
Fault-tolerant Scheduling of Stateful Tasks in Uniprocessor Real-time
Systems
Petr Alexeev
1
, Pontus Bostrm
1
, Marina Waldn
1
, Mikko Huova
2
, Matti Linjama
2
and Kaisa Sere
1
1
Department of Information Technologies, Bo Akademi University, Turku Centre for Computer Science, Turku, Finland
2
Institute of Hydraulics and Automation, Tampere University of Technology, Tampere, Finland
Keywords:
Real-time Systems, Deadlines, Recovery Block, Deadline Mechanism, Backwards-DM, Static Scheduling.
Abstract:
The recovery block (RcB) approach is intended for masking software faults. This approach can be im-
plemented for real-time systems by establishing primary and alternative versions for each task and pro-
viding a fault-tolerant preemptive schedule which masks possibly missed deadlines. Existing schedul-
ing algorithms require rearrangement of tasks parameters during run-time. Applying these algorithms for
stateful tasks which keep their state between releases is difficult. We defined two off-line scheduling
algorithms: Backwards-Direct-Deadline-Monotonic (B-D-DM) and Earliest-Deadlines-as-Late as possible-
Deadline-Monotonic (EDL-DM). These algorithms are based on existing algorithms used for periodic tasks:
Backwards-DM, EDL and DM. The main advantage of our algorithms is the ability to calculate all parameters
of the schedule off-line and implement RcB for stateful tasks. We propose a feasibility check for the resulting
schedule. The proposed algorithm B-D-DM was implemented in a case study of a control system designed in
Simulink.
1 INTRODUCTION
Hard real-time systems are used in many areas to con-
trol physical processes. Frequently these processes
are potentially dangerous for humans or the environ-
ment. There is a need for ensuring safety by designs
of such systems. Unfortunately high design complex-
ity of modern real-time systems does not allow pre-
venting all software design errors. In some cases soft-
ware errors can cause serious accidents or even catas-
trophes.
Software design diversity implemented by a re-
covery block approach (RcB) is a widely used fault-
tolerance method. In real-time systems this method
can be implemented by the Deadline Mechanism, pro-
posed in (Chetto and Chetto, 1989), which requires
defining primary and alternative versions of the soft-
ware and providing a scheduling algorithm. Exam-
ples of such algorithms are described in (Chetto and
Chetto, 1989; Chetto, 1994; Ding and Guo, 2009;
Han et al., 2003). These algorithms have assump-
tions, like:
• They should be able to quickly abort the execution
of the primary task.
• Execution results of tasks do not depend on their
previous states. This allows to omit execution
of either primary or alternative task if it is not
needed.
• Parameters of the scheduler, e.g., tasks priorities,
should be quickly adjustable during real-time ex-
ecution.
Unfortunately these assumptions do not hold for all
real-time systems. Let us consider each assumption
in detail.
Threads and processes allocate their own memory,
e.g., stack, that cannot be deallocated immediately. In
some cases threads use shared variables in a common
address space. This implies the need for keeping a
strict policy of allocation and deallocation of these
variables to prevent memory leaks. This policy de-
mands to deallocate some variables before a thread
can be aborted. For this reason the process of task
abortion takes some time. In some cases a task can-
not be aborted.
Software modules can have internal memory
(state) which affects on their execution results. This
state is stored between their invocations and needs to
be updated during each invocation of the module. The
execution results of these modules depend on its pre-
vious states.
Some real-time execution platforms do not allow
rearranging task priorities during run-time. For these
189
Alexeev P., Boström P., Waldén M., Huova M., Linjama M. and Sere K..
Fault-tolerant Scheduling of Stateful Tasks in Uniprocessor Real-time Systems.
DOI: 10.5220/0004305701890194
In Proceedings of the 3rd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2013), pages 189-194
ISBN: 978-989-8565-43-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

cases only static (off-line) scheduling algorithms can
be used.
