
The Case for Physics Visualization in an Animator’s Toolset
Ari Shapiro and Andrew W. Feng
Institute For Creative Technologies, University of Southern California, Los Angeles, U.S.A.
Keywords:
Physical Simulation, Character Animation.
Abstract:
By associating physical properties with a digital character’s joint and bones, we are able to visualize explicitly
a number of properties that can help animators develop high-quality animation. For example, proper ballistic
arcs can be shown to demonstrate proper timing and location of a character during flight. In addition, a
center of mass that accurately reflects the posture of the character can be shown to help with a balanced
appearance during walking or running. In addition, motion properties not previously considered, such as
angular momentum, can be easily identified when blatantly violated by an animator. However, very few in-
house or commercial system employ such tools, despite their nearly transparent use in an animator’s workflow
and their utility in generating better-quality motion. In this paper, we argue the case for incorporating such
toolset, describe an algorithm for implementing the tools, and detail that types of uses for such a tool.
1 MOTIVATION
Techniques for animating characters in both visual ef-
fects and fully digital features have seen only incre-
mental improvement in the recent past. While high
quality motion, such as that generated via motion cap-
ture, can be used under limited circumstances, much
character animation is still created through hand-
constuction by animators, often using video or motion
capture as reference. The resulting motion quality
of character animation varies greatly according to the
skill of the artist; expert animators can produce high-
quality motion, while novice animators often produce
low-quality motion. The tools traditionally used for
generating character animation have changed very lit-
tle; curve editors, key-framing capabilities and in-
verse kinematics chains. Many animation passes are
required in order to convincingly animate the proper
parts of the character with increasing amounts of de-
tail. These traditional tools are focussed on kinematic
movement; movement of a character in space over
time, and generally do not restrict the ability of the
animator to create any arbitrary movement, even non-
physical ones. The flexibility of these animation tools
make it quite easy for even a non-skilled user to pro-
duce some kind of character movement, albeit low in
quality. The high quality character animation seen
in visual effects and 3D scenes is produced through
painstaking efforts of coordinating movements of the
character’s joints by restricting such movements to
those that appear natural or appropriate the scene.
In fact, great efforts are spent to make characters
appear balanced in their poses, fluid in their move-
ments, and to demonstrate an implied sense of mass.
Many seminal animation principles such as squash-
and-stretch, anticipation and follow-through are in-
tended to guide animators towards generating motion
that loosely obeys the laws of physics, since doing
so has been shown to produce more pleasing anima-
tion results. Oddly, very few of such tool sets have
attempted to incorporate physical parameters explic-
itly, such as body masses, moments of inertia. By
including these physical parameters into an anima-
tor’s toolset, an animator can get explicit feedback to-
wards generating motion that better adheres to the ba-
sic principles of animation. For example, consider the
following exerpt from Richard Williams’ ”The An-
imator’s Survival Kit” p. 36 (Williams, 2009)when
explaining the principle of spacing by using a bounc-
ing ball:
”The ball overlaps itself when it’s at the slow part
of the arc, but when it drops fast, it’s spaced further
apart. That’s the spacing. The spacing is how close or
far apart those clusters are. That’s it. It’s simple, but
it’s important. The spacing is the tricky part. Good
animation spacing is a rare commodity.”
Here Williams points out that it is difficult to do
spacing well through traditional hand-drawing meth-
ods. Likewise, it is also difficult, although can be
done more quickly with kinematic toolsets. With-
247
Shapiro A. and W. Feng A..
The Case for Physics Visualization in an Animator’s Toolset.
DOI: 10.5220/0004273702470253
In Proceedings of the International Conference on Computer Graphics Theory and Applications and International Conference on Information
Visualization Theory and Applications (GRAPP-2013), pages 247-253
ISBN: 978-989-8565-46-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Visualization of physical properties of a digital
character. Shown in blue is the original path generated by
an animator. Shown in red is the path generated by the tools
after consider the mass and moment of inertia of the char-
acter. Note that the timing (knots) and the path are visibly
different from each other. By incoporating such visualiza-
tion tools into an animator’s workflow, better coherence be-
tween animations can be achieved, in addition to creating
more plausible motions.
