
Robotic Grasp Initiation by Gaze Independent Brain-controlled
Selection of Virtual Reality Objects
Christoph Reichert
1,2
, Matthias Kennel
3
, Rudolf Kruse
2
, Hans-Jochen Heinze
1,4,5
, Ulrich Schmucker
3
,
Hermann Hinrichs
1,4,5
and Jochem W. Rieger
6
1
Department of Neurology, University Medical Center A.ö.R., D-39120, Magdeburg, Germany
2
Department of Knowledge and Language Processing, Otto-von-Guericke University, D-39106, Magdeburg, Germany
3
Fraunhofer Institute for Factory Operation and Automation IFF, D-39106, Magdeburg, Germany
4
Leibniz Institute for Neurobiology, D-39118, Magdeburg, Germany
5
German Center for Neurodegenerative Diseases (DZNE), D-39120, Magdeburg, Germany
6
Department of Applied Neurocognitive Psychology, Carl-von-Ossietzky University, D-26111, Oldenburg, Germany
Keywords: BCI, P300, Oddball Paradigm, Grasping, MEG.
Abstract: Assistive devices controlled by human brain activity could help severely paralyzed patients to perform
everyday tasks such as reaching and grasping objects. However, the continuous control of anthropomorphic
prostheses requires control of a large number of degrees of freedom which is challenging with the currently
achievable information transfer rate of noninvasive Brain-Computer Interfaces (BCI). In this work we
present an autonomous grasping system that allows grasping of natural objects even with the very low
information transfer rates obtained in noninvasive BCIs. The grasp of one out of several objects is initiated
by decoded voluntary brain wave modulations. A universal online grasp planning algorithm was developed
that grasps the object selected by the user in a virtual reality environment. Our results with subjects
demonstrate that training effort required to control the system is very low (<10 min) and that the decoding
accuracy increases over time. We also found that the system works most reliably when subjects freely select
objects and receive virtual grasp feedback.
1 INTRODUCTION
Brain-Computer Interfaces (BCI) translate human
brain activity to machine commands (Wolpaw,
2013) and are in the focus of research to replace
motor functions of severely paralyzed patients. In
these patients, peripheral nerves do not provide any
signal, like the electromyogram (EMG), to control
prostheses (Kuzborskij et al., 2012). In the recent
years, highly invasive techniques were tested to
control prosthetic devices by voluntary modulation
of brain activity (Hochberg et al., 2012; Velliste et
al., 2008). In humans, the use of noninvasive
techniques, like the electroencephalogram (EEG), is
preferable over invasive recordings. Recently, it has
been shown that a large number of hand movements
can be discriminated with noninvasive EMG
(Kuzborskij et al., 2012). However, only a small
number of commands can be discriminated with
noninvasively assessed motor imagery and, as a
consequence, these systems do not allow for full
control of complex manipulators with many degrees
of freedom. Here we report progress in our
development of a noninvasive BCI that enables users
to grasp natural objects. Our approach combines the
development of both efficient brain decoding
techniques and autonomous actuator control to
overcome the limited information transfer from
noninvasive BCIs.
Commonly, movement commands are generated
by motor imagery tasks aiming to decode the
µ-rhythm (Pfurtscheller et al., 2000). However, a
considerable percentage of people are unable to
control motor imagery BCIs (Guger et al., 2003;
Vidaurre and Blankertz, 2010). In contrast, it was
shown that a larger fraction of people is able to
select items in speller paradigms using an oddball
task (Guger et al., 2009). The matrix speller was first
5
Reichert C., Kennel M., Kruse R., Heinze H., Schmucker U., Hinrichs H. and W. Rieger J..
Robotic Grasp Initiation by Gaze Independent Brain-controlled Selection of Virtual Reality Objects.
DOI: 10.5220/0004608800050012
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (NEUROTECHNIX-2013), pages 5-12
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

introduced by Farwell and Donchin (1988). In the
oddball task a P300, a positive EEG deflection, is
evoked when a rare target stimulus appears in a
series of irrelevant stimuli. While it is often assumed
that the accuracy of visually stimulated P300 speller
is independent of gaze direction, it has recently been
shown that the performance of the matrix speller
drops significantly if the eyes are not moved toward
the target (Brunner et al., 2010). The reason is that
two EEG components, the P300 and the N200,
contribute information when the centre of regard is
moved to the target (Frenzel et al., 2011), whereas
only the P300 is present if the eyes don’t move. This
could render the P300 paradigm less useful for
patients who cannot move their eyes.
