4) and β (0.1) can be learned
from validation set. Consequently, the energy
function is formulated in (9) for the enhanced HCRF
model. The graph cuts algorithm proposed in
(Ladicky et al., 2009) is then used to perform
inference.
LCxxxxxE
SSc
c
r
c
ji
ji
e
ij
i
ii
ei
,
,)(
(9)
4 EXPERIMENTAL RESULTS
Both the enhanced pairwise and higher order
potentials have been tested on the MSRC-21 dataset
(Shotton et al., 2006). They are evaluated based on
the global and average-per-class recall criteria
defined in (Ladicky et al., 2009). The MSRC-21
dataset includes 591 images with the resolution of
320×213 or 162×320 pixels, and 21 object classes.
In our experiments, the dataset is typically
partitioned into three sets including 45% for
training, 45% for testing, and 10% for validation as
in (Ladicky et al., 2009); (Shotton et al., 2006). Each
image has six-layer segments. Parameters for these
six-layer unsupervised segmentations are set to the
same as in (Ladicky et al., 2009).
To have a better understanding of the
classification effects by adopting different potentials
for these 21 object classes, four groups of semantic
segmentation results have been generated and
depicted in Table 1 based on the source code
(automatic labeling environment, abbreviated to
ALE) of the method in (Ladicky et al., 2009). “M0
(1 P)” denotes the classification based on the unary
potential, which is also called the pixel-based
random field (RF) method in (Ladicky et al., 2009).
“M1 (2 Ps)” denotes the classification based on two
potentials (unary and co-occurrence potentials). “M2
(3 Ps)” denotes the classification based on unary,
pairwise and co-occurrence potentials. “M3 (4 Ps)”
denotes the classification based on all four
potentials. From the results in Table 1, it can be seen
that the unary potential based inference has provided
significant classification accuracy in both the overall
(up to 83.56%) and average (up to 76.72%)
categories. By fusing one more potential, further
improvement in both categories is observed. When
all four potentials are considered, roughly 3% and
1% increases as compared with the pixel-based RF
method are achieved for the overall and average
accuracy, respectively. This means that the HCRF
model with higher order potentials (segment
consistency potentials) is feasible by taking into
account the interactions between different levels,
and it is significantly superior to the one-layer CRF.
However, it should also be noted that, compared
with the pixel-based RF method, classification
accuracies of some object classes, such as cow, cat,
and boat, are substantially reduced when the
segment consistency potential is included.
In Table 1, the experimental results of our
proposed enhanced model are also presented. “iM2
(3 Ps)” denotes the classification based on three
potentials which are similar to “M2 (3Ps)” but with
the enhanced pairwise potential. “iM3 (4 Ps)”
denotes the classification based on Equation (9). By
substituting the pairwise potential in iM2 (3 Ps) with
the enhanced version, the average classification
accuracy are improved when compared with M2 (3
Ps). When both the enhanced pairwise and the
segment-reliable consistency potentials are included,
iM3 (4 Ps) achieves the best performance of
87.52% and 80.18% for global and average
classification, respectively, which is slightly less
than 1% of increase overall when compared with M3
(4 Ps), but close to 3% of increase in average
EnhancedHierarchicalConditionalRandomFieldModelforSemanticImageSegmentation
219
accuracy. As average accuracy is more
representative in how well the method classifies, this
percentage is clearly more significant. In terms of
individual classes, the proposed model (iM3 (4 Ps))
performs equal or better in 18 classes (indicated by
the bold font) when compared with M3 (4 Ps). When
compared with the pixel-based RF method, the
proposed model is superior in 17 classes. We also
tried other datasets, such as Corel, Sowerby,
Stanford used in (Ladicky et al., 2009), and the
proposed algorithm still show better results than
those in (Ladicky et al., 2009) in terms of both
measurements.
