
Conscious Drive to Stiffen the Leg Spring
Motor Strategies for an Internal Challenge
Mervyn Travers
1
, James Debenham
2
, William Gibson
2
, Amity Campbell
1
and Garry Allison
1
1
School of Physiotherapy and Exercise Science, Curtin University, GPO box 1987, WA 6845, Bentley, Australia
2
University of Notre Dame, School of Physiotherapy, 19 Mouat Street, Fremantle, WA 6959, Australia
Keywords: Feed-forward, Stretch-shortening Cycle, Stiffness, Internal Challenge.
Abstract: This study investigated the kinematic and muscle activity profiles at the ankle under two hopping conditions
that consciously altered leg stiffness. Nine healthy volunteers performed multiple trials of bilateral hopping
on a custom built sleigh under two conditions – preferred (PC) and short contact (SC). Leg stiffness, peak
EMG, time to peak EMG and co-activation ratios for the medial gastrocnemius (MG), soleus (Sol) and
tibialis anterior (TibAnt) muscles were compared across conditions. SC hopping resulted in increased leg
stiffness. Importantly, Sol onset shifted from 86ms post-contact during PC to 14ms post-contact for SC.
Similarly, MG onset was 41ms post-contact during PC and 22ms pre-contact for SC. Significantly earlier
onsets of Sol and MG represent a shift into the feed-forward window which was not reflected by TibAnt.
Comparisons revealed no significant differences in co-activation ratios (p>0.05) suggesting that increased
leg stiffness during SC hopping was not a result of increased co-activation. Instead a dynamic strategy
pairing pre-activation with an increased rate of activity of the agonist muscles to develop force in time for
contact with the surface was observed. We suggest that the optimal strategy to consciously drive increased
leg stiffness occurs via a feedforward response.
1 OBJECTIVES
It is well-established that simultaneous contraction
of primary agonist and antagonist muscle groups
(i.e. muscle co-activation) will increase the stiffness
of a joint (Blickhan, 1989). This process is
considered protective, for example when landing
(Santello, 2005); (Yeadon et al., 2010). Furthermore,
such co-activation has been observed at the knee in
athletes following anterior cruciate ligament repair
(Bryant et al., 2009) and in the lumbar region in
clinical pain cohorts (Hodges et al., 2009); (Morris
et al., In Press: 2013); (Moseley et al., 2004); (van
Dieën et al., 2003). The common experimental
paradigm for investigating stiffness modulation
utilises external challenges including hopping and
running on surfaces of varying rigidity (Ferris et al.,
1999); (Ferris and Farley, 1997); (Moritz et al.,
2004), running on uneven surfaces (Müller and
Blickhan, 2010) and even reduced cutaneous
feedback during hopping (Fiolkowski et al., 2005).
The existing literature does not consider the
potential differences in motor strategies responsible
for stiffness modulation in response to internal
challenges. It cannot be assumed that humans would
utilise the same motor strategies to adapt to both
internal and external challenges. In fact, a previous
study has used conscious effort (an internal
challenge) to increase stiffness during hopping by
reducing ground contact time (Hobara et al., 2007).
Interestingly, they observed increased stiffness
without muscle co-activation (Hobara et al., 2007)
suggesting that the conscious drive to produce a
“stiffer” performance may have its own unique
motor strategies. Yet, these specific motor strategies
remain unstudied despite being relevant to
optimising running performance (Hobara et al.,
2010). The specific motor patterns responsible for
stiffness modulation under internal challenges are
relevant to performance, injury and rehabilitation.
The ankle joint is the major determinant of lower
limb stiffness during low load tasks (Farley and
Morgenroth, 1999); (Moritz et al., 2004). This study
examined the muscle activity profile changes at the
ankle associated with consciously driven increase in
leg stiffness during repeated submaximal hopping.
Travers M., Debenham J., Gibson W., Campbell A. and Allison G..
Conscious Drive to Stiffen the Leg Spring - Motor Strategies for an Internal Challenge.
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
2 METHODS
This study utilised a within-subject experimental
design. Nine healthy participants performed multiple
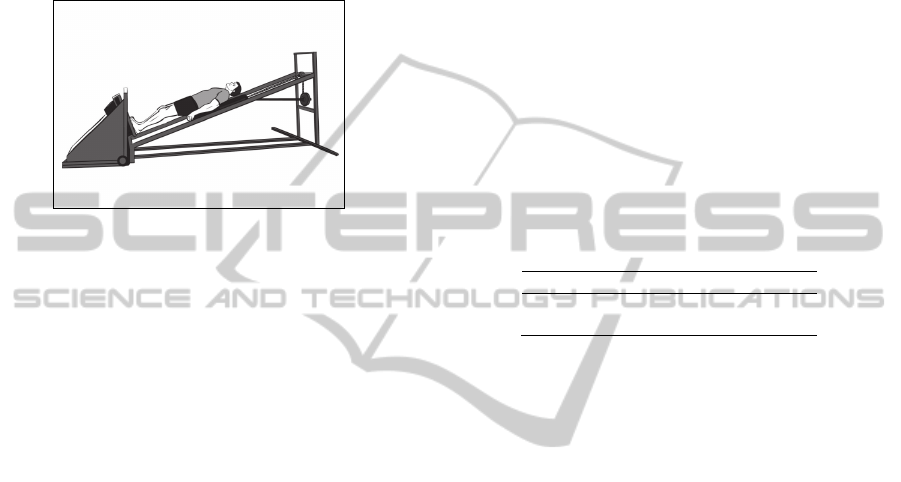
hopping trials on a Custom Built Sleigh Apparatus
(Figure 1). The sleigh incorporated an instrumented
(AMTI forceplate 1kHz sampling) landing platform
allowing the establishment of event markers.