Figure 2: Timing during a jump. Here a monkey jumps
up and down on a giant octopus. The blue line indicates
the original path and timing from the animator. The red
line indicates the proper timing according to physics. The
middle image shows the maximum height of the monkey
during the jump timed according to physics and gravity. The
bottom image shows the maximum height of the monkey as
determined by the animator. Note that the poses created
by the animator remain intact and are not changed by the
physics tools, thus preserving the level of control for the
animator.
out incorporating dynamical information, the anima-
tor would not know either the exact center of mass,
nor the effect of gravity on the ball. The absence
of explicit physical parameters forces the animator to
guess the effect of physics on a character.
2 BACKGROUND
Applying physics to synthesize character animation
is an ongoing research area for computer graphics,
and in recent years has achieved interesting results
(Ye and Liu, 2012; Coros et al., 2011). These tech-
niques vary from creating dynamic control mecha-
nism (Wang et al., 2012; Mordatch et al., 2010),
to using optimization (Liu, 2009; Mordatch et al.,
2012; Jain et al., 2009; McCann et al., 2006), to
machine learning (Levine et al., 2012; Wang et al.,
2008) and even sketching interfaces (Popovi´c et al.,
2003). However, the overall motion quality of such
techniques falls well below the threshold needed for
visual effects or feature films. In fact, even motion
capture data is frequently not used directly in feature
films since the timing and positioning of each shot is
specific and subject to the whim of the director or an-
imation lead. Instead, such motion clips are used as a
visual reference, then replicated by an animator digi-
tally. In addition, generating physically valid charac-
ter motion typically requires setting many unintuitive
parameters, as the impact of such settings has a global
effect on the final simulation.
In addition, the process of creating animation is
a creative process with a history extending long be-
fore the advent of the digital pipeline. Animators are
trained on a traditional 3D pipeline and toolset, and
changes to such a workflow are not easily accepted.
Even when a new method could be used in place of
traditional animation method, there can be resistance
from animators to changing their pipeline unless the
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
248

results both clearly superior and simultaneously re-
quire little or no change in their workflow. Thus the
integration into a production pipeline is as important
a factor as is the method itself. An animator requires
a non-invasive tool that does not change his creative
process while providing him enough control over the
final outcome. Tight communication between the tool
creators and the users are essential for the tool to be
useful for an animator’s creative process.
Indeed, the animation phase typically runs in a
contrary fashion to the other pipeline phases. For
example, when lighting a scene, the normal lighting
equations would be applied which are roughly based
on physical phenomenae, then later altered to achieve
specific lighting effects. Thus lighting starts from be-
ing realistic, then changes (perhaps becoming less re-
alistic or less physically-based) to accommodate the
needs of the scene. The same goes for other types
of simulation; a rigid body simulation will be run us-
ing normal physical settings (such as earth-like grav-
ity and non-penetration constraints) and then altered
according to the needs of the scene, perhaps satisfy-
ing fewer physical phenomenae. Even modellers will
start with a scan and texture of a real object, then alter
that object for its specific use in the shot. By con-
trast, an animator will start from a non-moving char-
acter, then perform rough animation, then slowly re-
fine the animation until it is acceptable for the shot.
Thus, unlike the other pipeline steps, animation starts
from an unrealistic form, and then is fashioned to be-
come more realistic. The effect is that models, par-
ticle effects, lights, backgrounds and other static as-
pects of digital or digitally enhanced scenes can look
highly realistic, yet cartoony,non-plausible animation
is readily identified on the characters in the scene and
a pervasive aspect of modern digitially produced re-
sults.
To our knowledge, very few efforts have been
done to integrate simulation tools into an animator’s
pipeline to help an animator produce physically real-
istic motions.