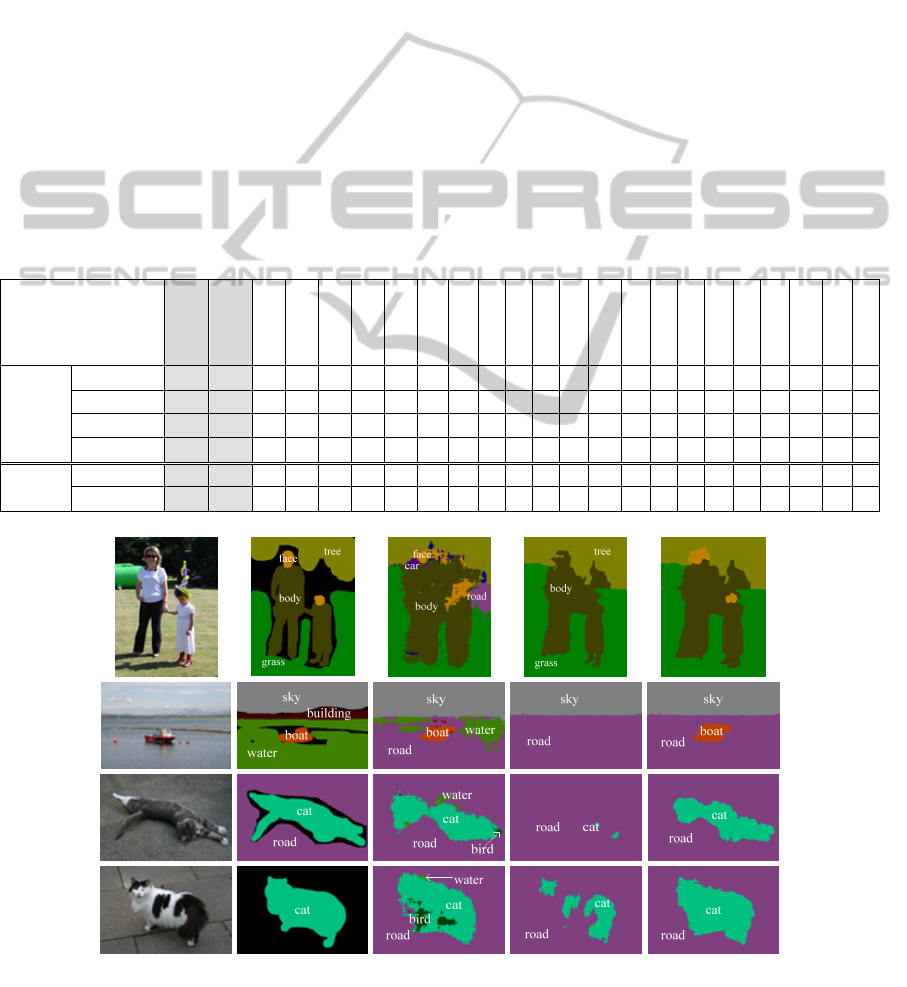
Some of the successful classification results are
depicted in Fig. 3 for visual evaluation. For objects
(such as face and boat in Fig. 3) with smaller sizes in
an image, they are often not discerned by the
algorithm in ALE. By contrast, the enhanced HCRF
model produces more pleasant results. Note that the
appearance between different object classes may be
similar, such as cat and road in the third row of Fig.
3. Moreover, intra-class appearances are often not
uniform, such as the cat in the fourth row of Fig. 3.
By using the enhanced HCRF model, objects can be
successfully segmented while the algorithm in ALE
can only produce broken fragments.
To have a more comprehensive understanding of
the failure cases, we focus on investigating the boat
class, which has the lowest classification accuracy as
shown in Table 1. From the confusion matrix, we
note that boat is often mis-classified as building
(20.5%), water (30.9%) or bicycle (17.5%).
Fig. 4 presents some of these cases for visual
evaluation. It can be seen that the major reason for
failure comes from the pixel-based RF classification.
In the pixel-based RF, low-level appearance
features over a region about each pixel are adopted
as the input to a boosted classifier (Ladicky et al.,
2009); (Shotton et al., 2006) to determine its class
label. However, overlaps in appearance features
Table 1: Classification accuracy on the MSRC-21 dataset in terms of percentage.