In this work we demonstrate that the visual
oddball paradigm can be successful applied to
initiate targeted grasps in a visually complex virtual
environment with multiple realistic objects.
Importantly, we show that the paradigm developed
here works independent of the user’s ability to direct
gaze towards the target object. This is of high
relevance for the targeted user group.
The other approach in our strategy for the
development of a brain controlled robotic
manipulator is to implement an algorithm to provide
intelligent autonomous manipulation of predefined
objects. Here we propose a new analytical grasp
planning algorithm to achieve autonomous grasping
of arbitrary objects. In contrast to other motion
planning algorithms, our algorithm is not based on
Learning by Demonstration (for a review see
Sahbani, El-Khoury and Bidaud (2012)) and
involves, but is not limited to, the robot’s
kinematics.
2 MATERIALS AND METHODS
In this study we decoded in real-time the
magnetoencephalogram (MEG) of 17 subjects
(9 male, 8 female, mean age 26.6) to determine their
intention to select one of six selectable realistic
objects for grasping. We used the decoding results to
initiate a grasp of a robotic gripper. All subjects
gave written informed consent. The study was
approved by the ethics committee of the Medical
Faculty of the Otto-von-Guericke University of
Magdeburg.
2.1 Virtual Environment
We presented six objects (see Figure 1) placed at
fixed positions in a virtual reality environment. The
visual angle between outmost left and right objects
was 8.5°. We defined circular regions on the table
which were used i) to stimulate the subjects with
visual events by lighting up the object background
and ii) to provide cues and feedback by colouring
the region’s shape. A photo transistor placed on the
screen was used to synchronize the ongoing MEG
with the events displayed on the screen. To provide
realistic feedback, the model of a robot (Mitsubishi
RV E2) equipped with a three finger gripper
(Schunk SDH) was part of the scene. The virtual
robot is designed to mimic actual movements of the
real robot. Specifically, an autonomously calculated
grasp to the selected object is visualized.
Figure 1: VR scenario used for visual stimulation. This
snapshot shows one flash event of an object.
2.2 Paradigm
The paradigm we employed is based on the P300
potential which is evoked approximately 300 ms
after a rare target stimulus occurs in a series of
irrelevant stimuli (oddball paradigm). In our variant
of the paradigm, we marked objects by flashing their
background for 100 ms. Objects were marked in
random order with an interstimulus interval of
300 ms. Each object was marked five times per
selection trial resulting in a stimulation interval
length of 10 seconds.
Subjects were instructed to fixate the black cross
centred to the objects and to count how often the
target object was marked. The counting ensured that
attention was maintained on the stimulus stream. In
addition, subjects were instructed to avoid eye
movements and blinking during the stimulation
interval.
Each subject performed a minimum of seven
runs with 18 selection trials per run. The runs were
performed in three different modes that served
different purposes. The number of runs each subject
performed in each mode is listed in Table 1. We
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
6
started with the instructed selection mode. In this
mode, the target object was cued by a light grey
circle at the beginning of a trial and subjects were
instructed to attend the cued object. Instructed
selection was used in the initial training runs in
which we collected data to train the classifier. In this
mode true classifier labels are available which are
required to train the classifier. We provided random
feedback during training runs because no classifier
was available in these initial runs. After the training
runs, each subject performed several instructed runs
with feedback. We denoted the second selection
mode free selection. In this mode, subjects were free
to choose the target object. In instructed selection
mode and in free selection mode, a green circle was
presented at the end of the trial on the decoded
object as feedback. All other objects were marked by
red circles. Free selection runs were performed after
the instructed selection runs. In the third mode, the
grasp selection mode, the virtual robot grasped and
lifted the decoded target for feedback. Grasp
selection runs were performed after free selection
runs. In both modes, the free selection and grasp
selection mode, the subject said “no” to signal that
the classifier decoded the wrong object and
remained silent otherwise.