3 IMPLEMENTATION OF
PHYSICS VISUALIZATION
INTO AN ANIMATOR’S
WORKFLOW
To implement a physics-based visualization, each of
the character’s joints must be associated with three
additional properties that are not typically present in
most character rigs; mass, moment of inertia and den-
sity. Many character rigs include a rigid skinning, as
opposed to a smooth skinning, where each joint is as-
sociated with a polygonal geometry. By using such a
rig, the calculation of physical properties can be auto-
mated:
• Determine the volume of the polygonal shape
• Determine the mass of the joint/bone by multiply-
ing the density by the volume calculated in Step
1
• Determine the moment of inertia by sampling the
polygonal object
Note that while this automated method will gener-
ate values for each joint, some adjustments will need
to be made, particularly if the size of the polygonal
geometry associated with each joint is out of propor-
tion with the character’s true dimensions. For ex-
ample, cartoon-like characters can often have large
heads, and assuming that the entire polygonal struc-
ture is of uniform density can yield exagerated re-
sults. Such exaggerations can be determined by ob-
serving the final center of mass. A large head will
cause the center of mass to be very high up the char-
acter’s body. Similarly, misproportioned limbs can re-
sult in a wildly varying center of mass during move-
ment. In most cases, adjusting the density of each
joint can bring the relative values of each body part in
better balance with each other.
Details of implementing visualizations of linear
and angular momentum can be found in (Shapiro and
Lee, 2011).
4 ADVANTAGES OF PHYSICS
VISUALIZATION
By incorporating dynamics-based parameters into an
animator’s toolset, new insight is gained into proper
ballistic arcs, conservation of angular momentum,
balance and scaling. This is done by associating a
joint in the skeleton hierarchy with both mass and
moment of inertia. Once such parameters have been
added to a character, the following visualizations can
be seen explicitly by the animator:
1) Proper arcs during flight. The law of conser-
vation of linear momentum implies that all objects
moving through space will fall according to gravity
and their initial velocities, assuming no other forces
affect them in flight. Thus, accurate ballistic paths for
both simple objects, such as balls, or complex objects
such as characters, can be easily generated by an ani-
mator by specifying both a start and an end point. The
tool can then produce physically correct ballistic tra-
jectory through simple computation based on initial
TheCaseforPhysicsVisualizationinanAnimator'sToolset
249

Figure 3: Proper paths as dictate by physics and gravity.
(Left image) An object travels from the red sphere on the
left side to the red sphere on the right side, with each circle
represents the position of the center of mass of the object in
1/24 second increments. Note that there is only one proper
path that travels the distance in exactly one second. (Middle
image) A second path can be designed to move from the
green ball to the red ball, but it will take more time to do
so, since space and time are interconnected. (Right image)
There are an infinite number of paths that can be taken, but
each takes a different amount of time. It is not common
knowlege in the animation community that there is only one
valid time for each ballistic path.
position a, initial velocity b, and gravity g using Eq.
1.Such a tool can be used to rough an animation of
a character jumping or falling from a great height, or
the calculation can be reversed in order to determine
where a character originated from in order to land into
the foreground of a scene.
r(t) = a+ tb+
1
2
Mt
2
g (1)
2) Proper timings during flight. While the shape
of a ballistic arc can be reasonably duplicated without
physics-based tools, it is difficult to replicate proper
timing of a character’s movement along such a path.
Thus, while an animator may create a proper path for
a character to follow, the timing may be inconsistent,
or overly slow or fast for the size of the object. In fact,
the idea that space and time are interconnected, and
thus, under realistic conditions, an object has only one
time that is appropriate for a given path, is not widely
known in the animation community, see Figure 3. The
timing of a path contributes greatly to its plausible
effect. Animators have a tendency to exaggerate the
final phase of a jump or fall in order to demonstrate
the increased energy of the character during this part
of the movement. Proper timings along ballistic arcs
can be generated that properly match the energy of
the moving characters, while maintaining an energetic
appearance.
3) Proper Center of Mass. Many animation rigs
either implicitly or explicity contain a center point for
the character, meant to indicate the center of mass, or
balance point of the character. However, the true cen-
ter of mass of a character varies according its instan-
taneous pose. For example, if a character is kneeling
with his arms extended, the center of mass of such
a character is in fact outside and in front of his body.
Likewise, during some phases of a jump, a character’s
Figure 4: A character does a flip during a jump. Note that
the original animated path (blue) shows inconsistent move-
ments during the flipping motion. This is caused when the
animator refers to a static center that doesn’t adjust based
on pose changes, rather than the true center of mass. The
physics-based path produces a proper ballistic arc.
center of mass is behind the character (see Figure 5.)
