
Design of Focusing Catadioptric Systems using Differential Geometry
Tobias Strauß
Institute of Measurement and Control Systems, Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany
Keywords:
Optical Design, Meridional Focus, Sagittal Focus, Astigmatism, Fermat’S Principle, Differential Geometry.
Abstract:
In recent years catadioptric systems, consisting of lenses and mirrors, have gained increasing popularity for
the task of environmental perception. However, focusing of such systems is a common problem as it is often
not considered during the design process of the optical system.
This paper presents a novel approach to address focus in the design of optics with rotational symmetry. The
approach does not only adress the construction of catadioptric systems but can also be used to calculate con-
ventional optics. The approach is based on the calculation of the first order approximation of meridional and
sagittal focus using differential geometry. Additional conditions like a single-viewpoint can be considered as
well. The derived equations are combined to a set of ordinary differential equations that is used to calculate the
shape of the optical system via numerical integration. The design concept has been verified by multi-chromatic
ray tracing simulations.
1 INTRODUCTION
In the field of computer vision, environmental percep-
tion is an important task. For this, the possibility to
capture a large field of view is often desirable. This
can be performed using either ultra-wide-angle lenses
or catadioptric systems consisting of both, lenses and
mirrors (Benosman and Kang, 2001). For the task
of capturing 360
◦
panoramic images catadioptric sys-
tems are more advantageous as their field of view can
be influenced in a wider range.
However, a big problem of today’s catadioptric
systems is their focusing as this is not considered dur-
ing system design. Instead common designs only deal
with the geometric mapping that describes the rela-
tion between image points and corresponding lines of
sight (Hicks and Bajcsy, 2000; St¨urzl and Srinivasan,
2010).
Neglecting wave effects, the light transport
through an optical system can be described using light
rays (Malacara and Malacara, 2003). The geometric
mapping is defined by the principal rays which pass
through the center of the aperture.
To adress focusing we have to deal with beams
of rays. The rays of a single beam can be character-
ized as meridional, sagittal or skew. For systems with
rotational symmetry, the rays that lie in the meridio-
nal plane spanned by the principal ray and the opti-
cal axis are called meridional rays. The sagittal rays
are the rays that propagate in the sagittal plane that
is perpendicular to the meridional plane and contains
the principal ray (see Figure 1). The sagittal plane
changes whenever the principal ray is reflected or re-
fracted. Rays that are neither meridional nor sagittal
are called skew.
In general the focus of the meridional rays differs
from that of the sagittal rays and hence not all rays of
a beam focus in one single point. This effect is called
astigmatism (see Figure 2).
Baker and Nayar introduce the problem of defo-
cus blur for catadioptric systems (Baker and Nayar,
1999). Swaminathan uses caustics to describe the fo-
cus (Swaminathan, 2007). However both approaches
only deal with meridional focusing, leaving the sagit-
tal focusing disregarded. Furthermore, the results are
not used in a constructive way to improve the shape
of the optic.
This paper presents an analytical way to calculate
both meridional and sagittal focusing in a first order
approximation using differential geometry and Fer-
mat’s principle.
A common approachwhen designing conventionalop-
tical systems is to use an iterative scheme of ray trac-
ing simulations (Glassner, 1989) followed by draft rat-
ing using a so called merit function. In doing so, an
initial system draft can be optimized until a minimum
of the merit function has been found (Smith, 2004).
However, this approach is time-consuming and the
84
Strauß T..
Design of Focusing Catadioptric Systems using Differential Geometry.
