
Effect of Contralateral Condition during Bimanual Pinch Force
Control
Kazumi Critchley, Toshiyuki Kurihara and Tadao Isaka
Faculty of Sport and Health Science, Ritsumeikan University, Kusatsu, Shiga, Japan
Keywords: Bimanual, Pinch, Fine Motor Control.
Abstract: The purpose of this study is to investigate the effect of the interaction of different control of the opposite
side during bimanual finger pinch force output. Thirty two young adults (20.5±2.0y) participated in this
study. Participants were requested to control their pinch forces at 10%MVF with visual feedback.
Participants were asked to turn off their force output to zero (0%MVF) if visual feedback disappeared, and
maintain their force output at 10%MVF when it’s appeared. There are 4 different force producing types:
increase force output from 0 to 10%MVF (UP), decrease force output from 10 to 0%MVF (DOWN), keep
maintaining 10%MVF (KEEP) and waiting at 0%MVF force output level (WAIT). The error trial was
defined as when UP side of the hands’ force output exceeded 10.6%MVF. We calculated the error ratio as
the number of error trials per total numbers of trial. The number of error ratio was the fewest on UP&UP,
total 25/198 (Left: 17/96 Right: 8/96), followed by KEEP&UP total 52/192 (Left: 28/96, Right: 24/96) and
WAIT&UP total 64/191 (Left: 40/96, Right: 24/95). Most mistakable condition was DOWN&UP, total
81/192 (Left: 50/96, Right: 31/96). The overshoot error ratio in right hand was lower than that of left hand.
1 INTRODUCTION
In our daily life, we often use both hands at the same
time. During the bimanual movement, mirror-
symmetric movements are tending to produced
(Mechsner, 2001). In contrast, it is difficult to make
asymmetric movements and interference can occur
when two hands need to produce different forces or
directions (Harabst, 2000); (Hazeltine, 2003). It can
be said that control ability of one side limb is
affected by the other during bimanual movement.
The purpose of this study is to investigate the
effect of the interaction of different control of the
opposite side during bimanual movement. We
selected bimanual finger pinching as a task, because
finger pinching was often used for fine motor
control investigation.
2 METHODS
2.1 Participants
Thirty two young adults (20.5±2.0y) participated in
this study. All participants were right-handed,
evaluated by Edinburgh Handedness Inventory
(Oldfield, 1971). The participants gave informed
consent to the experimental procedures that had been
approved by the Local Ethics Committee.
2.2 Procedures
Before performing the experimental task, each
participant performed a series of finger-pinch
maximal voluntary force (MVF). During the MVF
measurement, participants were asked to press the
load cells with thumb and index finger as strong as
possible. The greatest value recorded in the two
MVF trials for a particular hand was considered as
the hand-specific MVF.
The experimental task was bimanual pinching
with thumb and index finger. Participants were
requested to control their pinch forces with visual
feedback of hand’s force production on the computer
monitor. Visual feedback was given each hand
separately. Target force was set at 10%MVF.
Participants were asked to turn off their force output
to zero (0%MVF) if visual feedback disappeared,
and maintain their force output at 10%MVF when
it’s appeared. We instructed them to switch the
control of their forces as quickly and accurately as
Critchley K., Kurihara T. and Isaka T..
Effect of Contralateral Condition during Bimanual Pinch Force Control.
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
possible. It consists of two switching points;
preliminary 5 s maintain both hands finger pinch
force output at 10%MVF, then disappearing or
appearing the feedback at 5 s (first switching point)
and remained till 10 s, then second switching point
at 10 s after the beginning of the measurement. The
task continues 15 s and participants didn’t know the
timing of switching point (Figure 1).
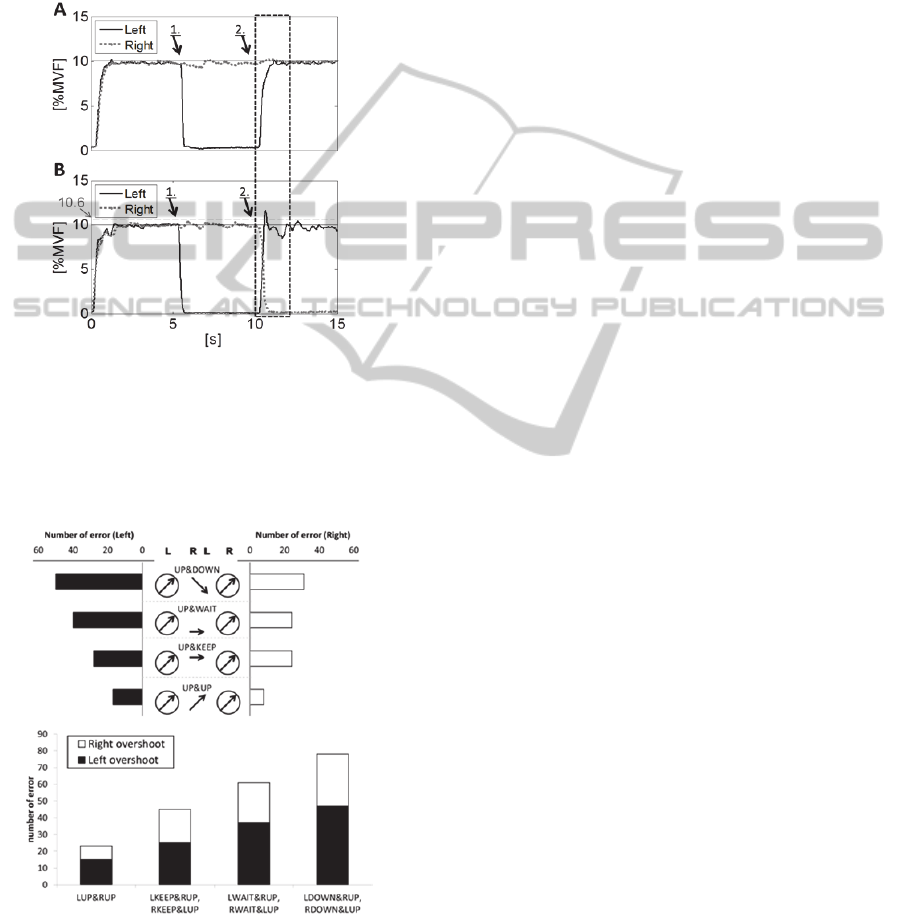
Figure 1: Representative force outputs for two conditions.
