
Markerless Augmented Reality based on Local Binary Pattern
Youssef Hbali, Mohammed Sadgal and Abdelaziz EL Fazziki
Faculty of Sciences SEMLALIA, Cadi Ayyad University, Prince Moulay Abdellah Avenue, Marrakech, Morocco
Keywords:
Local Binary Pattern, Augmented Reality, Machine Learning, Face Detection, Eyes Detection.
Abstract:
Augmented reality is becoming the future of e-commerce, throw their mobile devices, customers have access
to all kind of information, going from weather, news papers, shops and so on. Today’s mobiles devices are
so powerful to the point that they can be used as a platform of virtual try-on systems. Over this paper we
present a virtual eye glasses try-on system based on augmented reality and LBP for face and eyes detection.
The well-known machine learning Ada Boost algorithm is used for real time eyes tracking, the resulting face
and eyes positions are continuously utilized to overlay the glasses model over the face. The system helps
evaluating glasses before trying them in the store and makes possible the design of its own style.
1 INTRODUCTION
Object detection is a fundamental part of many virtual
try-on systems. A flexible eye glasses try-on system
which can be executed on mobile devices requires an
efficient and robust face and eyes detection. Object
detectors techniques can be divided into two main
categories (Hjelmsa and Lowb, 2001) : feature-based
approach where human knowledge is used to extract
explicit object features such as nose, mouth, and
ears for a face detection. The second approach is
the image-based approach, in this approach, the
object detection problem is treated as binary pattern
recognition problem to distinguish between face and
non-face images, eye and non-eye images, etc. This
approach is a holistic approach that uses machine
learning to capture unique and implicit object fea-
tures. Based on the classification strategy used in the
design process, image-based approach is categorized
into two subcategories: appearance-based approach
and boosting-based approach.
Appearance-based approach category is considered
as any image-based approach face detector that does
not employ the boosting classification methods in
it classification stage. However, other classification
schemes are used such as neural networks (Rowley
et al., 1998) (Roth et al., 2000), Support Vector
Machines (SVM) (Osuna et al., ), Bayesian classifiers
(Cootesa et al., 2002) (Jin et al., 2004), and so forth.
All techniques in the appearance-based approach
lack the ability to perform in real-time, and it takes
an order of seconds to process an image.
The other image-based approach subcategory is
the boosting-based approach, this approach started af-
ter the successful work of Viola and Jones (Viola and
Jones, 2001) where high detection rate and high speed
of processing (15 frames/second)using the Ada Boost
(Adaptive Boosting) algorithm (Freund and Schapire,
1996) and cascade of classifiers were used. Boosting-
based approach is considered as any image-based ap-
proach that uses the boosting algorithm in the classi-
fication stage.
Augmented reality is a term for a live direct
or indirect view of a physical, real world environ-
ment whose elements are augmented by computer-
generated sensory input, such as sound or graphics
(Lu et al., 1999) (Shen et al., 2010). Augmentation
is conventionally in real-time, so is the need for a ro-
bust eyes detection system that is capable of process-
ing image rapidly and detecting eyes accurately in an
arbitrary face image with invariance to pose, scale and
lighting.
2 LOCAL BINARY PATTERN
The local binary pattern (LBP) is defined as a gray-
scale invariant texture measure, derived from a gen-
eral definition of texture in a local neighborhood. The
original LBP operator labels the pixels of an image by
thresholding the 3-by-3 neighborhood of each pixel
with the center pixel value and considering the result
as a binary number. The decimal result is the sum of,
137
Hbali Y., Sadgal M. and EL Fazziki A..
Markerless Augmented Reality based on Local Binary Pattern.
