
Increasing Weightlifting Ability of Robotic Manipulators
Sergy Stepura and Joshua Dayan
Technion – Israel Institute of Technology, Mechanical Engineering Faculty Technion City, Haifa 32000, Israel
Keywords: Open Chain Manipulator, Weightlifting, One-hand Snatch, Optimization, Minimal Energy Trajectory,
Calculus of Variation, Genetic Algorithm, Line-Search, Motor Overload.
Abstract: In this position paper we concentrate on one aspect of the robot tasks, its ability to pick up and move heavy
loads, far beyond the manufacturer instructions. Such expansions may apply to other tasks, as well. Three
approaches to improve manipulators weightlifting ability are suggested: mimicking the Olympic
weightlifter’s strategy; weightlifting along the minimal energy trajectory and overloading manipulator's
motors
.
The analytical analysis has been worked out on a simple pendulum. Three optimization methods
were compared: calculus of variation, Genetic algorithm, Line-search. Then, the results were demonstrated
on a model of the Mitsubishi RV-M2 manipulator. Combination of motor overloading with minimal energy
trajectory yielded increase of weightlifting capability 10 times higher than the manufacturer specs.
1 INTRODUCTION
In most cases, industrial robots are made to perform
limited tasks and the operational envelops, as
specified by the manufacturer, are quite narrow and
conservative. This way the mandatory safety is
ensured and the system provides "reasonable" (but
not optimal) and satisfactory performance at all
times. However, in many cases, the operational
envelop may be expanded substantially, without
sacrificing safety, by introducing more sophisticated
control and taking advantage of all DOFs, which are
traditionally incorporated into the basic design, even
if there is no real functional need.
In this paper we concentrate on one aspect of the
robot tasks, i.e., its ability to pick up and move
heavy loads, far beyond the manufacturer
instructions (e.g., Wang et al., 2001). However, such
expansions may apply to speed, manipulation,
tracking, force applying and possibly other tasks, as
well. The maximal allowable payload of most open
chained robotic manipulators ranges between 5% to
20% of the manipulator’s self-weight. Human beings
are able to lift weights greater than their own body
weight. This fact intrigues investigating the
possibility of improving weightlifting ability of
industrial manipulators.
Three approaches to improve manipulators
weightlifting ability are suggested: mimicking the
Olympic weightlifter’s strategy (see Figure 1);
weightlifting along the minimal energy trajectory
and overloading the manipulators' motors.
Figure 1: One-hand Snatch - Applying this technique, the
human body acts similar to an open chain robotic
manipulator (Matheson, 1996, Chen et al., 2009).
To obtain the minimal energy trajectory, three
optimization approaches are suggested: analytical
approach (Euler-Lagrange equation, Calculus of
Variations); adaptive algorithm (Genetic Algorithm)
and gradient based iterative approach (Line-Search).
Among other researchers seeking optimal trajectory
to improve manipulator's weight lifting ability are:
Wang et al., (2001), Saravanan et al., (2007),
Korayem and Nikoobin (2007) and Korayem et al.,
(2008).
Here, we studied a simple pendulum, i.e. a rod
with an electrical motor connected to its upper tip.
All three approaches lead to the same solution:
oscillatory trajectory (swinging motion) increasing
the amplitude up to the weight lifting completion.
There are differences among the three
approaches, in accuracy, ease of constraints
implementation, speed of solution convergence and
485
Stepura S. and Dayan J..
Increasing Weightlifting Ability of Robotic Manipulators.
DOI: 10.5220/0004598404850490
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 485-490
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
selection of initial guess for the manipulator
trajectory. For the latter, and specifically for
industrial manipulators with many DOFs, it is
suggested that the initial guess would be the reversal
of the falling trajectory.
The recommended trajectory is demonstrated by
simulation, using the model of the RV-M2
Movemaster made by Mitsubishi. In contrast to most
of the researches dealing with manipulators
weightlifting ability, the RV-M2 Movemaster is
subject to operational constraints and is unable to
perform free swings (oscillating movements) using
its most powerful joints. Implementation of
techniques for improving weightlifting capabilities
for a manipulator with such limitation indicates that
the suggested techniques are certainly applicable for
a wide range of industrial manipulators, especially
for those that have lesser limitation.