DOI: 10.5220/0004295300840089
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 84-89
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
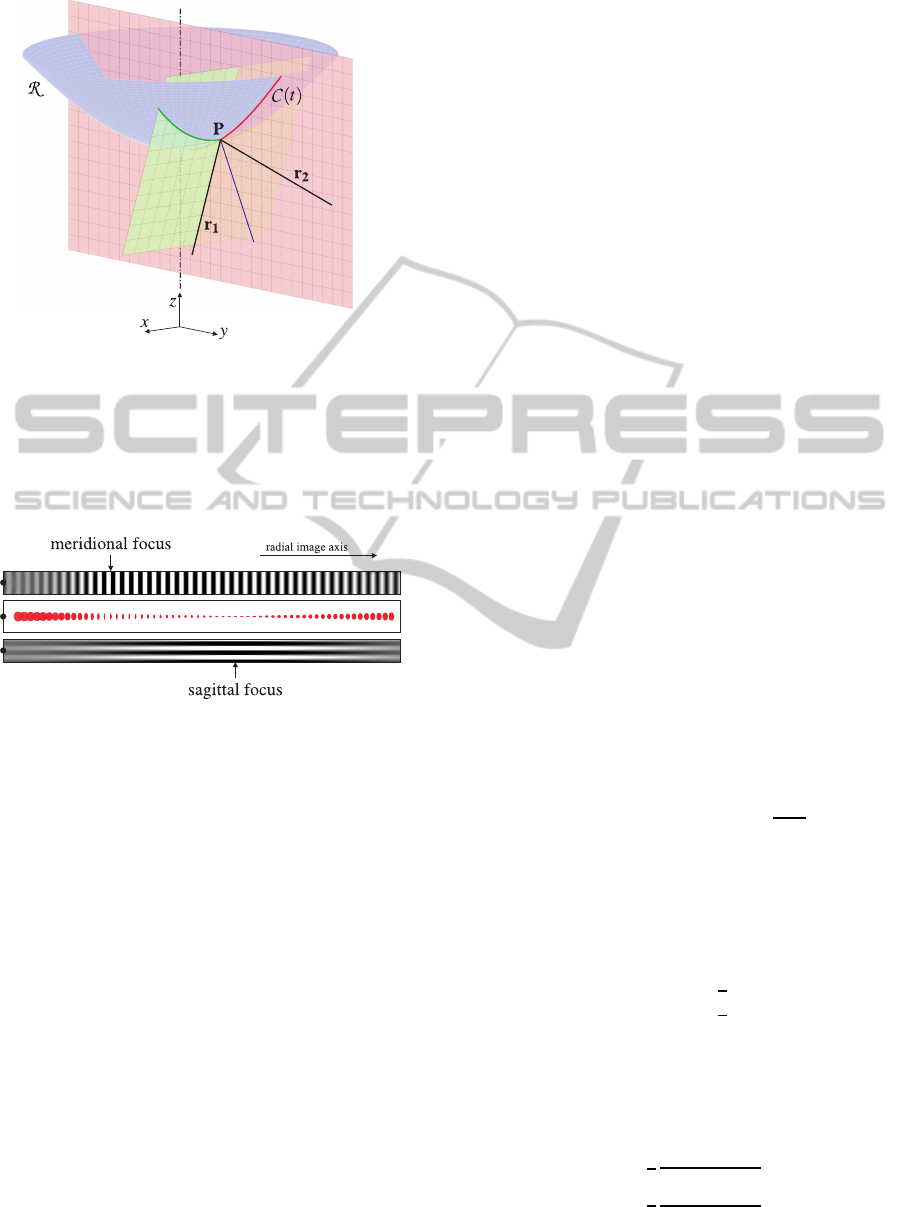
Figure 1: Reflection of a principal ray (black) at a surface
of revolution R (blue) obtained by rotating a curve C (t)
around the z-axis. r
1
and r
2
denote the direction vector of
the incident and reflected ray. The surface’s normal vector
at the intersection point P is colored blue. The red plane is
the meridional plane and one of the sagittal planes is shown
in green. The red and green curve are the corresponding
meridional and sagittal intersection curve respectively.
Figure 2: Simulated defocus blur of a single mirror optic
attached to a conventional lens optic. The black dot in each
sub-image marks the image center. The middle plot shows
spots of several beams of rays along the radial image axis
that can be understood as blur kernels dependent on the po-
sition. Related sample images with vertical and horizontal
stripes visualize the defocus blur. At the meridional focus
point the rays of one beam focus in radial direction, at the
sagittal focus point they focus in circumferential direction.
quality of the optimal draft depends on the number
of parameters used to describe the surfaces.
This paper presents a novel approach to design fo-
cusing optics that directly uses the analytical descrip-
tion of meridional and sagittal focus. In addition, re-
lations for the geometric mapping can be considered -
for example to ensure a single-viewpoint which is es-
sential to be able to remap the image to other projec-
tion models without knowledge about the scene depth.
All equations are combined to a system of ordinary
differential equations describing the shape of the opti-
cal system. This ODE system can be solved quickly
via numerical integration using standard methods like
the Runge-Kutta methods without the need of ray trac-
ing.
2 DESCRIPTION OF FOCUSING
AT BOUNDING SURFACES
The analytical description of focusing at refracting
and reflecting surfaces (referred to as bounding sur-
faces) is a central point of this paper. This section
shows how the focusing characteristic of a beam of
rays can be calculated using Fermat’s principle. A
first order approximation of a beam’s focusing char-
acteristic is given by its meridional and sagittal fo-
cus point. These focus points describe where rays
focus that propagate within the meridional plane and
sagittal plane respectively. They can be calculated in
closed form using the intersection curve of surface
and corresponding plane (see Figure 1).