Thus, a proper center of mass varies from frame to
frame, and cannot be considered to be a fixed point.
Thus, showing the center of mass of a character on
the ground in front of them can assist an animator
with balance during high-energy activities, such as
walking or running. In addition, characters can fol-
low realistic-looking paths while doing flips in the air,
see Figure 4. Without a dynamically-changing center-
of-mass, a flipping character will not follow a proper
path.
4) Proper Rotations During Flight. The law of
conservation of angular momentum implies that the
angular momentum of a rotating object will be pre-
served. Practically, this means that the sum of all ro-
tations of a character need to remain constant during
flight phases. Angular momentum can be visualized
by a line segment derived from a vector, showing both
direction and magnitude extending from the center of
mass of the character (see Figure 6.) While there is no
easy method to fix problems with angular momentum,
severe violation of the law of conservation of angu-
lar momentum can be seen through sudden changes
in the direction of the line segment, such as switch-
ing from one direction to the opposite one. Such vi-
olations frequently occur during character jumps for
the following reason; animators are trained to bring
the feet of their characters forward in preparation of
a landing, but are not trained to counterbalance the
forward movement of a character’s legs with move-
ment of the character’s arms in the opposite direc-
tion. Thus, many hand-tuned animations of jumping
character show reverses in the angular momentum of
a character during flight (see Figure 7.). Such sub-
tleties of animation are not easily discerned even by
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
250
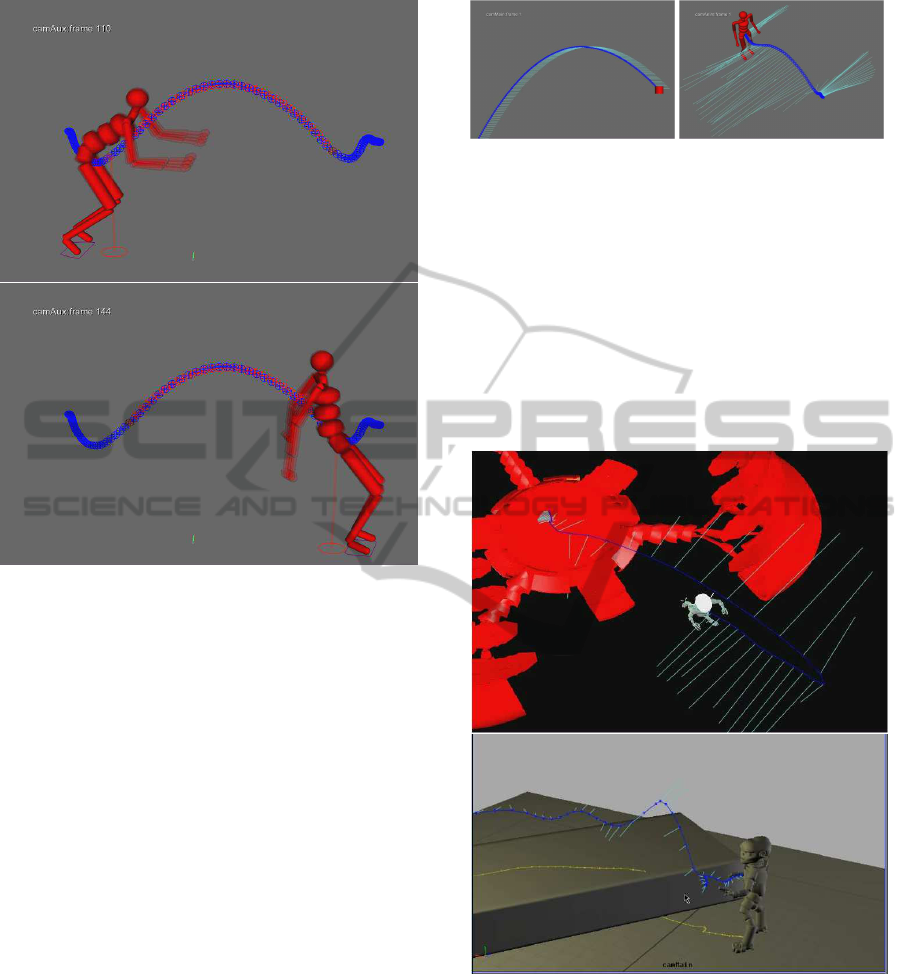
Figure 5: Visualization of a motion-captured jump. The
blue arc indicates the actual path of the characer, while the
red arc indicates the physics-based path according to the
model. (Left image) The red line projecting the the ground
represents the center of mass of the character. Notice that
during the takeoff phase, the center of mass is in front of
the character. (Right image) The character during the land-
ing phase of the jump. Notices that the center of mass is
now behind the character since most of the character’s mass
(arms, torso) are behind the character for a moment during
the last phase of the jump for another frame. This demon-
strates the dynamic nature of a character’s center of mass
that cannot be accurately represented as a fixed point on a
character rig.