In this paper we show that implementation of any
of the suggested techniques can substantially
improve the weightlifting capabilities of the open
chain robotic manipulator.
2 MIMICKING THE OLYMPIC
WEIGHTLIFTER’S STRATEGY
Olympic weightlifting methods are described in
many Internet sites. Several of them are:
http://tomgorman.moonfruit.com - Describes the
Olympic lifts. Correct performance of the two
classic lifts. Link to other lifts.
http://www.chidlovski.net/liftup - The Lift Up
site is a personal tribute to Olympic weightlifting, to
the Olympic weightlifting history and to its legends.
The site is an author's project and it is a part of
several web-based projects developed
by chidlovski.com.
http://www.exrx.net - Exercise Prescription on
the Net is a free resource for the exercise
professional, coach, or fitness enthusiast.
There are some basic rules for successful
weightlifting that can be obtained from
contemplation on the Olympic weightlifting
methods:
To reduce energy consumption and improve
stability, the weightlifting is performed close to the
lifter center of mass.
The initial momentum obtained by simultaneous
work of all muscles.
Most of the weightlifting is performed by the
strongest muscles (lags and back muscles) while
the hands are used only for the final tuning and
stability control.
In the present work all these rules were
accomplished while performing the weightlifting
along the minimal energy trajectory.
3 WEIGHTLIFTING ALONG
THE MINIMAL ENERGY
TRAJECTORY
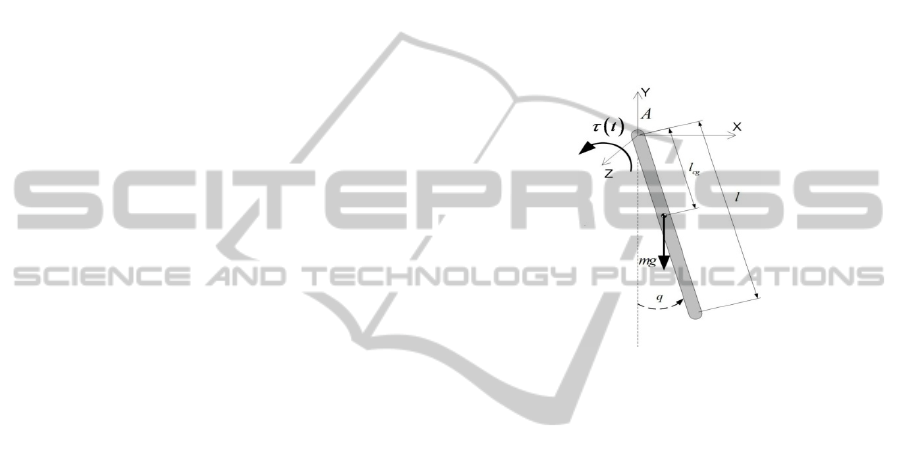
The study was performed on simple pendulum, i.e. a
rod with an electrical motor connected to point
A
(Figure 1).
Figure 2: Scheme of the pendulum with its motor.
Optimization Rule
The trajectory ()qt
that minimizes the functional
E
J
is calculated in the next three equations (see Figure
2). Actually,
()qt
is the trajectory of minimal
energy.
2
0
f
t
E
J
qt qt dt
(1)
Where
f
t
is the lifting time,
qt
is any weight
lifting trajectory and
t
is a torque applied by the
electrical motor:
sin
pcgp
t Iqt cqt lmg qt
(2)
Where
p
I
is the pendulum moment of inertia
(respective to the point A),
c
is a dynamic friction
coefficient,
p
m
is the pendulum gross mass and g is
the gravity and
cg
l
is defined in Figure 2.
The electrical motor energy consumption along
the weightlifting trajectory is defined as:
2
0
{ }{(()) }
f
t
Eq t t
I
tRdt
(3)
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
486
Where
It
is the electrical current along the
weightlifting trajectory and
R
t
is the electrical
resistance of the motor.
For most electrical motors installed in robotic
manipulators the electrical resistance is almost
constant and the electrical current is proportional to
the torque. Thus, the value of the functional
{()}
E
J
qt
is proportional to {()}Eqt
, the energy
consumption of the electrical motor along the
weightlifting trajectory.