DOI: 10.5220/0004531201370141
In Proceedings of the 10th International Conference on Signal Processing and Multimedia Applications and 10th International Conference on Wireless
Information Networks and Systems (SIGMAP-2013), pages 137-141
ISBN: 978-989-8565-74-7
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
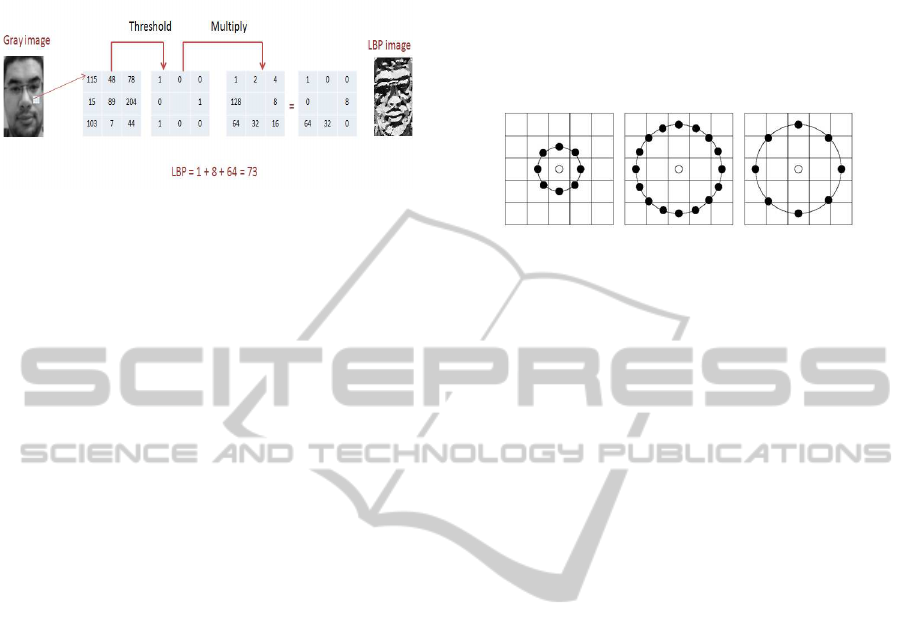
the thresholds multiplied by their weights values, as it
can be seen in Fig 1.
Figure 1: LBP Calculation.
In other words given a pixel position (x
c
, y
c
), LBP
is defined as an ordered set of binary comparisons of
pixels intensities between the central pixel and its sur-
rounding pixels. The resulting label value of the 8-bit
word can be expressed as follows :
LBP(x
c
, y
c
) =
7
∑
n=0
t(l
n
− l
c
)2
n
. (1)
where l
c
corresponds to the gray value of the cen-
tral pixel, l
c
the gray value of the neighbor pixel n,
and function t(k) is defined as following :
t(k) =
1, for k ≥ 0 (2)
0, for k < 0 (3)
According to (2), the LBP code is invariant to mono-
tonic gray-scale transformations, hense the LBP rep-
resentation may be less sensitive to illumination
changes.
The 256-bin histogram of the labels computed over
an image can be used as texture descriptor. Each bin
of histogram (LBP code) can be regarded as micro-
texton and the histogram characterizes occurrence
statistics of simple texture primitive.
The histogram of the labeled image f
l
(x, y) can be de-
fined as:
H
i
=
∑
x,y
I(f
l
(x, y) = i), i = 0, .., L− 1. (4)
where L is the number of different labels produced
by the LBP operator and l(A) is 1 if A true and 0 oth-
erwise.
2.1 Multi-scale LBP
The LBP operator has been extended to consider dif-
ferent neighborhood sizes to deal with various scales
(Ojala et al., 2002). The local neighborhood of the
LBP operator is defined as set of sampling points
equally spaced on a circle of radius R centered on the
pixel to be labeled. These sampling points which do
not fall exactly on the pixels are expressed using bilin-
ear interpolation, therefore allowing any radius value
and any number of points in the neighborhood. Fig. 3
shows different LBP neighborhoods.
The notation LBP
P,R
denotes the neighborhood of P
sampling points on a circle of radius R.
Figure 2: LBP operator examples : circular(8,1),(16,2) and
(8,2).
2.2 Uniform Patterns
LBP
P,R
produces 2
P
different binary patterns that can
be formed by the P pixels in the neighbor set. Ojala
et al. (Ojala et al., 2002) have noticed that most of the
texture information was contained in a small subset of
LBP patterns. Therefore, it is possible to use only a
subset of the 2
P
LBPs to describe the textured images.
They defined these fundamental patterns as those with
at most 2 bitwise transitions from 0 to 1 or vice versa.
For example, 00000000 and 11111111 contain 0 tran-
sition while 0110000 and 01111110 contain 2 transi-
tions and so on. In the computation of the LBP labels,
uniform patterns are used so that there is a separate la-
bel for each uniform pattern and all the non-uniform
patterns are labeled with a single label. For example,
when using (8,R) neighborhood, there are a total of
256 patterns, 58 of which are uniform, which yields
in 59 different labels.