2.1 Intersection of Bounding Surface
and Meridional/Sagittal Plane
In the following, we examine a surface of revolution
R which is defined by rotating a curve
C (t) = (0, ρ(t), ζ(t))
T
(1)
around the z-axis (optical axis). To calculate the fo-
cusing induced by surface R using Fermat’s princi-
ple, we need its intersection curves with meridional
and sagittal plane. Without loss of generality we can
assume x = 0 for the meridional plane. The intersec-
tion point of a principal ray and surface R can be ex-
pressed as P = C (τ). The normalized direction vec-
tors of the incident and refracted principal ray at this
point P are defined as r
1
= (0, r
1y
, r
1z
)
T
and r
2
=
(0, r
2y
, r
2z
)
T
respectively. In the following, deriva-
tives with respect to a certain parameter are marked
with this parameter as a subscript, arguments are omit-
ted for the sake of legibility, e.g. ρ
t
:=
∂ρ(t)
∂t
t=τ
.
At each intersection point P we can define the me-
ridional intersection curve and the sagittal intersec-
tion curve. The meridional intersection curve is equiv-
alent to the curve C (t) itself. Its second order Taylor
approximation at P with curve parameter u is given as
M (u) = P+
0
ρ
t
u+
1
2
ρ
tt
u
2
ζ
t
u+
1
2
ζ
tt
u
2
. (2)
The second order Taylor approximation of the sagittal
intersection curve can be calculated using its mirror
symmetry to the meridional plane and the Taylor se-
ries of C (t) at the intersection point. This yields:
S (u) = P+
u
1
2
r
1y
ζ
t
ρ
(
r
1z
ρ
t
−r
1y
ζ
t
)
u
2
1
2
r
1z
ζ
t
ρ
(
r
1z
ρ
t
−r
1y
ζ
t
)
u
2
. (3)
A detailed derivation is omitted due to lack of space.
DesignofFocusingCatadioptricSystemsusingDifferentialGeometry
85
2.2 Determination of Focus
Given the meridional and sagittal intersection curves,
the corresponding focus points can be calculated us-
ing the laws of geometrical optics. Fermat’s principle
is a compact formulation of these laws which states
that rays of light traverse the path of stationary opti-
cal path length (Hecht, 2001). The optical path length
is defined as the product of geometrical length and re-
fractive index of the surrounding medium.
In a first order approximation a beam of meridio-
nal rays neighboring the principal ray focuses in one
point. This point is called the meridional focus point
and lies on the straight line given by the principal ray.
In an equivalent way a beam of sagittal rays focuses
in the sagittal focus point. Thus, given the principal
ray, the focus points can be expressed in terms of their
distances to the surface.
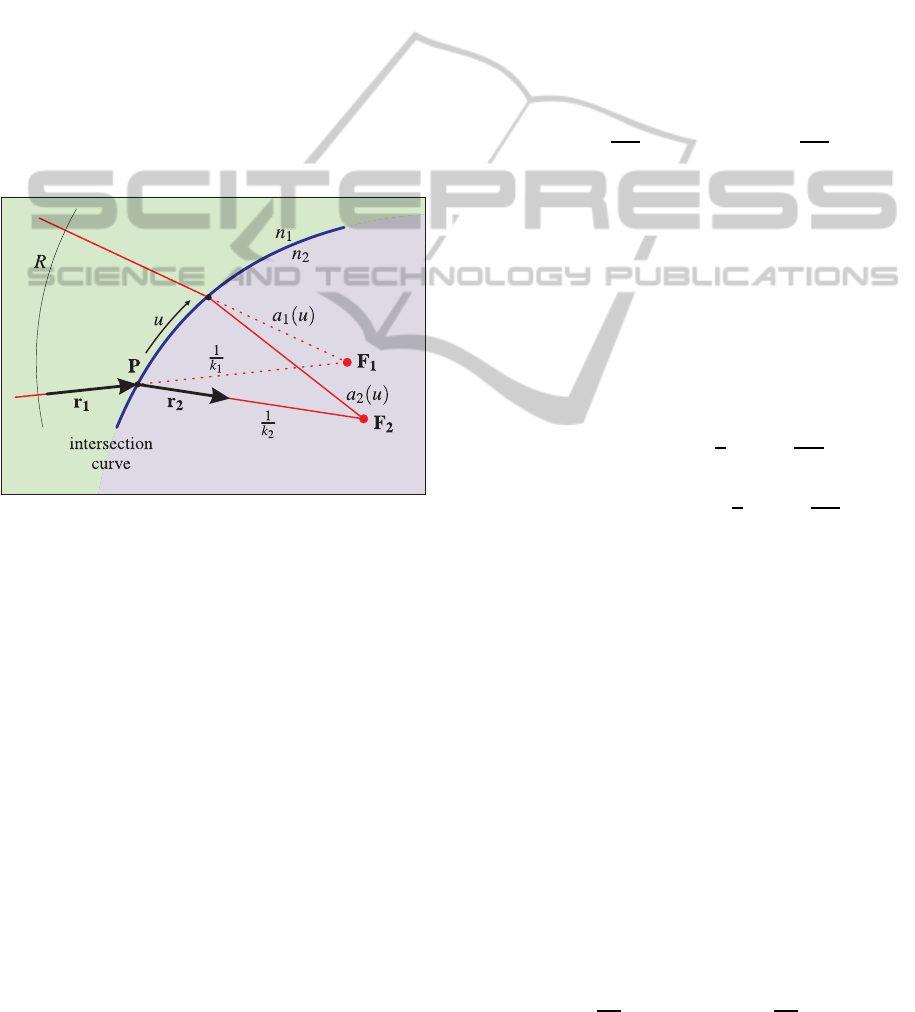