highly trained animators, since such rules of physics
are not widely taught. A tool can correct the charac-
ter’s angular momentum h based on velocity v
i
, iner-
tia J
i
from each body part i, to the desired momen-
tum h
∗
by adjusting character’s global orientation at
each key frame. However, proper correction of an-
gular momentum requires a greater understanding of
strategies that humans and other animals use to orient
themselves during flight, such as windmilling arms or
other appendages like tails.
5) Proper Treatment of Character Scale. The size
of a character affects the movement of character, and
the speed of movement is used by the human mind to
determine the size of an object. Given two objects that
occupy the same amount of visual space on a screen,
we can determine which one is larger by the speed
Figure 6: (Top image) Visualization of angular momentum
for an object in flight that rotates counter clockwise. An-
gular momentum can be visualized as the blue line segment
representing the axis of rotation extending from the cen-
ter of mass of the object. Note that during the entire flight
phase of the object, the momentum remains in the same di-
rection and is the same length. This indicates that the axis
of rotation is the same, and the momentum doesn’t change.
(Bottom image) Visualization of angular momentum of a
motion-captured character during a jumping motion. Notice
that during the flight phase, the axis of rotation is generally
in the same direction. The magnitude (length) changes, but
this is due to inaccuracies in the physical modeling, and
noise during motion capture.
Figure 7: (Top image) A character is hit with a projectile
and is throw backwards onto the red machine. Notice that
near the end of the motion, the character’s axis of rotation
switches from one side to the other, indicating an impossible
in-flight rotation. Subtleties like this momentum switch can
be easily visualized by animators. (Bottom image) A char-
acter jumps onto a platform. Notice the switch in rotation
direction during flight. This particular example is caused
by failing to bring the arms down to counterbalance moving
the legs forward.
of its movement and the relative speed of movement
of nearby objects. Since gravity affects objects in a
TheCaseforPhysicsVisualizationinanAnimator'sToolset
251
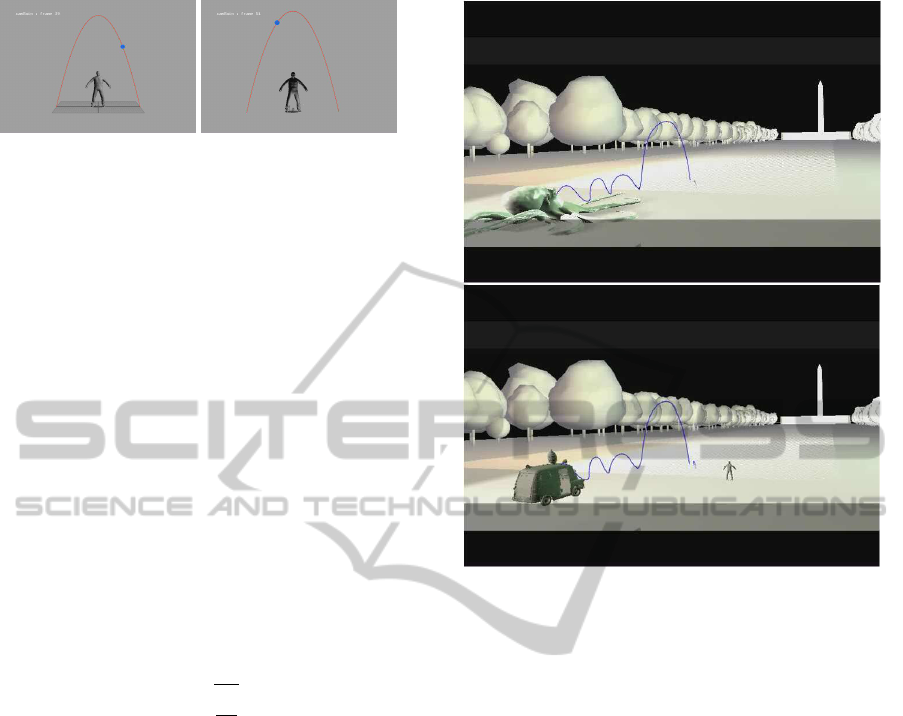
Figure 8: (Left image) A ball being thrown to the height
of 15 feet above a normal-sized person’s head, which takes
slightly more than 2 seconds to complete (Right Image) A
ball being thrown 150 feet above the head of a 60 foot giant,
which takes slightly more than 6 seconds to complete. Note
that we can determine the relative sizes of the characters by
the speed of their motion.
