
Traffic Sign Detection on GPU
using Color Shape Regular Expressions
Artem Nikonorov
1
, Maksim Petrov
2
and Pavel Yakimov
2
1
Image Processing Systems Institute of Russian Academy of Science,
Molodogvardeyskaya st. 151, 443001, Samara, Russia
2
Samara State Aerospace University,
Moskovskoe shosse, 34, 443086 Samara, Russia
Abstract. Regular expression matching on GPU is state-of-the-art technique for
the processing of a huge amount of the text information, for example, in
network activity analyzers and intrusion prevention systems. This paper
proposes a fast and robust algorithm for traffic sign detection, which is based on
color shape regular expressions matching through the image pixels. We
consider a fast massively-parallel GPU implementation of the color shape
regular expression, using deterministic finite automaton and special case of
non-deterministic finite automaton. The performance of the proposed
localization algorithm is compared with the Hough transform, which is
commonly used for traffic sign recognition.
1 Introduction
This paper is devoted to the problem of traffic sign recognition, which becomes more
and more acute. The number of cars in the world is constantly increasing as well as
the number of road accidents. Therefore, closer attention is paid to the road system of
intelligent information processing and decision making. Engineers around the world
have developed a number of active safety systems for cars, such as ABS (anti-lock
braking system), EBD (electronic brake force distribution), ESP (electronic stability
control), and many others. Among such systems, traffic sign recognition system
(TSR) is considered to be one of the most advanced.
The traffic sign recognition system is designed to provide the driver with actual
information about the traffic conditions. There are several examples of such system:
Opel Eye’, ‘Speed Limit Assist’ by Mercedes-Benz, ‘Traffic Sign Recognition’ by
Ford, etc. Most of them aim to detect and recognize only speed limit traffic signs,
these restrictions apply to the algorithms of traffic sign detection because of several
reasons [1].
The task of traffic signs recognition is computationally complex, and the performance
of recent mobile computers is not always enough to provide real-time traffic signs
recognition. Moreover, most of such recognition techniques are based on Hough
transform, which allows detecting parameterized curves in the image. This method is
Nikonorov A., Petrov M. and Yakimov P..
Traffic Sign Detection on GPU using Color Shape Regular Expressions.
DOI: 10.5220/0004393900630072
In Proceedings of the 4th International Workshop on Image Mining. Theory and Applications (IMTA-4-2013), pages 63-72
ISBN: 978-989-8565-50-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

suitable when searching for circular traffic signs, but the detection of triangular traffic
signs using Hough transform causes a certain problem.
The traffic sign recognition usually consists of two main steps: the detection of
signs and then the recognition of the identified object. There are a lot of different
recognition techniques, and it is actually not problematic to recognize the detected
object of a small size, having samples or templates of possible traffic signs. In this
paper, we will introduce our new method of detection traffic signs, which is based on
the use of regular expressions.
2 Traffic Sign Detection
There are several methods to detect a traffic sign in the image, and one the most
common is the technique that uses the sign color information. The color feature
makes it possible to distinguish the sign from other surrounding road conditions. The
first step of traffic sign recognition can be implemented on the basis of color
information [6] It is necessary to mention that the first papers about the recognition of
traffic signs appeared in the 1960s; the first working software solutions emerged in
the 1990s [7].
In many studies, some restrictions on the? RGB component of images are used to
detect the signs in the background of some road conditions, similar to those in [6]:
/
/
/
red
red
red
rg
rb
gb
.
(1)
In particular, the color filtering in the RGB space is used in [8] to detect speed
limit signs. In some works, HSI space or HSB are considered more suitable for
recognition tasks [6], [9].
The approach to the detection of signs that is based on the color filtering does not
require a lot of computing resources. This explains the popularity of this approach in
the early 1990s until 2006 [8]. However, the accuracy of this approach is insufficient /
too low. A good example of one of the three signs which is "not red enough" in terms
of using color filtering, is shown in Figure 1.
Fig. 1. Error detection in sign detection based on color information.
64

The current performance of embedded computing systems allows using more
sophisticated algorithms of detecting signs in real-time. In addition to color
information, all of these systems detect the signs, using the information about the
objects’ shape [10].