In this paper we propose two fault-tolerant
scheduling algorithms based on the Deadline Mech-
anism. Our algorithms are free from the described
assumptions and exploit the Earliest Deadline as Late
(EDL) as possible algorithm, proposed in (Chetto and
Chetto, 1989). We applied our algorithms to a case
study of the hard real-time control system used for
hydraulics.
The rest of the paper structured as follows. The
next Section presents some terminology of real-time
software used in this paper. Detailed description of
problems to be solved is presented in Section 3. This
section also shows disadvantages of existing methods
and the example of the case study used in the research.
Proposed scheduling algorithms and feasibility check
are presented in Section 4. In Section 5 a comparison
of the proposed fault-tolerant scheduling algorithms
with existing methods is presented. Section 6 sum-
marizes the main results.
2 TERMINOLOGY
A real-time system consists of a set of preemptive
tasks Γ ,
{
τ
1
, τ
2
, ··· , τ
N
}
. Each task has its own pri-
ority p
i
. An execution of the task τ
i
with the index j
is called job or task instance τ
i j
.
The worst-case execution time (WCET) of the
task defines maximum possible execution time for the
task C
i
. End-to-end execution of the job can take more
time than C
i
because of preemption by high-priority
tasks. In real-time systems each task is accompanied
with a deadline D
i
- the maximum time duration al-
lowed to the task for execution. The end-to end execu-
tion of a job is described by the following parameters:
• Release time (offset) r
i j
. This is the time at which
a job becomes ready for execution.
• Finishing (termiantion) time f
i j
. This is the time
at which a job finishes its execution.
If τ
i
is requested with some fixed time interval this
task called periodic with period T
i
. For periodic tasks
we can define some parameters as absolute and rela-
tive. Relative parameters are marked by capital letters
and calculated for a one period of execution and use
start time of the period as the starting point. Abso-
lute parameters are marked with small case letters and
calculated for all periods starting from some starting
point.
Different scheduling algorithms can be used to ar-
range priorities and release times for tasks in a task
set. If priorities are not changed during the execu-
tion time this scheduling algorithm called off-line or
static. In this case priorities can be calculated off-line
even before the compilation of the software code. Dy-
namic scheduling algorithms adjust tasks parameters
according some rule during run-time.
For the set of periodical tasks hyperperiod or plan-
ning cycle is established T
H
= LCM (T
1
, T
2
, ··· , T
N
)
1
.
Periodical tasks are defined by tuples (T
i
, C
i
, D
i
).
Data transfers between tasks affects scheduling
scheme. We assume that the Non-Preemptive Protool
(NPP) is used for all possible data transfers between
tasks. NPP provides overhead for large number of
data transfers, but, as it is noted in Section 7.10 of
(Buttazzo, 2011), it prevents both deadlocks and pri-
ority inversion.
Each hard real-time scheduling scheme has to be
checked for feasibility. We say that schedule is feasi-
ble if it allow all tasks to complete before their dead-
lines.
3 PROBLEM DESCRIPTION
The execution result of task can be obtained at the
moment of finishing time F
i
. In the worst case F
i
= D
i
,
in the best case F
i
≤ C
i
but it is safe to consider only
F
i
= C
i
. For this reason the maximum time jitter of the
execution result J
i
= D
i
−C
i
. If C
i
D
i
2
this value
will be big.
In the case of rate monotonic-based (RM-based)
scheduling algorithms, like described in (Ding and
Guo, 2009; Han et al., 2003), deadlines are assumed
to be equal to periods D
i
= T
i
. For this reason J
i
=
T
i
− C
i
. Consider the following example: C
i
= 1,
T
i
= 100. This implies that the execution result can
be obtained at random time in the interval [1, 100]
and J
i
= 99. This can be unacceptable if correspond-
ing task performs interaction with peripheral devices,
sensors or actuators.
Existing fault-tolerant scheduling algorithms usu-
ally assume tasks as invocations of stateless functions
because execution results of such tasks depend on
their current input data only. This allows, for exam-
ple, omitting execution of alternative version of the
task if corresponding primary version terminated suc-
cessfully as proposed in (Chetto, 1994; Chetto and
Chetto, 1989; Han et al., 2003; Ding and Guo, 2009).