3 LBP FACE FACIAL
REPRESENTATION
Face image can be decomposed Hadid et al. (Hadid
et al., 2004) introduced a face representation based
on LBP for face recognition. To consider the shape
information of faces, face images are divided into M
small non-overlappingregions R
0
,R
1
,...,R
M
(as shown
in Fig. 4). The LBP histograms extracted from each
sub-region are then concatenated into a single, spa-
tially enhanced feature histogram defined as :
H
i, j
=
∑
x,y
l( f
l
(x, y) = i)l((x, y) ∈ R
j
) (5)
where i=,..L-1, j=0,..M-1. The extracted feature
histogram describes the local texture and global shape
of face images.
SIGMAP2013-InternationalConferenceonSignalProcessingandMultimediaApplications
138
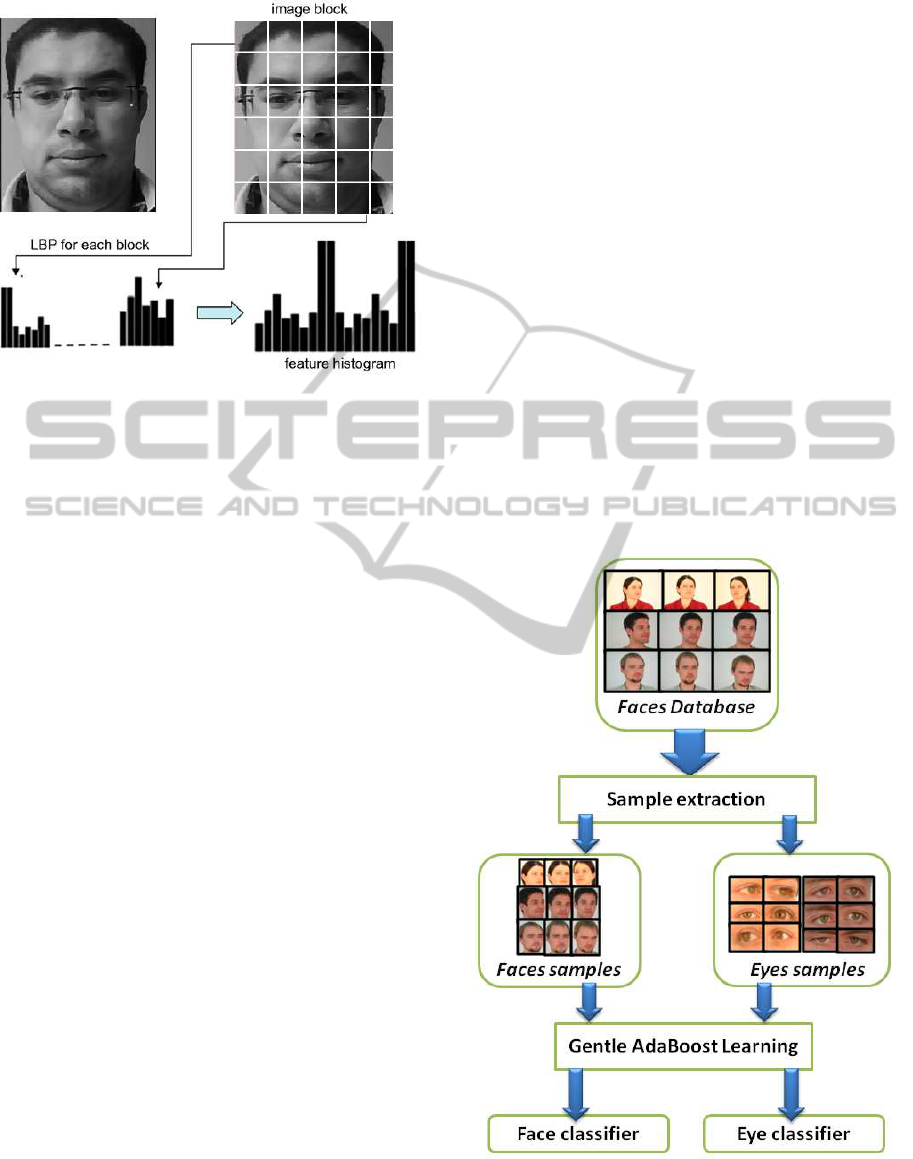
Figure 3: A face image is divided into sub-regions from
which LBP histograms are extracted and concatenated into
a single, spatially enhanced feature histogram.