One of the most common methods that use the information about shape is Hough
Transform [11]. The main idea of Hough transform detection method is using a
special Hough space, which is actually an accumulator image with voices for the
sought-for objects in each pixelHaving transformed the original image, the Hough
space image contains one or several brightest points with the largest amount of voices
for the objects coordinates [12]. For example, in paper [13], a Hough-like transform is
used to detect the U.S. speed limit signs. The main advantage of this method is
robustness and resistance to different distortions like noise. However, this method is
hard to implement in real time when processing full HD frames from a video
sequence. Thus, we propose a new effective and fast method of traffic sign
recognition based on color filtering.
3 Detecting Signs using Color Shape Regular Expressions
The proposed in this paper approach lies in the fact that the procedure of color
filtering and pattern matching is modified: we use regular expressions like a scheme
for colors of image lines pixels in image line processing. We will call this approach
color shape regular expressions. These regular expressions are implemented using the
Deterministic Finite Automaton (DFA) or Non-Deterministic Finite Automaton (NFA)
[2]. To describe it, let us consider the detection of the class of red traffic signs.
Further, according to the properties of DFA, the approach can be generalized to an
arbitrary set of signs.
The steps of our algorithm are as follows.
1. The coordinates of ‘white point’ are identified in the analyzed frame retrieved from
a camera.
2. A saturation analysis is performed according to (1), to make a decision about the
point color. The threshold values are determined based on the coordinates of the
white point. The threshold is performed in accordance with the threshold values
(1).
3. The colors are divided into three main classes: red (class R), white (class W), and
class C with all the colors which are not represented in R and W.
4. Passing through the image pixels line by line, each area is compared to the possible
line of the sought-for sign.
5. The following comparison is made. For a set of signs, it is possible to select the
most distinctive line with certain sequences of pixels with colors from the
mentioned classes. So, for many of the prohibition signs and the signs of priority
(for example, ‘passing is prohibited’, ‘give way’, ‘parking is prohibited’), the
typical sequence of colors is coded as:
R{b
0
,b
1
}[WRG]{w
0
,w
1
}R{b
0
,b
1
} (2)
The sequence (2) is treated as a regular expression written for the alphabet of
symbols for color classes red, white and grey - R, W, G. Here the constants {b
0
, b
1
}
65

denote a valid range limits of the width of the red sign border line,; {w
0
, w
1
} specify
the range of the width of the inner area of the sign.
Formally, the regular expressions, dealing with image lines, can be defined in a
similar way as the regular expressions that processes the text strings [3]. Table 1
shows the main elements of color shape regular expressions introduced by analogy
with the text regular expressions. A symbol means the color of a pixel. The positive
result of the processing of some segment of the image line with the help of color
shape regular expression means a positive localization decision.
Table 1. Color shape regular expressions elements.
Name Regular expression Destination
Epsilon Ε {""}
Character Α For some character α, i.e. the color of
pixel form class α.
Concatenation RS Denoting the set {αβ|α in R and β in S}
e.g., {”ab”}{”d”, ”ef”} = {”abd”, ”abef”}
Alternation R|S Denoting the set union of R and S. e.g.,
{”ab”}|{”ab”,”d”,”ef”} = {”ab”,”d”,”ef”}.
Kleene star A* Denoting the smallest super-set of R that
contains ε and is closed under string
concatenation. This is the set of all strings
that can be made by concatenating zero or
more strings in R, e.g., {”ab”, ”c”}* =
{ǫ,”ab”,”c”,”abab”,”abc”,”cab”,”ababab”,
...}. Where R is a set of symbols..
Kleene cross This is the set of all strings that can be
made by concatenating one or more
strings in R
Regular expressions can be implemented in the form of DFA and NFA. The DFA
implementation complexity is O(N), where N is a string size [2].
DFA implementing expression (2) is shown in Fig. 2, symbols R, W, and G means
colors which is shown in (2). In this figure we use the following notation for the DFA
states. State 0 is a state before the object, state 1 is the object beginning, N means
detection failure, Y means positive detection. States Y and N are final states of DFA.