Unfortunately, this approach is inapplicable for
many data processing algorithms where some vari-
ables (memory blocks, delay blocks) are used to store
1
The LCM abbrevation denotes least common multiple.
2
The notation A B means that A is much less than B.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
190
information from previous invocations. An interest-
ing example of such algorithm is a digital filter where
delay blocks are essential. The stateful behaviour of
tasks must be taken into account by the new fault-
tolerant scheduling algorithm.
The invocation of stateful primary and alternative
versions of functions cannot be omitted. Both primary
and alternative versions of task should have the ability
to be completed before the deadline if primary version
completes within its WCET.
3.1 The Case Study
The need for the new scheduling algorithm was in-
spired by the case study of the controller of digital
hydraulics described in publications of Linjama and
Huova (Linjama et al., 2007). A detailed description
of the case study and the implementation of the pro-
posed fault-tolerant scheduling algorithms with ex-
perimental results is presented in (Huova et al., 2012).
This controller is a non-linear digital control sys-
tem, which consists of a plant (hydraulics), sen-
sors, actuators and a computing device with the soft-
ware. The whole software was designed as a multirate
Simulink model. ANSI C source code was automati-
cally generated from this model. All software genera-
tion and scheduling parameters were placed inside of
the model.
The model of the control system was decomposed
into the following periodic real-time stateful tasks:
• Task 1. Sensors data acquisition. Period 1 ms.
• Task 2. Main Control Algorithm (MCA) and ac-
tuators interaction. Period 10 ms.
The MCA is a complicated and potentially unreliable
part of the system. The RcB approach was proposed
to ensure safety by masking possible software faults
in the MCA. A simplified version of the MCA was
designed as an implementation of the alternative ver-
sion of MCA. The computation time for the primary
version was about 1 ms, for the alternative version it
was about 0.1 ms.
The specific of the hydraulics plant requires up-
dating states of these actuators (on/off valves) period-
ically with minimal jitter. This requires minimizing
the jitter for the output of task 2.
Existing fault-tolerant scheduling algorithms does
not take into account the stateful behaviour of tasks
(both versions of MCA should keep its own state
between invocations) and do not allow to meet the
requirement for minimizing of the jitter of its out-
put. This forced us to propose the new fault-tolerant
scheduling algorithm based on existing RcB ap-
proaches.
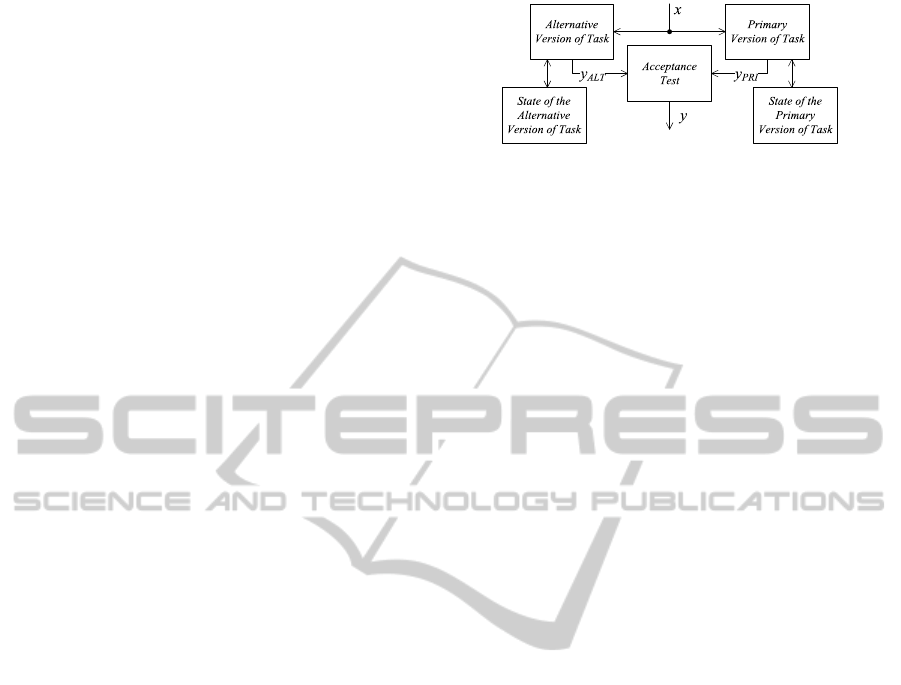
Figure 1: Recovery blocks approach for a stateful task.