4 AUGMENTED REALITY
Augmented Reality (AR) employs computer vision,
image processing and computer graphics techniques
to merge digital content into the real world. It enables
real- time interaction between the user, real objects
and virtual objects. AR can, for example, be used to
embed 3D graphics into a video in such a way as if the
virtual elements were part of the real environment.
Model-based tracking approaches(Reitmayr and
Drummond, 2006) appear to be the most promising
among the standard vision techniques currently ap-
plied in AR applications. While marker-based ap-
proaches such as ARToolkit(Kato and Billinghurst,
1999) or commercial tracking systems such as ART
provide a robust and stable solution for controlled en-
vironments, it is not feasible to equip a larger outdoor
space with fiducial markers. Hence, any such system
has to rely on models of natural features such as ar-
chitectural lines or feature points extracted from ref-
erence images.
For facial accessory products like eye glasses, it
appears embarrassing to place such markers in front
of the user who is trying on the glasses. Marker-
less AR systems use natural features instead of fidu-
cial markers in order to perform tracking. Therefore,
there are no ambient intrusive markers that are not re-
ally part of the world. Furthermore, markerless AR
counts on specialized and robust trackers.
The first step of building the learning-based track-
ing system is to produce training data. For the pro-
posed system we used two face databases, Bioid and
CIE. From these different images we extract facial
models under different rotations and both the left an
right eyes. Then by applying a boosting (Friedman
et al., 2000) classification we produce two classifier,
one for faces, the other for eyes. In this system, a vari-
ant of Ada Boost, Gentle Ada Boost is used to select
the feature and to train the classifier. The formal guar-
antees provided by the Ada Boost learning procedure
are quite strong. It has been proved in (Freund and
Schapire, 1996) approaches zero exponentially in the
number of rounds. Gentle AdaBoost takes a newton
steps for optimization.
The weak classifier is designed to select the single
LBP histogram bin which best separates the positive
and negative examples. Similar to (Viola and Jones,
2001), a weak classifier h
j
(x) consists of a feature f
j
which corresponds to each LBP bin, a threshold θ
j
and a parity p
j
indicating the direction of the inequal-
ity sign:
h
j
(k) =
1 if p
j
f
j
(x) ≤ p
j
θ
j
(6)
0 otherwise (7)
The boosted classifier is a combination of weights and
weak classifiers.
Figure 4: Off-line learning stage.
MarkerlessAugmentedRealitybasedonLocalBinaryPattern
139
5 EXPERIMENTAL RESULTS
In this section, we will measure the performance
of the different classifier over Bioid database. The
dataset of the Bioid database consists of 1521 gray
level images with a resolution of 384x286 pixel. Each
one shows the frontal view of a face of one out of 23
different test persons. For comparison reasons the set
also contains manually set eye positions. The classi-
fier takes a collection of marked up test images, ap-
plies the classifier and output the performance, i.e.
number of found objects, number of missed objects
and the number false alarms which are defined as fol-
lowing :
• Hits : the number of correctly found objects.
• Missed : the number of missed objects (must exist
but are not found, also known as false negatives).
• False alarms : the number false alarms (must not
exist but are found, also known as false positives).
The performance of the classifiers will be illus-
trated by the receiver operating characteristic (Laskoa
et al., 2005) cuves which are frequently used in
biomedical informatics research to evaluate classifi-
cation and prediction models for decision support, di-
agnosis, and prognosis. ROC analysis investigates the
accuracy of a model’s ability to separate positive from
negative cases (such as predicting the presence or ab-
sence of disease), and the results are independent of
the prevalence of positive cases in the study popula-
tion. It is especially useful in evaluating predictive
models or other tests that produce output values over
a continuous range, since it captures the trade-off be-
tween sensitivity and specificity over that range.
5.1 Test Performance for the Face
Classifiers
For tests performance, we will compare the trained
LBP classifiers to Haar feature classifiers, We apply
both face classifiers on the Bioid database, the results
are shown in the table 1.