Figure 3: Sketch of the geometric relations used for the ap-
plication of Fermat’s principle. The sketch shows the planar
meridional case. When dealing with sagittal focus, the rays
do not lie within a plane and the problem has to be handled
in 3-dimensional space.
To obtain a description that is also adequate for pa-
rallel rays (intersecting at infinity), we use the inverse
Euclidean distance k between surface and focus point
(see Figure 3). Applying Fermat’s principle the value
of k can be calculated depending on surface curvature
and refractive indices of the adjoining media.
Under the assumption that the incident rays focus
in the virtual focus point F
1
, they must all have the
same phase (in terms of wave optics) at a circle of ar-
bitrary radius R around F
1
. Hence it is sufficient to
examine the optical path length between the intersec-
tion with such a circle and the focus point F
2
. This
optical path length can be written as
w(u) = n
1
[R− a
1
(u)] + n
2
a
2
(u) (4)
with the refractive indices n
1
and n
2
as well as the geo-
metric distances a
1
(u) and a
2
(u).
For the principal ray to pass though point F
2
, Fer-
mat’s principle says that the corresponding optical
path length must be stationary, so
w
u
|
u=0
!
= 0. (5)
For the neighboring rays to pass through point F
2
, ad-
ditionally condition (5) must be satisfied in a small
neighborhood which is equivalent to
w
uu
|
u=0
!
= 0 (6)
2.2.1 Meridional Focus
As the meridional focus points F
1m
and F
2m
lie on the
principal ray, their positions can be expressed as
F
1m
= P+
1
k
1m
r
1
and F
2m
= P+
1
k
2m
r
2
(7)
with k
1m
and k
2m
denoting their inverse Euclidean dis-
tance to the intersection point.
Given the local quadratic approximation of the
meridional intersection curve M (u) the optical path
length for the neighboring meridional rays can be
written as
w(u) = n
1
R− n
1
M (u) − F
1m
(8)
+ n
2
M (u) − F
2m
,
where |.| denotes the Euclidean norm, i.e.:
M (u) − F
1m
2
=
ρ
t
u+
1
2
ρ
tt
u
2
−
r
1y
k
1m
2
(9)
+
ζ
t
u+
1
2
ζ
tt
u
2
−
r
1z
k
1m
2
With (7) the focus points lie on the principal ray. As
the principal ray fulfills the laws of geometric optic
condition (5) is satisfied by definition. To satisfy con-
dition (6) we have to evaluate the second order deriva-
tive of (8) with respect to u at u = 0. After some
longer arithmetic computation this yields:
n
1
h
k
1m
(ρ
t
r
1z
− ζ
t
r
1y
)
2
− (ρ
tt
r
1y
+ ζ
tt
r
1z
)
i
(10)
− n
2
h
k
2m
(ρ
t
r
2z
− ζ
t
r
2y
)
2
− (ρ
tt
r
2y
+ ζ
tt
r
2z
)
i
!
= 0.
This description of meridional focus is equivalent to
the one gained using caustics (Swaminathan, 2007).