4 THE PROPOSED APPROACH
The RcB approach requires decomposing each task τ
i
into the primary version (PRI) τ
PRIi
, alternative ver-
sion (ALT) τ
ALTi
and the acceptance test (AT) AT
i
as presented in Figure 1. The scheduling algorithm
has to provide the ability to complete both τ
PRIi
, τ
ALTi
and AT
i
before the deadline D
i
if the real computation
time for the τ
PRIi
does not exceed C
PRIi
. The states of
both τ
PRIi
and τ
ALTi
are independent, so possible fail
of τ
PRIi
will not affect on the τ
ALTi
and its state.
As shown in Figure 1, the AT
i
determines which of
two outputs (from τ
PRIi
or from τ
ALTi
) should be used
for the resulting value of the whole RcB. This implies
the following precedence constraint: (τ
PRIi
, τ
ALTi
) ≺
AT
i
. The order of execution of τ
PRIi
and τ
ALTi
is in-
different. For this reason it is safe to assume τ
PRIi
≺
τ
ALTi
≺ AT
i
.
In order to follow the Deadline Mechanism
(Chetto and Chetto, 1989) the priority of the τ
PRIi
should be lower than priority of the τ
ALTi
. There are
no restrictions to the priority of τ
ALTi
relatively to the
priority of the AT
i
. We implemented sequential exe-
cution of τ
ALTi
and AT
i
as one recovery (REC) task
τ
RECi
. In case if τ
PRIi
takes more computation time
than expected it will be preeempted by the τ
RECi
. A
similar approach was used in (Ding and Guo, 2009;
Han et al., 2003; Chetto and Chetto, 1989). The
precedence constraint is the following:
τ
PRIi
≺ τ
RECi
| i = 1, 2, · · · , N (1)
We are going to consider two algorithms for re-
covery tasks scheduling. In Section 3 it was shown
that deadlines allow defining upper limit of jitter
range for task output result. Hence, deadline-based
scheduling algorithms are appropriate.
4.1 Static EDL Algorithm
One of the algorithms, used in RcB implementation,
known as Deadline Mechanism, is the EDL algo-
rithm, defined in (Chetto and Chetto, 1989). This al-
gorithm is based on Earliest Deadlines First (EDF)
strategy and proposes to release tasks as late as pos-
sible while keeping their deadlines. It was shown in
Fault-tolerantSchedulingofStatefulTasksinUniprocessorReal-timeSystems
191

Figure 2: Example of schedule produced by the static EDL.
(EL Ghor et al., 2011) that it is possible to define static
schedule for a periodical task set by EDL. This ap-
proach requires to calculate release times for all in-
stances of all tasks within hyperperiod. In this case
EDL is a static algorithm.
Within hyperperiod T
H
EDL schedule can be
transformed to EDF by replacing time t to T
H
−t. In
general case EDF defines preemptive schedule that re-
quires tasks priorities rearrangement during the run-
time. Unfortunately priorities modification during
the run-time was impossible for our case study. For
this reason we used non-preemptive version of the
EDF that allows arbitrary selection of the priorities.
This enables using immutable priorities and calculat-
ing off-line all release and finish times for all jobs.
Consider the process of defining static EDL schedule.