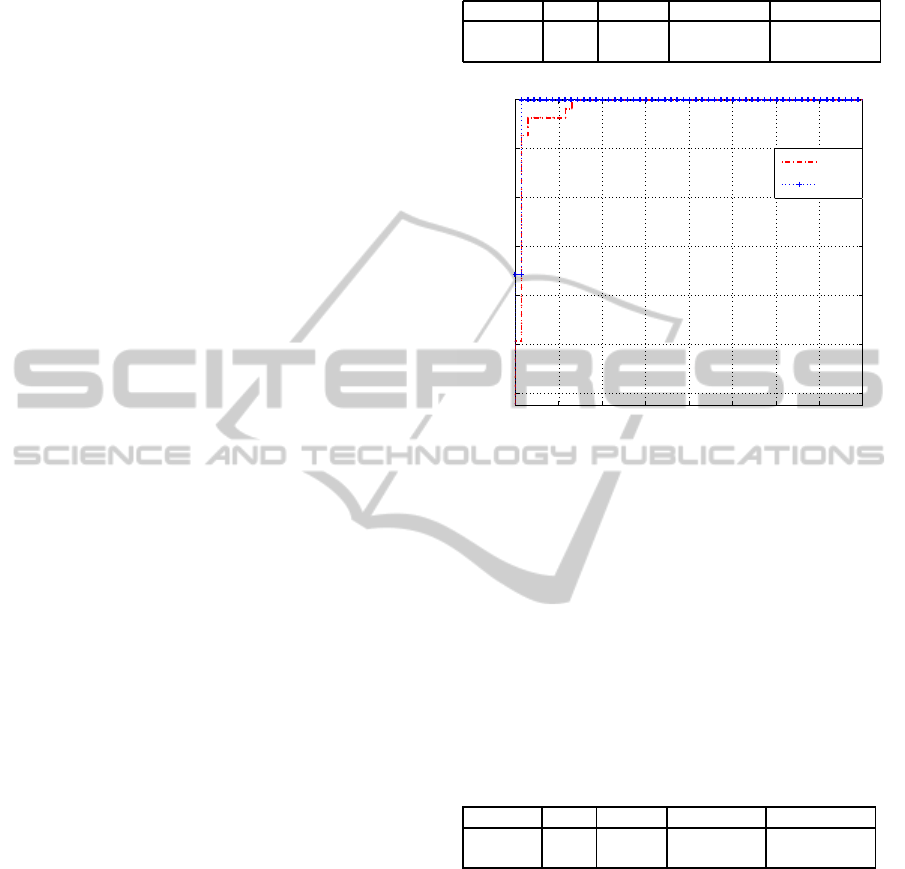
Figure 5 gives the ROC curves comparing the per-
formance of the two faces classifiers. It shows that
there is little difference between the two classifiers in
terms of accuracy.
Table 1 shows that LBP is much fast than the Haar
classifier. The number of hits faces of LBP detector is
higher than Haar detector and false alarms detected by
Haar detector is considerable compared to the number
of false alarms detected by the LBP detector.
Table 1: LBP and Haar faces classifiers performance evalu-
ation and comparison.
Features Hits Missed False alarm Total time
LBP 1392 129 28 6.34 seconds
Haar 1377 144 547 157 seconds
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
0.94
0.95
0.96
0.97
0.98
0.99
1
False acceptance rate
Detection rate
Haar
LBP
Figure 5: Roc curve of the LBP and Haar face classifier
applied on the Bioid database.
5.2 Test Performance for the Eyes
Classifiers
Table 2 shows the results of applying the eyes classi-
fiers on the Bioid dataset.
It clearly appears the LBP eyes classifier gets down
in terms of accuracy, however its shows that the LBP
detector response time still more interesting than Haar
detector response time.
Table 2: LBP and Haar eyes classifiers performance evalu-
ation and comparison.
Features Hits Missed False alarm Total time
LBP 966 555 1993 43.6 seconds
Haar 1986 1056 630 73 seconds
6 PROPOSED ARCHITECTURE
For the augmented reality part, we apply the face clas-
sifier to first detect the face, see the figure 6.a . From
this detected face we use the region of interest marked
by the rectangle withing the face, see the figure 6.b,
to look for eyes. Then, applying the eyes classifier
to the region of interest leads to detect eyes withing
the given image with better accuracy and better time
response.