Figure 1: Double leg hopping on the Custom Built Sleigh
Apparatus inclined at 20degrees from horizontal.
Each Trial involved 10 continuous bilateral hops
on the sleigh apparatus (median 6 used for analysis).
Participants minimised any associated knee flexion
(no external fixation was used) so that performance
was primarily driven by the ankles. Three trials were
performed under two different conditions – preferred
ground contact time (PC), and with as short a
contact time as possible (SC).
Surface EMG for the medial gastrocnemius
(MG), soleus (SOL), and the tibialis anterior
(TibAnt) muscles was collected using an AMT-8
(Bortec Biomedical Ltd.) system. The EMG signal
was full wave rectified and onsets detected using the
integrated protocol (Allison, 2003). Trial linear
envelopes were created using a fourth-order zero-
lag, Butterworth low-pass filter (10 Hz) and
temporally synchronised to foot contact. Ensemble
average LE were determined for a 760ms window
(280ms pre-contact to 480ms post-contact). The
feedforward window was defined at 33ms post-
contact (Voigt et al., 1998). EMG signals were
integrated in 20ms epochs (IEMG) for the 760ms
window. The median peak of 10 PC hops was used
as a 1.0 arbitrary unit for amplitude normalisation
(Allison et al., 1993).
Leg Stiffness (K) was calculated using the
formula below (Dalleau et al., 2004):
K = (M x П(t
f
+ t
c
)
----------------
(t
c
2
((t
f
+ t
c
/ П) – (t
c
/ 4)))
Figure 2: Formula for estimating leg stiffness (K); M =
body mass; tf= flight time; tc = ground contact time.
Co-activation was defined as the ratio of the
agonist (MG and Sol) and antagonist (TibAnt)
muscle activity and co-activation ratios were
labelled MG/TibAnt and Sol/TibAnt.
Paired samples t-tests were used to compare
differences in K, co-activation ratios and onset times
between conditions. A linear mixed model was
utilised to identify any significant difference in onset
times for each muscle grouped for condition and
side. It was further used to investigate any
interaction between condition, side and muscle with
onset time as the dependant variable.
3 RESULTS
The participants demonstrated a significant increase
in K during SC hopping (Table 1).
Table 1: Leg Stiffness (kN.m-1) by Condition.
Condition Stiffness (SD) p
PC 9.20 (2.58)
SC 14.16 (3.09)* p <.001
The peak EMG amplitude was not significantly
different for any muscle between PC and SC.
Further, there was no significant interaction between
side and hopping condition (F =.182, p = .671) nor
main effects for side (F =.284, p = .596) or condition
(F = .690, p = .409).
Sides were pooled for EMG onsets and time to
peak EMG as there was no significant interaction
between side and muscle or condition (p > 0.05).
The Sol onset time was 86ms (95% CI 58ms to
114ms) post-contact for the PC condition and 14ms
(95% CI -7ms to 36ms) post-contact for the SC
condition (F = 58.145, p <.001). The MG onset time
was 41ms (95% CI 25ms to 57ms) post-contact for
the PC condition and 22ms (95% CI 35ms to 9ms)
post-contact for the SC condition (F = 56.137, p
<.001). The TibAnt onset was not altered
significantly between conditions (p = .062).
Peak Sol activity occurred at 200ms (95% CI
184ms to 216ms) post-contact for PC and was
significantly earlier (p <.001) for SC occurring at
114ms post-contact (95% CI 101ms to 125ms).
Similarly, peak MG activity occurred at 195ms post-
contact (95% CI 179ms to 211ms) and was
significantly earlier (p <.001) for SC occurring at
102ms post-contact (95% CI 91ms to 114ms). The
time to peak activity for TibAnt was not
significantly different between conditions (p < .05).
Finally, comparisons revealed no significant
differences in MG/TibAnt and Sol/TibAnt co-

activation ratios between PC and SC (p>0.05).
4 DISCUSSION
Both MG and Sol demonstrated earlier onsets during
SC hopping. This represented a change from
potential feedback latency to a clear feedforward
response with onsets occurring within the defined
33 (+/- 7)ms window (Voigt et al., 1998).