This process starts by defining absolute deadline
d
i j
for each task instance τ
i j
within hyperperiod. Ac-
cording to deadlines absolute finishing times f
i j
for
all task instances are also calculated. It is easy to see
that r
i j
= f
i j
−C
i
because we selected non-preemptive
EDL. The schedule is feasible if all tasks are released
no earlier than the start of the period:
r
i j
≥ ( j − 1)T
i
| j = 1, 2, ··· ,
T
H
T
i
(2)
Consider example of task set Γ =
{
τ
i
= (T
i
, C
i
, D
i
)
}
composed from tasks:
τ
1
= (9, 2, 8), τ
2
= (12, 4, 11), τ
3
= (18, 3, 17).
The hyperperiod will be 36. The resulting schedule is
presented in Figure 2.
For the task with both shortest deadline and pe-
riod (τ
1
) the relative release time R
1 j
vary in different
period. If τ
1
will invoke recovery routines its corre-
sponding primary task will have no more than 5 CPU
cycles for the execution in the worst case (minimal
relative release time R
1min
= 5).
Another scheduling algorithm for recovery tasks
can be defined to provide more execution time for the
task with the shortest deadline. In (Ding and Guo,
2009; Han et al., 2003) Backwards-Rate-Monotonic
(B-RM) algorithm is proposed to schedule periodi-
cal recovery tasks. This algorithm combines Rate-
Figure 3: Example of schedule provided by the B-DM.
Monotonic (RM) priority arrangement
3
with as late
as possible approach. Unfortunately, B-RM does not
take into account deadlines; this does not allow min-
imizing finishing time jitter. For this reason we used
static Backwards-Deadline-Monotonic (B-DM) algo-
rithm.
4.2 Backwards-Deadline-Monotonic
Algorithm
B-DM algorithm requires to use DM priorities ar-
rangement
4
and to schedule tasks as late as possible
keeping their deadlines at the same time. It requires
to calculate release and finishing times for all task
instances within hyperperiod. For all tasks without
taking into account possible preemption these param-
eters can be calculated as r
i j
= ( j − 1)T
i
+ D
i
− C
i
,
d
i j
= r
i j
+C
i
. For the task with the highest priority
these parameters are correct, but for tasks with lower
priorities release times needs to be corrected because
of the preemption from tasks with higher priority. For
this reason we used B - a set of CPU cycles occupied
by jobs. The schedule is calculated by iteratively up-
dating both B and release time for each job starting
from the task with the highest priority. The feasibility
rule for the schedule is the same as for EDL defined
by (2).
Consider schedule produced by the B-DM algo-
rithm for the example from the Subsection 4.1. The
resulting schedule is presented in Figure 3 which is
similar to the schedule presented in Figure 2. For the
task with both shortest deadline and period (τ
1
) the
relative release time R
1 j
does not vary in different pe-
riod.
Minimum release times are the following:
(R
1min
, R
2min
, R
3min
) = (6, 5, 8). For the same task
set EDL provides (R
1min
, R
2min
, R
3min
) = (5, 5, 8).
For this example B-DM comparing to EDL al-
lows to get bigger values of minimal relative re-
3
Shorter period implies higher priority, priorities not
changed during the run-time.
4
Shorter relative deadline implies higher priority, prior-
ities not changed during the run-time.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
192

lease times. This property does not hold for
all task sets. For example, for the task set
Γ =
{
τ
1
= (9, 2, 8) , τ
2
= (12, 4, 10) , τ
3
= (18, 3, 15)
}
EDL provides (R
1min
, R
2min
, R
3min
) = (4, 5, 8), while
B-DM provides (R
1min
, R
2min
, R
3min
) = (6, 4, 8).
B-DM is preemptive algorithm, so it requires to
establish task priorities by DM rule. Figures 2 and
3 illustrates that for both B-DM and EDL there is no
idle time between each task release and its deadline
regardless if the preemption is used or not. If there
would be any idle time in this interval, the task can be
released later which contradicts with EDL definition.