Global
Average
Building
Grass
Tree
Cow
Sheep
Sky
Aeroplane
Water
Face
Car
Bicycle
Flower
Sign
Bird
Book
Chair
Road
Cat
Dog
Body
Boat
ALE
M0 (1 P)
83.56 76.72 67 96 90 87 88 93 84 81 89 76 90 80 59 40 93 61 87 82 52 80 34
M1 (2 Ps) 84.03 77.19 69 96 91 88 90 93 85 81 89 77 91 81 59 41 93 59 87 84 52 82 34
M2 (3 Ps) 84.43 77.42 70 97 91 88 91 94 83 82 89 77 92 82 60 40 94 60 88 85 53 81 32
M3 (4 Ps) 86.87 77.67
76 99
91
75 86
99
78 88 87 76 88 93
76
51 95 65 92 68 52 79 18
Proposed
iM2 (3 Ps)
84.15 78.59 66 95 90 92 92 93 88 81 88 77 91 82 62 42 93 64 89 86 59 83 38
iM3 (4 Ps) 87.52 80.18
76 99
90
86 94
96
84 88 88 79 89 93
74
51 95 68 92 83 56 81 24
face
tree
body
grass
(a) (b) (c) (d) (e)
Figure 3: Some successful cases. (a) original image, (b) ground truth, (c) labeling result on unary potential, (d) labeling
result based on ALE, and (e) labeling result based on the enhanced HCRF model.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
220

(a) (b) (c) (d)
Figure 4: Some failure cases (a) Original image, (b) ground truth, (c) pixel-based RF and (d) enhanced HCRF.
(such as building and boat) between different classes
confuse the inference. Furthermore, in under-
segmented cases, objects with smaller block sizes
(such as boat) are often merged with the
background. As a result, the object classes cannot be
inferred properly by the proposed HCRF model. For
the bird class, which also has low classification
accuracy, similar observations can be made as
depicted in Fig. 4. Generally speaking, the major
misclassifications are ascribed to two aspects for the
pixel-based CRF model. One is being mis-classified
as one of the adjacent object classes, and the other is
mistakenly classified as the class with similar
appearance. Both problems are propagated to the
original HCRF model and the enhanced HCRF
model, which eventually have limited their
classification performance. If these problems can be
resolved, higher classification success is expected
for both models.
5 CONCLUSIONS
In conclusion, we have proposed an enhanced HCRF
model for semantic image segmentation in this paper
that performs significantly better in average
classification accuracy than existing similar models.
The proposed HCRF model consists of two
enhanced potentials. The new pairwise potential
comprises an additional Laplacian edge magnitude
together with the original color differences.
Moreover, it also propagates the believed labeling
determined by the unary potential to abate the over
smoothness effect that the pairwise potential
constraints lead to. The new segment-reliable
consistency potential on the other hand is capable of
selecting reliable segments to guide the inference.
We have evaluated the enhanced HCRF model on
the MSRC-21 data set, and the results show that the
proposed model has achieved notable improvements
in terms of both overall and average accuracy, when
compared with other HCRF models. With regard to
future research, focus will be placed on improving
the performance of the unary potential by
considering more discriminative features for object
classes such as boat, bird, dog and chair.
ACKNOWLEDGEMENTS
This research was supported by a grant from the
Research Grant Council of the Hong Kong Special
Administrative Region, China, under Project
HKU718912E.
REFERENCES
Boix, Xavier, Gonfaus, Josep M, van de Weijer, Joost,
Bagdanov, Andrew D, Serrat, Joan, & Gonzàlez, Jordi.
(2012). Harmony potentials. International journal of
computer vision, 96(1), 83-102.
Boros, Endre, & Hammer, Peter L. (2002). Pseudo-
boolean optimization. Discrete applied mathematics,
123(1), 155-225.
EnhancedHierarchicalConditionalRandomFieldModelforSemanticImageSegmentation
221

Boykov, Yuri, Veksler, Olga, & Zabih, Ramin. (2001). Fast
approximate energy minimization via graph cuts.
Pattern Analysis and Machine Intelligence, IEEE
Transactions on, 23(11), 1222-1239.
Boykov, Yuri Y, & Jolly, M-P. (2001). Interactive graph
cuts for optimal boundary & region segmentation of
objects in ND images. Paper presented at the
Computer Vision, 2001. ICCV 2001. Proceedings.
Eighth IEEE International Conference on.
Comaniciu, Dorin, & Meer, Peter. (2002). Mean shift: A
robust approach toward feature space analysis. Pattern
Analysis and Machine Intelligence, IEEE Transactions
on, 24(5), 603-619.