States from A to H is calculated from expression (2) by the following rules:
A = b
0
, B = b
1
, C = b
1
+ 1, D = b
1
+ w
0
,
E = b
1
+ w
1
, F = b
1
+ w
1
+ 1, G = b
1
+ w
1
+ b
0
, H = b
1
+ w
1
+ b
1
.
66
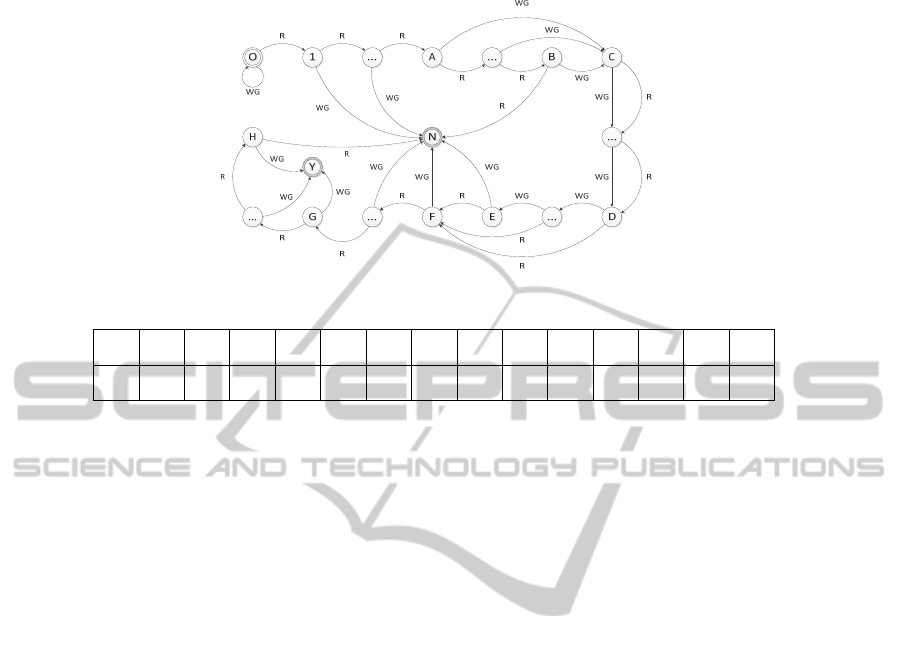
Fig. 2. Deterministic finite automation implementing a certain expression.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
G G R R R R R G G G R R R R R
Fig. 3. An example of Image line for processing using DFA.
The disadvantage of such definition is the fact that the color shape regular
expression matching, implemented as a DFA, can lead to missing objects in the
image. Suppose the image line in Figure 3 begins with the desired object pixel 11,
but expression (2) will begin processing with pixel 3. When the value b
0
<5, the true
position of the object will be treated by pattern (2) as an inside part of the object (this
part is shown as states from C to H in Fig. 2. Thus, the true position of the object will
be misdetected.
Non-deterministic finite automaton (NFA) implementation, which allows multiple
switches between the states, is devoid of this disadvantage and does not fail to
localize the object. NFA regular expressions are implemented in (flex, grep, pcre) and
in iNFAnt for GPU processors [4].
We can show that in the case of color shape regular expressions processing with
NFA, we can obtain the following modification of the scheme from Figure 2. Starting
from state C to state H, any red pixel is regarded as an opportunity to branch to a new
DFA of the same structure. This simplified scheme can keep the complexity of the
performance of each branch of the algorithm O(N), but nevertheless it realizing NFA.
In more detail, the features of such scheme implementation for the GPU are
described in the next section.