A: Force output of LUP&RKEEP condition. B: Force
output of LUP&RDOWN condition. 1 indicates first
switching point (after 5seconds) and 2 indicates second
switching point (after 10seconds). Rectangle with broken
line indicates analyzing area. Left hand force output
exceeded 10.6%MVF on B, became overshoot error trial.
Figure 2: Number of overshoot error. Graph above shows
a number of left and right overshoot error separately.
Arrows inside the circle denote UP side while arrows in
the middle of them indicate the opposite sides required
force production (UP, DOWN, KEEP and WAIT). Graph
below shows the total number of overshoot error.
2.3 Data Analysis
We focused on second switching point (Figure 1).
There are 4 different force producing types: increase
force output from 0 to 10%MVF (UP), decrease
force output from 10 to 0%MVF (DOWN), keep
maintaining 10%MVF (KEEP) and waiting at
0%MVF force output level (WAIT). Combination of
them with both hands, there are 7 different
conditions: LUP&RUP, LUP&RDOWN,
RUP&LDOWN, LUP&RKEEP, RUP&LKEEP,
LUP&RWAIT and RUP&LWAIT. Participants
engaged three trials on each condition, arranged in
random order. The error trial was defined as when
UP side of the hands’ force output exceeded
10.6%MVF before 2 s from second switching point.
We calculated the error ratio as the number of error
trials per total numbers of trial.
3 RESULTS
Error ratio of each condition was shown in Figure2.
The number of error ratio was the fewest on
UP&UP, total 25/198 (Left: 17/96 Right: 8/96),
followed by KEEP&UP total 52/192 (Left: 28/96,
Right: 24/96) and WAIT&UP total 64/191 (Left:
40/96, Right: 24/95). Most mistakable condition was
DOWN&UP, total 81/192 (Left: 50/96, Right:
31/96). A chi-square test of independence was
performed to examine the relationship between
experimental tasks and overshoot error ratio. The
relation between these variables was
significant,Χ
3, 767
42.3, 0.05.
4 DISCUSSION
When controlling one side of limb’s force output to
certain target, overshoot error is influenced by the
other side’s force producing type. It is easy to
control target force output when both hand’s task are
same force producing type. In contrast, it becomes
difficult to control force output when anti-phase task
is required on the other side. This may because the
attention to the difficulty and complexity of the
other side’s limb movement and/or task disturbs the
control of the force output.
The overshoot error ratio in right hand was lower
than that of left hand. Certainly, the participants
were all right-handed. Dominant limb is specialized
for dynamic, feed-forward controlled unimanual
tasks (Sainburg, 2002). There was relatively lower

difference, however, between right and left error
ration in UP&KEEP condition. In this condition,
10%MVF kept in one side seems to work as the
reference point for the other side that raising force
output from zero to 10%MVF. This reference was
same on right and left hand and maybe made easy to
increase force with feed-forward control.
The tasks used in this study were including with
the cognitive reaction task since the participants
were required to react as quickly and accurately as
possible. In order to clarify the bimanual fine motor
control, further studies are needed to expel the
anticipation of required force output.
REFERENCES
Franz, E. A. (1997). Spatial coupling in the coordination
of complex actions. Q J Exp Psychol A, 50(3), 684-
704. doi: 10.1080/713755726.
Harabst, K. B., Lazarus, J. A., & Whitall, J. (2000).
Accuracy of dynamic isometric force production: the
influence of age and bimanual activation patters.
Motor Control, 4(2), 232-256.
Mechsner, F., Kerzel, D., Knobiich, G., & Prinz, W.
(2001). Perceptual basis of bimanual coordination.
Nature, 414, 69-73.
Oldfield, R. C. (1971). The assessment and analysis of
handedness: the Edinburgh inventory. Neuropsychol, 9,
97-113.
Sainburg, R. L. (2002). Evidence for a dynamic-
dominance hypothesis of handedness. Exp Brain Res,
142(2), 241-258. doi: 10.1007/s00221-001-0913-8.