Table 1: Number of runs the subjects performed in
different selection modes.
Subject
#
instructed
free grasp
training decoder
1 2 5 - -
2 4 4 1 -
3 3 4 - -
4-6 3 4 1 1
7 2 4 2 1
8 3 3 2 1
9 2 4 2 1
10 2 4 2 -
11 2 4 2 1
12 2 5 2 -
13-17 2 4 2 1
The results reported in this paper arise from online
experiments. We did not exclude early sessions,
causing slight changes in the experimental protocol
during the study (Table 1). The number of runs
performed in the different modes depended on cross
validated classifier performance estimation and the
development of detection accuracy. In total, five
subjects performed three, one subject four and the
remaining 11 subjects two initial training runs. Two
subjects performed only instructed selections.
Twelve of the subjects performed one run in the
grasp selection mode. Here, only six instead of 18
trials were performed, due to the longer feedback
duration.
2.3 Data Acquisition and Processing
The MEG was recorded with a whole-head BTi
Magnes 248-sensors system (4D-Neuroimaging, San
Diego, CA, USA) at a sampling rate of 678.17 Hz.
Simultaneously, the electrooculogram (EOG) was
recorded for subsequent inspection of eye
movements. MEG data and event channels were
instantaneously forwarded to a second workstation
capable of processing the data in real-time. The data
stream was cut into intervals including only the
stimulation sequence. The MEG data were then
band-pass filtered between 1 Hz and 12 Hz and
down sampled to 32 Hz sampling rate. Then, the
stimulation interval was cut in overlapping 1000 ms
segments starting at each flash event. In instructed
selection mode, the segments were labelled as target
or nontarget segments depending on whether the
target or a nontarget object was marked.
We used a linear support vector machine (SVM)
as classifier because it provided reliably high
performance in single trial MEG discrimination
(Quandt et al., 2012; Rieger et al., 2008). These
previous studies showed that linear SVM is capable
of selecting appropriate features in high dimensional
MEG feature spaces. We performed classification in
the time domain, meaning that we used the magnetic
flux measured in 32 time steps as classifier input. To
reduce the dimensionality of the feature space, we
empirically excluded 96 sensors located farthest
from the vertex (the midline sensor at the position
halfway between inion and nasion) which is the
expected site of the P300 response. We further
reduced the number of sensors by selecting the 64
sensors providing the highest sum of weights per
channel in an initial SVM training on all preselected
152 sensors of the training run data. The selected
feature set (64 sensors × 32 samples = 2048
features) was then used to train the classifier again
and retrain the classifier after each run conducted in
instructed selection mode.
2.4 Grasping Algorithm
In this section we describe the general procedure of
our grasp planning algorithm, whereas we present
the mathematical details in the Appendix. The
algorithm was developed to physically drive a robot
arm, but in this experiment it was used to provide
virtual reality feedback. Importantly, in this strategy
the robot serves as an intelligent, autonomous
RoboticGraspInitiationbyGazeIndependentBrain-controlledSelectionofVirtualRealityObjects
7
actuator and does not drive predefined trajectories.
The algorithm assumes that object position and
shape coordinates relative to the manipulator are
known to the system. In this experiment, coordinates
of CAD-modelled objects were used. However,
coordinates could as well be generated by a 3D
object recognition system.
Central to our approach is that the contact
surfaces of the gripper’s fingers and the surfaces of
the objects were rasterized with virtual point poles.
We assumed an imaginary force field between the
poles on the manipulator and the poles on the target
object (see Appendix for details). The goal of the
algorithm is to initially generate a manipulator
posture that ensures a force closure grasp. The
following grasp is organized by closing the hand in a
real world scenario and by locking the object
coordinates relative to the finger surface coordinates
in the virtual scenario.