2.2.2 Sagittal Focus
As in the meridional case the sagittal focus points F
1s
and F
2s
lie on the principal ray. With the inverse Eu-
clidean distances k
1s
and k
2s
their position can be ex-
pressed as
F
1s
= P+
1
k
1s
r
1
and F
2s
= P+
1
k
2s
r
2
. (11)
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
86
Given the local quadratic approximation of the sagit-
tal intersection curve S (u), the optical path length for
the neighboring sagittal rays can be expressed equiva-
lent to (8). With the sagittal plane spanned by r
1
and
e
x
condition (6) yields:
n
1
ζ
t
ρ(r
1z
ρ
t
− r
1y
ζ
t
)
− k
1s
(12)
− n
2
ζ
t
(r
1y
r
2y
+ r
1z
r
2z
)
ρ(r
1z
ρ
t
− r
1y
ζ
t
)
− k
2s
!
= 0.
A full derivation is omitted due to lack of space. If we
use the sagittal plane spanned by r
2
and e
x
to calculate
the intersection curve and focusing, we get:
n
1
ζ
t
(r
1y
r
2y
+ r
1z
r
2z
)
ρ(r
2z
ρ
t
− r
2y
ζ
t
)
− k
1s
(13)
− n
2
ζ
t
ρ(r
2z
ρ
t
− r
2y
ζ
t
)
− k
2s
!
= 0.
Using the law of geometrical optics, the equations
(12) and (13) can be converted into each other by
some arithmetic computation.
Note that ρ
tt
and ζ
tt
do not influence the sagittal
focusing directly, but only its change dependent on t.
3 CONSTRUCTION SCHEME
FOR OPTICAL SYSTEMS
The analytical description of the change of focus in-
duced by a bounding surface given by (10) and (12)
will now be used to design optical systems.
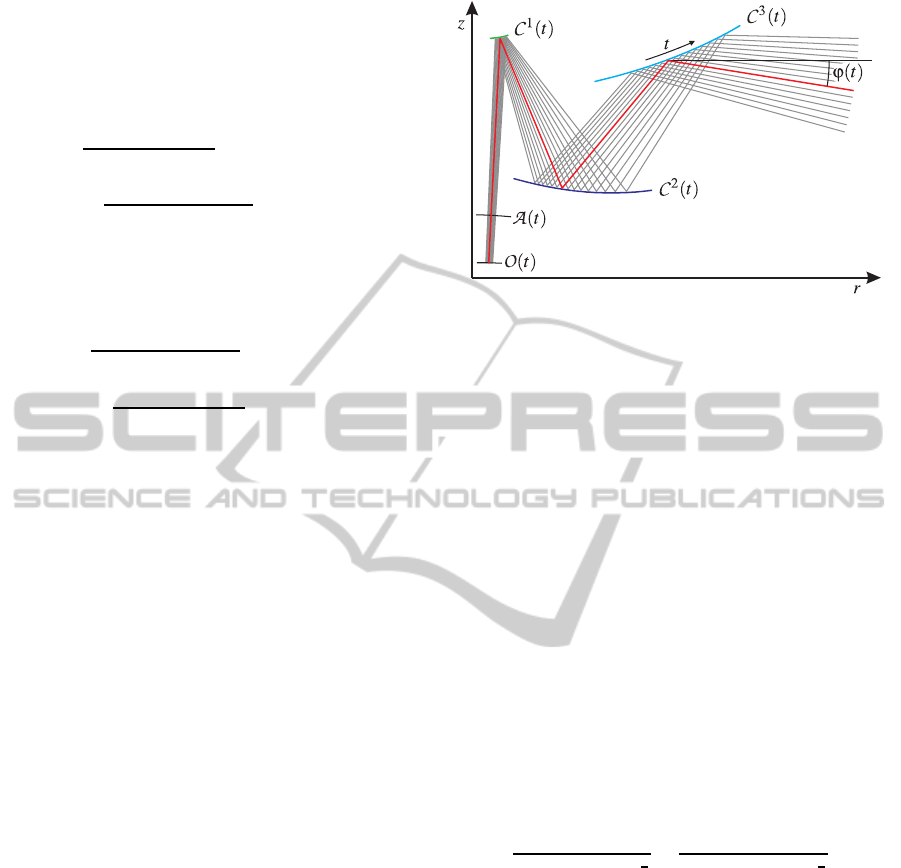
3.1 Parametric Description
In analogy to the last section, systems with rotational
symmetry can be described with a set of planar curves
C
i
(t
i
) with i = 1...N corresponding to N bounding
surfaces. One can choose a parametrization with a
common curve parameter t for all curves C
i
that is de-
fined in a way that a certain value of t is related to a
certain principal ray (see Figure 4). Such a parame-
terization is the basic step to describe the shape of an
optical system using differential equations.