4.3 Resulting Schedule of Primary
and Recovery Tasks
Both static EDL and B-DM can be used to define re-
lease times for recovery tasks, while primary tasks
should have lower priorities to ensure their preemp-
tion. We define safety level (SL) to be the lowest pos-
sible priority level for recovery task.
Precedence constraints (1) can be ensured by
defining deadlines for primary tasks to be no higher
than release times of corresponding recovery ver-
sions. As release time for each task instance of τ
RECi
can vary between their periods, the final deadline for
correspondent primary version τ
PRIi
can be calculated
as minimal relative release time R
RECiMIN
of τ
RECi
.
The DM algorithm can be used to define priorities of
primary tasks according to their deadlines. All these
priorities have to be lowered below SL.
The final scheduling algorithm is formed by
the combination of B-DM or static EDL algorithm
for recovery tasks and DM algorithm for primary
tasks. The scheduling scheme in this case is de-
fined by priorities for all tasks and release times
for recovery tasks. All these parameters can be
calculated off-line, hence the complete algorithm is
static. We defined fault-tolerant algorithm based on
B-DM as Backwards-Direct-Deadline-Monotonic (B-
D-DM). The similar algorithm based on static EDL
we defined as EDL-DM.
Each task set in this case is defined by tuple
(T
i
, C
RECi
, C
PRIi
, D
i
). The whole task set is presented
by Γ
PRI
=
{
τ
PRIi
= (T
i
, C
PRIi
, R
RECiMIN
)
}
and Γ
ALT
=
{
τ
ALTi
= (T
i
, C
ALTi
, D
i
)
}
. Set Γ
ALT
is scheduled by B-
DM or EDL, while set Γ
PRI
is scheduled by DM.
The example of the schedule, provided
by B-D-DM algorithm for the task set
Γ =
{
(30, 4, 8, 25), (60, 8, 16, 55)
}
is presented
in Figure 4.
Feasibility Γ
ALT
can be ensured by condition (2).
This feasibility does not depend on Γ
PRI
because pri-
orities of all tasks τ
PRIi
are below SL. Feasibility of
Figure 4: Example of the schedule provided by the B-D-
DM.
Γ
PRI
can be ensured by feasibility check for DM pro-
posed in (Audsley et al., 1991). The algorithm of this
check is based on the response time analysis. Figure
4.17 in (Buttazzo, 2011) contains implementation of
this algorithm.
5 DISCUSSION
The contribution of this paper is the combination of
existing algorithms EDL, DM and B-DM for ensuring
safe execution of periodical stateful tasks by the RcB
implementation with the following characteristics:
1. Priorities for primary and alternative tasks are im-
mutable and assigned by the Deadline Mecha-
nism.
2. Primary and alternative tasks have isolated states.
3. Precedence constraints are ensured by assigning
deadlines for primary tasks equal to release times
of alternative tasks.
4. The resulting schedule ensures execution of all al-
ternative tasks, all primary tasks are executed if
all of them meet their deadlines.
A deadline miss by primary task is masked by using
execution results of corresponding alternative task.
The moment of switching from the output of the pri-
mary task to the output of the alternative task depends
on the acceptance test.
In order to increase the reliability of the approach
alternative tasks need to be reliable. Formal verifi-
cation tools can be used to prove absence of certain
problems such as functional errors (the program com-
putes the wrong result), run-time exceptions, non-
termination of loops and recursion or absence of
deadlocks. Additionally safe WCETs for all recovery
tasks can be estimated. This allows defining designs
that can be considered as safe if there are no hardware
faults.
Algorithm B-D-DM was adapted to the case study
described in Subsection 3.1 and successfully exam-
ined with the workbench. Experimental results are
Fault-tolerantSchedulingofStatefulTasksinUniprocessorReal-timeSystems
193

presented in (Huova et al., 2012).
The following disadvantages have been discov-
ered concerning the proposed scheduling algorithms.
1. A deadline miss of a primary task can cause other
primary tasks to miss their deadlines.
2. Both approaches requires redundancy in the pro-
gram memory and data memory.