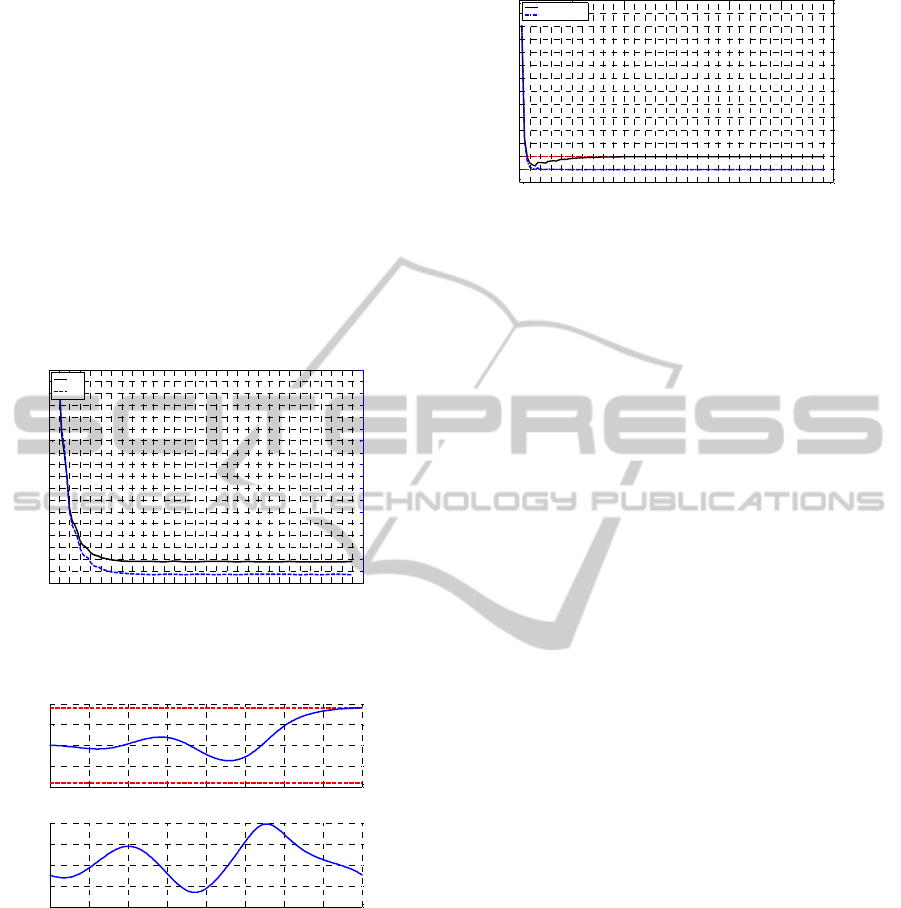
Here, we verified that minimizing functional
E
J
also minimizes the maximal torque along the
weightlifting trajectory (Figures 3 and 4).
Figure 3: Value of the
E
J
functional and the maximal
torque
max
vs. lifting time
f
t
.
Figure 4: Minimal energy trajectory
qt and control
torque
t
corresponding to lifting time
4
f
ts
.
It is intuitively clear and can be calculated as well,
that there is a lower bound for the energy
consumption during weight lifting along minimal
energy trajectories. However, it was found that there
is an upper bound, as well (see Figure 5). This is
correct if there is no coulomb friction in the joints,
which obviously, is not always true.
Figure 5: Minimal energy for pendulum lifting
with and without friction vs. Lifting Time
f
t
.
Then, it can be concluded that if there is no demand
for fast weightlifting (lifting within a specified
interval of time) the energy consumption along the
minimal energy trajectory is bounded as follows:
min
2
g
g
UE U
(4)
where,
g
U
is the potential energy gained by the
lift.
4 DETERMINING
THE PREFERRED
OPTIMIZATION METHOD
Three optimization methods were compared in the
present study:
Calculus of Variations (CoV) – Analytical
method finding the boundary value problem who's
solution minimizes the functional; this method is
the most accurate of all three and can be used as a
reference for the comparison.
Genetic Algorithm (GA) – Optimization method
that mimics the process of "natural evolution"
(adaptive method).
Line-Search (LS) – Optimization based on
gradient method.
All three methods compared for accuracy and
calculation time. Table 1 summarizes the study
findings. For the comparison all parameters were
graded from 1 to 3, where 3 is the best result and 1 is
the worst.