The parameterization gets unique by the definition
of the incident principal rays. Here we use two planar
curves O (t) and A (t), where the rays emanate from
O (t) and pass through A (t).
To ensure the validity of parameterization the tan-
gent vectors C
i
t
(t) have to be chosen according to
laws of geometrical optics. Each tangent vector de-
pends only on the direction vectors of incident and
reflected/refracted ray at the corresponding bounding
Figure 4: A set of planar curves C
i
(t) can be used to de-
scribe the shape of an optical system with rotational sym-
metry. The curves O (t) and A (t) are used to describe the
incident principal rays. ϕ(t) denotes the exit angle of the
principal rays.
surface. With functions g
i
(t) and h
i
(t) dependent on
preceding, current and subsequent intersection point
and scaling functions p
i
(t) we can write the tangent
vectors C
i
t
(t) as
C
i
t
(t) = (0, ρ
i
t
, ζ
i
t
)
T
= p
i
· (0, g
i
, h
i
)
T
. (14)
To determine the meridional intersection curve (2) we
need to know the second order derivative of C
i
(t) with
respect to t. If we derive (14) w.r.t. t, we get:
C
i
tt
(t) =
0
ρ
i
tt
ζ
i
tt
=
0
p
i
t
g
i
+ p
i
g
i
t
p
i
t
h
i
+ p
i
h
i
t
. (15)
From a physical point of view, it is obvious that focus-
ing is directly related to the curvature κ
i
(t). With (14)
and (15) the curvature can be written as:
κ
i
=
ρ
i
t
ζ
i
tt
− ρ
i
tt
ζ
i
t
h
ρ
i
t
2
+
ζ
i
t
2
i
3
2
=
g
i
h
i
t
− h
i
g
i
t
p
i
h
(g
i
)
2
+ (h
i
)
2
i
3
2
. (16)
So in fact, the curvature is independent on p
i
t
and we
can set it to zero in (15). Note that g
i
t
and h
i
t
are de-
pendent on p
j
(t), with j ∈ {i− 1,i, i+ 1}.
The scaling function p
1
(t) is related to the curva-
ture of curve A (t) and hence cannot be chosen freely.
The functions g
N
and h
N
are related to the principal
ray’s exit angle ϕ(t) and hence κ
N
is influenced by
ϕ
t
(t) as well. In summary, we now have a consistent
description of a set of parametrized curves C
i
(t) with
common parameter t describing the path of the princi-
pal rays and a parameter vector
p(t) = (p
2
, . .., p
N
,ϕ
t
) (17)
that influences the curvatures κ
i
at every position t.
DesignofFocusingCatadioptricSystemsusingDifferentialGeometry
87

3.2 Propagation of Focusing Parameters
With (10) and (12) we are able to calculate the change
of focusing at a single bounding surface. As the para-
meters k
m
and k
s
are defined relative to a certain inter-
section point P
i
they have to be remapped to the next
intersection point P
i+1
before applying these equa-
tions for the next surface. In the following k
+
denotes
the position of a focus point (meridional or sagittal)
after this remapping. With the Euclidean distance s
between the two reference points the propagation rule
for the focus point description is:
1
k
+
=
1
k
− s. (18)
In order to propagate the change of sagittal focus-
ing dependent on t, which is influenced by the sur-
faces’ curvatures, we need the first order Taylor ap-
proximation of (18). With the linear approximations
k(t) ≈ k
0
+ k
t
t and s(t) ≈ s
0
+ s
t
t we get:
k
+
(t) ≈ k
+
0
+ k
+
t
t =
k
0
1− s
0
k
0
+
k
t
+ s
t
k
0
2
(1− s
0
k
0
)
2
t. (19)
In an alternating manner of calculation of focusing
at a bounding surface and propagation of the corre-
sponding parameters to the next surface, we can cal-
culate the object sided focusing parameters k
m
, k
s
and
k
s,t
. As already mentioned, k
s
cannot be influenced
directly via the surfaces’ curvatures.
If we want to focus to infinity, we have to satisfy
k
m
!
= 0 and k
s,t
!
= 0 (20)
and in addition initially ensure that k
s
= 0.