3. A hardware fault can cause the system to be un-
safe.
Despite of highlighted disadvantages the EDL-DM
and B-D-DM algorithms can ensure safety of com-
plex software designs and can be relatively easily im-
plemented even with design tools like Simulink.
6 CONCLUSIONS
AND FURTHER RESEARCH
In this paper we proposed combining existing
scheduling algorithms B-DM, EDL and DM to extend
the Deadline Mechanism implementation of the RcB
approach to periodical stateful tasks, widely used in
practice, e.g. digital filters. These type of systems can
be difficult for various existing fault-tolerant schedul-
ing algorithms. As the result we defined two fault-
tolerant off-line scheduling algorithms: B-D-DM and
EDL-DM.
Both proposed algorithms assign all scheduling
parameters of alternative tasks according EDL or B-
DM algorithms while primary tasks are scheduled ac-
cording to DM rule. These algorithms take into ac-
count task deadlines that allow specifying the time
jitter for each task. The parameters of the resulting
schedule allow both primary and alternative tasks to
be completed for each period. We considered details
of both EDL and B-DM algorithms to determine all
parameters of the final schedule and feasibility check
for alternative versions of tasks. The feasibility of the
primary tasks can be checked by a known algorithm.
The results of this feasibility checks are safe but
too pessimistic. The improvement of this algorithm
requires taking into account additional parameters of
tasks and defining additional properties of B-D-DM
and EDL-DM algorithms. This improvement goes be-
yond of the scope of this paper.
ACKNOWLEDGEMENTS
The work has been partially funded by the EFFIMA
program coordinated by FIMECC Ltd. (Finnish
Metals and Engineering Competence Cluster) via
project Digihybrid, as well as partially funded by the
Academy of Finland via project EDiHy.
REFERENCES
Audsley, N. C., Burns, A., Richardson, M. F., and Wellings,
A. J. (1991). Hard real-time scheduling: The deadline-
monotonic approach. Proc IEEE Workshop on Real-
Time Operating Systems and Software, pages 1–6.
Buttazzo, G. C. (2011). Hard Real-Time Computing Sys-
tems. Springer US.
Chetto, H. (1994). Guaranteed deadlines with dynamic
recovery blocks in distributed systems. In Proceed-
ings: Sixth Euromicro Workshop on Real-Time Sys-
tems, 1994, pages 199–204.
Chetto, H. and Chetto, M. (1989). Some results of the earli-
est deadline scheduling algorithm. IEEE Trans. Softw.
Eng., 15(10):1261–1269.
Ding, W. and Guo, R. (2009). An effective RM-based
scheduling algorithm for fault-tolerant real-time sys-
tems. In International Conference on Computational
Science and Engineering CSE ’09, volume 2, pages
759–764.
EL Ghor, H., Chetto, M., and Chehade, R. H. (2011). A
real-time scheduling framework for embedded sys-
tems with environmental energy harvesting. Comput.
Electr. Eng., 37(4):498–510.
Han, C.-C., Shin, K. G., and Wu, J. (2003). A fault-
tolerant scheduling algorithm for real-time periodic
tasks with possible software faults. IEEE Trans. Com-
put., 52(3):362–372.
Huova, M., Ketonen, M., Alexeev, P., Bostrm, P., Linjama,
M., Waldn, M., and Sere, K. (2012). Simulations with
fault-tolerant controller software of a digital valve. In
Proceedings of the Fifth Workshop on Digital Fluid
Power - DFP12, Tampere Finland, pages 223–242.
Linjama, M., Huova, M., Bostrm, P., Laamanen, A., Si-
ivonen, L., Morel, L., Walden, M., and Vilenius, M.
(2007). Design and implementation of energy sav-
ing digital hydraulic control system. In Vilenius, J. &
Koskinen, K.T. (eds.) The Tenth Scandinavian Interna-
tional Conference on Fluid Power, May 21-23, 2007,
Tampere, Finland, SICFP’07, pages 341–359.
PECCS2013-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
194