nonlinear way, a simple heuristic can be determined
that indicates how motion should be scaled according
to its size: square root of scale factor. Specifically,
we can determine the time t required for for an ob-
ject to travel to height h using Eq. 2. In other words,
objects that are four times as large should appear to
move twice as slowly (Pollard, 1999). The correct
treatment of the motion scale is a common pitfall for
an animator. Since animators are most familiar with
motion of a human scale, they usually produce physi-
cally incorrect motions for very large characters. The
impact of this mismatch between size and speed can
be readily seen in numerous feature films and clips
that include giant-sized characters, often moving at
the speed of normal-sized ones.
t =
s
2h
g
(2)
6) Uniform treatment of characters by numerous
animators. Live-action films and animated movies of-
ten utilize dozens of animators in parallel who often
work on the same digital characters in different shots
in order to meet the deadline of the project. Thus,
the movement of a single digital character can be in-
terpreted differently by any number of animators de-
signing their motion. While some processes are set up
in order to reach uniformity, such as dailies sessions,
these processes are often subjective. Physics-based
tools allows each shot to be annotated with various
physical paths, balance points, and momentum mark-
ers. Thus, it can become easier to evaluate the same
character across multiple shots when constructed by
different animators.
7) Synchronization of Digital Character’s With
Live Actors and Physics-Based Effects Often times,
digital characters occupy the same scene as live ac-
tors. Thus, disparities between the quality of motion
of a live actor and a digital actor can be obvious to
the viewer. Thus it is to the animator’s advantage to
understand the impact of real world physics on a live
Figure 9: A large octopus jumping 25 feet across and 15 feet
high into a pool of water. The octopus in this scene is very
large, but is animated as if it is very small, thus violating
physical plausibility. By replacing the giant octopus with a
more familiar object of the same size, the discrepency be-
tween the size of the object and the motion becomes clear
to the animator.
actor, and thus on the digital character as well. In
addition, many visual effects are generated from algo-
rithms that incorporate rules about the physical world,
such as rigid body simulations, water and particle ef-
fects, and so forth. Thus there are occassions where
maintaining a character’s physical validity is impor-
tant to the shot when combined with such effects. For
example, if a character and an object are both mov-
ing through the air, they should obey similar motion
rules.
5 DISCUSSION
The inclusion of physical parameters, such as mass
and moment of inertia into a rigged character can pro-
duce visualizations of the center of mass, linear and
angular momentum and ballistic paths. While phys-
ically valid motion does not always appear more vi-
sually appealling than non-physically valid motion,
there are many cases where it does improve the qual-
ity of perceived motion(Shapiro and Lee, 2011). In
GRAPP2013-InternationalConferenceonComputerGraphicsTheoryandApplications
252

addition, the presence of changes in rotation during
flight can be clearly seen only with the incorpora-
tion of such tools. We believe that increased aware-
ness of problems with angular momentum will re-
sult in higher-quality animations once the animation
community develops rules or guidelines for correct-
ing such problems. In addition, the advent of such
tools into an animator’s pipeline can be done inob-
trusively; a button can be pressed by the animator to
render a non-destructive path against which the cur-
rent animation is compared. The animator still retains
control over all aspects of the animation.