Line-Search method is chosen for calculating the
minimal energy trajectory for the RV-M2
manipulator. The main reason for that choice is that
Line-Search yields the shortest calculation time,
while differences in accuracy for all three methods
are relatively small.
Line-Search method is chosen for calculating the
minimal energy trajectory for the RV-M2
0 5 10 15 20 25 30
10
12
14
16
18
20
22
24
26
28
J
E
[(N
.
m)
2.
sec]
t
f
[s]
0 5 10 15 20 25 30
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8
max
[N
.
m]
J
E
max
0 0.5 1 1.5 2 2.5 3 3.5 4
-200
-100
0
100
200
q [deg]
0 0.5 1 1.5 2 2.5 3 3.5 4
-4
-2
0
2
4
[N
.
m]
t
[s]
0 5 10 15 20 25 30
0
20
40
60
80
100
120
140
t
f
[s]
E
min
[J]
With Friction
Without Friction
IncreasingWeightliftingAbilityofRoboticManipulators
487

Table 1: Comparison of optimization methods.
Method Accuracy
Calc.
Time
Restrictions/
requirements
CoV
3 2 A: See below
GA
1 1
B: None
LS
2 3 C: See below
(Table 1 Continued): Restrictions/requirements
A: The weightlifting trajectories must be smooth functions.
B: None
C: Small change in the weightlifting trajectory causes only a
small change in the cost function.
manipulator. The main reason for that choice is that
Line-Search yields the shortest calculation time,
while differences in accuracy for all three methods
are relatively small.
However, Line-Search method is extremely
sensitive to initial conditions. Initial guess should be
close to the final solution (minimal energy
trajectory), especially when the functional has
multiple local minimums. Reversal of the free-fall
trajectory is suggested to be used as the initial guess.
In Figure 6 the Reversed Falling Trajectory (RFT)
and the minimal energy trajectory calculated by the
CoV method are compared. It can be seen that the
reversal of the falling trajectory is very close to the
minimum energy solution as obtained by the CoV
method (considered the most accurate method).
Figure 6: Comparison of
qt
and
max
calculated by
using CoV and Reversed Falling Trajectory (RFT).
5 MANIPULATOR MOTORS
OVERLOADING
The third method of improving the weightlifting
capacities of the robot is overloading the
manipulator motors. Inasmuch as that the
manipulator’s manufacturer (Mitsubishi) does not
provide information on the motors overloading
abilities, specifications of the National Electrical
Manufacturers Association (NEMA) were checked.
According to NEMA the Service Factor defines the
overload ability of the motor; as if it does not cause
immediate damage to the motor, but only reduces its
service life. A common value for the Service Factor
of the electrical motors is between 1.15 and 1.5. (See
also: Cowern, 2004, and Faulhaber Group Internet
publication)
Usually, the electrical motors can sustain more
than the Service Factor overload, but only for
limited time. Not having information on the motors
overloading capabilities the following assumptions
were made for the maximal overload period and the
minimal cooling time between overloads:
The maximal overload period is one (1) second
The minimal cooling time between the overloads is
one (1) second
With the above assumptions of maximal overload
period and minimal cooling time, it was found that
substantial improvement of the weightlifting
capabilities of the open chain robotic manipulator is
possible by such motor overloading (see Table 2). In
addition, it was obtained that for the RV-M2
manipulator the overload remains within the
conventional Service Factor of 1.45.
Table 2: Comparison of improving weightlifting
capabilities techniques.
Technique
Payload weight
[kg]
Payload
weight
[%]
Notes
Manufacturer
Spec.*
1.6 5.7% A
Weightlifter’s
strategy
10 35% B
Minimal energy
trajectory
10 35%
45% Motors
overloading +
Minimal energy
trajectory**
15 53% C
A: The manipulator weight is 28 kg
B: The technique applied when the weightlifting is performed along the
minimal energy trajectory.
C: Satisfy the assumed constraints on maximal overload period and
minimal cooling time.