Finally, regular expression (2) could be generalized for other classes of traffic
signs, using the alternation operation from Table 1. For example, we can add blue
sign support to expression (2):
R{b
0
,b
1
}[WRCB] {w
0
,w
1
}R{b
0
,b
1
}| B{b
0
,b
1
}[WRCB]{w
0
,w
1
}B{b
0
,b
1
} (3)
where B is a symbol for the blue color class, other symbols are the same as in
expression (2). To use this regular expression, we should include blue pixels detection
in the color segmentation step. After a positive localization result of the expressions
for some segment α of the image line, the same localization will be process in the
orthogonal direction to the segment. If the search in the orthogonal direction gives a
67

positive result for orthogonal segment β, then the rectangle made by segments α and β
is selected as boundary of the required object. Finally, we denote a localization rule
for the image segments that build boundary rectangle of the object:
() () , ,
ii iiii
RRtrue
(4)
where
i
and
i
are intersected segments of the image line and the column, and R is
some color shape regular expression (2) or (3). In general, the regular expression in
(4) may differ for the rows and columns of the image, but in case of the traffic sign
detection they are the same. Consequently, the boundary rectangle S for the object is
defined by the intersection of the rectangles
(, )
iii
S
, which are based on the
crossing of segments
i
and
i
.
(,)
iii
i
SS
(5)
The composition of rules (2) – (5) provides the overall localization rule. Such
composition that build the boundary rectangle of the object is based on the principle
of enhancement of weak classifiers (boosting) which are successfully used in
AdaBoost [5] and Viola Jones detectors [14].
4 GPU Implementation based on Finite Automaton
Parallel processing is very important for such embedded systems as driver assistant
systems. In this section, we will describe massively parallel implementation of color
shape regular expressions for GPU. Then, we will compare the proposed method with
well-known Hough transformation.
In commonly used approaches to pattern or regular expression, matching
parallelization is made using data decomposition. It means that each parallel thread
processes an independent portion of data. For regular expression matching in network
traffic, each thread processes its own packet; for template matching in image analysis,
each thread processes one row of the image.
We will discuss three approaches of GPU implementation for color shape regular
expressions. Firstly, we will consider a naïve “plain” implementation of pattern
matching, using expression (2) as a template. Secondly, we will study DFA
implementation of the color shape regular expressions, and finally, we will consider
the implementation based on NFA of a special kind. In all of these approaches, image
lines are processed independently.
The plain implementation uses conditions, loops and accumulator variables to
implement regular expression search like usual pattern matching. The code in this
case contains many conditions and branching. It works for CPU processing, but as
GPU architecture is close to SIMD [16], branching is too expensive for GPU.
On a modern GPU, a number of threads (usually 8 or 16) execute one instruction at
a time. This number of threads is called warp [16]. If only one thread of the warp
satisfies a certain condition, other threads must wait for this thread. This fact leads to
more than 8 or 16 times decrease in overall computation speed.
68

There are many branching conditions for the naïve implementation of color regular
expressions. For example, if one thread of the warp finds pixels matching to the
object’s part, and the other threads do not, then they must wait. This feature strongly
limits GPU parallelization speedup of naïve implementation of color shape regular
expressions. In our realization, the GPU/CPU speedup was 3.3 as shown in Table 2.
In traffic analysis systems and IPS [15], the speedup of GPU implementation of
regular expression matching is more than 15. In these systems, DFA is usually used,
and state-of-the-art systems use NFA [17].
DFA implementation for the color shape regular expression is quite similar to DFA
implementation of the text regular expression. The listing 1 shows this DFA code. In
this listing array statesTable implements states of DFA, function
storeObject() is called when object detected. NFA implementing by last string
of the for-loop when function startNewBranch() is called.
Listing 1. NFA implementation of the color shape regular expressions.
for(i = 0, i<N, i++){
symbol = symbolFromImageLine(img, i);
state = statesTable[state][symbol];
if(state == 1) objectStart = i;
if(state == STATE_N) objectStart = 0;
if(state == STATE_Y) storeObject(objectStart, i);
if(state >= STATE_C & symbol == RED)
startNewBranch(i);
}
In our case, we need only simple special case of NFA. The main DFA processes
the line until state C. It is the state when the first border of the object is passed.
Starting from this state, every red pixel is treated as a possible starting point for
another object location. So, every state from C is threated as two way decision in
terms of NFA [2]. In each state with two way decision we must start new DFA
processing when R symbol come. The listing in Fig. 5 shows the principal code of this
special case of the NFA. Ideally in each “backward point” we need a new thread to
process, really we reserve fixed size tread pool for processing the line, using the
described NFA. The size of the pool is a parameter for experimental estimation.