One argument against the use of physics-based
tools in character animation states that a film or movie
is an artistic endeavor and the presence of physically-
valid motion does not necessarily make the animation
look more visually appealling. Indeed, it is some-
times desirable to exagerate motion in order to con-
vey a particular character motion or storytelling idea.
While this is true, the ability to compare an animation
against the natural world can lead to better motion
quality quickly under certain circumstances. So while
physically realistic motion is not always needed, it is
helpful to understand it for comparison. In addition,
many classic animation texts refer heavily to physical
phenomenae, and develop rules for mimicking them,
such as squash-and-stretch, anticipation, spacing and
so forth.
The authors have noticed that animators have
expressed the greatest amount of trepidation about
physics-based visualizations when discussing charac-
ters of large scale. Physics-based examples of large
objects and creatures are generally at odds with an an-
imators sense of space and time for large objects. The
authors believe that this is due to a lack of familiarity
with large creatures (such as fifty-foot tall characters)
in the real world. We don’t see giants in this world,
and thus it is difficult to imagine what their move-
ments look like. Thus, large creatures are often ani-
mated as if they are much smaller, often human-sized.
While it is arguable what this motion should look like
from an artistic standpoint, the application of physics
reveals how such creatures would likely move were
they to exist in our world. The authors believe that the
use of such tools for large creatures will result in im-
proved quality motion once these techniques become
widespread.
REFERENCES
Coros, S., Karpathy, A., Jones, B., Reveret, L., and van de
Panne, M. (2011). Locomotion skills for simulated
quadrupeds. ACM Trans. Graph., 30(4):59:1–59:12.
Jain, S., Ye, Y., and Liu, C. K. (2009). Optimization-based
interactive motion synthesis. ACM Transaction on
Graphics, 28(1):1–10.
Levine, S., Wang, J. M., Haraux, A., Popovi´c, Z., and
Koltun, V. (2012). Continuous character control with
low-dimensional embeddings. ACM Transactions on
Graphics, 31(4):28.
Liu, C. K. (2009). Dextrous manipulation from a grasping
pose. ACM Transactions on Graphics (SIGGRAPH),
28(3).
McCann, J., Pollard, N., and Srinivasa, S. (2006). Physics-
based motion retiming. In Proceedings of the 2006
ACM SIGGRAPH/Eurographics symposium on Com-
puter animation, pages 205–214. Eurographics Asso-
ciation.
Mordatch, I., de Lasa, M., and Hertzmann, A. (2010). Ro-
bust physics-based locomotion using low-dimensional
planning. ACM Trans. Graph., 29(4):71:1–71:8.
Mordatch, I., Todorov, E., and Popovi´c, Z. (2012). Discov-
ery of complex behaviors through contact-invariant
optimization. ACM Trans. Graph., 31(4):43:1–43:8.
Pollard, N. (1999). Simple machines for scaling human mo-
tion. In In Proceedings of Computer Animation and
Simulation ’99.
Popovi´c, J., Seitz, S. M., and Erdmann, M. (2003). Motion
sketching for control of rigid-body simulations. ACM
Trans. Graph., 22(4):1034–1054.
Shapiro, A. and Lee, S.-H. (2011). Practical character
physics for animators. Computer Graphics and Ap-
plications, IEEE, 31(4):45 –55.
Wang, J. M., Fleet, D. J., and Hertzmann, A. (2008). Gaus-
sian process dynamical models for human motion.
IEEE Trans. Pattern Anal. Mach. Intell., 30(2):283–
298.
Wang, J. M., Hamner, S. R., Delp, S. L., and Koltun,
V. (2012). Optimizing locomotion controllers us-
ing biologically-based actuators and objectives. ACM
Trans. Graph., 31(4):25:1–25:11.
Williams, R. (2009). The Animator’s Survival Kit–Revised
Edition: A Manual of Methods, Principles and For-
mulas for Classical, Computer, Games, Stop Motion
and Internet Animators. Faber & Faber, Inc.
Ye, Y. and Liu, C. K. (2012). Synthesis of detailed hand
manipulations using contact sampling. ACM Trans.
Graph., 31(4):41:1–41:10.
TheCaseforPhysicsVisualizationinanAnimator'sToolset
253