3 RESULTS
3.1 Decoder Accuracy
We determined the decoding accuracy as the ratio of
correctly decoded objects divided by the total
number of object selections. All subjects performed
the task reliably above guessing level which was
16.7 %. On average, the intended object selections
were correctly decoded from the MEG data in
77.7 % of all trials performed. Single subject
accuracies ranged from 55.6 % to 92.1 %. In the
instructed selection mode the average accuracy was
73.9 % and 85.9 % in the free selection mode. This
performance difference is statistically significant
(Wilcoxon rank sum test: p=0.03). When subjects
received feedback by moving the virtual robot to the
grasp target, the average accuracy was even higher
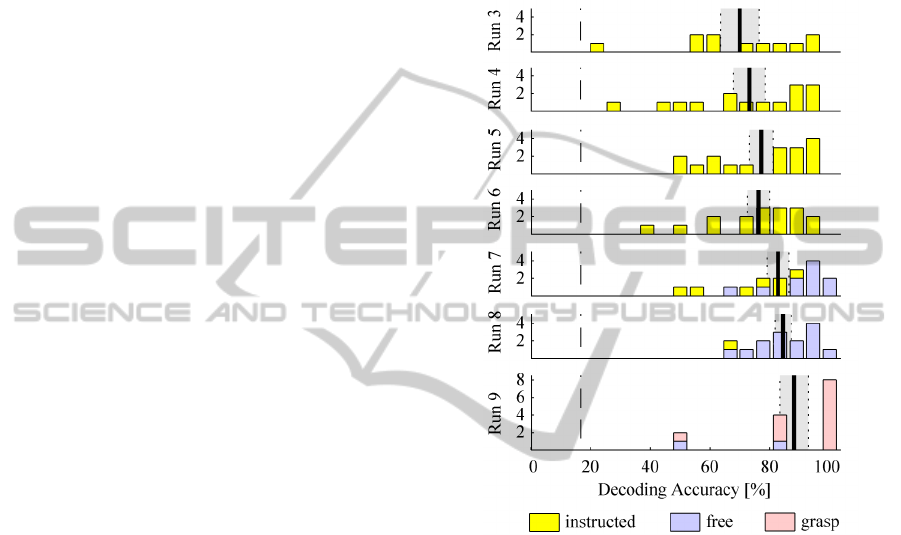
and reached 91.2 %. Figure 2 depicts the evolution
of decoding accuracies over runs. The height of the
bars indicates the number of subjects (y-axis) who
achieved the respective decoding performance out of
19 possible percentage bins. Each histogram shows
the results from one run and the performance bins
are equally spaced from 0 % to 100 %. The
histograms are chronologically ordered from top to
bottom. Yellow bars indicate results from instructed
selection runs, blue bars indicate free selection run
results and light red bars indicate results in runs with
grasp feedback. Vertical dashed lines indicate the
guessing level and thick solid lines indicate the
average decoding accuracies over subjects (standard
error marked grey). The average decoding accuracy
increases gradually over the course of the
experiment. Moreover, the histograms show that the
highest accuracy over subjects was achieved in free
selection runs. Note that our system achieved perfect
detection in eight of the twelve subjects who
received virtual grasp feedback. However, only six
selections were performed by each subject in these
grasp selection runs.
Figure 2: Performance histograms. The ordinate indicates
the number of subjects who achieved a certain decoding
accuracy. The histograms show data from different runs
and code the type of run by colour. See text for details.
An established measure for the comparison of BCIs
is the information transfer rate (ITR) which
combines decoding accuracy and number of
alternatives to a unique measure. We calculated the
ITR according to the method of Wolpaw et al.
(2000) at 3.4 to 12.0 bit/min for single subjects and
8.1 bit/min on average. Note that the maximum
achievable bit rate with the applied stimulation
scheme is 15.5 bit/min.
For online eye movement control, we observed
the subjects’ eyes on a video screen. In addition, we
inspected the EOG measurements offline. Both
methods confirmed that subjects followed the
instruction to keep fixation.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
8
3.2 Grasping Performance
We evaluated the execution duration of the online
grasp calculation for different setups and objects.
We implemented our grasping algorithm with the
ability to distribute force computations to several
parallel threads. Here, we permitted five threads
employing a 2.8 GHz AMD Opteron 8220 SE
processor. We calculated grasps of the six objects
shown in Figure 1. To assess effects of object
position, we arranged the objects at different
positions within the limits of our demonstrating
robot’s work space. Each object was placed once at
each of the positions depicted in Figure 1. The time
needed to plan the trajectory and execute the grasp
until reaching force closure is listed in Table 2 for
each object/position combination. The diagonal of
the table represents the actual object/position setup
during our experiment.