Importantly, this was not matched by TibAnt.
Specifically, our findings demonstrate that in the
presence of a controlled environment and self-
regulation of the pending challenge and
consequences (i.e. the choice of hopping contact
time on a stable sleigh) individuals may choose a
feedforward strategy instead of the established co-
activation strategy. We observed a dynamic strategy
of pre-activation with an increased rate of activity of
the agonist muscle to develop force in time for
contact with the surface.
5 CONCLUSIONS
This study investigated the neural control of
consciously driven increase in joint stiffness during
submaximal hopping. We observed a stiffer hopping
performance driven by a feedforward strategy
confirming our hypothesis that internal challenges to
performance have their own unique motor strategies.
ACKNOWLEDGEMENTS
This research was partly supported by a grant from
the Neurotrauma Research Program – WA.
REFERENCES
Allison, G. T. 2003. Trunk Muscle Onset Detection
Technique For Emg Signals With Ecg Artefact.
Journal Of Electromyography And Kinesiology, 13,
209-216.
Allison, G. T., Marshall, R. N. & Singer, K. P. 1993. Emg
Signal Amplitude Normalization Technique In
Stretch-Shortening Cycle Movements. Journal Of
Electromyography And Kinesiology, 3, 236-244.
Blickhan, R. 1989. The Spring-Mass Model For Running
And Hopping. Journal Of Biomechanics, 22, 1217-
1227.
Bryant, A., Newton, R. & Steele, J. 2009. Successful
Feed-Forward Strategies Following Acl Injury And
Reconstruction. Journal Of Electromyography And
Kinesiology, 19, 988-997.
Dalleau, G., Belli, A., Viale, F., Lacour, J. & Bourdin, M.
2004. A Simple Method For Field Measurements Of
Leg Stiffness In Hopping. International Journal Of
Sports Medicine, 25, 170-176.
Farley, C. & Morgenroth, D. 1999. Leg Stiffness Primarily
Depends On Ankle Stiffness During Human Hopping.
Journal Of Biomechanics, 32, 267-273.
Ferris, D., Liang, K. & Farley, C. 1999. Runners Adjust
Leg Stiffness For Their First Step On A New Running
Surface. Journal Of Biomechanics, 32, 787-794.
Ferris, D. P. & Farley, C. T. 1997. Interaction Of Leg
Stiffness And Surface Stiffness During Human
Hopping. Journal Of Applied Physiology, 82, 15-22.
Fiolkowski, P., Bishop, M., Brunt, D. & Williams, B.
2005. Plantar Feedback Contributes To The
Regulation Of Leg Stiffness. Clinical Biomechanics,
20, 952-958.
Hobara, H., Inoue, K., Gomi, K., Sakamoto, M., Muraoka,
T., Iso, S. & Kanosue, K. 2010. Continuous Change In
Spring-Mass Characteristics During A 400 M Sprint. J
Sci Med Sport, 13, 256-61.
Hobara, H., Kanosue, K. & Suzuki, S. 2007. Changes In
Muscle Activity With Increase In Leg Stiffness During
Hopping. Neuroscience Letters, 418, 55-59.
Hodges, P., Van Den Hoorn, W., Dawson, A. &
Cholewicki, J. 2009. Changes In The Mechanical
Properties Of The Trunk In Low Back Pain May Be
Associated With Recurrence. Journal Of
Biomechanics, 42, 61-66.
Moritz, C., Greene, S. & Farley, C. 2004. Neuromuscular
Changes For Hopping On A Range Of Damped
Surfaces. J Appl Physiol, 96, 1996-2004.
Morris, S., Lay, B. & Allison, G. In Press: 2013.
Transversus Abdominis Is Part Of A Global Not Local
Muscle Synergy During Arm Movement. Human
Movement Science.
Moseley, G. L., Nicholas, M. K. & Hodges, P. W. 2004.
Does Anticipation Of Back Pain Predispose To Back
Trouble? Brain, 127, 2339-2347.
Müller, R. & Blickhan, R. 2010. Running On Uneven
Ground: Leg Adjustments To Altered Ground Level.
Human Movement Science, 29, 578-589.
Santello, M. 2005. Review Of Motor Control Mechanisms
Underlying Impact Absorption From Falls. Gait &
Posture, 21, 85-94.
Van Dieën, J. H., Selen, L. P. J. & Cholewicki, J. 2003.
Trunk Muscle Activation In Low-Back Pain Patients,
An Analysis Of The Literature. Journal Of
Electromyography And Kinesiology, 13, 333-351.
Voigt, Dyhre, P. & Simonsen 1998. Modulation Of Short
Latency Stretch Reflexes During Human Hopping.
Acta Physiologica Scandinavica, 163, 181-194.
Yeadon, M. R., King, M. A., Forrester, S. E., Caldwell, G.
E. & Pain, M. T. 2010. The Need For Muscle Co-
Contraction Prior To A Landing. J Biomech, 43, 364-
9.