Finally, our system uses ARtoolkit to overlay a
VRML (Virtual Reality Modeling Language) model
SIGMAP2013-InternationalConferenceonSignalProcessingandMultimediaApplications
140

glasses on the image. Giving the user the ability to
test many glasses without putting any kind of markers
on his face.
Figure 6: a) - Frame image rendered by the webcam, b) -
The detected face and eyes region of interest, c) The de-
tected eyes, d) The glasses model overlayed on the detected
eyes.
7 CONCLUSIONS
In this paper,we introduced and implemented marker-
less augmented reality based on local binary patterns
for eyes and face detection. The LBP features have
proved accuracy on face detection, for small region
like eyes, the LBP still need more improvements.
Due to the computational simplicity and speed of
the LBP, virtual try-on systems can easily be imple-
mented on mobile devices. This approach can im-
provehighly the electronic commerce and will change
the customers shopping habits.
REFERENCES
Cootesa, T., Wheelera, G., Walkerb, K., and Taylora, C.
(2002). View-based active appearance models. Image
and Vision Computing, 20(9-10):657664.
Freund, Y. and Schapire, R. E. (1996). Experiments with a
new boosting algorithm. Proceedings of International
Conference on Machine Learning, page 148156.
Friedman, J., Hastie, T., and Tibshirani, R. (2000). Addi-
tive logistic regression: a statistical view of boosting.
Annals of statistics, 28(2):337–407.
Hadid, A., Pietikainen, M., and Ahonen, T. (2004). A
discriminative feature space for detecting and recog-
nizing faces. Computer Vision and Pattern Recogni-
tion, 2004. CVPR 2004. Proceedings of the 2004 IEEE
Computer Society Conference on, 2:797–804.
Hjelmsa, E. and Lowb, B. K. (2001). Face detection: A
survey. Computer Vision and Image Understanding,
3(83):236274.
Jin, H., Liu, Q., Lu, H., and Tong, X. (2004). Face detec-
tion using improved lbp under bayesian framework.
Multi-Agent Security and Survivability, 2004 IEEE
First Symposium on, pages 306–309.
Kato, H. and Billinghurst, M. (1999). Marker tracking and
hmd cal-ibration for a video-based augmented real-
ity conferenencing system. Augmented Reality, 1999.
(IWAR ’99) Proceedings. 2nd IEEE and ACM Inter-
national Workshop on, pages 85–94.
Laskoa, T., Bhagwatc, J., Kelly, H., and Ohno-Machado, L.
(2005). The use of receiver operating characteristic
curves in biomedical informatics. Journal of Biomed-
ical Informatics, 38(5):404–415.
Lu, S., Shpitalni, M., and Gadh, R. (1999). Virtual and aug-
mented reality technologies for product realization.
CIRP Annals - Manufacturing Technology, 2(2):471–
495.
Ojala, T., Pietikainen, M., and Maenpaa, T. (2002). Mul-
tiresolution gray-scale and rotation invariant tex-
ture classification with local binary patterns. IEEE
Trans, Pattern Analysis and Machine Intelligence,
24(7):971–987.
Osuna, E., Freund, R., and Girosit, F. Training support vec-
tor machines: an application to face detection. Com-
puter Vision and Pattern Recognition, 1997. Proceed-
ings IEEE Computer Society Conference on, pages
130–136.
Reitmayr, G. and Drummond, T. (2006). Going out: robust
model-based tracking for outdoor augmented reality.
Mixed and Augmented Reality, 2006. ISMAR 2006.
IEEE/ACM International Symposium on, pages 109–
118.
Roth, D., Yang, M., and Ahuja, N. (2000). A snow-based
face detector. Advances in Neural Information Pro-
cessing Systems, pages 855–861.
Rowley, H. A., Baluja, S., and Kanade, T. (1998). Neu-
ral network-based face detection. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
20(1):23–38.
Shen, Y., Ong, S., and Nee, A. (2010). Augmented real-
ity for collaborative product design and development.
Design Studies, 31(2):118–145.
Viola, P. and Jones, M. (2001). Rapid object detecting
using boosted cascade of simple features. in Proc.
IEEE Conf. Computer Vision and Pattern Recognition,
1:511–518.
MarkerlessAugmentedRealitybasedonLocalBinaryPattern
141