Felzenszwalb, Pedro F, & Huttenlocher, Daniel P. (2004).
Efficient graph-based image segmentation. Inter-
national Journal of Computer Vision, 59(2), 167-181.
He, Xuming, Zemel, Richard S, & Carreira-Perpinán,
Miguel A. (2004). Multiscale conditional random
fields for image labeling. Paper presented at the
Computer Vision and Pattern Recognition, 2004.
CVPR 2004. Proceedings of the 2004 IEEE Computer
Society Conference on.
Kohli, Pushmeet, Kumar, M Pawan, & Torr, Philip HS.
(2009). P³ & Beyond: Move Making Algorithms for
Solving Higher Order Functions. Pattern Analysis and
Machine Intelligence, IEEE Transactions on, 31(9),
1645-1656.
Kohli, Pushmeet, & Torr, Philip HS. (2009). Robust higher
order potentials for enforcing label consistency. Inter-
national Journal of Computer Vision, 82(3), 302-324.
Kumar, Sanjiv, & Hebert, Martial. (2005). A hierarchical
field framework for unified context-based
classification. Paper presented at the Computer Vision,
2005. ICCV 2005. Tenth IEEE International
Conference on.
Kumar, Sanjiv, & Hebert, Martial. (2006). Discriminative
random fields. International Journal of Computer
Vision, 68(2), 179-201.
Ladicky, Lubor, Russell, Chris, Kohli, Pushmeet, & Torr,
Philip HS. (2009). Associative hierarchical crfs for
object class image segmentation. Paper presented at
the Computer Vision, 2009 IEEE 12th International
Conference on.
Ladický, Ľubor, Russell, Chris, Kohli, Pushmeet, & Torr,
Philip HS. (2012). Inference Methods for CRFs with
Co-occurrence Statistics. International Journal of
Computer Vision, 1-13.
Lafferty, John, McCallum, Andrew, & Pereira, Fernando
CN. (2001). Conditional random fields: Probabilistic
models for segmenting and labeling sequence data.
Paper presented at the Proceedings of Machine
Learning.
MacQueen, James. (1967). Some methods for
classification and analysis of multivariate
observations. Paper presented at the Proceedings of
the fifth Berkeley symposium on mathematical
statistics and probability.
Plath, Nils, Toussaint, Marc, & Nakajima, Shinichi.
(2009). Multi-class image segmentation using
conditional random fields and global classification.
Paper presented at the Proceedings of the 26th Annual
International Conference on Machine Learning.
Rother, Carsten, Kohli, Pushmeet, Feng, Wei, & Jia, Jiaya.
(2009). Minimizing sparse higher order energy
functions of discrete variables. Paper presented at the
Computer Vision and Pattern Recognition, 2009.
CVPR 2009. IEEE Conference on.
Shi, Jianbo, & Malik, Jitendra. (2000). Normalized cuts
and image segmentation. Pattern Analysis and
Machine Intelligence, IEEE Transactions on, 22(8),
888-905.
Shotton, Jamie, Winn, John, Rother, Carsten, & Criminisi,
Antonio. (2006). Textonboost: Joint appearance, shape
and context modeling for multi-class object
recognition and segmentation. Paper presented at the
Computer Vision–ECCV 2006.
Szummer, Martin, Kohli, Pushmeet, & Hoiem, Derek.
(2008). Learning CRFs using graph cuts. Paper
presented at the Computer Vision–ECCV 2008.
Tan, Zhigang, & Yung, Nelson HC. (2008). Image
segmentation towards natural clusters. Paper presented
at the Pattern Recognition, 2008. ICPR 2008. 19th
International Conference on.
Torralba, Antonio, Murphy, Kevin P, & Freeman, William
T. (2004). Sharing features: efficient boosting
procedures for multiclass object detection. Paper
presented at the Computer Vision and Pattern
Recognition, 2004. CVPR 2004. Proceedings of the
2004 IEEE Computer Society Conference on.
Zhu, Shan-shan, & Yung, Nelson HC. (2011). Sub-scene
generation: A step towards complex scene
understanding. Paper presented at the Multimedia and
Expo (ICME), 2011 IEEE International Conference
on.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
222