5 Results
We compared the proposed method with Hough transform that is commonly used for
traffic signs detection. We use standard GPU implementation of Hough transform
from OpenCV library [18]. This realization has one disadvantage: it detects only
circle shaped signs, but with high accuracy. Our regular expression matching
algorithm detects all the signs with square, circle and triangle shapes. Unfortunately,
the algorithm has a possibility of false positive detection. Such kind of error should be
filtered later during the sign recognition. Consequently, it does not seem possible to
make a precise comparison of the accuracy of Hough detector and color shape regular
expressions. As shown in many papers the accuracy of Hough transform is 90-95%
69
for traffic sign detection. Accuracy of our detection algorithm is quite less, but all the
errors are false positive detection which can be eliminated in recognition stage.
There are comparisons results of the performance of the described algorithms are
shown in Table we show. We used Nvidia GeForce 560 as GPU, and Intel i5 2430 as
CPU. It is shown in Table DFA implementation has no effect for performance of CPU
realization but significantly increasing GPU performance. Implementation of NFA is
slower than DFA but it reduces false positive detection errors by 31% in comparison
with DFA. As shown in table color shape regular expressions are significantly faster
than Hough transform for traffic sign detection.
Table 2. Performance comparison between Hough transform and color shape regular
expressions.
CPU, ms GPU, ms
Hough transform 90 30
Color shape regular expressions, naïve
implementation
15 4.5
Color shape regular expressions, DFA 16 2.5
Color shape regular expressions, NFA 20 3
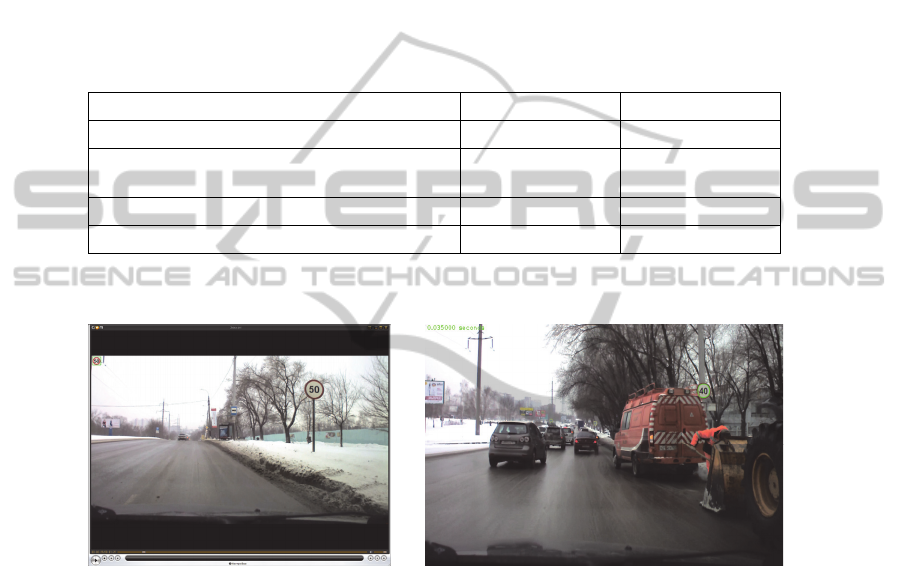
Finally, examples of traffic signs detection and recognition by Hough transform and
by color shape regular expression is shown in Fig. 4.
Fig. 4. Detection and recognition of the traffic sign.
6 Conclusions
Regular expression matching on GPU is state-of-the-art technique for the processing
of a huge amount of the text information, for example, in network activity analyzers
and intrusion prevention systems. This paper proposes a fast and robust algorithm for
traffic sign detection, which is based on color shape regular expressions matching
through the image pixels. The special case of non-deterministic finite automaton used
for GPU implementation allows reaching of more than 15 times speedup in
comparison with CPU version.
Unfortunately, the proposed algorithm has a possibility of false positive detection.