Table 2: Duration of grasp planning calculation for all
object/position combinations in seconds. UL=upper left,
LL=lower left, UR=upper right, LR=lower right.
Object
position
Object #
#1 #2 #3 #4 #5 #6
Left
33.0
68.5 11.0 14.1 16.0 24.5
UL 25.5
34.0
16.5 13.5 39.0 46.7
LL 11.0 72.6
11.0
18.0 22.5 65.0
UR 15.5 42.5 15.0
12.5
37.0 46.0
LR 12.0 48.5 11.0 19.0
22.5
24.5
Right 11.0 35.6 13.0 14.5 19.5
29.5
The results indicate that the duration of grasp
planning depends on many parameters. The most
important determinant of execution time is the
number of point poles (Ο
)) which depends on the
level of detail of the object surface as well as the
physical constraints of the robot and object position.
We observed that even minimal differences in object
arrangement appear to have strong influence on
force closure termination. This is also indicated by
different execution times of identical objects at
symmetric positions (e.g. left/right). We consider it
likely that these differences are caused by numerical
precision issues due to the high number of
summations in equations (3) and (4) (see Appendix).
4 DISCUSSION
In the present work we demonstrated that the
oddball paradigm is well suited for use in a BCI to
reliably select one of several objects for grasping.
Importantly, this was achieved independent from eye
movements. We demonstrated that the performance
of the system improves with training. Furthermore,
our results suggest that performance improves even
further when subjects obtain more control in the free
selection and with realistic visual feedback. This
suggests that BCI control in our P300 paradigm is
improved with an increasing sense of agency.
A gaze independent BCI based on directing covert
attention is a fundamental requirement for patients
who cannot easily orient gaze to the target object.
Earlier reports suggested that eye movements greatly
improve performance in a P300 speller (Brunner et
al., 2010; Frenzel et al., 2011; Treder and Blankertz,
2010), due to contribution from visual areas to brain
wave classification (Bianchi et al., 2010). We extend
these previous studies and show that the P300-
paradigm is well suited for a gaze independent
object grasping BCI. We achieved independence
from visual components by instructing our subjects
to fixate and by excluding occipital sensors from the
analysis. This approach simulates a realistic setting
with patients who cannot move their eyes and are
therefore dependent on covert attention shift based
activation for control. To date, only a small number
of studies successfully implemented such a more
restrictive covert attention P300 approach (Aloise et
al., 2012; Liu et al., 2011; Treder et al., 2011).
We observed increasing decoder accuracy in the
course of the experiment. This suggests that the
increasing amount of training is beneficial for
performance in our BCI paradigm. However, due to
classifier updates performed in the course of the
experiment, the learning process is likely bilateral
and involves both the subjects and the classifier
(Curran and Stokes, 2003). Importantly, when
subjects were free to select the target object, the
decoding success was significantly higher compared
to the instructed selections. This suggests a strong
role for task involvement and the sense of agency in
our paradigm. When subjects performed runs
receiving grasp feedback, most of them achieved
perfect decoding accuracy. We expect the reliability
of the system to be further increased by extending
the stimulation interval (Aloise et al., 2012;
Hoffmann et al., 2008). Note that system reliability
is often more important for the user than a rapid but
error prone detection of intention.
The system presented here is efficient for use
with nearly no training. Most subjects performed
less than ten minutes of training in order to provide
data to the decoding algorithm. This is a very small
effort compared to motor imagery based systems
aiming to control movement in a few degrees of
freedom (Hochberg et al., 2012; Wolpaw and
RoboticGraspInitiationbyGazeIndependentBrain-controlledSelectionofVirtualRealityObjects
9

McFarland, 2004).
In online closed-loop BCI studies the decoding
algorithm has to be fixed before the start of the
actual experiment. We decided to use SVM
classification because this is an established classifier
for high dimensional feature spaces that provides
high and robust generalization by upweighting
informative and downweighting uninformative
features (Cherkassky and Mulier, 1998).