6 DEMONSTRATING
THE IMPROVEMENT
OF THE WEIGHTLIFTING
CAPABILITIES FOR THE
MITSUBISHI RV-M2
In contrast to most of the works dealing with
manipulators weightlifting ability (Wang et al.,
0 5 10 15 20 25
-20 0
-10 0
0
100
200
q [d e g ]
CoV
RFT
0 5 10 15 20 25
-4
-2
0
2
4
6
[N
.
m]
t
[s]
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
488
2001), (Saravanan et al., 2007), (Korayem and
Nikoobin 2007); (Korayem et al., 2008), the RV-M2
Movemaster, selected for the demonstration in this
research, has mechanical limitations on most of its
powerful joint’s (Figure 7) and is unable to perform
free swings (or, oscillating movements) with these
joints. However, implementation of the techniques
for improving weightlifting capabilities for
manipulator with such limitations provides a
stronger approval that the suggested techniques are
applicable for wide range of industrial manipulators,
especially for those that have fewer limitations.
Figure 7: Mitsubishi RV-M2 Movemaster manipulator –
Operation space
The dynamic model of Mitsubishi RV-M2 has been
constructed and simulated by Matlab for
demonstrating the improvement of the weightlifting
capabilities.
Figure 8: RV-M2 manipulator dynamic model and
visualization.
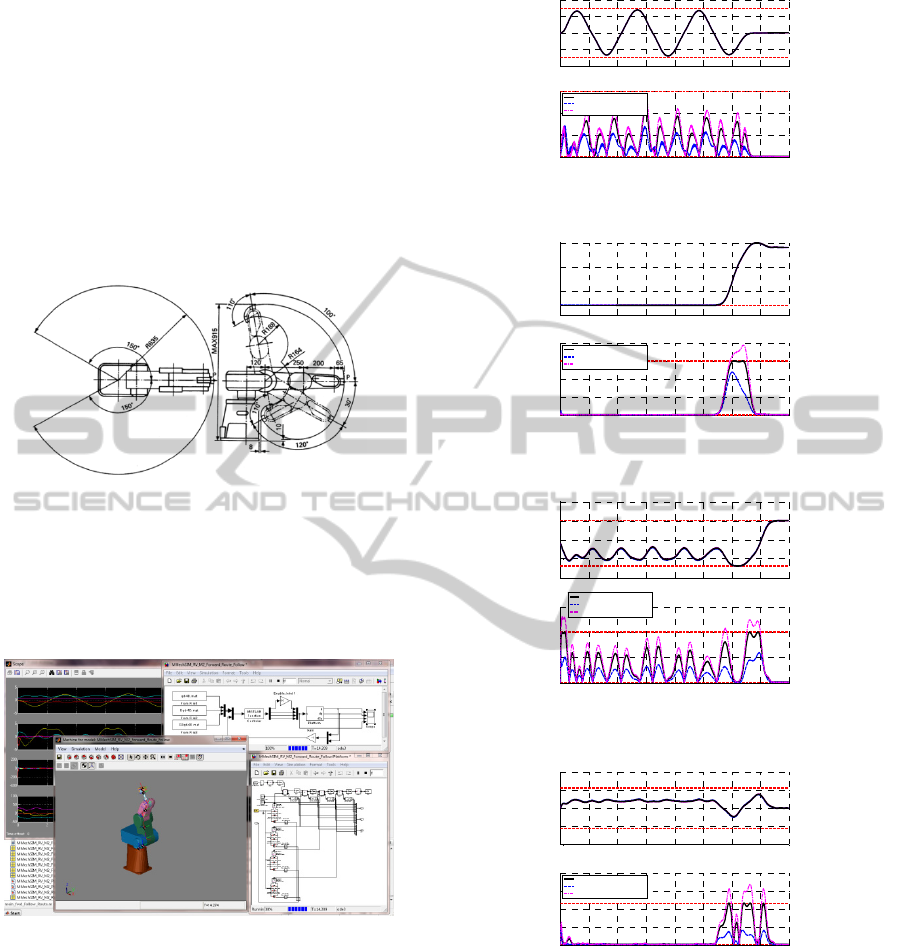
For the demonstration of these capabilities
improvement all three techniques were applied to the
dynamic model described in Figure 8. To
demonstrate the robustness of the suggested
techniques the weight lifting was simulated with
0, 10 and 15 kg payloads; maximal payload without
overloading the motors was calculated for 10 kg,
while the 15 kg payload required the motors
overloading (Figures 9, 10, 11 and 12 for the
different joints). Animation demonstrating the
simulation results is also available for all four joints.