Such kind of error should be filtered later during the sign recognition. Consequently,
70

it does not seem possible to make a precise comparison of the accuracy of Hough
detector and color shape regular expressions. As shown in many papers the accuracy
of Hough transform is 90-95% for traffic sign detection. Accuracy of our detection
algorithm is quite less, but all the errors are false positive detections which can be
eliminated in recognition stage. Detailed accuracy comparison of Hough transform
and color shape regular expressions is a challenge for further research.
Acknowledgements
Authors are grateful to Professor Vladimir Fursov for many helpful discussions and
the constructive criticism concerning the evaluations. This work was partially
supported by Russian Foundation of Basic Research (Project No. 11-07-12051-ofi-m,
12-07-00581-a, 12-07-31208).
References
1. Shneier, M.: Road sign detection and recognition. Proc. IEEE Computer Society Int. Conf.
on Computer Vision and Pattern Recognition. (2005) 215 – 222.
2. Hopcroft, John E.; Motwani, Rajeev; Ullman, Jeffrey D. (2001). Introduction to Automata
Theory, Languages, and Computation (2 ed.). Addison Wesley. ISBN 0-201-44124-1. 551
p.
3. Aho, Alfred V. Algorithms for finding patterns in strings, In van Leeuwen, Jan. Handbook
of Theoretical Computer Science, volume A: Algorithms and Complexity. The MIT Press.
pp. 255–300, 1990.
4. Cascarano N., Rolando P., Risso F., R. Sisto. 2010. iNFAnt: NFA pattern matching on
GPGPU devices. SIGCOMM Comput. Commun. Rev. 40, 5, (2010). 20-26.
5. Freund Y., Schapire R.E. A Decision-Theoretic Generalization of on-Line Learning and an
Application to Boosting. 1995,34pp.
6. Shneier, M.: Road sign detection and recognition. Proc. IEEE Computer Society Int. Conf.
on Computer Vision and Pattern Recognition. (2005) 215 – 222.
7. Ruta A., Y. Li, X. Liu: Towards Real-Time Traffic Sign Recognition by Class-Specific
Discriminative Features. British Machine Vision Conf. (2007).
8. Torresen, J. A., W. Bakke, Y. Yang: Camera Based Speed Limit Sign Recognition System.
13th ITS World Congress and Exhibition. (2006) 115 – 129.
9. Ren, F., J. Huang, R. Jiang, R. Klette: General traffic sign recognition by feature matching.
IEEE 24th Int. Conf. Image and Vision Computing. (2009) 409 – 414.
10. Oh, J.-T., H.-W. Kwak, Y.-H. Sohn, W.-H. Kim: Segmentation and Recognition of Traffic
Signs Using Shape Information. Lecture Notes in Computer Science, Springer
Berlin/Heidelberg. Vol. 3804. (2005) 519 – 526.
11. Ballard, D.: Computer vision. Englewood Cliffs, N.J., USA. (1982).
12. Hardzeyeu, V., Klefenz, F.: On using the hough transform for driving assistance
applications. 4th International Conference on Intelligent Computer Communication and
Processing, (2008) 91-98.
13. Christoph Gustav Keller, Christoph Sprunk, Claus Bahlmann, Jan Giebeland, Gregory
Baratoff: Real-time Recognition of U.S. Speed Signs. Intelligent Vehicles Symposium,
IEEE. (2008) 518-523.
71

14 Viola P., Jones M., Robust Real-time Object Detection, Second International Workshop On
Statistical And Computational Theories Of Vision – Modeling, Learning, Computing, And
Sampling, (2001) 25.
15 Vasiliadis G., Polychronakis M., Ioannidis S., Parallelization and Characterization of
Pattern Matching using GPUs, IISWC’2011. (2011).
16 NVIDIA CUDA C Best Practices Guide, Santa Clara, (2010) 75p.
17 Zu Y., Yang M., Xu Z., Wang L., Tian X., Peng K., Dong Q., GPU-based NFA
implementation for memory efficient high speed regular expression matching, Proceedings
of the 17th ACM SIGPLAN symposium on Principles and Practice of Parallel
Programming, (2012) 129-140.
18 http://opencv.willowgarage.com/wiki/
72