Furthermore, it was shown that linear SVM was
equally accurate for P300 detection compared to
Fisher’s linear discriminant and stepwise linear
discriminant analysis (Krusienski et al., 2006).
Several existing studies make use of extended linear
discriminant analysis algorithms applied to EEG
data (Liu et al., 2011; Treder et al., 2011). However,
because MEG data are based on a much larger
amount of sensors, these approaches are not
applicable in a suitable time.
In order to reduce the burden of controlling a
complex manipulator with many degrees of freedom
by voluntary modulation of brain activity, we
combined a P300 BCI with a grasping system that
autonomously executes the grasp requiring only a
very low input bit rate, namely the command to
grasp an object known to the system. To execute the
grasp intended by the BCI user, we developed an
algorithm for autonomous grasp planning that can
place a reliable grasp on natural objects. The
execution times we achieved were practical for the
proposed task even though not optimal. In this work
we did not focus on timing optimization. However,
improvements to speed up the calculations are in our
focus of future work. The proposed algorithm is
universal in the sense that it is not restricted to a
specific manipulator. Consequently, this algorithm
should also be easily transferable to arbitrary
prosthetic devices suitable for grasping potential
target objects with a force closure grasp.
As input brain signal for the BCI, we used the
MEG. This noninvasive technique measures
magnetic fields of cortical dipoles. While the
dynamic signal characteristics are comparable to
those in EEG, MEG tends to provide higher spatial
resolution (Bradshaw et al., 2001). We are aware
that this modality is not suitable for daily use and
particularly not for use of a prosthetic device. In
fact, we consider our study basic research, and to our
knowledge, this is the first implementation of a
MEG based P300 closed loop BCI.
5 CONCLUSIONS
We showed that noninvasive BCI in combination
with an intelligent actuator can be used in real world
settings to grasp and manipulate objects. This is an
important step towards the development of assistive
systems for severely impaired patients.
ACKNOWLEDGEMENTS
This work has been supported by the EU project
ECHORD number 231143 from the 7th Framework
Programme and by Land-Sachsen-Anhalt Grant
MK48-2009/003.
REFERENCES
Aloise, F., Schettini, F., Aricò, P., Salinari, S., Babiloni,
F., and Cincotti, F. (2012). A comparison of
classification techniques for a gaze-independent P300-
based brain-computer interface. Journal of Neural
Engineering, 9(4), 045012. doi:10.1088/1741-
2560/9/4/045012.
Bianchi, L., Sami, S., Hillebrand, A., Fawcett, I. P.,
Quitadamo, L. R., and Seri, S. (2010). Which
physiological components are more suitable for visual
ERP based brain-computer interface? A preliminary
MEG/EEG study. Brain Topography 23(2), 180-185.
doi:10.1007/s10548-010-0143-0.
Bradshaw, L. A., Wijesinghe, R. S., and Wikswo, Jr, J.
(2001). Spatial filter approach for comparison of the
forward and inverse problems of
electroencephalography and magnetoencephalography.
Annals of Biomedical Engineering, 29(3), 214-226.
doi:10.1114/1.1352641.
Brunner, P., Joshi, S., Briskin, S., Wolpaw, J. R., Bischof,
H., and Schalk, G. (2010). Does the 'P300' speller
depend on eye gaze? Journal of Neural Engineering,
7(5), 056013. doi:10.1088/1741-2560/7/5/056013.
Cherkassky V. and Mulier, F. (1998). Learning from
Data: Concepts, Theory, and Methods. John Wiley &
Sons.
Curran, E. A. and Stokes, M. J. (2003). Learning to
control brain activity: a review of the production and
control of EEG components for driving brain-
computer interface (BCI) systems. Brain and
Cognition, 51(3), 326-336. doi:10.1016/S0278-
2626(03)00036-8.
Ericson, C. (2005). Real-time collision detection.
Amsterdam: Elsevier.
Farwell, L. A. and Donchin, E. (1988). Talking off the top
of your head: toward a mental prosthesis utilizing
event-related brain potentials. Electroencephalography
and Clinical Neurophysiology, 70(6), 510-523.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
10

Frenzel, S., Neubert, E., and Bandt, C. (2011). Two
communication lines in a 3 × 3 matrix speller. Journal
of Neural Engineering, 8(3), 036021.
doi:10.1088/1741-2560/8/3/036021.