Figure 9: RV-M2 Joint #1 (Waist Joint).
Figure 10: RV-M2 Joint #2 (Shoulder Joint).
Figure 11: RV-M2 Joint #3 (Elbow Joint).
Figure 12: RV-M2 Joint #4 (Wrist Pitch Joint).
7 CONCLUSIONS
All three approaches suggested improving
manipulators weightlifting ability, i.e., mimicking
the Olympic weightlifter’s strategy, weightlifting
along the minimal energy trajectory and overloading
the manipulators' motors, were shown to bring
substantial improvement in the weightlifting
0 2 4 6 8 10 12 14 16
-200
-100
0
100
200
q
1
[deg]
0 2 4 6 8 10 12 14 16
0
20
40
60
P
1
[W ]
t
[s]
Calculation for PayLoad = 10 [kg]
Simulation for PayLoad = 0 [kg]
Simulation for PayLoad = 15 [kg]
0 2 4 6 8 10 12 14 16
-50
0
50
100
q
2
[deg]
0 2 4 6 8 10 12 14 16
0
20
40
60
80
P
2
[W ]
t
[s]
Calculation for PayLoad = 10 [kg]
Simulation for PayLoad = 0 [kg]
Simulation for PayLoad = 15 [kg]
0 2 4 6 8 10 12 14 16
-150
-100
-50
0
50
q
3
[deg]
0 2 4 6 8 10 12 14 16
0
20
40
60
P
3
[W ]
t
[s]
Calculation for PayLoad = 10 [kg]
Simulation for PayLoad = 0 [kg]
Simulation for PayLoad = 15 [kg]
0 2 4 6 8 10 12 14 16
-200
-100
0
100
200
q
4
[deg ]
0 2 4 6 8 10 12 14 16
0
10
20
30
40
P
4
[W ]
t
[s]
Calculation for PayLoad = 10 [kg]
Simulation for PayLoad = 0 [kg]
Simulation for PayLoad = 15 [kg]
IncreasingWeightliftingAbilityofRoboticManipulators
489

capabilities of the open chain robotic manipulator.
Just applying weightlifting strategy or, minimum
energy trajectory, increases the robot ability to pick
up load, which is seven times heavier than that
specified by the manufacturer. Allowing tolerable
overload of the motors raises the payload 10 folds.
The suggested techniques are applicable for wide
range of industrial manipulators, even those with
motion constraints.
REFERENCES
Chen Shen-Kai , Lu Cheng-Chang , Chou Pei-His , Guo
Lan-Yuen and Wu Wen-Lan , “Patellar tendon
ruptures in weight lifters after local steroid injections”,
Archives of Orthopaedic and Trauma Surgery (2009),
Volume 129, Number 3, pp. 369–372, March 2009.
Cowern, Ed. “Understanding Induction Motor Nameplate
Information”, http://ecmweb.com, May 2004.
Korayem M. H. and A. Nikoobin, “Maximum payload for
flexible joint manipulators in point-to-point task using
optimal control approach”, Int J Adv Manuf Technol
(2008), vol. 38, pp 1045–1060, July 2007
Korayem, M. H., A. Nikoobin and V. Azimirad,
“Maximum load carrying capacity of mobile
manipulators: optimal control approach”, Robotica
(2009), vol. 27, pp. 147–159, April 2008.
Matheson, N. “Relationships among age, body weight,
resting heart rate, and performance in a new test of
lift capacity”, Journal of Occupational Rehabilitation
(1996), Volume 6, Number 4,pp. 225–237 , December
1996.
Saravanan, R., S. Ramabalan and C. Balamurugan,
“Evolutionary optimal trajectory planning for
industrial robot with payload constraints”, Int J Adv
Manuf Technol (2008), vol. 38, pp 1213–1226,
September 2007.
Wang Chia-Yu E., Timoszyk Wojciech K. and Bobrow
James, E. “Payload Maximization for Open Chained
Manipulators: Finding Weightlifting Motions for a
Puma 762 Robot”, IEEE Transaction on Robotics and
Automation, vol. 17, no 2, pp 218-224, April 2001.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
490