3.3 Single-viewpoint Condition
Additional conditions can be satisfied if the optical
system design has enough degrees of freedom. For
example we can demand a single-viewpoint, which
means that all object sided principal rays intersect in
one point V = (0, 0, v)
T
on the optical axis. A single-
viewpoint is necessary if we want to remap a captured
image to other projection models like the cylindrical
projection without knowledge of scene depth. In or-
der to satisfy the single-viewpoint condition, the exit
angle ϕ(t) must satisfy
ϕ(t) = arctan
ζ
N
− v
ρ
N
. (21)
So we have to demand
ϕ
t
(t) −
ρ
N
ζ
N
t
− (ζ
N
− v)ρ
N
t
(ρ
N
)
2
+ (ζ
N
− v)
2
!
= 0. (22)
3.4 Combined Root Finding Problem
With (20) and (22) we have three root finding prob-
lems that share a common parameter vector (17). The
task of finding the corresponding parameter vector
can be formulated as a multi-dimensional nonlinear
least squares problem. To do so, we simply sum
up the squared conditions. Such a nonlinear least
squares problem can be solved using the Levenberg-
Marquardt algorithm. Starting with an initial guess,
this algorithm combines the Gauss-Newton algorithm
with gradient descent to robustly find a local mini-
mum. This local minimum should also be the global
minimum with a sum of squared errors equal to zero.
If the value at the local minimum is non-zero the ini-
tial root finding problem was not solved properly and
we have not found a valid solution.
In general there exists more than one global mini-
mum. A different minimum corresponds to a different
shape of the final system and often comes along with
a flipped inside-outside characteristic.
3.5 Final ODE System
The parameter vector (17) and the equations (14) and
(22) define a set of differential equations for ρ
i
, ζ
i
and ϕ (i = 2...N). Given appropriate initial values,
this system of ordinary differential equations can be
solved via numerical integration with standard meth-
ods like the Runge-Kutta methods.
It has to be mentioned that a valid solution can-
not be found for all sets of initial values. Sometimes
it is simply not possible to satisfy the conditions or
the solution’s range of validity is not sufficiently large.
However, for appropriate initial values the calculation
of the optical system is very fast.
4 SIMULATION RESULTS
In the last section we presented a construction scheme
for optical systems that directly considers meridional
and sagittal focus as well as a single-viewpoint. This
sections shows ray tracing results for a system draft
that was calculated using this scheme. Ray tracing
was performed using the spline interpolated numeri-
cal ODE solution. Material characteristics leading to
the chromatic dispersion are considered as well.
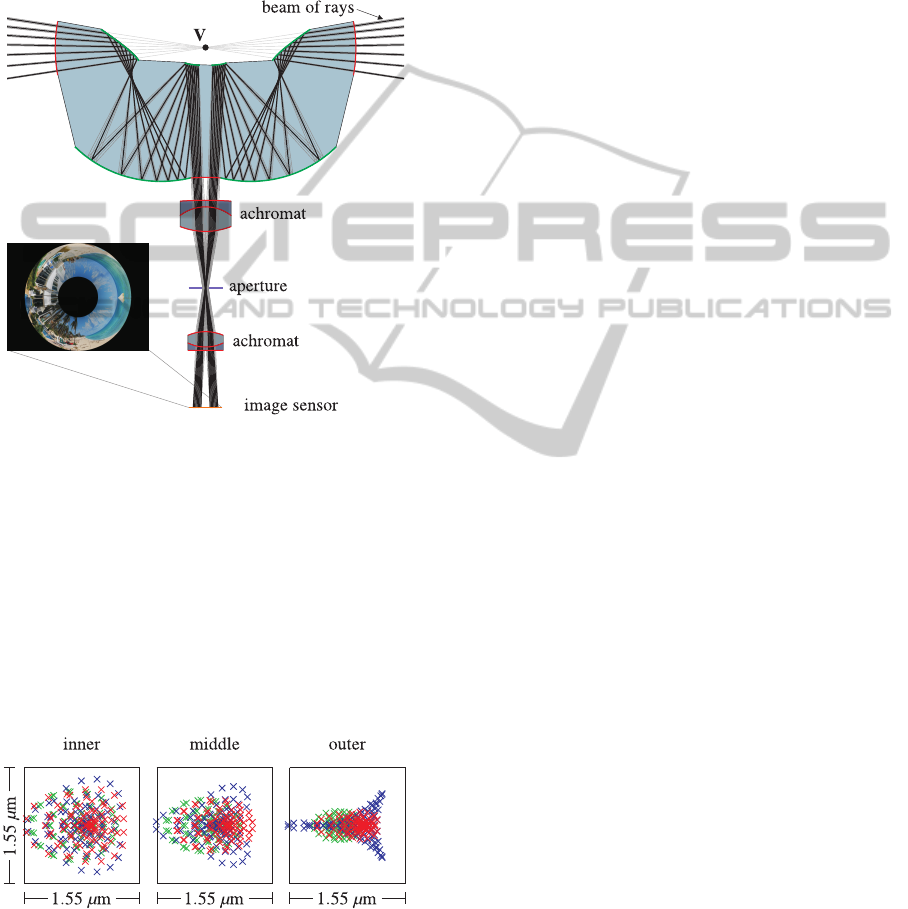
As the construction scheme currently does not
consider chromatic aberration we limited the refract-
ing entry and exit surface in a way that the princi-
pal rays traverse these perpendicularly. To bundle the
beams of rays on the image sensor we use two stan-
dard achromatic lenses (see Figure 5).