Guger, C., Daban, S., Sellers, E., Holzner, C., Krausz, G.,
Carabalona, R., Gramatica, F., and Edlinger, G.
(2009). How many people are able to control a P300-
based brain-computer interface (BCI)? Neuroscience
Letters, 462(1), 94-98.
doi:10.1016/j.neulet.2009.06.045.
Guger, C., Edlinger, G., Harkam, W., Niedermayer, I., and
Pfurtscheller, G. (2003). How many people are able to
operate an EEG-based brain-computer interface
(BCI)? IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 11(2), 145-147.
doi:10.1109/TNSRE.2003.814481.
Hochberg, L. R., Bacher, D., Jarosiewicz, B., Masse, N.
Y., Simeral, J. D., Vogel, J., Haddadin, S., Liu, J.,
Cash, S. S., van der Smagt, P., and Donoghue, J. P.
(2012). Reach and grasp by people with tetraplegia
using a neurally controlled robotic arm. Nature,
485(7398), 372-375. doi:10.1038/nature11076.
Hoffmann, U., Vesin, J.-M., Ebrahimi, T., and Diserens,
K. (2008). An efficient P300-based brain-computer
interface for disabled subjects. Journal of
Neuroscience Methods, 167(1), 115-125.
doi:10.1016/j.jneumeth.2007.03.005.
Khatib, O. (1986). Real-time obstacle avoidance for
manipulators and mobile robots. The International
Journal of Robotics Research, 5(1), 90-98.
Krusienski, D. J., Sellers, E. W., Cabestaing, F., Bayoudh,
S., McFarland, D. J., Vaughan, T. M., & Wolpaw, J.
R. (2006). A comparison of classification techniques
for the P300 speller. Journal of Neural Engineering,
3(4). doi: 10.1088/1741-2560/3/4/007.
Kuzborskij, I., Gijsberts, A., and Caputo, B. (2012).On the
challenge of classifying 52 hand movements from
surface electromyography. Proceedings of the Annual
International Conference of the IEEE Engineering in
Medicine and Biology Society (EMBC).
doi:10.1109/EMBC.2012.6347099.
Liu, Y., Zhou, Z., and Hu, D., (2011). Gaze independent
brain-computer speller with covert visual search tasks.
Clinical Neurophysiology, 6.
doi:10.1016/j.clinph.2010.10.049.
Pfurtscheller, G., Neuper, C., Guger, C., Harkam, W.,
Ramoser, H., Schlögl, A., Obermaier, B., and
Pregenzer, M. (2000). Current trends in Graz
Brain-Computer Interface (BCI) research. IEEE
Transactions on Rehabilitation Engineering, 8(2),
216-219. doi:10.1109/86.847821.
Quandt, F., Reichert, C., Hinrichs, H., Heinze, H. J.,
Knight, R. T., and Rieger, J. W. (2012). Single trial
discrimination of individual finger movements on one
hand: A combined MEG and EEG study. Neuroimage,
59(4), 3316-3324.
doi:10.1016/j.neuroimage.2011.11.053.
Rieger, J. W., Reichert, C., Gegenfurtner, K. R., Noesselt,
T., Braun, C., Heinze, H.-J., Kruse, R., and Hinrichs,
H. (2008). Predicting the recognition of natural scenes
from single trial MEG recordings of brain activity.
Neuroimage, 42(3), 1056-1068.
doi:10.1016/j.neuroimage.2008.06.014.
Sahbani, A., El-Khoury, S., and Bidaud, P. (2012). An
overview of 3D object grasp synthesis algorithms.
Robotics and Autonomous Systems, 60(3), 326-336.
doi:10.1016/j.robot.2011.07.016.
Siciliano, B. and Khatib, O. (2008).
Springer handbook of
robotics. Springer.
Siciliano, B. and Villani, L. (1999). Robot force control.
Boston: Kluwer Academic.