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
88
An additional aperture controls the amount of in-
coming light and higher order defocus blur.
The optical system was calculated for a 1/2.5”
sensor with 8.8 MP. This sensor has a pixel pitch of
1.55 µm. The partially mirrored main lens has a diam-
eter of approximately 55 mm and was calculated to be
manufactured from PMMA. The vertical field of view
is approximately 17
◦
.
Figure 5: Optical design consisting of two standard achro-
matic lenses, an aperture and a mirror lens. The shape of
the partially mirrored main lens was calculated using the
presented design approach. Reflecting surfaces are colored
green, refracting surfaces red. The principal ray of each
beam of rays is shown in black, the other corresponding me-
ridional rays are shown in gray color. All incident principal
rays intersect in the single-viewpoint V.
Figure 6 shows the simulated defocus blur and
chromatic aberration at different radial sensor posi-
tions. The spot sizes using an aperture diameter of
1 mm are even below the very small pixel size of
1.55×1.55 µm and let us expect a sharp image.
Figure 6: Simulated defocus blur of inner, middle and outer
beams of rays relating to the image radius. Raytracing
was performed for wavelengths of 500 nm (blue), 550 nm
(green) and 650 nm (red). The colored crosses in each sub-
plot show the sensor positions of different rays emanating
from single object points at infinity.
5 SUMMARY
AND CONCLUSIONS
In this paper we presented a novel approach to de-
sign focusing optics based on differential geometry.
For this, an analytical description of meridional and
sagittal focusing was derived using Fermat’s princi-
ple. The approach considers focusing as well as ge-
ometric constraints. These are combined to a multi-
dimensional root finding problem, whose solution is
found using the Levenberg-Marquardt algorithm. In
an iterative manner of solving the root finding prob-
lem and numerical integration the shape of the optical
system is calculated.
A big advantage of this design approach compared
to common approaches based on numerical parameter
optimization is that the shape of the bounding surfaces
is not restricted by a fixed number of parameters used
to describe them.
An exemplary optical draft was analyzed by
means of a multi-chromatic ray tracing simulation.
Future research will focus on the consideration
of chromatic effects arising from refracting surfaces.
This would overcome the limitation that refracting
surfaces have to be traversed perpendicularly to avoid
chromatic aberration.
ACKNOWLEDGEMENTS
The author would like to thank the Hans L. Merkle
Foundation for funding this work.
REFERENCES
Baker, S. and Nayar, S. K. (1999). A theory of single-
viewpoint catadioptric image formation. International
Journal of Computer Vision, Vol. 35.
Benosman, R. and Kang, S. B. (2001). Panoramic Vision:
Sensors, Theory, and Applications. Springer.
Glassner, A. S., editor (1989). An Introduction to Ray Trac-
ing. Academic Press.
Hecht, E. (2001). Optics. Addison Wesley.
Hicks, R. A. and Bajcsy, R. (2000). Catadioptric sensors
that approximate wide-angle perspective projections.
OMNIVIS 2000.
Malacara, D. and Malacara, Z. (2003). Handbook of Optical
Design. Marcel Dekker.
Smith, W. J. (2004). Modern Lens Design. McGraw Hill.
St¨urzl, W. and Srinivasan, M. (2010). Omnidirectional
imaging system with constant elevational gain and sin-
gle viewpoint. OMNIVIS 2010.
Swaminathan, R. (2007). Focus in catadioptric imaging sys-
tems. ICCV 2007.
DesignofFocusingCatadioptricSystemsusingDifferentialGeometry
89