Treder, M. S. and Blankertz, B. (2010). (C)overt attention
and visual speller design in an ERP-based
brain-computer interface. Behavioral Brain Functions,
6, 28. doi:10.1186/1744-9081-6-28.
Treder, M. S., Schmidt, N. M., and Blankertz, B. (2011).
Gaze-independent brain-computer interfaces based on
covert attention and feature attention. Journal of
Neural Engineering, 8(6), 066003. doi:10.1088/1741-
2560/8/6/066003.
Velliste, M., Perel, S., Spalding, M. C., Whitford, A. S.,
and Schwartz, A. B. (2008). Cortical control of a
prosthetic arm for self-feeding. Nature, 453(7198),
1098-1101. doi:10.1038/nature06996.
Vidaurre, C. and Blankertz, B. (2010). Towards a cure for
BCI illiteracy. Brain Topography, 23(2), 194-198.
doi:10.1007/s10548-009-0121-6.
Wolpaw, J. R. (2013). Brain-computer interfaces.
Handbook of Clinical Neurology 110, 67-74.
doi:10.1016/B978-0-444-52901-5.00006-X.
Wolpaw, J. R., Birbaumer, N., Heetderks, W. J.,
McFarland, D. J., Peckham, P. H., Schalk, G.,
Donchin, E., Quatrano, L. A., Robinson, C. J., and
Vaughan, T. M. (2000). Brain-computer interface
technology: a review of the first international meeting.
IEEE Transactions on Rehabilitation Engineering,
8(2), 164-173. doi:10.1109/TRE.2000.847807.
Wolpaw, J. R. and McFarland, D. J. (2004). Control of a
two-dimensional movement signal by a noninvasive
brain-computer interface in humans. Proceedings of
the National Academy of Sciences of the United States
of America, 101(51), 17849-17854.
doi:10.1073/pnas.0403504101.
APPENDIX
In section 2.4 we stated the rasterizing of the object
and gripper surfaces with virtual point poles. Here
we describe the algorithm in more detail.
Our grasp planning algorithm is organized by
simulating the action of forces between target object
and manipulator in consecutive time frames. While
the object poles
are defined as positive, the
manipulator poles
are defined as negative. In
accordance with Khatib (1986), we assume that
opposite poles attract each other while like poles do
RoboticGraspInitiationbyGazeIndependentBrain-controlledSelectionofVirtualRealityObjects
11

not interact. The magnitude of the force between two
poles
and
we calculated as
,
(1)
where
is the distance between the poles,
and the unit of is arbitrary. The exponential
function limits to a maximum of 1 unit. This
avoids infinite forces at collision scenarios and
provides a suitable scaling to instantiate both
propulsive forces between manipulator and object
and repulsive forces to reject manipulator poles that
penetrate the object’s boundary.
The total propulsive force
affecting one
point pole
on the manipulator is calculated from
a set of object point poles
where
∶
∈
∧
⋅
0
(2)
which indicates that only pairwise point poles with
an angle between the surface normal
and
greater than 4
⁄
are involved. We included this
constraint to restrict interactions to opposing surface
force vectors. The force
that moves the
manipulator is then calculated as
∑
,
∈
.
(3)
The manipulator’s effective joint torque can be
calculated by means of the Jacobian generated
from the joint angles and the point poles
(Siciliano and Villani, 1999) by
,
(4)
where external moments are considered
0
. In
order to simulate the manipulator movement, we
calculated the new joint angle
of an axis by
solving the equation system
∆
∆∗
(5)
∆
∆∗
(6)
where is the inertia tensor of the robot’s solid
elements and
defines one of the manipulator
axes. We chose a heuristically dynamic calculation
of the time frame length ∆ which is proportional to
the mean distance between the set of point poles
and
.
Collision detection was performed for the new
posture before a new time frame was assigned to be
valid and the position update was sent to the
manipulator. We used standard techniques (Ericson,
2005) to detect surface intersections. If intersections
were detected, repulsive forces were calculated for
the affected point poles directing to their position of
the last valid time frame and satisfying equation (1).
If no intersections were detected, the robot moved to
the new coordinates. This procedure was repeated
until the force closure condition (Siciliano and
Khatib, 2008) was detected.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
12
